Компонентные и топологические уравнения гидравлической системы
В гидравлической системе фазовыми переменными типа потока являются расходы (  , м 3 /с, а типа потенциала — давления р, Н/м 2 (Па).
, м 3 /с, а типа потенциала — давления р, Н/м 2 (Па).
При выводе компонентных уравнений используем уравнения Эйлера, Навье—Стокса и Гука, полученные для одномерной системы с распределенными параметрами.
Для перехода к модели с сосредоточенными параметрами осуществим аппроксимацию моделей микроуровня путем замены частных производных фазовых переменных по пространственным координатам отношениями конечных разностей.
Уравнение Эйлера для трубопровода постоянного сечения
 (3.16)
(3.16)
где V — скорость потока жидкости в трубопроводе; р — плотность жидкости; х — геометрическая координата.
Разделим трубопровод на ряд участков длиной I и заменим частную производную др/дх отношением конечной разности
 (3.17) (3.17)
(3.17) (3.17)
где Р1, Р2 — давления в узлах дискретизации 1 и 2, т.е. на границах выделенных участков трубопровода.
Здесь учтено, что градиент давления вдоль трубопровода  р = др/дх отрицателен (давление падает по мере удаления от
р = др/дх отрицателен (давление падает по мере удаления от
Расход жидкости в трубопроводе выразим через скорость потока  :
:
 (3.18) (3.18)
(3.18) (3.18)
где А — площадь поперечного сечения трубопровода.
Подставим значения др/дх из (3.17) и из (3.18) в уравнение (3.16) и найдем выражение для определения р:

 (3.19) (3.19)
(3.19) (3.19)
где т г — коэффициент массы, кг/м 4 ; V — объем жидкости в выделенном участке трубопровода длиной I: У=А  ; тж — масса жидкости в этом участке.
; тж — масса жидкости в этом участке.
С учетом (3.19) уравнение Эйлера (3.16) после дискретизации приводится к виду
 (3.20)
(3.20)
Сопоставляя (3.20) с выражением (3.1), приходим к выводу, что уравнение Эйлера отображает только инерционные свойства жидкости.
Рассмотрим линеаризованное уравнение Навье – Стокса
 (3.21)
(3.21)
где  — коэффициент линеаризованного вязкого трения жидкости.
— коэффициент линеаризованного вязкого трения жидкости.
Учитывая выражения (3.17) и (3.18), получаем

 (3.22)
(3.22)
где  — коэффициент гидравлического сопротивления,
— коэффициент гидравлического сопротивления, 
С учетом выражений (3.19) и (3.22) уравнение Навье – Стокса после дискретизации приводиться к виду
 (3.23)
(3.23)
Из выражения (3.23) следует, что уравнение Навье – Стокса отображает инерционные и диссипативные свойства жидкости. В этом случае  где
где  — величина потерь давления на преодоление трения при движении потока жидкости в трубопроводе, а
— величина потерь давления на преодоление трения при движении потока жидкости в трубопроводе, а  — затраты давления на разгон жидкости. Полагая и аддитивными величинами, выделим инерционный и диссипативный элементы участка трубопровода. Компонентное уравнение инерционного элемента соответствует выражению (3.20), а диссипативного элемента имеет вид
— затраты давления на разгон жидкости. Полагая и аддитивными величинами, выделим инерционный и диссипативный элементы участка трубопровода. Компонентное уравнение инерционного элемента соответствует выражению (3.20), а диссипативного элемента имеет вид
 (3.24)
(3.24)
 (3.25)
(3.25)
позволяет учесть упругие свойства жидкости. Выразим скорость потока v через расход Q по формуле (3.18). Тогда  Заменим
Заменим  отношением конечной разности
отношением конечной разности
 (3.26)
(3.26)
где  — расходы в узлах дискретизации трубопровода 1 и 2;
— расходы в узлах дискретизации трубопровода 1 и 2;  — изменение расхода, обусловленное сжимаемостью жидкости.
— изменение расхода, обусловленное сжимаемостью жидкости.
В выражении (3.26) учтено, что при возрастании давления происходит увеличение объемной деформации жидкости и величина расхода жидкости при удалении от источника уменьшается.
На основе уравнения (3.25) с учетом выражения (3.26) найдем выражение для определения давления упругого элемента, полагая Е не зависящим от р:
 (3.27)
(3.27)
 (3.28)
(3.28)
где  — коэффициент гидравлической жесткости,
— коэффициент гидравлической жесткости,  ; Е – модуль объемной упругости жидкости,
; Е – модуль объемной упругости жидкости,  .
.
В результате получаем компонентное уравнение упругого элемента гидравлической системы
 (3.29)
(3.29)
Фазовые переменные ,  , представляют собой внутренние потенциалы исследуемой гидравлической системы, характеризующие взаимодействие выделенных дискретных элементов и определяющие потери давления источника на преодоление сил инерции жидкости и сообщение ей кинетической энергии, на деформацию жидкости и изменение ее потенциальной энергии, а также на преодоление сил внутреннего трения жидкости.
, представляют собой внутренние потенциалы исследуемой гидравлической системы, характеризующие взаимодействие выделенных дискретных элементов и определяющие потери давления источника на преодоление сил инерции жидкости и сообщение ей кинетической энергии, на деформацию жидкости и изменение ее потенциальной энергии, а также на преодоление сил внутреннего трения жидкости.
Коэффициенты  , и
, и  являются параметрами соответственно инерционных, упругих и диссипативных элементов гидравлической системы.
являются параметрами соответственно инерционных, упругих и диссипативных элементов гидравлической системы.
Топологические уравнения имеют вид
 ; (3. 30)
; (3. 30)
 (3.31)
(3.31)
Первое уравнение выражает условие равновесия потенциалов, действующих на сосредоточенные массы, а второе – условие непрерывности потоков жидкости.
Разработка динамической модели гидравлической системы. Моделирование и анализ статического состояния гидросистемы
Страницы работы



