Задачи с начальными условиями для систем обыкновенных дифференциальных уравнений
Рассмотрим задачу Коши для системы обыкновенных дифференциальных уравнений $$ \begin
Используя векторные обозначения, задачу (1), (2) можно записать как задачу Коши $$ \begin
Численные методы решения задачи Коши
Существует большое количество методов численного решения задачи (3), (4). Вначале рассмотрим простейший явный метод Эйлера и его программную реализацию. Затем будут представлены методы Рунге—Кутта и многошаговые методы.
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
Идея численных методов решения задачи (3), (4) состоит из четырех частей:
1. Вводится расчетная сетка по переменной \( t \) (время) из \( N_t + 1 \) точки \( t_0 \), \( t_1 \), \( \ldots \), \( t_
2. Предполагаем, что дифференциальное уравнение выполнено в узлах сетки.
3. Аппроксимируем производные конечными разностями.
4. Формулируем алгоритм, который вычисляет новые значения \( \pmb
Явный метод Эйлера
Проиллюстрируем указанные шаги. Для начала введем расчетную сетку. Очень часто сетка является равномерной, т.е. имеет одинаковое расстояние между узлами \( t_n \) и \( t_
Затем, предполагаем, что уравнение выполнено в узлах сетки, т.е.: $$ \pmb^\prime (t_n) = \pmb
Заменяем производные конечными разностями. С этой целью, нам нужно знать конкретные формулы, как производные могут быть аппроксимированы конечными разностями. Простейший подход заключается в использовании определения производной: $$ \pmb^\prime(t) = \lim_ <\tau \to 0>\frac<\pmb(t+\tau) — \pmb(t)><\tau>. $$
В произвольном узле сетки \( t_n \) это определение можно переписать в виде: $$ \begin
Четвертый шаг заключается в получении численного алгоритма. Из (5) следует, что мы должны знать значение \( y^n \) для того, чтобы решить уравнение (5) относительно \( y^
При условии, что у нас известно начальное значение \( \pmb
Программная реализация явного метода Эйлера
Выражение (6) может быть как скалярным так и векторным уравнением. И в скалярном и в векторном случае на языке Python его можно реализовать следующим образом
При решении системы (векторный случай), u[n] — одномерный массив numpy длины \( m+1 \) (\( m \) — размерность задачи), а функция F должна возвращать numpy -массив размерности \( m+1 \), t[n] — значение в момент времени \( t_n \).
Таким образом численное решение на отрезке \( [0, T] \) должно быть представлено двумерным массивом, инициализируемым нулями u = np.zeros((N_t+1, m+1)) . Первый индекс соответствует временному слою, а второй компоненте вектора решения на соответствующем временном слое. Использование только одного индекса, u[n] или, что то же самое, u[n, :] , соответствует всем компонентам вектора решения.
Функция euler решения системы уравнений реализована в файле euler.py:
Строка F_ = lambda . требует пояснений. Для пользователя, решающего систему ОДУ, удобно задавать функцию правой части в виде списка компонент. Можно, конечно, требовать чтобы пользователь возвращал из функции массив numpy , но очень легко осуществлять преобразование в самой функции решателе. Чтобы быть уверенным, что результат F будет нужным массивом, который можно использовать в векторных вычислениях, мы вводим новую функцию F_ , которая вызывает пользовательскую функцию F «прогоняет» результат через функцию assaray модуля numpy .
Неявный метод Эйлера
При построении неявного метода Эйлера значение функции \( F \) берется на новом временном слое, т.е. для решении задачи (5) используется следующий метод: $$ \begin
Таким образом для нахождения приближенного значения искомой функции на новом временном слое \( t_
Для решения уравнения (8) можно использовать, например, метод Ньютона.
Программная реализация неявного метода Эйлера
Функция backward_euler решения системы уравнений реализована в файле euler.py:
Отметим, что для нахождения значения u[n+1] используется функция fsolve модуля optimize библиотеки scipy . В качестве начального приближения для решения нелинейного уравнения используется значение искомой функции с предыдущего слоя u[n] .
