Колебания груза на пружине уравнение свободных колебаний
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия.
Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению (см. §2.1):
| . |
В этом соотношении – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закона Гука:
| . |
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими .
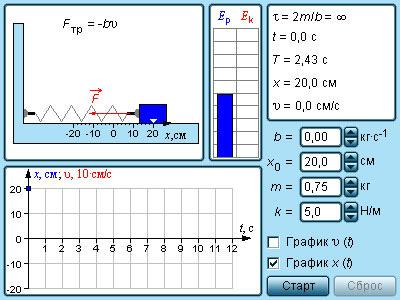
Таким образом, груз некоторой массы , прикрепленный к пружине жесткости , второй конец которой закреплен неподвижно (рис. 2.2.1), составляют систему, способную в отсутствие трения совершать свободные гармонические колебания. Груз на пружине называют линейным гармоническим осциллятором .
 | ||||||||||||||||
| Рисунок 2.2.1. Круговая частота свободных колебаний груза на пружине находится из второго закона Ньютона:
откуда
Частота называется собственной частотой колебательной системы. Период гармонических колебаний груза на пружине равен
При горизонтальном расположении системы пружина–груз сила тяжести, приложенная к грузу, компенсируется силой реакции опоры. Если же груз подвешен на пружине, то сила тяжести направлена по линии движения груза. В положении равновесия пружина растянута на величину , равную
и колебания совершаются около этого нового положения равновесия. Приведенные выше выражения для собственной частоты и периода колебаний справедливы и в этом случае. Строгое описание поведения колебательной системы может быть дано, если принять во внимание математическую связь между ускорением тела и координатой : ускорение является второй производной координаты тела по времени :
Поэтому второй закон Ньютона для груза на пружине может быть записан в виде
или
где Все физические системы (не только механические), описываемые уравнением (*), способны совершать свободные гармонические колебания, так как решением этого уравнения являются гармонические функции вида
Уравнение (*) называется уравнением свободных колебаний . Следует обратить внимание на то, что физические свойства колебательной системы определяют только собственную частоту колебаний или период . Такие параметры колебательного процесса, как амплитуда m и начальная фаза , определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени. Если, например, груз был смещен из положения равновесия на расстояние и затем в момент времени отпущен без начальной скорости, то m = , . Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость Таким образом, амплитуда m свободных колебаний и его начальная фаза определяются начальными условиями . Существует много разновидностей механических колебательных систем, в которых используются силы упругих деформаций. На рис. 2.2.2 показан угловой аналог линейного гармонического осциллятора, совершающий крутильные колебания. Горизонтально расположенный диск висит на упругой нити, закрепленной в его центре масс. При повороте диска на угол возникает момент сил упругой деформации кручения:
Это соотношение выражает закон Гука для деформации кручения. Величина аналогична жесткости пружины . Второй закон Ньютона для вращательного движения диска записывается в виде (см. §1.23)
где – момент инерции диска относительно оси, проходящий через центр масс, – угловое ускорение. По аналогии с грузом на пружине можно получить:
Крутильный маятник широко используется в механических часах. Его называют балансиром. В балансире момент упругих сил создается с помощью спиралевидной пружинки. Свободные колебания пружинного маятника. Общие сведения
Цель работы. Ознакомиться с основными характеристиками незатухающих и затухающих свободных механических колебаний. Задача. Определить период собственных колебаний пружинного маятника; проверить линейность зависимости квадрата периода от массы; определить жесткость пружины; определить период затухающих колебаний и логарифмический декремент затухания пружинного маятника. Приборы и принадлежности. Штатив со шкалой, пружина, набор грузов различной массы, сосуд с водой, секундомер. 1. Свободные колебания пружинного маятника. Общие сведения Колебаниями называются процессы, в которых периодически изменяется одна или несколько физических величин, описывающих эти процессы. Колебания могут быть описаны различными периодическими функциями времени. Простейшими колебаниями являются гармонические колебания – такие колебания, при которых колеблющаяся величина (например, смещение груза на пружине) изменяется со временем по закону косинуса или синуса. Колебания, возникающие после действия на систему внешней кратковременной силы, называются свободными. Рассмотрим одну из простейших колебательных систем – пружинный маятник, представляющий собой груз массой m, подвешенный на абсолютно упругой пружине с коэффициентом жесткости k
Если груз вывести из положения равновесия, отклонив на величину x, то сила упругости возрастает: Fупр = – kx2= – k(x1 + x). Дойдя до положения равновесия, груз будет обладать отличной от нуля скоростью и пройдет положение равновесия по инерции. По мере дальнейшего движения будет увеличиваться отклонение от положения равновесия, что приведет к возрастанию силы упругости, и процесс повторится в обратном направлении. Таким образом, колебательное движение системы обусловлено двумя причинами: 1) стремлением тела вернуться в положении равновесия и 2) инерцией, не позволяющей телу мгновенно остановиться в положении равновесия. В отсутствии сил трения колебания продолжались бы сколь угодно долго. Наличие силы трения приводит к тому, что часть энергии колебаний переходит во внутреннюю энергию и колебания постепенно затухают. Такие колебания называются затухающими. Незатухающие свободные колебания Сначала рассмотрим колебания пружинного маятника, на который не действуют силы трения – незатухающие свободные колебания. Согласно второму закону Ньютона c учетом знаков проекций на ось X Из условия равновесия смещение, вызываемое силой тяжести:
