Криволинейное движение материальной точки в теоретической механике
Содержание:
Криволинейное движение материальной точки:
В случае криволинейного движения по плоскости имеется два дифференциальных уравнения движения точки в декартовой системе координат, а в общем случае движения в пространстве— система трех дифференциальных уравнений. Дифференциальные уравнения криволинейного движения точки интегрируются сравнительно просто, если каждое из этих уравнений интегрируется независимо от других уравнений и при этом возможен один из трех рассмотренных случаев зависимости проекции равнодействующей силы от времени, координаты и скорости.
Рассмотрим примеры криволинейного движения точки в плоскости и в пространстве:
Пример 1. Материальная точка массой 
Определить уравнения движения точки и уравнение ее траектории в координатной форме.
Решение:
Пусть в момент  движущаяся точка имеет координаты
движущаяся точка имеет координаты  и
и  . Прикладываем к точке силу
. Прикладываем к точке силу  и составляем дифференциальные уравнения ее движения в проекциях на оси координат. Имеем:
и составляем дифференциальные уравнения ее движения в проекциях на оси координат. Имеем:
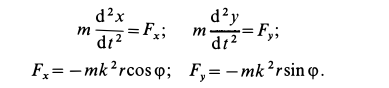

дифференциальные уравнения принимают форму

Для интегрирования этих уравнений можно применить подстановки
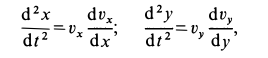
или интегрировать их как линейные дифференциальные уравнения с постоянными коэффициентами. Выполним интегрирование уравнений, используя подстановки. Имеем
Аналогично для  получаем
получаем
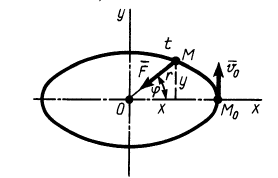
Рис. 11


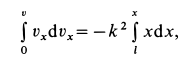
Эти дифференциальные уравнения интегрируем путем разделения переменных. Получаем
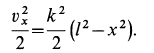
Выполняя интегрирование и подставляя пределы, имеем


Рис. 12
и уравнения движения точки принимают вид

Возводя в квадрат  и
и  , получаем уравнение траектории точки в координатной форме:
, получаем уравнение траектории точки в координатной форме:

Траекторией точки оказался эллипс с полуосями  и
и  .
.
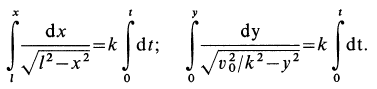
Пример 2. Материальная точка массой  (рис. 12) брошена с поверхности Земли в вертикальной плоскости со скоростью
(рис. 12) брошена с поверхности Земли в вертикальной плоскости со скоростью  под углом
под углом  к горизонту. Определить уравнения движения точки, если сила сопротивления воздуха, направленная против скорости, пропорциональна скорости и массе, т. е.
к горизонту. Определить уравнения движения точки, если сила сопротивления воздуха, направленная против скорости, пропорциональна скорости и массе, т. е.  , где
, где  — постоянный коэффициент пропорциональности.
— постоянный коэффициент пропорциональности.
Решение:
Задачу удобно решать в прямоугольной декартовой системе координат, начало которой находится в точке бросания, а ось  направлена по вертикали вверх. Оси
направлена по вертикали вверх. Оси  и
и  при этом расположатся в горизонтальной плоскости. Для определенности предположим, что начальная скорость
при этом расположатся в горизонтальной плоскости. Для определенности предположим, что начальная скорость  располагается в плоскости
располагается в плоскости  . Для составления дифференциальных уравнений движения точки возьмем такое ее положение в момент
. Для составления дифференциальных уравнений движения точки возьмем такое ее положение в момент  , когда координаты точки
, когда координаты точки  и их первые производные по времени положительны. На точку действуют две силы: сила тяжести
и их первые производные по времени положительны. На точку действуют две силы: сила тяжести  , направленная по вертикали вниз, и сила сопротивления
, направленная по вертикали вниз, и сила сопротивления  , направление которой противоположно направлению скорости
, направление которой противоположно направлению скорости  . Равнодействующая сила
. Равнодействующая сила
причем  .
.
Для проекций равнодействующей силы  на оси координат, считая, что в выбранном положении точки и положительных значениях
на оси координат, считая, что в выбранном положении точки и положительных значениях  , имеем
, имеем
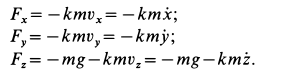
Знак минус у проекций силы сопротивления указывает на то, что их знаки противоположны знакам проекций скорости, принятым положительными.
Дифференциальные уравнения движения точки имеют вид

При сделанном выборе осей координат имеем следующие начальные условия:

Каждое дифференциальное уравнение системы в рассматриваемом случае можно интегрировать отдельно, независимо от других уравнений. После сокращения на т дифференциальные уравнения примут вид

Разделяя переменные и интегрируя каждое из уравнений системы, получаем:

После потенцирования имеем:

Подставляя в (г) начальные значения для  , получаем уравнения для определения произвольных постоянных
, получаем уравнения для определения произвольных постоянных  :
:

Постоянные интегрирования имеют следующие значения:

После подстановки постоянных интегрирования в (г) и замены проекций скорости на оси координат производными от координат по времени получаем

Разделяя в (г’) переменные и интегрируя каждое дифференциальное уравнение первого порядка, имеем

