Численное решение обыкновенных дифференциальных уравнений (ОДУ) в Python
Рассмотрены приемы решения обыкновенных дифференциальных уравнений (ОДУ) с помощью модуля scipy.integrate языка Python
Краткое описание модуля scipy.integrate
Модуль scipy.integrate имеет две функции ode() и odeint(), которые предназначены для решения систем обыкновенных дифференциальных уравнений (ОДУ) первого порядка с начальными условиями в одной точке (т.е. задача Коши).
Функция ode() более универсальная, а функция odeint() (ODE integrator) имеет более простой интерфейс и хорошо решает большинство задач.
Функция odeint() имеет три обязательных аргумента и много опций. Она имеет следующий формат
Решение одного ОДУ
Допустим надо решить диф. уравнение 1-го порядка
Получилось что-то такое:
Решение системы ОДУ
Пусть теперь мы хотим решить (автономную) систему диф. уравнений 1-го порядка
Выходной массив w состоит из двух столбцов — y1(t) и y2(t).
Также без труда можно построить фазовые траектории:
Символьное решение линейных дифференциальных уравнений и систем методом преобразований Лапласа c применением SymPy
Реализация алгоритмов на языке Python с использованием символьных вычислений очень удобна при решении задач математического моделирования объектов, заданных дифференциальными уравнениями. Для решения таких уравнений широко используются преобразования Лапласа, которые, говоря упрощенно, позволяют свести задачу к решению простейших алгебраических уравнений.
В данной публикации предлагаю рассмотреть функции прямого и обратного преобразования Лапласа из библиотеки SymPy, которые позволяют использовать метод Лапласа для решения дифференциальных уравнений и систем средствами Python.
Сам метод Лапласа и его преимущества при решении линейных дифференциальных уравнений и систем широко освещены в литературе, например в популярном издании [1]. В книге метод Лапласа приведен для реализации в лицензионных программных пакетах Mathematica, Maple и MATLAB (что подразумевает приобретение учебным заведением этого ПО) на выбранных автором отдельных примерах.
Попробуем сегодня рассмотреть не отдельный пример решения учебной задачи средствами Python, а общий метод решения линейных дифференциальных уравнений и систем с использованием функций прямого и обратного преобразования Лапласа. При этом сохраним обучающий момент: левая часть линейного дифференциального уравнения с условиями Коши будет формироваться самим студентом, а рутинная часть задачи, состоящая в прямом преобразовании Лапласа правой части уравнения, будет выполняться при помощи функции laplace_transform().
История об авторстве преобразований Лапласа
Преобразования Лапласа (изображения по Лапласу) имеют интересную историю. Впервые интеграл в определении преобразования Лапласа появился в одной из работ Л. Эйлера. Однако в математике общепринято называть методику или теорему именем того математика, который открыл ее после Эйлера. В противном случае существовало бы несколько сотен различных теорем Эйлера.
В данном случае следующим после Эйлера был французский математик Пьер Симон де Лаплас (Pierre Simon de Laplace (1749-1827)). Именно он использовал такие интегралы в своей работе по теории вероятностей. Самим Лапласом не применялись так называемые «операционные методы» для нахождения решений дифференциальных уравнений, основанные на преобразованиях Лапласа (изображениях по Лапласу). Эти методы в действительности были обнаружены и популяризировались инженерами-практиками, особенно английским инженером-электриком Оливером Хевисайдом (1850-1925). Задолго до того, как была строго доказана справедливость этих методов, операционное исчисление успешно и широко применялось, хотя его законность ставилось в значительной мере под сомнение даже в начале XX столетия, и по этой теме велись весьма ожесточенные дебаты.
Функции прямого и обратного преобразования Лапласа

Эта функция возвращает (F, a, cond), где F(s) есть преобразование Лапласа функции f(t), a Текст программы
Время на обратное визуальное преобразование Лапласа: 2.68 s
Обратное преобразование Лапласа часто используется при синтезе САУ, где Python может заменить дорогостоящих программных “монстров” типа MathCAD, поэтому приведенное использование обратного преобразования имеет практическое значение.
Преобразование Лапласа от производных высших порядков для решения задачи Коши