Методы Рунге—Кутта
Одношаговый метод Рунге—Кутта в общем виде записывается следующим образом: $$ \begin
Одним из наиболее распространенных является явный метод Рунге-Кутта четвертого порядка: $$ \begin
Многошаговые методы
В методах Рунге—Кутта в вычислениях участвуют значения приближенного решения только в двух соседних узлах \( \pmb
Различные варианты многошаговых методов (методы Адамса) решения задачи с начальными условиями для систем обыкновенных дифференциальных уравнений могут быть получены на основе использования квадратурных формул для правой части равенства $$ \begin
Для получения неявного многошагового метода используем для подынтегральной функции интерполяционную формулу по значениям функции \( \pmb
Для интерполяционного метода Адамса (15) наивысший порядок аппроксимации равен \( m+1 \).
Для построения явных многошаговых методов можно использовать процедуру экстраполяции подынтегральной функции в правой части (14). В этом случае приближение осуществляется по значениям \( \pmb
Для экстраполяционного метода Адамса (16) погрешность аппроксимации имеет \( m \)-ый порядок.
На основе методов Адамса строятся и схемы предиктор–корректор. На этапе предиктор используется явный метод Адамса, на этапе корректора — аналог неявного метода Адамса. Например, при использовании методов третьего порядка аппроксимации в соответствии с (18) для предсказания решения положим $$ \frac<\pmb
Жесткие системы ОДУ
При численном решении задачи Коши для систем обыкновенных дифференциальных уравнений (3), (4) могут возникнуть дополнительные трудности, порожденные жесткостью системы. Локальные особенности поведения решения в точке \( u = w \) передаются линейной системой $$ \begin
Пусть \( \lambda_i(t) \), \( i = 1, 2, \ldots, m \) — собственные числа матрицы $$ \begin
Для численное решения жестких задач используются вычислительные алгоритмы, которые имеют повышенный запас устойчивости. Необходимо ориентироваться на использование \( A \)-устойчивых или \( A(\alpha) \)-устойчивых методов.
Метод называется \( A \)-устойчивым, если при решении задачи Коши для системы (3) область его устойчивости содержит угол $$ \begin
Коши для системы обыкновенных дифференциальных уравнений
Данко П. Е., Попов А. Г., Кожевникова Т. Я. Высшая математика в упражнениях и задачах…
Часть II. Глава IV. Обыкновенные дифференциальные уравнения
§ 1. Дифференциальные уравнения первого порядка
1. Основные понятия. Дифференциальным уравнением называется уравнение, связывающее независимые переменные, их функцию и производные (или дифференциалы) этой функции. Если независимая переменная одна, то уравнение называется обыкновенным; если же независимых переменных две или больше, то уравнение называется дифференциальным уравнением в частных производных.
Наивысший порядок производной, входящей в уравнение, называется порядком дифференциального уравнения. Например:
1) х²у’ + 5xy = у² – обыкновенное дифференциальное уравнение первого порядка;
2)  – обыкновенное дифференциальное уравнение второго порядка;
– обыкновенное дифференциальное уравнение второго порядка;
3) y’³ + y»y»’ = х – обыкновенное дифференциальное уравнение третьего порядка;
4) F (х, у, у’, у») = 0 – общий вид обыкновенного дифференциального уравнения второго порядка;
5)  – уравнение в частных производных первого порядка.
– уравнение в частных производных первого порядка.
В этом параграфе рассматриваются обыкновенные дифференциальные уравнения первого порядка, т. е. уравнения вида F (х, у, у’) = 0 или (в разрешенном относительно у’ виде) y’ = f(х, у).
Решением дифференциального уравнения называется такая дифференцируемая функция у = φ (x), которая при подстановке в уравнение вместо неизвестной функции обращает его в тождество. Процесс нахождения решения дифференциального уравнения называется интегрированием дифференциального уравнения.