Подставляя в (д) начальные условия, получаем уравнения для определения постоянных интегрирования  :
:


Подставляя значения постоянных в (д), получаем искомые уравнения движения точки:
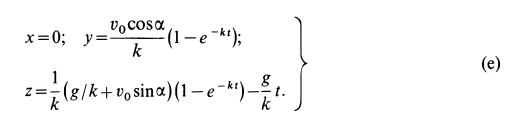
Проведем некоторые исследования движения точки. Из уравнений движения (е) путем предельного перехода при  , стремящемся к нулю, можно получить уравнения движения точки под действием только одной силы тяжести. Обозначая координаты точки в этом случае
, стремящемся к нулю, можно получить уравнения движения точки под действием только одной силы тяжести. Обозначая координаты точки в этом случае  , раскрываем неопределенности в уравнениях (е) по правилу Лопиталя. Для
, раскрываем неопределенности в уравнениях (е) по правилу Лопиталя. Для  получаем
получаем
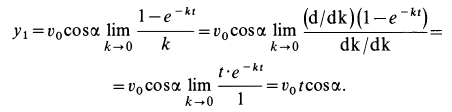
Прежде чем переходить к пределу в  , преобразуем его к виду
, преобразуем его к виду

Получаем следующие уравнения движения точки под действием одной силы тяжести:

Если из этих уравнений исключить время  , то получим уравнения траектории точки в координатной форме (рис. 12):
, то получим уравнения траектории точки в координатной форме (рис. 12):

Траекторией точки является парабола, расположенная в плоскости  .
.
Если в (ж) принять  , то
, то  при этом окажется горизонтальной дальностью
при этом окажется горизонтальной дальностью  , которая определяется по формуле
, которая определяется по формуле

Из (з) следует, что наибольшая горизонтальная дальность получается при угле бросания  :
:
При других углах бросания  одну и ту же дальность , как это следует из (з), можно получить бросая точку под углом
одну и ту же дальность , как это следует из (з), можно получить бросая точку под углом  к горизонту или под тем же углом
к горизонту или под тем же углом  к вертикали с той же самой скоростью
к вертикали с той же самой скоростью  .
.
Криволинейное движение точки
Как известно из кинематики, при движении материальной точки по криволинейной траектории ее ускорение  имеет два составляющих ускорения:
имеет два составляющих ускорения:  — касательное (тангенциальное) и
— касательное (тангенциальное) и  — — нормальное (центростремительное).
— — нормальное (центростремительное).
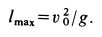
Из динамики уже известно, что ускорение  , приобретенное точкой, есть результат действия определенной системы сил. Равнодействующая
, приобретенное точкой, есть результат действия определенной системы сил. Равнодействующая  этой системы и ускорение
этой системы и ускорение  (рис. 248) находятся в зависимости, выражающей основной закон динамики точки:
(рис. 248) находятся в зависимости, выражающей основной закон динамики точки:

Если уравновесить силу  приложением к точке силы инерции
приложением к точке силы инерции  , а затем разложить ее на две составляющие
, а затем разложить ее на две составляющие  соответственно по нормали и по касательной, то эти составляющие будут находиться в зависимости от нормальных и касательных ускорений, определяемых такими векторными равенствами:
соответственно по нормали и по касательной, то эти составляющие будут находиться в зависимости от нормальных и касательных ускорений, определяемых такими векторными равенствами:

В задачах на криволинейное движение точки в основном рассматривается нормальная (центробежная) сила инерции 
Числовое значение нормальной (центробежной) силы инерции можно выражать следующими формулами:

Заменим здесь

Если материальная точка, рассматриваемая в задаче, связана с каким-либо вращающимся телом, то скорость точки удобнее выражать через угловую скорость тела  и тогда
и тогда

Если в последней формуле выразить массу точки через ее вес  , а угловую скорость — в об. мин
, а угловую скорость — в об. мин  то
то 
Здесь  поэтому формуле можно придать такой вид
поэтому формуле можно придать такой вид
 (4)
(4)
Эта формула дает приближенное значение центробежной силы инерции, но она очень удобна при решении многих задач.
Последовательность решения задач на криволинейное движение точки при помощи метода кинетостатики та же, что в предыдущем параграфе.
Задача №1
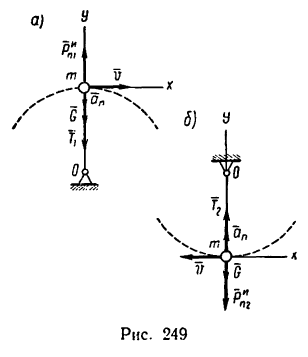
Шарик, масса которого m= 0,5 кг, привязки к нити длиной 0,7 м. Нить вместе с шариком вращается в вертикальной плоскости, затрачивая на один оборот 1 сек. Определить натяжение шнура в моменты высшего и низшего положения шарика, считая, что скорость остается постоянной при перемещении по всей длине окружности.
1. В соответствии с условием задачи считаем, что шарик движется равномерно по окружности, радиус которой равен длине нити (r=0,7 м). Следовательно, его скорость

Оставаясь численно неизменной, скорость точки непрерывно изменяет направление, значит точка имеет нормальное ускорение