Если a и b — константы, то

для всех s, таких, что существуют оба преобразования Лапласа (изображения по Лапласу) функций f(t) и q(t).
Проверим линейность прямого и обратного преобразований Лапласа с помощью ранее рассмотренных функций laplace_transform() и inverse_laplace_transform(). Для этого в качестве примера примем f(t)=sin(3t), q(t)=cos(7t), a=5, b=7 и используем следующую программу.
(7*s**3 + 15*s**2 + 63*s + 735)/((s**2 + 9)*(s**2 + 49))
(7*s**3 + 15*s**2 + 63*s + 735)/((s**2 + 9)*(s**2 + 49))
True
5*sin(3*t) + 7*cos(7*t)
5*sin(3*t) + 7*cos(7*t)
Приведенный код также демонстрирует однозначность обратного преобразования Лапласа.
Если предположить, что  удовлетворяет условиям первой теоремы, то из этой теоремы будет следовать, что:
удовлетворяет условиям первой теоремы, то из этой теоремы будет следовать, что:


Повторение этого вычисления дает

После конечного числа таких шагов мы получаем следующее обобщение первой теоремы:


Применяя соотношение (3), содержащее преобразованные по Лапласу производные искомой функции с начальными условиями, к уравнению (1), можно получить его решение по методу, специально разработанному на нашей кафедре при активной поддержке Scorobey для библиотеки SymPy.
Метод решения линейных дифференциальных уравнений и систем уравнений, основанный на преобразованиях Лапласа, с использованием библиотеки SymPy

где  — приведенное начальное положение массы,
— приведенное начальное положение массы,  — приведенная начальная скорость массы.
— приведенная начальная скорость массы.
Упрощённая физическая модель, заданная уравнением (4) при ненулевых начальных условиях [1]:

Система, состоящая из материальной точки заданной массы, закрепленной на пружине, удовлетворяет задаче Коши (задаче с начальными условиями). Материальная точка заданной массы первоначально находится в покое в положении ее равновесия.
Для решения этого и других линейных дифференциальных уравнений методом преобразований Лапласа удобно пользоваться следующей системой, полученной из соотношений (3): 




Последовательность решения средствами SymPy следующая:
- загружаем необходимые модули и явно определяем символьные переменные:
указываем версию библиотеки sympy, чтобы учесть ее особенности. Для этого нужно ввести такие строки:
по физическому смыслу задачи переменная времени определяется для области, включающей ноль и положительные числа. Задаём начальные условия и функцию в правой части уравнения (4) с её последующим преобразование по Лапласу. Для начальных условий необходимо использовать функцию Rational, поскольку использование десятичного округления приводит к ошибке.
пользуясь (5), переписываем преобразованные по Лапласу производные, входящие в левую часть уравнения (4), формируя из них левую часть этого уравнения, и сравниваем результат с правой его частью:
решаем полученное алгебраическое уравнение относительно преобразования X(s) и выполняем обратное преобразование Лапласа:
осуществляем переход из работы в библиотеке SymPyв библиотеку NumPy:
строим график обычным для Python методом:
Получаем:
Версия библиотеки sympy – 1.3