Содержание работы
СОДЕРЖАНИЕ
1 Исходные данные 2
2 Разработка динамической модели гидравлической системы 3
2.1 Компонентные и топологические уравнения гидросистемы 4
2.2 Описание гидросистемы и разработка схемы динамической модели 4
2.3 Построение орграфа гидросистемы 7
2.4 Составление матрицы инциденций 9
2.5 Использование узлового метода 10
2.6 Определение параметров элементов модели 13
2.7 Использование структурно–матричного метода, формирование математической модели 13
3 Моделирование и анализ статического состояния гидросистемы 16
3.1 Разработка статической модели гидросистемы 16
3.2 Формирование матрицы Якоби в статической модели гидросистемы
3.3 Решение систем уравнений статической модели методом Ньютона 18
4 Моделирование и анализ переходных процессов 20
4.1 Формирование матрицы Якоби в динамической модели 21
4.2 Выбор параметров интегрирования 22
4.3 Решение системы дифференциального уравнения методом Эйлера 24
4.3 Решение системы дифференциального уравнения методом Эйлера 27
Приложение А 29
Приложение Б 43
Приложение В 44
1 ИСХОДНЫЕ ДАННЫЕ
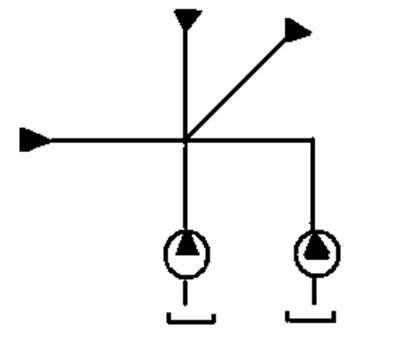
Рисунок 1 – Принципиальная схема гидросистемы
Таблица 1 — Параметры гидросистемы
Толщина стенки трубопровода, м

Коэф-нт местных сопротивлений

Давление потребителя, Па
Масло веретенное АУ:  ;
;
 Ес=1,7*10 8 Па.
Ес=1,7*10 8 Па.
Сталь: Етр=2,1*10 11 Па
Коэффициент потерь на трение при турбулентном потоке
2 РАЗРАБОТКА динамической модели гидравлической системы
2.1 Компонентные и топологические уравнения гидросистемы
В методе сосредоточенных масс, каждый элемент рассматривается простым, т. е. наделенный одним физическим свойством. Состояние простого элемента характеризуется одной фазовой переменной типа потока и одной типа потенциала, математическая модель, выражающая зависимость между этими переменными называется компонентным уравнением. Компонентное уравнение получается, на основе физических законов имеет, следующий вид:
— для инерционного элемента:
— для диссипативного элемента:
— для упругого элемента:
Для получения полной математической модели необходимо объединить все компоненты уравнения в общую систему уравнения. Объединение осуществляется на основе физических законов, выражающих условие равновесия и непрерывности, уравнение этих законов называют топологическим уравнением, и они описывают характер взаимодействия между простыми элементами.
— Условие равновесия записываются для фазовых переменных типа потенциала:
— Условие непрерывности для фазовой переменной типа потока:

Если фазовая переменная векторной величины, учитывает только топологию, а компонентных уравнениях используются только абсолютные значения.
В гидравлической системе фазовая переменная типа потока расхода – Q, м 3 /с, а типа потенциала давление — р, Па или Н*м 2 .
— Компонентное уравнение инерционного элемента:
получается на основе уравнения Эйлера.
где, р — плотность;
V – объем жидкости в выделенном участке трубопровода длинной l.
где, А – площадь поперечного сечения трубопровода;
mж – масса жидкости в участке трубопровода.
Инерционные свойства обусловлены затратами давления на разгон жидкости.
— Компонентное уравнение диссипативного элемента:
получается с учетом уравнения Навье – Стокса.

где,  коэффициент гидравлического сопротивления
коэффициент гидравлического сопротивления  .
.
где,  коэффициент для линеаризованного вязкого трения жидкости (по справочнику).
коэффициент для линеаризованного вязкого трения жидкости (по справочнику).
— Компонентное уравнение упругого элемента:
где, сг – коэффициент гидравлической жесткости Н/м 5 .
где, Е – модуль объемной упругости жидкости Н/м 2 .
1 Условие равновесия потенциалов:

2 Условие непрерывности потоков:
 .
.
2.2 Описание гидросистемы и разработка схемы динамической модели
На рисунке 1 приведена принципиальная схема, гидравлической системы, состоящей: из трех гидромагистралей потребителя – 1,4,5; двух насосов – 2,3 и соединительной магистрали – 2,3.
При построении динамической модели учтем основные свойства гидравлической системы, будем считать магистрали сравнительно короткими и рассматривать их, как дискретные элементы (магистрали), рассматриваем как сосредоточенную, так как длина соединительной магистрали значительно меньше магистрали потребителей, то в первом приближении массой жидкости в ней можно пренебречь.
Внешнее воздействие на гидросистему создаются потребителями и насосами, при чем воздействие потребителей, представляет собой источники потенциалов, воздействие насосов, источники потока. Источники потенциалов описываются функциями давлений Pi=F(t), характеризующий потери напора в гидроаппарате и потребителя, а источник потока, функция расхода (подача насоса), Qн=const.
Упругий элемент, учитывающий сжимаемость в газожидкостной смеси и деформированность стенок трубопровода, подключают в точку ветвления гидравлической магистрали. Он осуществляет дифференциальное соединение всех инерционных элементов и источников потока. На рисунке 2 представлена схема динамической модели гидросистемы.
Математические модели в процедурах анализа на макроуровне
Исходные уравнения моделей.Исходное математическое описание процессов в объектах на макроуровне представлено системами обыкновенных дифференциальных и алгебраических уравнений. Аналитические решения таких систем при типичных значениях их порядков в практических задачах получить не удается, поэтому в САПР преимущественно используются алгоритмические модели. В этом параграфе изложен обобщенный подход к формированию алгоритмических моделей на макроуровне, справедливый для большинства приложений.
Исходными для формирования математических моделей объектов на макроуровне являются компонентные и топологические уравнения.
Компонентными уравнениями называют уравнения, описывающие свойства элементов (компонентов), другими словами, это уравнения математических моделей элементов (ММЭ).
Топологические уравнения описывают взаимосвязи в составе моделируемой системы.
В совокупности компонентные и топологические уравнения конкретной физической системы представляют собой исходную математическую модель системы (ММС).
Очевидно, что компонентные и топологические уравнения в системах различной физической природы отражают разные физические свойства, но могут иметь одинаковый формальный вид. Одинаковая форма записи математических соотношений позволяет говорить о формальных аналогиях компонентных и топологических уравнений. Такие аналогии существуют для механических поступательных, механических вращательных, электрических, гидравлических (пневматических), тепловых объектов. Наличие аналогий приводит к практически важному выводу: значительная часть алгоритмов формирования и исследования моделей в САПР оказывается инвариантной и может быть применена к анализу проектируемых объектов в разных предметных областях. Единство математического аппарата формирования ММС особенно удобно при анализе систем, состоящих из физически разнородных подсистем.
В перечисленных выше приложениях компонентные уравнения имеют вид:
и топологические уравнения
Различают фазовые переменные двух типов, их обобщенные наименования – фазовые переменные типа потенциала (например, электрическое напряжение) и типа потока (например, электрический ток). Каждое компонентное уравнение характеризует связи между разнотипными фазовыми переменными, относящимися к одному компоненту (например, закон Ома описывает связь между напряжением и током в резисторе), а топологическое уравнение – связи между однотипными фазовыми переменными в разных компонентах.
Модели можно представлять в виде систем уравнений или в графической форме, если между этими формами установлено взаимно однозначное соответствие. В качестве графической формы часто используют эквивалентные схемы.
Примеры компонентных и топологических уравнений.Рассмотрим несколько типов систем.
Электрические системы. В электрических системах фазовыми переменными являются электрические напряжения и токи. Компонентами систем могут быть простые двухполюсные элементы и более сложные двух- и многополюсные компоненты. К простым двухполюсникам относятся следующие элементы: сопротивление, емкость и индуктивность, характеризуемые одноименными параметрами R, С, L. В эквивалентных схемах эти элементы обозначают в соответствии с рис. 3.2,а.
Компонентные уравнения простых двухполюсников:
для R: u = i R (закон Ома), (3.3)
для C: i = C du/dt, (3.4)
для L: u = L di/dt, (3.5)
где и – напряжение (точнее, падение напряжения на двухполюснике), i – ток.
Эти модели лежат в основе моделей других возможных более сложных компонентов. Большая сложность может определяться нелинейностью уравнений (3.3) – (3.5) (т.е. зависимостью R, С, L от фазовых переменных), или учетом зависимостей параметров R, С, L от температуры, или наличием более двух полюсов. Однако многополюсные компоненты могут быть сведены к совокупности взаимосвязанных простых элементов.
Топологические уравнения выражают законы Кирхгофа для напряжений (ЗНК) и токов (ЗТК). Согласно ЗНК, сумма напряжений на компонентах вдоль любого замкнутого контура в эквивалентной схеме равна нулю, а в соответствии с ЗТК сумма токов в любом замкнутом сечении эквивалентной схемы равна нулю:


где Кр – множество номеров элементов р-гоконтура, Jq – множество номеров элементов, входящих в q-есечение.
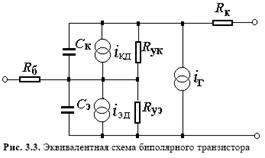
Примером ММ сложного компонента может служить модель транзистора. На рис. 3.3 представлена эквивалентная схема биполярного транзистора, на которой зависимые от напряжений источники тока iэд = iтэехр(uэ/(mφT)) и iкд = iткехр(uк/(mφT)) отображают статические вольтамперные характеристики p-n переходов, iтэ и iтк – тепловые токи переходов, mφT – температурный потенциал, иэ и ик_ напряжения на эмиттерном и коллекторном переходах, Сэ и Ск – емкости переходов, Rуэ и Rук – сопротивления утечки переходов, R6 и RK – объемные сопротивления тел базы и коллектора, iг = Biэд– Bиiкд _источник тока, моделирующий усилительные свойства транзистора, В и Ви – прямой и инверсный коэффициенты усиления тока базы. Здесь иэ, ик, iэд, iкд, iг– фазовые переменные, а остальные величины – параметры модели транзистора.
Механические системы. Фазовыми переменными в механических поступательных системах являются силы и скорости. Используют одну из двух возможных электромеханических аналогий. В дальнейшем будем использовать ту из них, в которой скорость относят к фазовым переменным типа потенциала, а силу считают фазовой переменной типа потока. Учитывая формальный характер подобных аналогий, в равной мере можно применять и противоположную терминологию.
Компонентное уравнение, характеризующее инерционные свойства тел, в силу второго закона Ньютона имеет вид
F= M du/dt (3.8)
где F – сила; M – масса; u – поступательная скорость.
Упругие свойства тел описываются компонентным уравнением, которое можно получить из уравнения закона Гука. В одномерном случае (если рассматриваются продольные деформации упругого стержня)
где G – механическое напряжение; Е – модуль упругости; ε = Δl/l – относительная деформация; Δl – изменение длины l упругого тела под воздействием G. Учитывая, что G = F/S, где F – сила, S – площадь поперечного сечения тела, и дифференцируя (3.9), имеем
где g =(SE/l)- жесткость (величину, обратную жесткости, называют гибкостью LM); и = d(Δl)/dt – скорость.
Диссипативные свойства в механических системах твердых тел выражаются соотношениями, характеризующими связь между силой трения и скоростью взаимного перемещения трущихся тел, причем в этих соотношениях производные сил или скоростей не фигурируют, как и в случае описания с помощью закона Ома диссипативных свойств в электрических системах.
Топологические уравнения характеризуют, во-первых, закон равновесия сил: сумма сил, приложенных к телу, включая силу инерции, равна нулю (принцип Даламбера), во-вторых, закон скоростей, согласно которому сумма относительной, переносной и абсолютной скоростей равна нулю.
В механических вращательных системах справедливы компонентные и топологические уравнения поступательных систем с заменой поступательных скоростей на угловые, сил – на вращательные моменты, масс – на моменты инерции, жесткостей – на вращательные жесткости.
Условные обозначения простых элементов механической системы показаны на рис. 3.2,б.
Нетрудно заметить наличие аналогий между электрической и механической системами. Так, токам и напряжениям в первой из них соответствуют силы (либо моменты) и скорости механической системы, компонентным уравнениям (3.4) и (3.5) и фигурирующим в них параметрам С и L, – уравнения (3.8) и (3.10) и параметры М и LM, очевидна аналогия и между топологическими уравнениями. Далее параметры С и М будем называть емкостными (емкостного типа), параметры L и LM – индуктивными (индуктивного типа), а параметры R и Rтр =  – резистивными (резистивного типа).
– резистивными (резистивного типа).
Имеется и существенное отличие в моделировании электрических и механических систем: первые из них одномерны, а процессы во вторых часто приходится рассматривать в двух- (2D) или трехмерном (3D) пространстве. Следовательно, при моделировании механических систем в общем случае в пространстве 3D нужно использовать векторное представление фазовых переменных, каждая из которых имеет шесть составляющих, соответствующих шести степеням свободы.
Однако отмеченные выше аналогии остаются справедливыми, если их относить к проекциям сил и скоростей на каждую пространственную ось, а при графическом представлении моделей использовать шесть эквивалентных схем – три для поступательных составляющих и три для вращательных.
Гидравлические системы. Фазовыми переменными в гидравлических системах являются расходы и давления. Как и в предыдущем случае, компонентные уравнения описывают свойства жидкости рассеивать или накапливать энергию.
Рассмотрим компонентные уравнения для жидкости на линейном участке трубопровода длиной Δl и воспользуемся уравнением Навье-Стокса в следующей его форме (для ламинарного течения жидкости)