Общим решением дифференциального уравнения первого порядка у’ = f(x, у) в области D называется функция у = φ(x, C), обладающая следующими свойствами: 1) она является решением данного уравнения при любых значениях произвольной постоянной С, принадлежащих некоторому множеству; 2) для любого начального условия у(х0) = у0 такого, что (x0; y0) ∈ 0, существует единственное значение С = С0, при котором решение у = φ(x, C0) удовлетворяет заданному начальному условию.
Всякое решение у = φ(x, C0), получающееся из общего решения у = φ (x, C) при конкретном значении С = С0, называется частным решением.
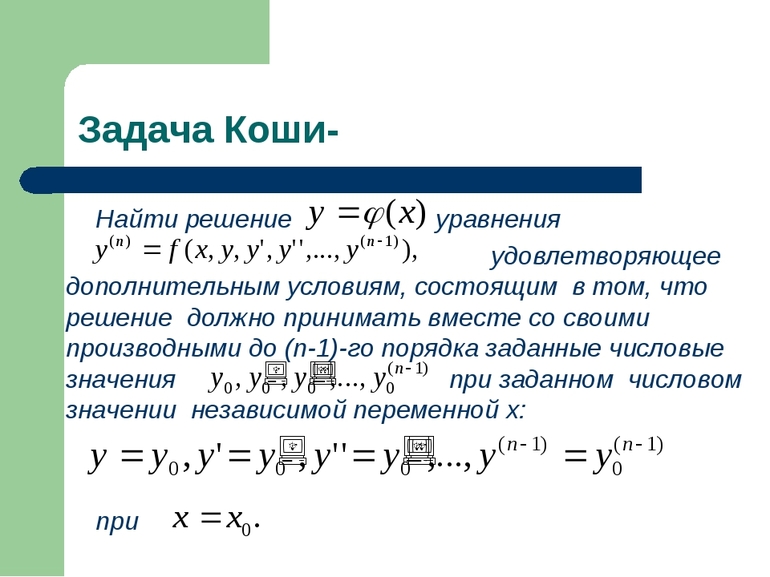
Задача, в которой требуется найти частное решение уравнения y’ = f(х, у) удовлетворяющее начальному условию у(х0) = y0, называется задачей Коши.
Построенный на плоскости хОу график всякого решения у = φ(х) дифференциального уравнения называется интегральной кривой этого уравнения. Таким образом, общему решению у = φ(х, С) на плоскости хОу соответствует семейство интегральных кривых, зависящее от одного параметра – произвольной постоянной С, а частному решению, удовлетворяющему начальному условию y(x0) = y0, – кривая этого семейства, проходящая через заданную точку М0(x0; у0).
Если функция f(х, у) непрерывна и имеет непрерывную производную  в области D, то решение дифференциального уравнения у’= f (х, у) при начальном условии у(х0) = у0 существует и единственно, т. е. через точку (x0; y0) проходит единственная интегральная кривая данного уравнения (теорема Коши).
в области D, то решение дифференциального уравнения у’= f (х, у) при начальном условии у(х0) = у0 существует и единственно, т. е. через точку (x0; y0) проходит единственная интегральная кривая данного уравнения (теорема Коши).
Особым решением называется такое решение, во всех точках которого условие единственности не выполняется, т. е. в любой окрестности каждой точки (х; у) особого решения существуют по крайней мере две интегральные кривые, проходящие через эту точку.
Особые решения не получаются из общего решения дифференциального управления ни при каких значениях произвольной постоянной С (в том числе и при С = ± ∞).
Особым решением является огибающая семейства интегральных кривых (если она существует), т. е. линия, которая в каждой своей точке касается по меньшей мере одной интегральной кривой.
Например, общее решение уравнения  записывается в виде у = sin (х + С). Это семейство интегральных кривых имеет две огибающие: у = 1 и у = -1, которые и будут особыми решениями.