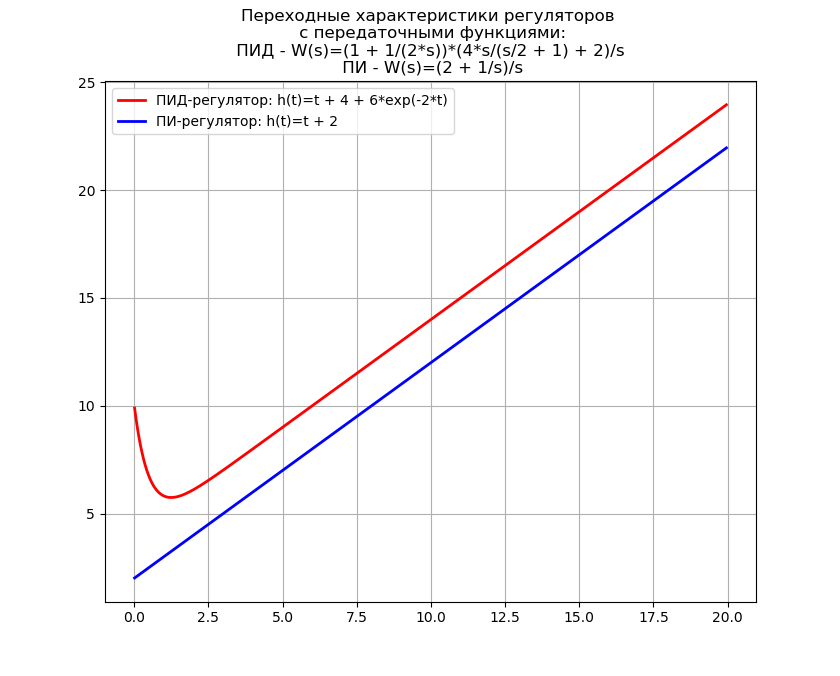
Получен график периодической функции, дающей положение материальной точки заданной массы. Метод преобразования Лапласа с использованием библиотеки SymPy дает решение не только без потребности сначала найти общее решение однородного уравнения и частное решение первоначального неоднородного дифференциального уравнения, но и без потребности использования метода элементарных дробей и таблиц Лапласа.
При этом учебное значение метода решения сохраняется за счёт необходимости использования системы (5) и перехода в NumPy для исследования решения более производительными методами.
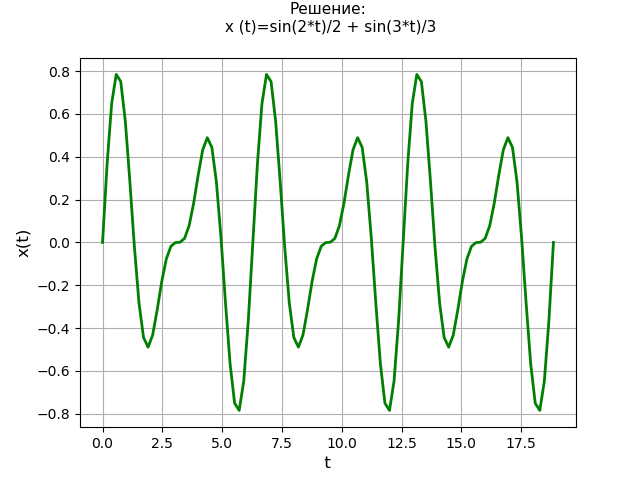
Для дальнейшей демонстрации метода решим систему дифференциальных уравнений: 
с начальными условиями 
Упрощённая физическая модель, заданная системой уравнений (6) при нулевых начальных условиях:
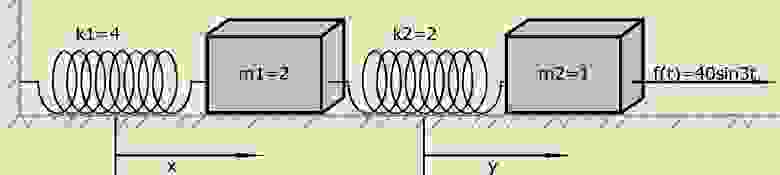
Таким образом, сила f(t) внезапно прилагается ко второй материальной точке заданной массы в момент времени t = 0, когда система находится в покое в ее положении равновесия.
Решение системы уравнений идентично ранее рассмотренному решению дифференциального уравнения (4), поэтому привожу текст программы без пояснений.

Для ненулевых начальных условий текст программы и график функций примет вид:

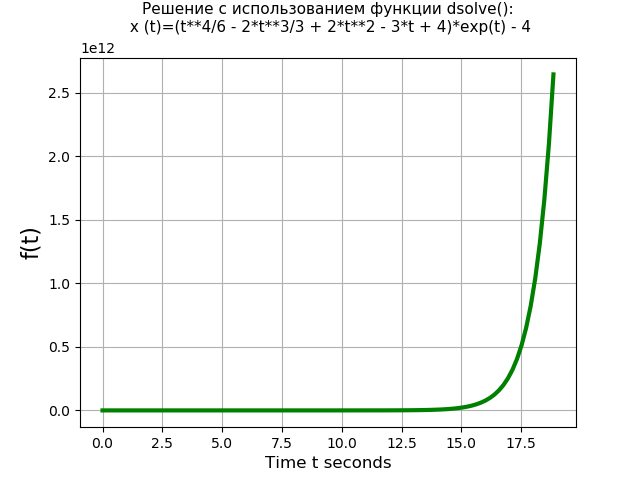
Рассмотрим решение линейного дифференциального уравнения четвёртого порядка с нулевыми начальными условиями: 