где р – плотность жидкости; U– скорость; Р – давление; а – коэффициент линеаризованного вязкого трения. Так как U = Q/S, где Q – объемный расход; S – площадь поперечного сечения трубопровода, то, заменяя пространственную производную отношением конечных разностей, имеем
 ,
,

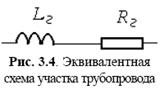
где ΔР – падение давления на рассматриваемом участке трубопровода. Lг= Δlρ/S – гидравлическая индуктивность, отражающая инерционные свойства жидкости, Rг= 2a/ρ – гидравлическое сопротивление, отражающее вязкое трение.
Примечание.В трубопроводе круглого сечения радиусом r удобно использовать выражение для гидравлического сопротивления при ламинарном течении: Rг = δυΔl/πr 4 ), где υ – кинематическая вязкость; в случае турбулентного характера течения жидкости компонентное уравнение для вязкого трения имеет вид  при
при  .
.
Интерпретация уравнения (3.11) приводит к эквивалентной схеме рис. 3.4.
Явление сжимаемости жидкости описывается компонентным уравнением, вытекающим из закона Гука
Дифференцируя (3.12) и учитывая, что объемный расход Q связан со скоростью U= d(Δl)/dt соотношением Q = U S, получаем
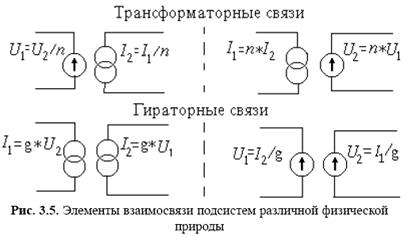
Связь подсистем различной физической природы. Используют следующие способы моделирования взаимосвязей подсистем: с помощью трансформаторной, гираторной связей и с помощью зависимости параметров компонентов одной подсистемы от фазовых переменных другой. В эквивалентных схемах трансформаторные и гираторные связи представлены зависимыми источниками фазовых переменных, показанными на рис. 3.5. На этом рисунке k и п – коэффициенты трансформации; g – передаточная проводимость; Uj и Ij ,- фазовые переменные в j-й цепи; j=1 соответствует первичной, а j=2 – вторичной цепи.
Представление топологических уравнений.Известен ряд методов формирования ММС на макроуровне. Получаемые с их помощью модели различаются ориентацией на те или иные численные методы решения и набором базисных, переменных, т.е. фазовых переменных, остающихся в уравнениях итоговой ММС. Общим для всех методов является исходная совокупность топологических и компонентных уравнений (3.1)-(3.2).
При записи топологических уравнений удобно использовать промежуточную графическую форму – представление модели в виде эквивалентной схемы, состоящей из двухполюсных элементов. Общность подхода при этом сохраняется, так как любой многополюсный компонент можно заменить подсхемой из двухполюсников. В свою очередь эквивалентную схему можно рассматривать как направленный граф, дуги которого соответствуют ветвям схемы. Направления потоков в ветвях выбираются произвольно (если реальное направление при моделировании окажется противоположным, то это приведет лишь к отрицательным численным значениям потока).
Примернекоторой простой эквивалентной схемы и соответствующего ей графа приведен на рис. 3.6. Для конкретности и простоты изложения на рис. 3.6 использованы условные обозначения, характерные для электрических эквивалентных схем, по той же причине далее в этом параграфе часто применяется электрическая терминология. Очевидно, что поясненные выше аналогии позволяют при необходимости легко перейти к обозначениям и терминам, привычным для механиков.