записывается в виде у = sin (х + С). Это семейство интегральных кривых имеет две огибающие: у = 1 и у = -1, которые и будут особыми решениями.
2. Дифференциальные уравнения с разделяющимися переменными. Дифференциальное уравнение вида
относится к типу уравнений с разделяющимися переменными. Если ни одна из функций f1(x), f2(y), φ1(x), φ2(y) не равна тождественно нулю, то в результате деления исходного уравнения на f2 (x) φ1 (y) оно приводится к виду

Почленное интегрирование последнего уравнения приводит к соотношению

которое и определяет (в неявной форме) решение исходного уравнения. (Решение дифференциального уравнения, выраженное в неявной форме, называют интегралом этого уравнения.)
507. Решить уравнение х(у²-4)dx + y dy = 0.
△ Разделив обе части уравнения на у² – 4 ≠ 0, имеем

x² + ln|у² – 4| = ln|C|, или у² – 4 = Сe -λ²
Это общее решение данного дифференциального уравнения.
Пусть теперь у² – 4 = 0, т. е. у = ± 2. Непосредственной подстановкой убеждаемся, что у = ±2 – решение исходного уравнения. Но оно не будет особым решением, так как его можно получить из общего решения при С = 0. ▲
508. Найти частный интеграл уравнения у’ cos х = у / ln у, удовлетворяющий начальному условию y(0) = l.
△ Полагая  , перепишем данное уравнение в виде
, перепишем данное уравнение в виде


Проинтегрируем обе части уравнения:
 , или
, или 
Используя начальное условие у = 1 при х = 0, находим С = 0. Окончательно получаем
 ▲
▲
509. Найти общий интеграл уравнения у’ = tg x tg y.
△ Полагая и разделяя переменные, приходим к уравнению ctg у dy = tg х dx. Интегрируя, имеем
 , или ln|sin у| = -ln|cos x| + ln С.
, или ln|sin у| = -ln|cos x| + ln С.
Отсюда находим sin y = C/cos x, или sin y / cos x = С (общий интеграл). ▲
510. Найти частное решение дифференциального уравнения (l + x²)dy + y dx = 0 при начальном условии у(1) = 1.
△ Преобразуем данное уравнение к виду  . Интегрируя, получим
. Интегрируя, получим
 , или ln |y| = – arctg x + С
, или ln |y| = – arctg x + С
Это и есть общий интеграл данного уравнения.
Теперь, используя начальное условие, найдем произвольную постоянную С; имеем ln 1 = — arctg 1 + С, т. е. С = π/4. Следовательно,
ln у = – arctg х + π/4,
откуда получаем искомое частное решение y = e π/4 – arctg x . ▲
Данко П. Е., Попов А. Г., Кожевникова Т. Я. Высшая математика в упражнениях и задачах… Ч. II. Стр. 117-119.
Задача Коши — методы и примеры решения дифференциальных уравнений

Принцип и понятие
Под задачей Коши для дифференциального уравнения понимают выражение вида: y’ = f (x, y) с начальным условием, соответствующим равенству: y (x0) = y0. По сути, это обозначает, что необходимо найти такое решение уравнения, которое проходит через заданную точку игрек и икс нулевое. Решением задачи называется функция, заданная на указанном интервале в окрестности точки икс нулевое, то есть: x Є (x0 — q, x0 + q).
Для проведения анализа функции должны выполняться следующие критерии:
Следует отметить, что решение Коши включает в себя и сам интервал икс нулевое плюс минус кью, фактически q-окрестность. Это обозначает, что одна и та же функция, задаваемая одной формулой, но рассматриваемая на разных интервалах, представляет два разных нахождения задачи Коши. Отсюда возникает вопрос, при каких же ответах существует решение Коши, а также когда оно будет единственным.
Существует теорема, гарантирующая единственность какого-то решения задачи. На самом деле возможность аналитического подхода Коши требует лишь главного условия, при котором функция f будет непрерывной в какой-то окрестности точки x0, y0. Но для доказательства единственности этого недостаточно. Для нормального случая необходимо следующее:
- Функция f (x, y) непрерывна в некоторой окрестности точки (x0, y0).