Решим линейное дифференциальное уравнение четвёртого порядка: 
с начальными условиями  ,
,  ,
,  .
.
Функции для решения ОДУ
Для имеющих аналитическое решение ОДУ и систем ОДУ применяется функция dsolve():
sympy.solvers.ode.dsolve(eq, func=None, hint=’default’, simplify=True, ics=None, xi=None, eta=None, x0=0, n=6, **kwargs)
Давайте сравним производительность функции dsolve() с методом Лапласа. Для примера возьмём следующее дифференциальное уравнение четвёртой степени с нулевыми начальными условиями: 

Время решения уравнения с использованием функции dsolve(): 1.437 s
Время решения уравнения с использованием преобразования Лапласа: 3.274 s
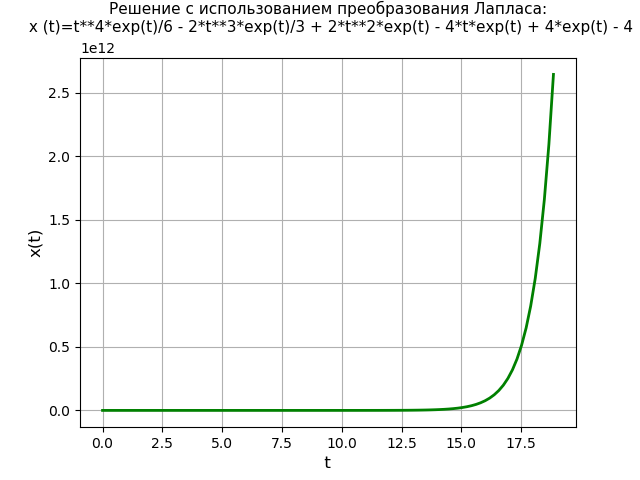
Итак, функция dsolve() (1.437 s) решает уравнение четвёртого порядка быстрее, чем выполняется решение по методу преобразований Лапласа (3.274 s) более чем в два раза. Однако при этом следует отметить, что функция dsolve() не решает системы дифференциальных уравнений второго порядка, например, при решении системы (6) с использованием функция dsolve() возникает ошибка:
Данная ошибка означает, что решение системы дифференциальных уравнений с помощью функции dsolve() не может быть представлено символьно. Тогда как при помощи преобразований Лапласа мы получили символьное представление решения, и это доказывает эффективность предложенного метода.
Для того чтобы найти необходимый метод решения дифференциальных уравнений с помощью функции dsolve(), нужно использовать classify_ode(eq, f(x)), например:
Eq(f(x), C1*sin(x) + C2*cos(x))
(‘nth_linear_constant_coeff_homogeneous’, ‘2nd_power_series_ordinary’)
(‘separable’, ‘1st_exact’, ‘almost_linear’, ‘1st_power_series’, ‘lie_group’, ‘separable_Integral’, ‘1st_exact_Integral’, ‘almost_linear_Integral’)
[Eq(f(x), -acos((C1 + Integral(0, x))*exp(-Integral(-tan(x), x))) + 2*pi), Eq(f(x), acos((C1 + Integral(0,x))*exp(-Integral(-tan(x), x))))]
Таким образом, для уравнения eq=Eq(f(x).diff(x,x)+f(x),0) работает любой метод из первого списка:
Для уравнения eq = sin(x)*cos(f(x)) + cos(x)*sin(f(x))*f(x).diff(x) работает любой метод из второго списка:
separable, 1st_exact, almost_linear,
1st_power_series, lie_group, separable_Integral,
1st_exact_Integral, almost_linear_Integral
Чтобы использовать выбранный метод, запись функции dsolve() примет вид, к примеру:
Вывод:
Данная статья ставила своей целью показать, как использовать средства библиотек SciPy и NumPy на примере решения систем линейных ОДУ операторным методом. Таким образом, были рассмотрены методы символьного решения линейных дифференциальных уравнений и систем уравнений методом Лапласа. Проведен анализ производительности этого метода и методов, реализованных в функции dsolve().
- Дифференциальные уравнения и краевые задачи: моделирование и вычисление с помощью Mathematica, Maple и MATLAB. 3-е издание.: Пер. с англ. — М.: ООО «И.Д. