Механические гармонические колебания
Механические и электромагнитные колебания
Гармонические колебания и их
Характеристики
Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени. Колеба-тельные процессы широко распространены в природе и технике, например качание маят-ника часов, переменный электрический ток и т.д. При колебательном движении маятника изменяется координата его центра масс, в случае переменного тока колеблются напря-жение и ток в цепи. Физическая природа коле-баний может быть разной, поэтому различают колебания механические, электромагнитные и др. Однако различные колебательные процес-сы описываются одинаковыми характеристи-ками и одинаковыми уравнениями. Отсюда следует целесообразность единого подходак изучению колебаний различной физической природы.Например, единый подход к изучению механических и электромагнитных колебаний применялся английским физиком Д.У. Рэлеем (1842—1919), А.Г. Столетовым, русским инженером-экспериментатором П.Н. Лебедевым (1866—1912). Большой вклад в развитие теории колебаний внесли Л.И. Мандельштам (1879—1944) и его ученики.
Колебания называются свободными (или собственными), если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздейст-вий на колебательную систему (систему, совершающую колебания). Простейшим ти-пом колебаний являются гармонические колебания — колебания, при которых колеблющаяся величина изменяется со временем по закону синуса (косинуса). Рассмотрение гармонических колебаний важно по двум причинам:
1) колебания, встречающиеся природе и технике, часто имеют характер, близкий к гармоническому;
2) различные периодические процессы (процессы, повторяющиеся через равные про-межутки времени) можнопредставить как наложение гармонических колебаний. Гармо-нические колебания величины s описываются уравнением типа
 ,(18.1)
,(18.1)
где А — максимальное значение колеблю-щейся величины, называемое амплитудой колебаний, w0 — круговая (циклическая) частота, j — начальная фаза колебания в мо-мент времени t=0, (w0t+j) — фаза колебания в момент времени t.
Фаза колебания определяет значение колеблющейся величины в данный момент времени. Так как косинус изменяется в пределах от +1 до -1, то s может принимать значения от +А до –А.
Промежуток времени Т через который повторяются определенные состояния систе-мы, совершающей гармонические колебания называется периодом колебания. За период колебаний фаза колебания получает приращение 2p, т.е.
Величина, обратная периоду колебаний,
т.е. число полных колебаний, совершаемых в единицу времени, называется частотой коле-баний. Сравнивая (18.2) и (18.3), получим выражение для круговой (угловой) частоты
Единица частоты — герц (Гц): 1 Гц — частота периодического процесса, при которой за 1 с совершается один цикл процесса.
Запишем первую и вторую производные по времени от гармонически колеблющейся величины s:
 ;(18.4)
;(18.4)
 ,(18.5)
,(18.5)
 т.е. имеем гармонические колебания с той же циклической частотой. Амплитуды величин (18.4) и (18.5) соответственно равны Аw0 и Аw0 2 . Фаза величины (18.4) отличается от фазы величины (18.1) на p/2, а фаза величины (18.5) отличается от фазы величины (18.1) на p. Следовательно, в моменты времени, когда s=0, ds/dt приобретает наибольшие значения; когда же s достигает максимального отрицательного значения, то d 2 s/dt 2 приобретает наибольшее положительное значение (рис.18.1).
т.е. имеем гармонические колебания с той же циклической частотой. Амплитуды величин (18.4) и (18.5) соответственно равны Аw0 и Аw0 2 . Фаза величины (18.4) отличается от фазы величины (18.1) на p/2, а фаза величины (18.5) отличается от фазы величины (18.1) на p. Следовательно, в моменты времени, когда s=0, ds/dt приобретает наибольшие значения; когда же s достигает максимального отрицательного значения, то d 2 s/dt 2 приобретает наибольшее положительное значение (рис.18.1).
Из выражения (18.5) следует дифференциальное уравнение гармонических колебаний
 ,(18.6)
,(18.6)
(где s=Acos(w0t+j)). Решением этого уравнения является выражение (18.1).
Изображение гармонических колебаний с помощью вращающегося вектора амплитуды.