- Существует такая константа C, что для любых точек икс и игрек выполняется неравенство: |f (x, y) — f (x2, y2)| ⩽ C |y1 — y2|.
По игреку функция должна иметь обыкновенный рост, то есть не убыстряющийся (локальный подъём не превышать линейный). Если эти два условия выполняются, то решение Коши существует и оно будет единственным. Это значит, что тогда у точки икс нулевое найдётся такая окрестность, в которой существует решение и к тому же оно будет единственным.
А это обозначает, что любая другая функция в этой окрестности, удовлетворяющая уравнениям начальных условий, совпадает с той, существование которой утверждается. При этом на практике проверка условия на самом деле вещь не очень сложная, особенно если функция f (y) имеет в окрестности ограниченную производную.
Алгоритм нахождения
Пусть имеется функция у’ = 2 * √ |y| и условие что y (0) = 0. Необходимо её исследовать. Тут можно заметить, что в этом случае функция зависит только от игрека и условию не удовлетворяет. В окрестностях точки с координатами (0, 0) она не удовлетворяет условию, так как любая окрестность захватывает ноль, а у корня квадратного по игреку будет бесконечная производная.
Это приводит не к единственности получения результатов. Так, у уравнения есть два решения: y1 тождественный нулю; y2 равняется x2. Согласно условию, игрек стоит по модулю, точнее, можно сказать, что для отрицательных значений икс будет меньше ноля, а положительных — больше.
Главный же вопрос заключается в продолжаемости анализа. Доказывается возможность простым построением решения с использованием специальных условий. В итоге должна быть найдена окрестность в точке x0. То есть берётся уравнение и точка с начальными координатами, затем выясняется, что в окрестности выполнены условия теоремы и строится решение.
Затем исследуется другая точка и изучается структура её окрестности. Например, обнаруживается, что условия существования единственности выполняются. Согласно теореме, тогда можно будет строить решение, где в качестве начальной точки будет взята любая координата. Другими словами, получается более широкое решение. Поэтому возникает вопрос, насколько можно приблизить точность ответа. Практические примеры показывают, что иногда можно двигаться до бесконечности, а в некоторых случаях сделать не более трёх шагов.
Если есть два уравнения y’ = f (x, y); y (x0) = y0 имеющие два решения: y1 (x), x Є I1 (эX), y2 (x), x єI2 (єX0). Тогда можно утверждать, что игрек два будет продолжением решения y1 (x) если в I2 входит I1, а y2 (x) равняется y1 (x) для любого икс из интервала I1. Следует учесть, что в этом определении в качестве областей функции всегда рассматривается интервал.
В изучении исследуются и матричные функциональные системы, состоящие из нескольких переменных A (z 1, z 2, …, zn). При этом z являются вещественными, а элементы матрицы могут быть как вещественными, так и комплексными. Исходя из этого даётся определение того, что функция, описываемая матрицей, непрерывна тогда, когда все элементы непрерывны в точке или на некотором множестве.
При определении используют численные и векторные функции от аргумента: y = (x), где y — это столбец от набора игреков, а икс со штрихом — от набора иксов. Таким образом, обобщённым решением будет такое действие, которое не будет иметь нетривиального продолжения, то есть вторые интервалы содержать первые.