Это уравнение называется дифференциальным уравнением гармонических колебаний пружинного маятника. Из этого уравнения следует, что после прекращения внешнего воздействия, приводящего к первоначальному отклонению системы от положения равновесия, движение груза обусловлено только действием упругой силы (сила тяжести вызывает постоянное смещение). Общее решение однородного дифференциального уравнения второго порядка (2) имеет вид
Данное уравнение называется уравнением гармонических колебаний. Наибольшее отклонение груза от положения равновесия А0 называется амплитудой колебаний. Величина есть круговая или циклическая частота собственных колебаний, связанная с периодом колебаний Т соотношением
Рассмотрим свободные колебания пружинного маятника при наличии силы трения (затухающие колебания). В простейшем и вместе с тем наиболее часто встречающемся случае сила трения пропорциональна скорости υ движения: где r – постоянная, называемая коэффициентом сопротивления. Знак минус показывает, что сила трения и скорость имеют противоположные направления. Уравнение второго закона Ньютона в проекции на ось Х при наличии упругой силы и силы трения Данное дифференциальное уравнение с учетом υ = dx/dt можно записать
где Чтобы получить зависимость смещения x от времени t, необходимо решить дифференциальное уравнение (8). В случае малых затуханий (
где А0 и φ0 – начальная амплитуда и начальная фаза колебаний; Движение груза в этом случае можно рассматривать как гармоническое колебание с частотой ω и переменной амплитудой, меняющейся по закону:
На графике функции (9), рис. 2, пунктирными линиями показано изменение амплитуды (10) затухающих колебаний.
Рис. 2. Зависимость смещения х груза от времени t при наличии силы трения Для количественной характеристики степени затухания колебаний вводят величину, равную отношению амплитуд, отличающихся на период, и называемую декрементом затухания:
Часто используют натуральный логарифм этой величины. Такой параметр называется логарифмическим декрементом затухания:
Если за время t‘ амплитуда уменьшается в n раз, то из уравнения (10) следует, что
Отсюда для логарифмического декремента получаем выражение
Если за время t‘ амплитуда уменьшается в е раз (е = 2,71 – основание натурального логарифма), то система успеет совершить число колебаний
Следовательно, логарифмический декремент затухания – величина, обратная числу колебаний, совершаемых за то время, за которое амплитуда уменьшается в е раз. Чем больше θ, тем быстрее происходит затухание колебаний. 2. Методика эксперимента и экспериментальная установка
Рис. 3. Схема установки Установка состоит из штатива 1 с измерительной шкалой 2. К штативу на пружине 3 подвешиваются грузы 4 различной массы. При изучении затухающих колебаний в задании 2 для усиления затухания используется кольцо 5, которое помещается в прозрачный сосуд 6 с водой. В задании 1 (выполняется без сосуда с водой и кольца) в первом приближении затуханием колебаний можно пренебречь и считать гармоническими. Как следует из формулы (5) для гармонических колебаний зависимость T 2 = f (m) – линейная, из которой можно определить коэффициент жесткости пружины k по формуле
где Задание 1. Определение зависимости периода собственных колебаний пружинного маятника от массы груза. 1. Определить период колебаний пружинного маятника при различных значениях массы груза m. Для этого с помощью секундомера для каждого значения m трижды измерить время t полных n колебаний (n ≥10) и по среднему значению времени 2. По результатам измерений построить график зависимости квадрата периода T2 от массы m. Из углового коэффициента графика определить жесткость пружины k по формуле (16). Результаты измерений для определения периода собственных колебаний
Свободные колебания. Пружинный маятникСвободные колебания могут совершаться под действием внутренних сил только после выведения из положения равновесия всей системы. Чтобы колебания совершались согласно гармоническому закону, нужно, чтобы сила, возвращающая тело в положение равновесия, была пропорциональна смещению тела из равновесного положения и направлена в сторону, противоположную смещению. F ( t ) = m a ( t ) = — m ω 2 x ( t ) . Соотношение говорит о том, что ω является частотой гармонического колебания. Данное свойство характерно для упругой силы в пределах применимости закона Гука: Силы любой природы, которые удовлетворяют условию, называют квазиупругими. То есть груз с массой m , прикрепляющийся к пружине жесткости k с неподвижным концом, изображенным на рисунке 2 . 2 . 1 , составляют систему, способную совершать гармонические свободные колебания при отсутствии силы трения. Груз, располагаемый на пружине, называют линейным гармоническим осциллятором.