2. Рассмотрим движущийся шарик в тот момент, когда он проходит через верхнюю точку траектории (рис. 249, а).
На шарик действуют две силы: его вес  и реакция нити
и реакция нити  равная ее натяжению. Заметим, что обе силы направлены в одну сторону — к точке О подвеса, так как вес всегда направлен вертикально вниз. Реакция гибкой связи всегда направлена вдоль нити от тела, которое удерживается нитью. Шарик, привязанный к нити и приведенный в движение, стремится согласно закону инерции двигаться равномерно и прямолинейно и поэтому он постоянно натягивает пить.
равная ее натяжению. Заметим, что обе силы направлены в одну сторону — к точке О подвеса, так как вес всегда направлен вертикально вниз. Реакция гибкой связи всегда направлена вдоль нити от тела, которое удерживается нитью. Шарик, привязанный к нити и приведенный в движение, стремится согласно закону инерции двигаться равномерно и прямолинейно и поэтому он постоянно натягивает пить.
3. Добавим к силам  силу инерции
силу инерции  направив ее в сторону, противоположную ускорению
направив ее в сторону, противоположную ускорению  Образовав таким образом уравновешенную систему сил, получим уравнение равновесия
Образовав таким образом уравновешенную систему сил, получим уравнение равновесия

4. Из уравнения разновесия находим  учитывая, что
учитывая, что 

Подставим в это уравнение числовые значения:

Таким образом, находясь в верхнем положении, двигающийся шарик натягивает пить силой 8,9 н, что соответствует 0,91 кГ.
0,91 кГ.
Отметим, что натяжение нити будет ослабевать при уменьшении скорости движения шарика. Следовательно, для того чтобы шарик при движении в вертикальной плоскости смог пройти верхнюю точку траектории с заданным радиусом кривизны р, он должен иметь в этой точке определенную скорость.
5. Рассмотрим теперь движущийся шарик в момент прохождения нм нижней точки траектории (рис. 249,6).
В этом положении на шарик действуют также две силы: вес  и реакция нити
и реакция нити  но в отличие от предыдущего случая эти силы, действуя вдоль одной прямой, направлены в противоположные стороны.
но в отличие от предыдущего случая эти силы, действуя вдоль одной прямой, направлены в противоположные стороны.
6. Добавим к силам  силу инерции
силу инерции  и составим уравнение равновесия:
и составим уравнение равновесия:

7. Находим 


Как видно, при прохождении через нижнюю точку траектории шарик создает наибольшее натяжение нити.
Задача №2
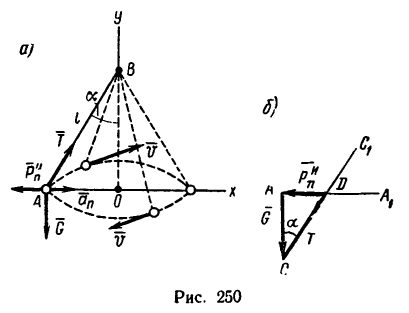
Шарик А, масса которого 2 кг, подвешен на нити длиной 60 см, закрепленной в точке В. Он равномерно двигается по окружности в горизонтальной плоскости так, что нить описывает коническую поверхность и образует с вертикалью угол а = 30°. Определить натяжение нити и скорость шарика.
Решение 1 — с применением метода проекций.
1. Если масса шарика m=2 кг, то его вес G = mg = 2* 9,81 =19,62 н.Кроме веса, на шарик действует натяжение (реакция  нити. Длина нити l= 60 см = 0,6 м.
нити. Длина нити l= 60 см = 0,6 м.
Изобразим двигающийся шарик с приложенными к нему силами G и  (рис. 250,а). Так как шарик
(рис. 250,а). Так как шарик
мерно, то он имеет только
6. Добавим к силам  силу инерции
силу инерции  и составим уравнение равновесия:
и составим уравнение равновесия:

7. Находим 


Как видно, при прохождении через нижнюю точку траектории шарик создает наибольшее натяжение нити.
Задача №3
Шарик А, масса которого 2 кг, подвешен на нити длиной 60 см, закрепленной в точке В. Он равномерно двигается по окружности в горизонтальной плоскости так, что нить описывает коническую поверхность и образует с вертикалью угол а = 30°. Определить натяжение нити и скорость шарика.
Решение 1 — с применением метода проекций.
1. Если масса шарика m=2 кг, то его вес G = mg =  =19,62 н
=19,62 н
Кроме веса, на шарик действует натяжение (реакция  нити. Длина нити
нити. Длина нити 

Изобразим двигающийся шарик с приложенными к нему силами  (рис. 250,а). Так как шарик мерно, то он имеет только
(рис. 250,а). Так как шарик мерно, то он имеет только
движется по окружности равно-нормальное ускорение , направленное по радиусу АО = r окружности. Применяя принцип Даламбера, для уравновешивания сил Т и G приложим к шарику нормальную (центробежную) силу инерции
, направленное по радиусу АО = r окружности. Применяя принцип Даламбера, для уравновешивания сил Т и G приложим к шарику нормальную (центробежную) силу инерции
Изображая на рис. 250 силу инерции, необходимо учитывать, что она прикладывается к шарику условно. В действительности, сила инерции, как известно, приложена к двигающему телу или к связи. В данном случае нить служит для шарика и двигающим телом (через нить шарик приводится в движение), и связью (нить одновременно и ограничивает движение шарика). Поэтому сила инерции приложена к нити и отклоняет ее су вертикали.
2. Совместив оси координат с прямыми AO и ВО и спроектировав силы на оси х и у, выведем уравнения равновесия:

3. Из уравнения (2)

4 Из уравнения (1)

Так как 
где  —искомая скорость шарика, а радиус окружности
—искомая скорость шарика, а радиус окружности 
Таким образом, натяжение нити составляет 22,7 н при скорости движения шарика 1,3 м/сек.
Решение 2—с применением графо-аналитического метода.
1. Этот вариант решения начинаем так же, как и предыдущий: изображаем шарик с действующими на него силами С = 19,62 н и искомой Т, а затем добавляем силу инерции  направленную противоположно вектору
направленную противоположно вектору  (см. рис. 250, о).
(см. рис. 250, о).
2. Силы  образуют уравновешенную систему, поэтому многоугольник, построенный из векторов этих сил, должен быть замкнутым. Построение силового многоугольника начинаем с изображения вектора
образуют уравновешенную систему, поэтому многоугольник, построенный из векторов этих сил, должен быть замкнутым. Построение силового многоугольника начинаем с изображения вектора  (рис. 250,6). Затем из точек С и A проводим соответственно линии
(рис. 250,6). Затем из точек С и A проводим соответственно линии параллельные направлениям сил
параллельные направлениям сил  (см. рис. 250,а). Прямые
(см. рис. 250,а). Прямые пересекаются в точке D и образуется векторный прямоугольный треугольник
пересекаются в точке D и образуется векторный прямоугольный треугольник  в котором
в котором 
3. Из прямоугольного треугольника ACD имеем: 
И, наконец, так же как и в первом решении, находим скорость движения шарика по окружности
Задача №4
Тонкий стержень AВ, центр тяжести которого расположен на его оси О, вращается с угловой скоростью n -3009 об, мин.
На сколько увеличится нагрузка на подшипник, в котором вращается стержень, если на одну из половинок стержня прикрепить массу m — 0,5 кг, на расстоянии р = 0,1 м от оси вращения (рис. 251,а).
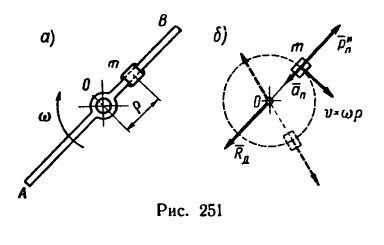
1. Стержень АВ без прикрепленной к нему массы т создает нагрузку на подшипник, равную его собственному весу. Причем, если стержень хорошо центрирован, т. е. его центр тяжести расположен точно на оси подшипника, то нагрузка при вращении не изменится — она также будет равна весу стержня и будет действовать на подшипник вертикально вниз.
2. Если к стержню, по условию задачи, прикрепить массу m, то эта масса (примем ее за материальную точку), двигаясь по окружности радиусом р = 0,1 м, начнет растягивать ту часть стержня, которая расположена между массой т и подшипником, силой, равной  Благодаря этому возникает дополнительная так называемая динамическая нагрузка на подшипник, уравновешиваемая его реакцией
Благодаря этому возникает дополнительная так называемая динамическая нагрузка на подшипник, уравновешиваемая его реакцией  (рис. 251,6).
(рис. 251,6).
3. Так как увеличение нагрузки равно возникшей силе инерции 
Подставим эти значения в формулу (3):
PJ| = 0,5 • 3142 • 0,1 =4929,8 н?«4,93 кн.
Таким образом, в результате прикрепления массы т нагрузка на подшипник увеличивается почти на 5 кн, что соответствует почти 
4. Применив формулу (4) и положив в ней 
 м, найдем силу инерции
м, найдем силу инерции  выраженную в кГ:
выраженную в кГ: 
Результат, получившийся в этой задаче, подтверждает необходимость тщательной балансировки вращающихся деталей машин. Несбалансированные детали при вращении создают огромные дополнительные динамические нагрузки, которые приводят к быстрому износу подшипников.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Геометрия масс
- Свойства внутренних сил системы
- Аксиомы классической механики
- Дифференциальные уравнения движения материальной точки
- Две основные задачи динамики точки
- Прямолинейное движение точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Криволинейное движение