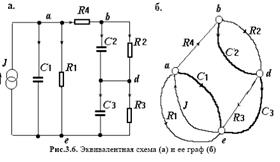
Для получения топологических уравнений все ветви эквивалентной схемы разделяют на подмножества хорд и ветвей дерева. Имеется в виду покрывающее (фундаментальное) дерево, т.е. подмножество из (β-1 дуг, не образующее ни одного замкнутого контура, где β – число вершин графа (узлов эквивалентной схемы). На рис. 3.6,б показан граф эквивалентной схемы рис. 3.6,а, толстыми линиями выделено одно из возможных покрывающих деревьев.
Выбор дерева однозначно определяет вектора напряжений Ux и токов Ix хорд, напряжений Uвд и токов Iвд ветвей дерева и приводит к записи топологических уравнений в виде
где М– матрица контуров и сечений, М Т – транспонированная М-матрица.
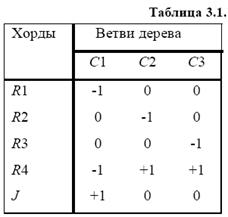
В М-матрице число строк соответствует числу хорд, число столбцов равно числу ветвей дерева. М-матрица формируется следующим образом. Поочередно к дереву подключаются хорды. Если при подключении к дереву р-й хорды q-я ветвь входит в образовавшийся контур, то элемент Mpq матрицы равен +1 при совпадении направлений ветви и подключенной хорды, Mpq= -1 при несовпадении направлений. В противном случае Mpq = 0.
Для схемы на рис. 3.6 М-матрица представлена в виде табл. 3.1
Особенности эквивалентных схем механических объектов.Для каждой степени свободы строят свою эквивалентную схему. Каждому телу с учитываемой массой соответствует узел схемы (вершина графа). Один узел, называемый базовым, отводится телу, отождествляемому с инерциальной системой отсчета.
Каждый элемент массы изображают ветвью, соединяющей узел соответствующего массе тела с базовым узлом; каждый элемент упругости – ветвью, соединяющей узлы тел, связанных упругой связью; каждый элемент трения – ветвью, соединяющей узлы трущихся тел. Внешние воздействия моделируются источниками сил i
В качестве примера на рис. 3.7,а изображена некоторая механическая система – тележка, движущаяся по дороге и состоящая из платформы А, колес В1, В2 и рессор С1, C2. На рис. 3.7,б приведена эквивалентная схема для вертикальных составляющих сил и скоростей, на которой телам системы соответствуют одноименные узлы, учитываются массы платформы и колес, упругость рессор, трение между колесами и дорогой; неровности дороги вызывают воздействие на систему, изображенное на рис. 3.7,б источниками силы.
Характеристика методов формирования ММС.Исходную систему компонентных и топологических уравнений (3.1) и (3.2) можно рассматривать как окончательную ММС, которая и подлежит численному решению. Численное решение этой системы уравнений предполагает алгебраизацию дифференциальных уравнений, например, с помощью преобразования Лапласа или формул численного интегрирования. В программах анализа нелинейных объектов на макроуровне, как правило, применяются формулы численного интегрирования, примером которых может служить неявная формула Эйлера

где Vi— – значение переменной V на i-м шаге интегрирования; hn= tn– tn-1 – шаг интегрирования. Алгебраизация подразумевает предварительную дискретизацию независимой переменной t (вместо непрерывной переменной t получаем конечное множество значений tn), она заключается в представлении ММС в виде системы уравнений
с неизвестными Vn и Zn, где использовано обозначение Z = dV/dt. Эту систему алгебраических уравнений, в общем случае нелинейных, необходимо решать на каждом шаге численного интегрирования исходных дифференциальных уравнений.
Однако порядок этой системы довольно высок и примерно равен 2α+γ, где α – число ветвей эквивалентной схемы (каждая ветвь дает две неизвестные величины – фазовые переменные типа потока и типа потенциала, за исключением ветвей внешних источников, у каждой из которых неизвестна лишь одна фазовая переменная), γ – число элементов в векторе производных. Чтобы снизить порядок системы уравнений и тем самым повысить вычислительную эффективность ММС, желательно выполнить предварительное преобразование модели (в символическом виде) перед ее многошаговым численным решением. Предварительное преобразование сводится к исключению из системы части неизвестных и соответствующего числа уравнений. Оставшиеся неизвестные называют базисными. В зависимости от набора базисных неизвестных различают несколько методов формирования ММС.
Согласно методу переменных состояния (более полное название метода – метод переменных, характеризующих состояние), вектор базисных переменных W состоит из переменных состояния. Этот вектор включает неизбыточное множество переменных, характеризующих накопленную в системе энергию. Например, такими переменными могут быть скорости тел (кинетическая энергия определяется скоростью, так как равна Ми 2 /2), емкостные напряжения, индуктивные токи и т.п. Очевидно, что число уравнений не превышает γ. Кроме того, итоговая форма ММС оказывается приближенной к явной форме представления системы дифференциальных уравнений, т.е. к форме, в которой вектор dW/dt явно выражен через вектор W, что упрощает дальнейшее применение явных методов численного интегрирования. Метод реализуется путем особого выбора системы хорд и ветвей дерева при формировании топологических уравнений. Поскольку явные методы численного интегрирования дифференциальных уравнений не нашли широкого применения в программах анализа, то метод переменных состояния также теряет актуальность и его применение оказывается довольно редким.
В классическом варианте узлового метода в качестве базисных переменных используются узловые потенциалы (т.е. скорости тел относительно инерциальной системы отсчета, абсолютные температуры, перепады давления между моделируемой и внешней средой, электрические потенциалы относительно базового узла). Число узловых потенциалов и соответственно уравнений в ММС оказывается равным β-1, где β – число узлов в эквивалентной схеме. Обычно β заметно меньше α и, следовательно, порядок системы уравнений в ММС снижен более чем в два раза по сравнению с порядком исходной системы.
Однако классический вариант узлового метода имеет ограничения на применение и потому в современных программах анализа наибольшее распространение получил модифицированный узловой метод.
Узловой метод. Матрицу контуров и сечений М в узловом методе формируют следующим образом. Выбирают базовый узел эквивалентной схемы и каждый из остальных узлов соединяют с базовым фиктивной ветвью. Именно фиктивные ветви принимают в качестве ветвей дерева, а все реальные ветви оказываются в числе хорд. Поскольку токи фиктивных ветвей равны нулю, а вектор напряжений фиктивных ветвей есть вектор узловых потенциалов φ, то уравнения (3.13) и (3.14) принимают вид
U + Mφ = 0 (3.16)
M T I = 0 (3.17)
где U и I- векторы напряжений и токов реальных ветвей.
Компонентные уравнения алгебраизуются с помощью одной из формул численного интегрирования, линеаризуются с помощью разложения в ряд Тейлора с сохранением только линейных членов, и их представляют в виде
где Gn – диагональная матрица проводимостей, рассчитанная в точке tn; An – вектор, зависящий от значений фазовых переменных на предшествующих шагах интегрирования и потому уже известный к моменту времени tn. Каждая ветвь (за исключением идеальных источников напряжения) имеет проводимость, которая занимает одну из диагональных клеток матрицы проводимостей. Окончательно ММС получаем, подставляя (3.18) и затем (3.16) в (3.17):
M T In=M T (GnUn + An) =-M T GnMφn +M T An = 0
где Яn=М Т GnM – матрица Якоби, Вn = М Т Аn – вектор правых частей. Отметим, что матрица М имеет размер равен α×(β-1), матрица Gn –α×α, а матрица Якоби имеет размер – (β-1)×(β-1).
Система (3.19) является системой линейных алгебраических уравнений, полученной в результате дискретизации независимой переменной, алгебраизации дифференциальных уравнений и линеаризации алгебраических уравнений. Алгебраизация приводит к необходимости пошагового вычислительного процесса интегрирования, линеаризация – к выполнению итерационного вычислительного процесса на каждом шаге интегрирования.
Рассмотрим, каким образом определяются проводимости ветвей.
Для резистивных ветвей проводимость – величина, обратная сопротивлению R.
При использовании неявного метода Эйлера проводимость емкостной ветви получается из ее компонентного уравнения следующим образом.
На п-мшаге интегрирования

проводимость  и при С = const получаем
и при С = const получаем
при этом в вектор правых частей входит элемент 
Проводимость индуктивной ветви можно найти аналогично:
Аналогично определяют проводимости и при использовании других разностных формул численного интегрирования, общий вид которых

где μn зависит от шага интегрирования, ηn от значений вектора U на предыдущих шагах.
Классический вариант узлового метода имеет ограничения на применение. Так, недопустимы идеальные (с бесконечной проводимостью) источники напряжения, зависимые источники, аргументами которых являются токи, а также индуктивности, поскольку в классическом варианте токи не входят в число базисных переменных. Устранить эти ограничения довольно просто – нужно расширить совокупность базисных координат, включив в нее токи-аргументы зависимых источников, а также токи ветвей индуктивных и источников напряжения. Полученный вариант метода называют модифицированным узловым методом.
Согласно модифицированному узловому методу, в дерево при построении матрицы М включают ветви источников напряжения и затем фиктивные ветви. В результате матрица М принимает вид (табл. 3.2), где введены обозначения: UИCT(I) – источники напряжения, зависящие от тока; Е(t) – независимые источники напряжения; IИСТ(I) – источники тока, зависящие от тока; L – индуктивные ветви; Mij— – подматрица контуров хорд группы i и сечений фиктивных ветвей группы j.
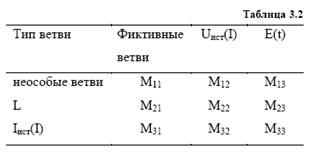
Те же обозначения UИCT, I, E, IИСТ будем использовать и для соответствующих векторов напряжений и токов. Назовем ветви, токи которых являются аргументами в выражениях для зависимых источников, т.е. входят в вектор I, особыми ветвями. Остальные ветви (за исключением индуктивных) – неособые. Введем также обозначения: IL – вектор индуктивных токов; Ix и Ux. – векторы токов и напряжений неособых ветвей; Gx, GL, GI– диагональные матрицы проводимостей ветвей неособых, индуктивных, особых.
Уравнение закона токов Кирхгофа (3.17) для фиктивных ветвей имеет вид

Исключим вектор IХ с помощью компонентного уравнения (3.18), а вектор IИСТ с помощью очевидного уравнения
IИСТ=KI
где  – матрица передаточных коэффициентов источников тока. Используем также выражение (3.16), принимающее вид
– матрица передаточных коэффициентов источников тока. Используем также выражение (3.16), принимающее вид

Получаем систему из трёх матричных уравнений с неизвестными векторами φ,I, IL:
 ; (3.20)
; (3.20)
 ; (3.21)
; (3.21)
 , (3.22)
, (3.22)
где обозначено  . Эта система и является итоговой ММ в узловом модифицированном методе.
. Эта система и является итоговой ММ в узловом модифицированном методе.
Замечания:
1. Вектор индуктивных токов нельзя исключить из итоговой системы уравнений, так как его значения входят в вектор AL на последующих шагах численного интегрирования.
2. Источники тока, зависящие от напряжений, относятся к неособым ветвям, их проводимости  входят в матрицу Gx, которая при этом может иметь недиагональный вид.
входят в матрицу Gx, которая при этом может иметь недиагональный вид.
3. Источники напряжения, зависящие от напряжений, в приведенных выше выражениях не учитываются, при их наличии нужно в матрице М выделить столбец для этих ветвей, что приводит к появлению дополнительных слагаемых в правых частях уравнений (3.19) – (3.21).
Дата добавления: 2017-03-29 ; просмотров: 907 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
http://vunivere.ru/work10360
http://helpiks.org/9-6741.html