Гармонические колебания изображаются графически методом вращающегося вектора амплитуды, или методом векторных диаг-рамм. Для этого из произвольной точки О, выбранной на оси х, под углом j, равным начальной фазе колебания, откладываетсявектор А, модуль которого равен амплитуде А рассматриваемого колебания (рис.18.2).
 Если этот вектор привести во вращение с угловой скорос-тью w0, равной циклической (угловой) частоте колебаний, то проекция конца вектора будет перемещаться по оси x b принимать значения от -А до +А, а колеблю-щаяся величина будет изменяться со временем по закону s=Acos(w0t+j). Таким образом, гармоническое колебание можно представить проекцией на некоторую произвольно выбран-ную ось вектора амплитуды А, отложенного из произвольной точки оси под углом j, равным начальной фазе, и вращающегося с угловой скоростью w0t вокруг этой точки.
Если этот вектор привести во вращение с угловой скорос-тью w0, равной циклической (угловой) частоте колебаний, то проекция конца вектора будет перемещаться по оси x b принимать значения от -А до +А, а колеблю-щаяся величина будет изменяться со временем по закону s=Acos(w0t+j). Таким образом, гармоническое колебание можно представить проекцией на некоторую произвольно выбран-ную ось вектора амплитуды А, отложенного из произвольной точки оси под углом j, равным начальной фазе, и вращающегося с угловой скоростью w0t вокруг этой точки.
В физике часто применяется другой метод, который отличается от метода вращающегося вектора амплитуды лишь по форме. В этом методе колеблющуюся величину представля-ют комплексным числом. Согласно формуле Эйлера, для комплексных чисел
 , (18.7)
, (18.7)
где  — мнимая единица. Поэтому уравнение гармонического колебания (18.1) можно записать в комплексной форме:
— мнимая единица. Поэтому уравнение гармонического колебания (18.1) можно записать в комплексной форме:
 (18.8)
(18.8)
Вещественная часть выражения (18.8)

представляет собой гармоническое колебание. Обозначение Re вещественной части условимся опускать и (18.8) будем записывать в виде
В теории колебаний принимается, что колеблющаяся величина s равна вещественной части комплексного выражения, стоящего в этом равенстве справа.
Механические гармонические колебания
Пусть материальная точка совершает прямолинейные гармонические колебания вдоль оси координат х около положения равновесия, принятого за начало координат. Тогда зависимость координаты х от времени t задается уравнением, аналогичным уравнению (18.1), где s=x:
 . (18.9)
. (18.9)
Согласно выражениям (18.4) и (18.5), ско-рость n и ускорение аколеблющейся точки соответственно равны
 (18.10)
(18.10)
Сила F=ma, действующая на колеблющу-юся материальную точку массой т с (18.9) и (18.10) равна
Следовательно, сила пропорциональна сме-щению материальной точки из положения равновесия и направлена в противоположную сторону (к положению равновесия)
Кинетическая энергия материальной точки, совершающей прямолинейные гармо-нические колебания, равна
 (18.11)
(18.11)
 . (18.12)
. (18.12)
Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы F, равна
 , (18.13)
, (18.13)
 (18.14)
(18.14)
Сложив (18.11) и (18.13), получим формулу для полной энергии:
 . (18.15)
. (18.15)
Полная энергия остается постоянной, так как при гармонических колебаниях справед-лив закон сохранения механической энергии, поскольку упругая сила консервативна.
 18.3. Гармонический осциллятор. Пружин-
18.3. Гармонический осциллятор. Пружин-
Дата добавления: 2016-06-24 ; просмотров: 2365 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Колебания различной природы описываются одинаковыми уравнениями
 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
1. Сколько колебаний совершает математический маятник длиной I = 4,9 м за время t = 5 мин?
Решение. Период колебаний определяется но формуле
Искомое число колебаний можно найти так:
2. Вертикально подвешенная пружина растягивается прикрепленным к ней грузом на  = 0,8 см. Чему равен период Т свободных колебаний груза? (Массой пружины пренебречь.)