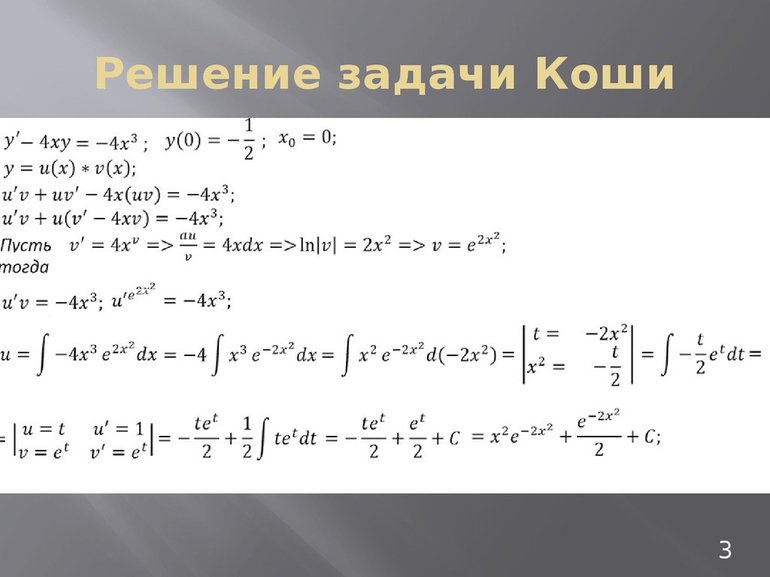
Примеры задач
На практических занятиях по высшей математике студентам предлагается для понимания курса выполнить ряд практических заданий. Существует типовой набор задач, научившись решать которые учащийся досконально разберётся в теме. Вот некоторые из них.
Первый пример. Имеется уравнение y’ = (2y / x lnx) + 1/x, для которого установлено начальное условие y (e) = 0. Необходимо найти решение, проходящее через точку e. Перед тем как приступить непосредственно к решению, необходимо отметить, что функция f (x, y) определённа всюду, за исключением прямых x = 0 и x = 1. Отсюда следует, что краевое решение не может быть вычислено на интервале от нуля до единицы.
В этом примере должен содержаться интервал, имеющий координату точки e по иксу. Он не может включать значения меньше единицы, так как необходимо, чтобы выполнялось заданное условием уравнение, которое в точке x = 1 теряет смысл, ведь в ней функция неопределённа. Установив это, можно переходить к анализу уравнения.
Заданное равенство является линейным — неоднородным уравнением первого порядка. Для решения нужно сначала рассмотреть левое соотношение: y’ = 2y / x * lnx. Добавив константу, уравнение можно переписать как y = c * e. Теперь необходимо взять интеграл исходя из первообразной формулы: ∫ 2 dx / (x *lnx).
После того как будет найдена постоянная, через общий интегральный метод с учётом условия определения функции, уравнение в окрестности точки e будет иметь решение вида: y = ln2x — lnx. Из полученного выражения можно сделать вывод, что функция будет определена для всех положительных иксов, но рассматривать её необходимо от единицы до плюс бесконечности. Это и будет максимальное непродолжаемое решение задачи: xЄ (1, + ∞).
Второй пример. Пусть имеется функция y’ = y / (1+x 2 ) с начальным условием: y = y (0). В задании нужно будет рассмотреть дифференциальную кривую уравнения, проходящего через точку y0. Нужно заметить, что функция f (x, y) в любой ограниченной области двумерной плоскости удовлетворяет условию регулярности для теоремы существования единственности. В задаче спрашивается, каким должен быть y0, если предел максимального решения при иксе, стремящемся к плюс бесконечности, равняется единице.

Учитывая, что в этой постановке заложено, чтобы решение было определённо до плюс бесконечности и то, что уравнение является однородно линейным, по общей формуле особое решение будет иметь вид: y = c * e arctgx . Игрек нулевое не может равняться нулю, ведь в ином случае решением уравнения будет тождественный ноль и заданное условие выполняться не будет. В итоге получится, что y = y0 * e arctgx . Это решение и является подходящей функцией для любого интервала.
Операционный метод
Решение задачи Коши (примеров) целесообразно выполнять экономичным методом интегрирования линейных выражений, содержащих постоянные коэффициенты. Суть способа сводится к решению алгебраических равенств или неравенств. Алгоритм исследования заключается в следующих действиях:
- Функции Y (p) и F (p) обозначают как изображения для y (x) и f (x).