В зависимости от формы траектории движение можно подразделять на прямолинейное и криволинейное. Чаще всего можно столкнуться с криволинейными движениями, когда траектория представлена в виде кривой. Примером такого вида движения является путь тела, брошенного под углом к горизонту, движение Земли вокруг Солнца, планет и так далее.
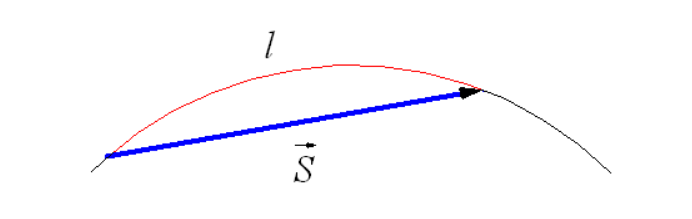
Рисунок 1 . Траектория и перемещение при криволинейном движении
Мгновенная скорость при криволинейном движении
Криволинейным движением называют движение, траектория которого представляет собой кривую линию. Если тело движется по криволинейной траектории, то вектор перемещения s → направлен по хорде, как показано на рисунке 1 , а l является длиной траектории. Направление мгновенной скорости движения тела идет по касательной в той же точке траектории, где в данный момент располагается движущийся объект, как показано на рисунке 2 .
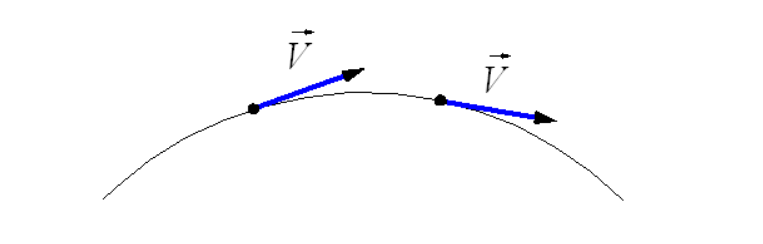
Рисунок 2 . Мгновенная скорость при криволинейном движении
Криволинейное движение материальной точки называют равномерным тогда, когда модуль скорости постоянный (движение по окружности), и равноускоренным при изменяющемся направлении и модуле скорости (движение брошенного тела).
Криволинейное движение всегда ускоренное. Это объясняется тем, что даже при неизмененном модуле скорости, а измененном направлении, всегда присутствует ускорение.
Для того чтобы исследовать криволинейное движение материальной точки, применяют два метода.
Путь разбивается на отдельные участки, на каждом из которых его можно считать прямолинейным, как показано на рисунке 3 .
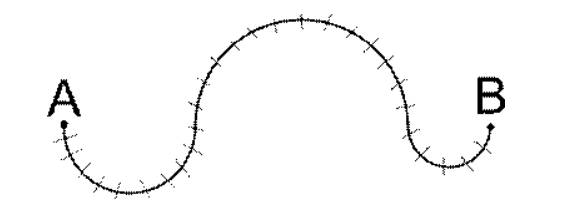
Рисунок 3 . Разбиение криволинейного движения на поступательные
Теперь для каждого участка можно применять закон прямолинейного движения. Такой принцип допускается.
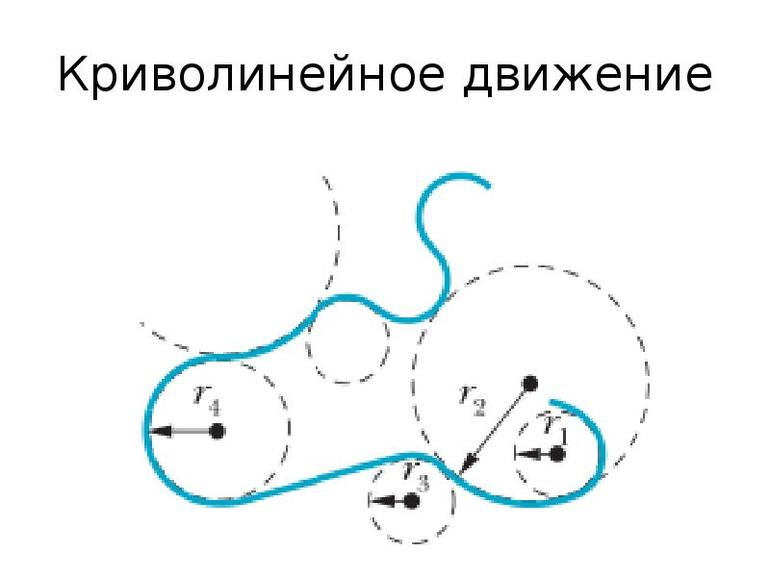
Разбиение на движения по дугам
Самым удобным методом решения считается представление пути в качестве совокупности нескольких движений по дугам окружностей, как показано на рисунке 4 . Количество разбиений будет намного меньше, чем в предыдущем методе, кроме того, движение по окружности уже является криволинейным.
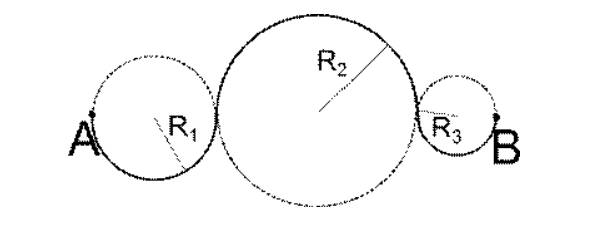
Рисунок 4 . Разбиение криволинейного движения на движения по дугам окружностей
Для записи криволинейного движения необходимо уметь описывать движение по окружности, произвольное движение представлять в виде совокупностей движений по дугам этих окружностей.
Исследование криволинейного движения включает в себя составление кинематического уравнения, которое описывает это движение и позволяет по имеющимся начальным условиям определить все характеристики движения.
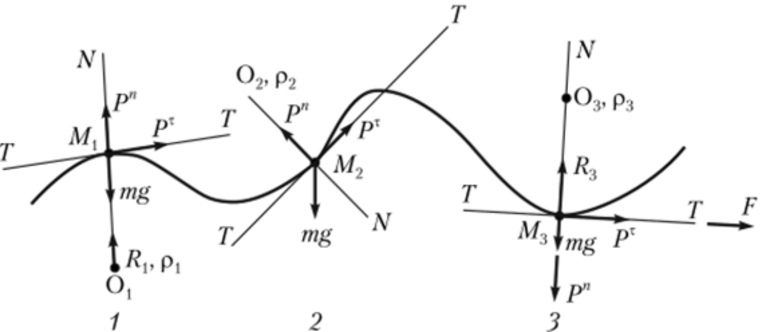
Дана материальная точка, движущаяся по кривой, как показано на рисунке 4 . Центры окружностей O 1 , O 2 , O 3 располагаются на одной прямой. Необходимо найти перемещение
s → и длину пути l во время движения из точки А в В .
Решение
По условию имеем, что центры окружности принадлежат одной прямой, отсюда:
s → = R 1 + 2 R 2 + R 3 .
Так как траектория движения – это сумма полуокружностей, то:
A B = π R 1 + R 2 + R 3 .
Ответ: s → = R 1 + 2 R 2 + R 3 , l
A B = π R 1 + R 2 + R 3 .
Дана зависимость пройденного телом пути от времени, представленная уравнением s ( t ) = A + B t + C t 2 + D t 3 ( C = 0 , 1 м / с 2 , D = 0 , 003 м / с 3 ) . Вычислить, через какой промежуток времени после начала движения ускорение тела будет равно 2 м / с 2
Криволинейное движение — общая характеристика, формулы и примеры
Общие сведения
В физике даётся вполне однозначное определение движению. Под ним понимают изменение положения физической точки в пространстве по отношению с другими объектами. Считается, что любое тело состоит из совокупности точек, перемещающихся одинаково по отношению друг к другу. Поэтому любой объект принято обозначать в виде элементарной точки.
Кинематика не изучает, почему движение таково, а рассматривает только путь перемещения. С точки зрения физики, криволинейное движение — это путь, пройденный материальной точкой по кривой траектории. Если же траектория прямая, то изменение положения называется прямолинейным.
Криволинейное движение — это всегда ускоренное перемещение. Оно может быть:
- Равномерным. В этом случае скорость перемещения по модулю остаётся постоянной на всём прошедшем расстоянии. Например, движение по окружности.
- Равноускоренным. Признаком такого движения является изменение скорости и направления. Например, брошенное тело под углом.
Основной характеристикой понятия является вектор перемещения. Обозначается он латинской буквой S со стрелочкой вверху. Направлен он всегда по хорде. Кроме вектора, передвижение по кривой линии определяется тангенциальным и нормальным ускорением.
В первом случае характеристика обозначает изменение величины скорости в единицу времени: at = lim Δv / Δt, где: v — начальная скорость в момент времени t0 + Δt. Тангенциальное ускорение может как совпадать по направлению со скоростью, так и быть ей противоположной.
Нормальным ускорением называют характеристику, перпендикулярную направлению скорости: an = V 2 / r, где: r — радиус окружности. Оно всегда совпадает с радиусом кривизны пути. Подвидом такого ускорения является центростремительная сила. Проявляется она при равномерном перемещении по окружности.
Таким образом, если движение является криволинейным, то вектора скорости и ускорения не лежат на одной прямой. Из простых примеров криволинейного движения можно выделить: течение воды в реке, перелёт на самолёте, катание на колесе обозрения.
Центростремительное ускорение
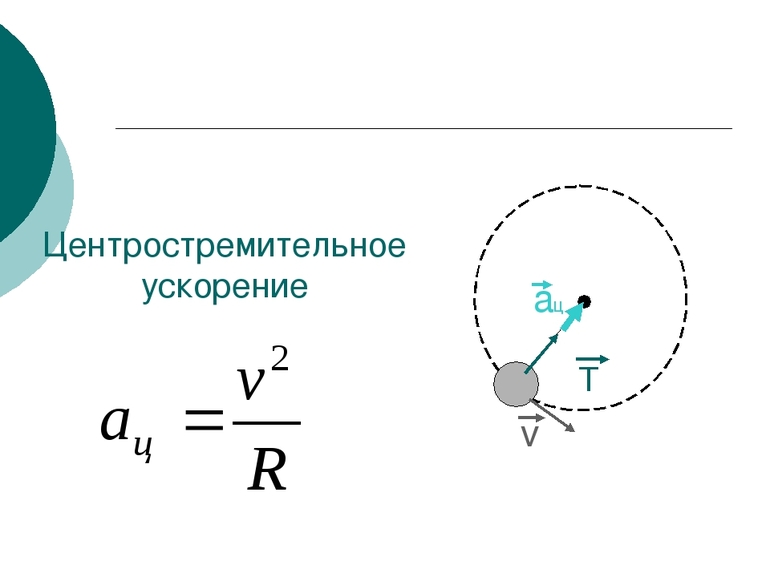
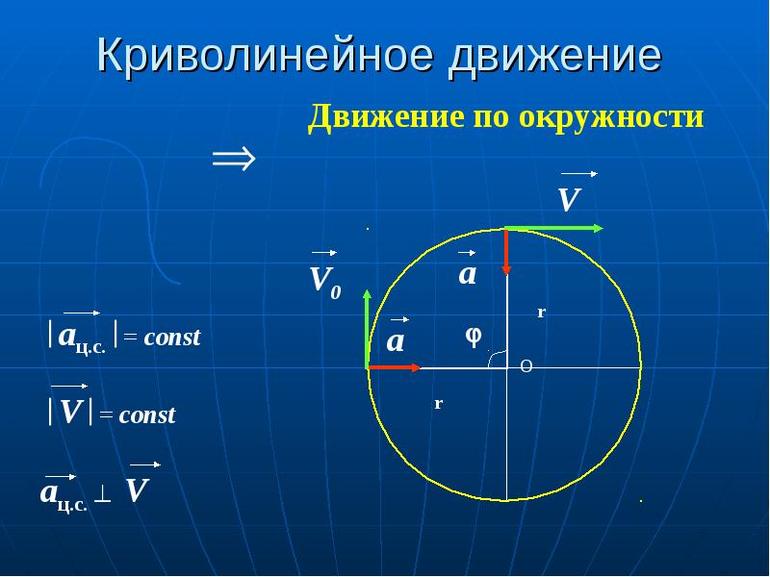
Если движение равномерное, но происходит оно по кривой, всё равно будет фиксироваться ускорение точки. Это происходит из-за того, что ускорение определяется как изменение скорости к промежутку времени. Поэтому если точка движется равномерно, то это значит, что модуль скорости остаётся одинаковым, но направление вектора изменяется. То есть будет справедливо записать: v = v0, но v ≠ v0. Можно сделать вывод, что изменение скорости существует, если Δv ≠ 0, при этом ускорение тоже не равно нулю: a ≠ 0.
Рассмотрим самый простой вид криволинейного перемещения. Существует история, что ещё во времена Аристотеля древние греки считали окружность идеальной линией. Из-за этого исторического факта астрономам приходилось объяснять движение планет, как комбинацию перемещений космических тел по окружности.
Можно представить тело, изменяющее своё положение по окружности. Траектория перемещения в декартовой системе координат будет выглядеть в виде полусферы. Пусть за её центр будет принята точка O. Тело движется равномерно. В какой-то момент времени его скорость будет V0. Её вектор направлен по касательной и совпадает по направлению с перемещением тела. Через некоторое время объект переместится в другую точку. Его скорость по-прежнему останется направленной по касательной, при этом модуль не изменится. То есть V = V0, но вектора их неравны: V ≠ V0.
Пусть стоит задача — найти равномерное движение по окружности. Иными словами, определить направление вектора и вычислить его модуль. В первую очередь необходимо узнать, куда же направлен вектор ускорения. Чтобы ответить на этот вопрос, нужно опираться на исходную формулу: a = Δv / Δt. Отсюда можно сделать вывод, что куда будет направлен вектор V, туда будет направлено и ускорение a.
Для наглядности можно построить вектор изменения скорости частицы, движущейся по рассматриваемой траектории. Чтобы построить график, описывающий ситуацию, нужно перенести V0 параллельно вектору V к его началу. Соединив два свободных конца перпендикуляром, получится треугольник. По правилу вычитания векторов можно получить вектор изменения скорости: Δv = V — V0. Направлен он будет сверху вниз.
Так как V0 направлен по касательной перпендикулярно радиусу, при этом угол треугольника при основании стремится к нулю, можно утверждать, что Δv перпендикулярен V. Значит, и вектор ускорения перпендикулярен V. Отсюда следует, что вектор ускорения направлен к центру окружности, поэтому его и называют центростремительным ускорением.
Движение по произвольной кривой
Рассмотрим простейший случай равномерного перемещения. Можно представить ситуацию, что если руль автомобиля держать неподвижно, то он будет ехать по прямой или по окружности. В реальной ситуации при езде всё время приходится поворачивать руль автомобиля, то есть в каждый момент времени происходит перемещение по окружности. При этом с каждым поворотом колеса управления радиус окружности изменяется. В данный момент времени он всегда совпадает с траекторией движения и называется радиусом кривизны траектории.
На графике движения можно отметить несколько точек. В одной из них скорость будет равняться V1. Немного дальше пройденное расстояние изменится, но скорость останется той же. Поменяется и направление V2. Через определённое время скорость будет равняться V3. Это движение равномерное.
Относительно точки V1 можно построить касающуюся её окружность с центром r1. По аналогии движения за рулём, это то же самое, что в рассматриваемой точке зафиксировать поворот управления на постоянный угол. Для V2 центр радиуса находится в точке r2, а V3 в r3.
В любом из этих трёх случаев происходит движение по окружности. То есть криволинейное движение произвольной формы — это перемещение по окружности любого радиуса. Если же радиус изменяется, то в любой момент меняется и центростремительное ускорение. Но при этом направление всегда совпадает с радиусом. Самое большое ускорение будет в том месте, где радиус самый маленький, и наоборот. Таким образом можно утверждать, что всякий раз ускорение будет перпендикулярно скорости при равномерном движении.
Кроме центростремительного ускорения, важными характеристиками, описывающими движение, являются следующие величины:
- Период. Показывает, за сколько времени точка совершит один оборот: T = t /n. Где t — время, за которое происходит определённое число оборотов, равное n.
- Частота. Определяет, сколько оборотов совершенно за единицу времени: λ = n / t.
- Угловая скорость. Является отношением угла поворота радиуса ко времени, за который произошёл поворот: W = φ / Δt = 2 * p / T = V / r.
Это основные формулы для криволинейного движения, использующиеся при решении задач. Кроме того, в заданиях используется связь между линейной и угловой скоростями: v = w * r, а также формула полного ускорения: a = at + an.
Решение простых задач
Виды движения изучаются на уроках физики в седьмом классе средней школы. На них ученикам объясняют понятия поступательного и равномерного движения, даются необходимые уравнения. Решение задач на уроках необходимо для закрепления пройденного материала и реального понимания ситуаций, при которых используются знания о видах перемещения.
Вот некоторые типы заданий, часто встречающиеся в различных вариантах у учащихся при сдаче ими тестов или написании контрольных работ:
- Линейная скорость точек рабочей поверхности наждачного круга диаметром 300 мм не должна превышать 35 метров в секунду. Допустима ли посадка круга на вал электродвигателя, совершающего обращение со скоростью 1400 оборотов в минуту? Согласно условию, необходимо найти, как связаны между собой V1 c Vmax. То есть линейную скорость и частоту вращения. Для расчёта необходимо использовать формулу связи скоростей: v = w * r. Так как поверхность абразива плоская, то радиус его будет равняться: r = d / 2. Подставив все исходные данные, можно записать: v = 2 * p * n / 2 = p * n * d = 3,14 * 1400 * 1/60с * 0,3 м = 22 м/с. Следовательно, из полученного значения можно сделать вывод, что посадка допустима.