= 0,8 см. Чему равен период Т свободных колебаний груза? (Массой пружины пренебречь.)
Решение. Период колебаний груза, прикрепленного к пружине, определяется формулой
где m — масса груза; k — жесткость пружины. На груз действуют сила тяжести  т и сила упругости ynp. Когда груз находится в равновесии, эти силы равны по модулю:
т и сила упругости ynp. Когда груз находится в равновесии, эти силы равны по модулю:
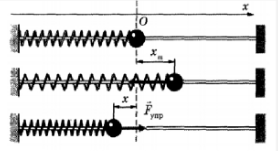
3. На горизонтальном стержне находится груз, прикрепленный к пружине (см. рис. 3.3). Другой конец пружины закреплен. В некоторый момент времени груз смещают от положения равновесия на хm = 10 см и отпускают. Определите координату груза спустя 1/8 периода колебаний. (Трение не учитывать.)
Решение. Зависимость координаты груза от времени выражается так:

4. Груз, прикрепленный к пружине, колеблется на горизонтальном гладком стержне (см. рис. 3.3). Определите отношение кинетической энергии груза к потенциальной энергии системы в момент, когда груз находится в точке, расположенной посредине между крайним положением и положением равновесия.
Решение. Координата указанной точки равна половине амплитуды колебаний:  . Потенциальная энергия системы в момент прохождения груза через эту точку равна:
. Потенциальная энергия системы в момент прохождения груза через эту точку равна:
В любой момент времени выполняется равенство
Поэтому кинетическая энергия груза в момент прохождения им указанной точки определяется так:

 УПРАЖНЕНИЕ 3
УПРАЖНЕНИЕ 3
1. Груз массой 100 г совершает колебания с частотой 2 Гц под действием пружины. Определите жесткость пружины.
2. В Санкт-Петербурге в Исаакиевском соборе висел маятник Фуко, длина которого была равна 98 м. Чему был равен период колебаний маятника?
3. Шарик на пружине сместили на расстояние 1 см от положения равновесия и отпустили. Какой путь пройдет шарик за 2 с, если частота его колебаний v = 5 Гц? (Затуханием колебаний можно пренебречь.)
4. Тело массой 200 г совершает колебания в горизонтальной плоскости с амплитудой 2 см под действием пружины жесткостью 16 Н/м. Определите циклическую частоту колебаний тела и энергию системы.
5. Автомобиль движется по неровной дороге, на которой расстояние между буграми приблизительно равно 8 м. Период свободных колебаний автомобиля на рессорах 1,5 с. При какой скорости автомобиля его колебания в вертикальной плоскости станут особенно заметными?
КРАТКИЕ ИТОГИ ГЛАВЫ 3
1. Колебания различной природы (механические, электрические и др.) описываются одинаковыми уравнениями. Различают свободные, затухающие и вынужденые колебания.
2. Свободные колебания возникают в системе под влиянием внутренних сил после того, как она выведена из состояния равновесия. С течением времени свободные колебания вследствие трения затухают.
3. Вынужденные колебания возникают при действии на систему внешней периодической силы. Эти колебания не затухают до тех пор, пока действует внешняя сила. Пример вынужденных колебаний: раскачивание качелей с помощью периодических толчков.
4. Свободные колебания груза, прикрепленного к пружине, можно описать вторым законом Ньютона. Его следствием применительно к данному случаю является уравнение
где х — смещение груза от положения равновесия; х» — ускорение груза;  — постоянная, зависящая от свойств системы.
— постоянная, зависящая от свойств системы.
5. Решение уравнения, описывающего свободные колебания, выражается через косинус:  или синус.
или синус.
Колебания, происходящие по закону косинуса или синуса, называются гармоническими.
6. Модуль максимального смещения тела хm от положения равновесия называется амплитудой колебаний. Величина  называется циклической частотой колебаний и выражается через частоту колебаний v так:
называется циклической частотой колебаний и выражается через частоту колебаний v так:
7. Промежуток времени, за который система совершает одно полное колебание, называется периодом колебаний. Период можно выразить через циклическую частоту:
8. Величину, стоящую под знаком косинуса или синуса, называют фазой колебаний. Фаза определяет положение колеблющегося тела в произвольный момент времени при заданной амплитуде колебаний.
9. Собственная циклическая частота колебаний груза, прикрепленного к пружине, зависит от его массы т и жесткости пружины k:
Собственная циклическая частота колебаний математического маятника определяется формулой
где g — ускорение свободного падения, а I — длина маятника. Частота (как и период) гармонических колебаний не зависит от амплитуды.
10. Энергия колеблющегося тела при отсутствии сил трения сохраняется:

Вынужденные колебания совершаются при воздействии на систему, в которой могут происходить колебания, периодической силы. При этом может наблюдаться резонанс: резкое возрастание амплитуды вынужденных колебаний при совпадении частоты изменения внешней силы с собственной частотой колебаний системы. Резонанс проявляется отчетливо лишь в системах с малым трением.
Мякишев Г. Я., Физика. 11 класс : учеб. для общеобразоват. учреждений : базовый и профил. уровни / Г. Я. Мякишев, Б. В. Буховцев, В. М. Чаругин; под ред. В. И. Николаева, Н. А. Парфентьевой. — 17-е изд., перераб. и доп. — М. : Просвещение, 2008. — 399 с : ил.
Книги, учебники физике скачать, конспект на помощь учителю и ученикам, учиться онлайн
Если у вас есть исправления или предложения к данному уроку, напишите нам.
Если вы хотите увидеть другие корректировки и пожелания к урокам, смотрите здесь — Образовательный форум.
Механические колебания
теория по физике 🧲 колебания и волны
Колебательное движение очень распространено. Заставить колебаться можно любое тело, если приложить к нему силу — однократно или постоянно. К примеру, если подтолкнуть качели, они начнут качаться вперед-назад, и такое движение будет приблизительно повторяться до тех пор, пока качели полностью не остановятся.
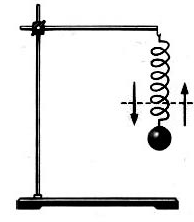
Другой пример колебательного движения — тело, подвешенное к пружине. Если его потянуть вниз и отпустить, то за счет сил упругости оно сначала поднимется вверх, а затем снова опустится вниз, затем движения вверх-вниз будут повторяться. Со временем они прекратятся под действием силы сопротивления воздуха.
Колебаниями можно назвать даже движение гири, которую поднимается тяжелоатлет вверх, а затем опускает в низ. При этом он будет прикладывать к гире силу постоянно. Гиря будет колебаться до тех пор, пока к нему будет прикладываться эта сила.
Колебания — это движения, которые точно или приблизительно повторяются через определенные интервалы времени.
Механические колебания — это колебательные движения, совершаемые физическим телом в механической системе.
Механическая система — совокупность материальных точек (тел), движения которых взаимосвязаны между собой.
Какими бывают колебания?
Напомним, что в механической системе выделяют два вида сил:
- Внутренние силы — это силы, которые возникают между телами внутри системы. Примером внутренних сил служат силы тяготения между телами солнечной системы.
- Внешние силы — силы, которые действуют на тела системы со стороны тел, которые в эту систему не входят. Примером внешней силы может стать сила ветра, под действием которой шарик, подвешенный к опоре за нить, отклоняется в сторону порыва ветра.
Свободные колебания
Свободные колебания — колебания, происходящие в системе под действием внутренних сил после того, как эта система выведена из положения равновесия.
Колебательная система — механическая система, в которой возможно совершение свободных колебаний.
Свободные колебания в колебательной системе могут возникнуть только при наличии двух условий:
- После выведения из равновесия в колебательной системе появляются силы, направленные в сторону положения равновесия. Эти силы стремятся возвратить систему в положение равновесия.
- Трение между телами колебательной системы относительно мало. В противном случае колебания либо сразу затухнут, либо не начнутся совсем.
Примеры свободных колебаний:
- колебания шарика на дне сферической чаши;
- движение качелей после однократного толчка;
- колебания груза на пружине после ее растяжения;
- колебания струны после ее отклонения.

Примером колебательной системы также служит математический маятник — материальная точка, подвешенная на невесомой нерастяжимой нити. В действительности такого маятника не существует. Это идеализированная модель реального маятника, примером которого служит тяжелый шарик, подвешенный на длинной нити. В этом случае размером шарика и растяжением нити можно пренебречь.
В колебательную систему математического маятника входят:
- нить;
- тело, привязанное к нити;
- Земля, в поле тяжести которой находится привязанное к нити тело.
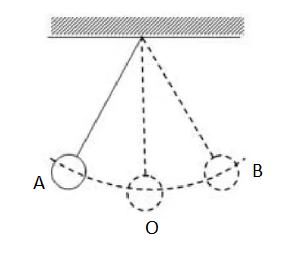
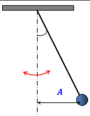
В положении равновесия (точка О) шарик висит на нити и покоится. Если его отклонить от положения равновесия до точки А и отпустить, под действием силы тяжести шарик приблизится к положению равновесия. Так как к этому моменту шарик обретет скорость, он не сможет остановиться и приблизится к точке В. Затем он снова вернется в точку А через положение равновесия в точке О. Шарик будет колебаться, пока не затухнут под действием возникающей силы сопротивления воздуха.
Вынужденные колебания
Вынужденные колебания — колебания тел под действием внешних периодически изменяющихся сил.
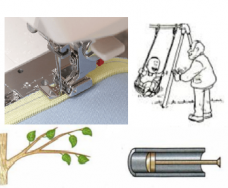
Примерами вынужденных колебаний служат:
- движение поршня в цилиндре;
- раскачивание ветки дерева на ветру;
- движение иглы швейной машинки;
- движение качелей под действием постоянных толчков.
Затухающие и незатухающие колебания
Затухающие колебания — колебания, которые со временем затухают. При этом максимальное отклонение тела от положения равновесия с течением времени уменьшается.
Колебания затухают под действием сил, препятствующих колебательному движению. Так, шарик в сферической чаше перестает колебаться под действием силы трения. Математический маятник и качели перестают совершать колебательные движения за счет силы сопротивления воздуха.
Все свободные колебания являются затухающими, так как всегда присутствует трение или сопротивление среды.
Незатухающими колебаниями могут быть только те, которые совершаются под действием периодической внешней силы (вынужденные колебания). Так, ветка будет раскачиваться до тех пор, пока дует ветер. Когда он перестанет дуть, колебания ветки со временем затухнут. Иголка швейной машинки будет совершать колебательные движения до тех пор, пока швея вращает ручку привода. Когда она перестанет это делать, иголка сразу остановится.
Динамика колебательного движения
Для того чтобы описать количественно колебания тела пол действием силы упругости пружины или колебания шарика, подвешенного на нити, воспользуемся законами механики Ньютона.
Уравнение движения тела, колеблющегося под действием сил упругости
Рассмотрим колебательное движение шарика, вызванное силой упругости, возникшей при растяжении горизонтальной пружины вдоль оси Ох.
Согласно II закону Ньютона произведение массы тела на ускорение равно равнодействующей всех сил приложенных к телу. Поскольку сила трения пренебрежимо мала, мы можем считать, что в этой механической системе действует единственная сила — сила упругости. Учтем, что шарик колеблется вдоль одной прямой, и выберем одномерную систему координат Ох. Тогда:
m a x = F x у п р
Согласно закону Гука, проекция сила упругости прямо пропорциональная смещению шарика из положения равновесия (точки О). Смещение равно координате x шарика, причем проекция силы и координаты имеют разные знаки. Это связано с тем, что сила упругости всегда направлена к точке равновесия, в то время как расстояние от этой точки во время движения увеличивается в обратную сторону. Отсюда делаем вывод, что сила упругости равна:
F x у п р = − k x
где k — жесткость пружины.
Тогда уравнение движения шарики принимает
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.