- Используя главные преобразования Лапласа, обрабатывая изображения, получают (pn (Yp) — p n -1 y 0 — …- yn -1) + a 1 (p n -1 y (p) — p n -2 y 0 — … — yn -2) + … + anY (p) = F (p) или, A (p)Y (p)+B (p) = F (p), причём A (p) и B (p) являются многочленами.
- Найденное решение y (p) = (F (p) — B (p)) / A (p) и будет искомым y (x) для искомого y (p).
Например, пусть необходимо решить уравнение вида: x» + 4x = sin (2t), при x (0) = 1, x'(0) = -2. Классическим методом находить ответ довольно трудоёмко, поэтому имеет смысл для заданного уравнения использовать операционное исчисление. Для начала следует ввести замену Lx = x. Затем к обеим частям равенства применить преобразование Лапласа: Lx » + L 4 x = L * sin (2 t). Отсюда: Lx = x, Lx » = p 2 x — px (0) — x'(0). Функция Лапласа используется для преобразования вещественной переменной в выражение с комплексной переменной и наоборот. Это и позволяет использовать её при решениях дифференциальных уравнений и систем.
На следующем этапе нужно подставить исходные данные в равенство: Lx» = p 2 x — p + 2. Далее, следует выполнить преобразование и выразить неизвестную функцию. В итоге должно получиться выражение: X = (p 3 — 2 p 2 — 4 p — 6) / (p 2 + 4) 2 . Теперь можно найти оригинал изображений: x = L-1 <(p3 — 2p2 + 4p — 6) / (p2+4)2)>= cos (2t) — sin (2t) + (sin (2t) — 2tcos (2t))/8.
Использование онлайн-калькулятора
Часто решение задач по рассматриваемой теме связано с большими трудозатратами. Это касается времени и повышенного внимания. На практике не всегда получается правильно применить алгоритм и избежать ошибок. Поэтому имеет смысл для сложных заданий использовать онлайн-калькулятор. Решения на задачу Коши с его помощью доступны любому заинтересованному, имеющему доступ к интернету и устройство, поддерживающее работу веб-обозревателя.
В интернете существует довольно большое количество различных математических онлайн-решителей. В своём большинстве они бесплатны и ориентированы на работу даже с людьми, совершенно не разбирающимися в тематике. Поэтому они привлекательны не только как инструмент, предоставляющий быстрый и правильный ответ на поставленную задачу, но и как обучающие программы.
Всё дело в том, что на страницах сервисов, предлагающих такого рода услуги, содержится вся необходимая теоретическая информация. Кроме этого, они предлагают к рассмотрению типовые примеры с подробным объяснением решения. Из онлайн-калькуляторов, предоставляющих бесплатный доступ к своим услугам в русском сегменте интернета, можно отметить следующие:
- Math.semestr.
- Allcalc.
- Kontrolnaya-rabota.
- Matematikam.
- Primat.
Приведённые сервисы помогают без труда найти студентам решение дифференциального уравнения с заданными начальными условиями. Для этого в предлагаемую форму необходимо записать дифуравнение и через запятую начальные данные. Затем просто нажать интерактивную кнопку «Решить» и через некоторое время на экране дисплея отобразится ответ.

Для правильной записи уравнения существуют подсказки, так что разобраться, как работает сайт, сможет пользователь даже со слабой компьютерной подготовкой. Кроме этого, некоторые сервисы предлагают не просто ответ, а и пошаговое решение, к которому даётся комментарий. Решив несколько заданий, учащийся сможет разобраться в алгоритме и вычислять уравнения уже самостоятельно.
Следует отметить, что предложенные сервисы могут находить ответ для любой сложности математической задачи, например, вычисляя устойчивость математических моделей. Они также востребованы в инженерии и научных исследованиях, связанных с анализом функций. Для таких расчётов важны точность и время, что вполне могут обеспечить математические онлайн-сервисы.
http://an-site.ru/kr/ko.htm
http://nauka.club/matematika/zadach%D0%B0-koshi.html