Рисунок 2 . 2 . 1 . Колебания груза на пружине. Трения нет. Круговая частотаНахождение круговой частоты ω 0 производится с помощью применения формулы второго закона Ньютона: m a = — k x = m ω 0 2 x . Частоту ω 0 называют собственной частотой колебательной системы. Определение периода гармонических колебаний груза на пружине Т находится из формулы: T = 2 π ω 0 = 2 π m k . Горизонтальное расположение системы пружина-груз, сила тяжести компенсируется силой реакции опоры. При подвешивании груза на пружину направление силы тяжести идет по линии движения груза. Положение равновесия растянутой пружины равняется: x 0 = m g k , тогда как колебания выполняются около нового равновесного состояния. Формулы собственной частоты ω 0 и периода колебаний Т в вышеуказанных выражениях являются справедливыми. При имеющейся математической связи между ускорением тела а и координатой х поведение колебательной системы характеризуется строгим описанием: ускорение является второй производной координаты тела х по времени t : Описание второго закона Ньютона с грузом на пружине запишется как: m a — m x = — k x , или x ¨ + ω 0 2 x = 0 , где свободная частота ω 0 2 = k m . Если физические системы зависят от формулы x ¨ + ω 0 2 x = 0 , тогда они в состоянии совершать свободные колебательные гармонические движения с различной амплитудой. Это возможно, так как применяется x = x m cos ( ω t + φ 0 ) . Свободные колебанияУравнение вида x ¨ + ω 0 2 x = 0 получило название уравнения свободных колебаний. Их физические свойства могут определять только собственную частоту колебаний ω 0 или период Т . Амплитуда x m и начальная фаза φ 0 находят при помощи способа, который вывел их из состояния равновесия начального момента времени. При наличии смещенного груза из положения равновесия на расстояние ∆ l и моменте времени, равном t = 0 , производится его опускание без начальной скорости. Тогда x m = ∆ l , φ 0 = 0 . Если груз находился в положении равновесия, то при толчке передается начальная скорость ± υ 0 , отсюда x m = m k υ 0 , φ 0 = ± π 2 . Амплитуда x m с начальной фазой φ 0 определяются наличием начальных условий.
Рисунок 2 . 2 . 2 . Модель свободных колебаний груза на пружине. Механические колебательные системы отличаются наличием сил упругих деформаций в каждой из них. Рисунок 2 . 2 . 2 показывает угловой аналог гармонического осциллятора, совершающий крутильные колебания. Диск располагается горизонтально и висит на упругой нити, закрепленной в его центре масс. Если его повернуть на угол θ , тогда возникает момент силы упругой деформации кручения M у п р : Данное выражение не соответствует закону Гука для деформации кручения. Величина x аналогична k жесткости пружины. Запись второго закона Ньютона для вращательного движения диска принимает вид I ε = M у п р = — x θ или I θ ¨ = — x θ , где моментом инерции обозначается I = I C , а ε – угловое ускорение. Аналогично с формулой пружинного маятника: ω 0 = x I , T = 2 π I x . Применение крутильного маятника замечено в механических часах. Он получил название балансира, в котором создание момента упругих сил производится при помощи спиралевидной пружины.
Рисунок 2 . 2 . 3 . Крутильный маятник. источники: http://pandia.ru/text/77/494/49063.php http://zaochnik.com/spravochnik/fizika/mehanicheskie-kolebanija/svobodnye-kolebanija-pruzhinnyj-majatnik/ |





 то
то 




 (1)
(1) . Подставляя
. Подставляя  в уравнение (1), получим:
в уравнение (1), получим:  . Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение
. Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение . (2)
. (2) . (3)
. (3) , стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина
, стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина (4)
(4) . Период колебаний определяется
. Период колебаний определяется . (5)
. (5) , (8)
, (8) – коэффициент затухания;
– коэффициент затухания;  ) решение уравнения можно записать следующим образом:
) решение уравнения можно записать следующим образом: , (9)
, (9) – циклическая частота затухающих колебаний при ω >>
– циклическая частота затухающих колебаний при ω >>  ω ≈ ω0.
ω ≈ ω0. . (10)
. (10)
 . (11)
. (11) . (12)
. (12) . (13)
. (13) . (14)
. (14) . (15)
. (15)
 , (16)
, (16) – угловой коэффициент наклона прямой T 2 от m.
– угловой коэффициент наклона прямой T 2 от m. вычислить период
вычислить период  . Результаты занести в табл. 1.
. Результаты занести в табл. 1. , с
, с , с
, с