Так как масса шарики и жесткость пружины для данной колебательной системы постоянны, отношение k m . . — постоянная величина. Отсюда делаем вывод, что проекция a x ускорения тела прямо пропорциональна его координате x, взятой с противоположным знаком.
Пример №1. Груз массой 0,1 кг прикрепили к пружине школьного динамометра жесткостью 40 Н/м. В начальный момент времени пружина не деформирована. После того, как груз отпускают, возникают колебания. Чему равна максимальная скорость груза?
Максимальной скорости груз достигнет при максимальном его отклонении от положения равновесия — в нижней точке траектории. Учтем, что тело движется вниз под действием силы тяжести. Но в то же время на него действует сила упругости, которая возникает в пружине и нарастает до тех пор, пока не становится равной по модулю силе тяжести. Применив III закон Ньютона получим:
∣ ∣ ∣ → F т я ж ∣ ∣ ∣ = ∣ ∣ ∣ → F у п р ∣ ∣ ∣
где y m a x — максимальное отклонение груза от положения равновесия. В этой точке скорость тела будет максимальная. Для нахождения этой величины используем формулу из кинематики:
y m a x = v 2 m a x − v 2 0 2 g . .
Начальная скорость равна нулю. Отсюда:
y m a x = v 2 m a x 2 g . .
m g = k v 2 m a x 2 g . .
Максимальная скорость равна:
v m a x = g √ 2 m k . . = 10 √ 2 · 0 , 1 40 . . ≈ 0 , 71 ( м с . . )
Уравнение движения математического маятника
Ниже на рисунке представлен математический маятник. Если мы выведем из положения равновесия шарик и отпустим, возникнет две силы:
- сила тяжести, направленная вниз;
- сила упругости, направленная вдоль нити.
При колебаниях шарика также будет возникать сила сопротивления воздуха. Но так как она очень мала, мы будем ею пренебрегать.
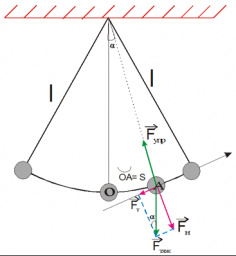
Чтобы описать динамику движения математического маятника, удобно силу тяжести разложить на две составляющие:
→ F т = → F τ + → F n
Причем компонента → F τ направлена перпендикулярно нити, а → F n — вдоль нее.
Компонента → F τ представляет собой проекцию силы тяжести в момент, когда нить маятника отклонена от положения равновесия (точки О) на угол α. Следовательно, она равна:
→ F τ = − → F т sin . α = − m g sin . α
Знак «–» мы здесь поставили по той причине, что компоненты силы тяжести → F τ и α имеют противоположные знаки. Ведь если отклонить шарик на угол α>0, то составляющая → F τ будет направлена в противоположную сторону, так как она будет пытаться вернуть шарик в положение равновесия. И ее проекция будет отрицательной. Если же шарик отклонить на угол α → F τ будет направлена в обратную сторону. В этом случае ее проекция будет положительной.
Обозначим проекцию ускорения маятника на касательную к его траектории через a τ . Эта проекция характеризует быстроту изменения модуля скорости маятника. Согласно II закону Ньютона:
m a τ = − m g sin . α
Разделим обе части выражения на массу шарика m и получим:
При малом отклонении нити маятника от вертикали можно считать, что sin . α ≈ α (при условии, что угол измерен в радианах). Тогда:
Внимание! Чтобы перевести градусы в радианы, нужно умножить градусы на число π и поделить результат на 180. К примеру 2 о = 2∙3,14/180 рад., или 2 о = 0,035 рад.
При малом отклонении также дугу ОА мы можем принять за длину отрезка OA, который мы примем за s. Тогда угол α будет равен отношению противолежащего катета (отрезка s) к гипотенузе (длине нити l):
Так как ускорение свободного падения и длина нити для данной колебательной системы постоянны, то отношение g l . . — тоже постоянная величина.
Это уравнение похоже на то уравнение, которое мы получили для описания колебательного движения шарика под действием силы упругости. И оно также позволяет сделать вывод, что ускорение прямо пропорционально координате.
Пример №2. Определить длину нити, если шарик, подвешенный к ней, отклонится на 1 см. При этом нить образовала с вертикалью угол, равный 1,5 о .
При отклонениях на малый угол мы можем пользоваться следующей формулой:
Чтобы найти длину нити, нужно выразить угол α в радианах:
1 , 5 ° = 3 , 14 · 1 , 5 180 . . ≈ 0 , 026 ( р а д )
Тогда длина нити равна:
l = s α . . = 0 , 01 0 , 026 . . ≈ 0 , 385 ( м ) = 38 , 5 ( с м )
Основные характеристики колебательного движения
Амплитуда — максимальное отклонение тела от положения равновесия. Обозначается буквой A, иногда — xmax. Единиц измерения — метр (м).
Период — время совершения одного полного колебания. Обозначается буквой T. Единица измерения — секунда (с).
Частота — количество колебаний, совершенных в единицу времени. Обозначается как ν («ню»). Единица измерения — 1/секунда, или секунда –1 , или герц (1/с, или с –1 , или Гц).
Период и частота колебаний связаны между собой следующей формулой:
Период колебаний также можно вычислить, зная количество совершенных колебаний N за время t:
Поскольку частота — это величина, обратная периоду колебаний, ее можно выразить в виде:
Пример №3. Определить частоту колебаний груза, если суммарный путь, который он прошел за 2 секунды под действием силы упругости, составил 1 м. Амплитуда колебаний равна 10 см.
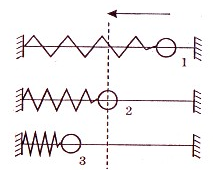
Во время одного колебания груз проходит расстояние, равное 4 амплитудам. Посмотрите на рисунок. Положение равновесия соответствует состояние 2. Чтобы совершить одно полное колебание, сначала груз отводят в положение 1. Когда его отпускают, он проходит путь 1–2 и достигает положения равновесия. Этот путь равен амплитуде колебаний. Затем он продолжает движение до состояния 3. И в это время он проходит расстояние 2–3, равное еще одной амплитуде колебаний. Чтобы вернуться в исходное положение (состояние 1), нужно снова проделать путь в обратном направлении: сначала 3–2, затем 2–1.
Следовательно, количество колебаний равно отношению пройденного пути к амплитуде, помноженной на 4:
Так как мы знаем, что эти колебания совершались в течение 2 секунд, для вычисления частоты мы можем использовать формулу:
ν = N t . . = s 4 A t . . = 1 4 · 0 , 1 · 2 . . = 1 , 25 ( Г ц )
В таблице представлены данные о положении шарика, колеблющегося вдоль оси Ох, в различные моменты времени.

Каков период колебаний шарика?
Алгоритм решения
Решение
Из таблицы видно, что амплитуда колебаний равна 15 мм. Следовательно, максимальное отклонение в противоположную сторону составляет –15 мм. Расстояние между двумя максимальными отклонениями от положения равновесия шарика равно половине периода колебаний. Этим значения в таблице соответствует время 1 и 3 секунды соответственно. Следовательно, разница между ними — половина периода. Тогда период будет равен удвоенной разнице во времени:
T = 2 ( t 2 − t 1 ) = 2 ( 3 − 1 ) = 4 ( с )
pазбирался: Алиса Никитина | обсудить разбор | оценить
Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остается растянутой. Как ведут себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вверх к положению равновесия?
Для каждой величины определите соответствующий характер изменения:
| 1) | увеличивается |
| 2) | уменьшается |
| 3) | не изменяется |
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.

Алгоритм решения
Решение
Потенциальная энергия пружины определяется формулой:
где k — коэффициент жесткости пружины, а x — ее удлинение. Величина x была максимальной в нижней точке траектории. Когда пружина начинает сжиматься, она уменьшается. Так как потенциальная энергия зависит от квадрата x прямо пропорционально, то при уменьшении этой величины потенциальная энергия пружины тоже уменьшается.
Кинетическая энергия тела определяется формулой:
В нижней точке траектории скорость шарика была равна нулю. Но к этому времени потенциальная энергия пружины достигла максимума. Она начинает с ускорением поднимать шарик вверх, сжимаясь. Следовательно, скорость растет. Так как кинетическая энергия зависит от квадрата скорости тела прямо пропорционально, то при увеличении скорости этой величины кинетическая энергия шарика тоже увеличивается.
Потенциальная энергия тел в поле тяжести земли определяется формулой:
Масса и ускорение свободного падения шарика — постоянные величины. Следовательно, потенциальная энергия зависит только от расстояния до поверхности земли. Когда пружина поднимает шарик, расстояние между ним и землей увеличивается. Так как потенциальная энергия зависит от расстояния прямо пропорционально, то при его увеличении потенциальная энергия шарика тоже растет.
pазбирался: Алиса Никитина | обсудить разбор | оценить
В таблице представлены данные о положении шарика, прикреплённого к пружине и колеблющегося вдоль горизонтальной оси Ох, в различные моменты времени.

Из приведённого ниже списка выберите два правильных утверждения и укажите их номера.
А) Потенциальная энергия пружины в момент времени 1,0 с максимальна.
Б) Период колебаний шарика равен 4,0 с.
В) Кинетическая энергия шарика в момент времени 2,0 с минимальна.
Г) Амплитуда колебаний шарика равна 30 мм.
Д) Полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна.
Алгоритм решения
- Проверить истинность каждого утверждения.
- Выбрать 2 верных утверждения.
Решение
Согласно утверждению «А», потенциальная энергия пружины в момент времени 1,0 с максимальна. Потенциальная энергия пружины максимальна, когда она отклоняется от положения равновесия на максимальную возможную величину. Из таблицы видно, что в данный момент времени ее отклонение составило 15 мм, что соответствует амплитуде колебаний (наибольшему отклонению от положения равновесия). Следовательно, утверждение «А» — верно.
Согласно утверждению «Б», период колебаний шарика равен 4,0 с. Один период колебаний включает в себя 4 фазы. В течение каждой фазы шарик на пружине проделывает путь, равный амплитуде. Следовательно, мы можем найти период колебаний, умножив время одной фазы на 4. В момент времени t = 0 с, шарик находился в положении равновесия. Первый раз он отклонился на максимальную величину (15 мм) в момент времени t = 1,0 с. Значит, период колебаний равен 1∙4 = 4 с. Следовательно, утверждение «Б» — верно.
Согласно утверждению «В», кинетическая энергия шарика в момент времени 2,0 с минимальна. В этот момент времени, согласно данным таблицы, шарик проходит положение равновесия. В этом положении скорость шарика всегда максимальна. Поэтому кинетическая энергия, которая зависит от квадрата скорости прямо пропорционально, минимальной быть не может. Следовательно, утверждение «В» — неверно.
Согласно утверждению «Г», амплитуда колебаний шарика равна 30 мм. Амплитуда колебаний — есть расстояние от положения равновесия до точки максимального отклонения шарика. В данном случае оно равно 15 мм. Следовательно, утверждение «Г» — неверно.
Согласно утверждению «Д», полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна. Полная механическая энергия колебательной системы — это совокупность кинетической и потенциальной энергий. И при отсутствии сил трения она остается величиной постоянной. Она лишь превращается из одного вида энергии в другую. Следовательно, утверждение «Д» — неверно.
pазбирался: Алиса Никитина | обсудить разбор | оценить
http://edufuture.biz/index.php?title=%D0%9F%D1%80%D0%B8%D0%BC%D0%B5%D1%80%D1%8B_%D0%B7%D0%B0%D0%B4%D0%B0%D1%87_%D0%BF%D0%BE_%D1%84%D0%B8%D0%B7%D0%B8%D0%BA%D0%B5_11_%D0%BA%D0%BB%D0%B0%D1%81%D1%81-3
http://spadilo.ru/mexanicheskie-kolebaniya/