- Какова линейная скорость точек земной поверхности на широте 46,5 0 при суточном вращении? Радиус Земли принять равным 6400 км. Другими словами, нужно выяснить линейную скорость. Широта рассчитывается вдоль меридиана и, по сути, это угол, измеряемый между двумя точками. Одна из них находится на экваторе, а другая — в указанном месте. Между радиусами, проведёнными из этих точек, угол составляет φ. Решить поставленную задачу можно, используя формулы: v = w * r и w = 2 * p / T. Следует учесть, что радиус, соответствующий 46,5 0, будет меньше радиуса Земли. Для того чтобы найти нужное значение, необходимо построить виртуальный треугольник и, используя тригонометрические формулы, записать, что cos φ = r / R. Учитывая, что направлена мгновенная скорость при криволинейном движении к центру, формула будет иметь вид: V = (2 * p / T) * R * cos φ = (6,28 * 6400 * 10 3 * cos 46,5 0 ) / 24 * 3,600 c = 465 * 0,69 м/с = 320 м/с.
Таким образом решать задачи на нахождение различных параметров при криволинейном движении без учёта его вызвавшей причины несложно. При этом следует правильно определить тип движения и знать основные формулы.
Пример сложного уровня
В большей мере такого уровня задачи являются поучительными, так как они используются для реальных случаев. Например, при расчётах работы различных технических установок. Вот одна из них.
Пусть движение от шкива один к шкиву четыре передаётся при помощи двух временных передач. Найти частоту вращения в оборотах в минуту и угловую скорость шкива четыре, если шкив один делает 1200 об/мин, а радиусы шкивов: R1 — 8 см, R2 — 32 см, R3 — 11 см, R4 — 55 см, при этом они жёстко укреплены на одном валу. Передающие ремни принять идеальными.
Для решения этой задачи нужно вначале определить направление вращения. Из условия задачи следует, что первый шкив будет вращаться в другую сторону по сравнению с остальными тремя. Для того чтобы найти угловую скорость последнего ролика, нужно будет последовательно определить параметры предшествующих ему шкивов.
Линейная скорость точек движения на ролике первого и второго шкива одинакова. Это следует из того, что ремни идеальные, не проскакивают и не растягиваются. Таким образом будет справедливо записать: V1 = V2. Так как w1 * r1 = w2 * r2, можно составить отношение: r1 / r2 = w1 / w2 или r1 / r2 = 2 * p * n2 / 2 * p * n1. То есть отношение примет вид: r1 / r2 = n2 / n1.
Так как третий шкив закреплён жёстко на валу со вторым, то образованную систему можно считать одним твёрдым телом. Применительно к нему можно говорить об общей угловой скорости или одинаковой частоте вращения. Получается, что n3 = n2. Тогда можно записать: n3 = n1 = r1 / r2.
На следующем шаге необходимо определить линейную скорость на четвёртом ролике. Из условия известно, что V3 = V4, так как их соединение идеальное. Это значит, что можно связать скорости третьего и четвёртого шкива с частотами: V4 = 2 *p * n4 * r4; V3 = 2 * p * n3. Из полученного равенства нужно выразить n4. Оно будет равняться: n4 = n3 * r3 / r4. В эту формулу необходимо подставить n3 и получить итоговую формулу: n4 = n1 * (r1 * r3) / (r2 * r4).
Теперь нужно подставить исходные данные и выполнить расчёт. При этом переходить в систему СИ нет необходимости: n1 = 1200 об/мин * (8 * 11) / (32 * 55) = 1200 * 1 / 20 об/мин = 60 об/мин. Для того чтобы найти угловую скорость, частоту необходимо умножить на 2p. При этом учесть, что угловая скорость измеряется в радианах в секунду. Поэтому w4 = 2 * p * n4 = 6, 28 * 1 = 6,28 рад/сек. Интересной особенностью является то, что частота вращения первого шкива в двадцать раз больше четвёртого. Задача решена.
http://zaochnik.com/spravochnik/fizika/kinematika/krivolinejnoe-dvizhenie/
http://nauka.club/fizika/krivolineyno%D0%B5-dvizheni%D0%B5.html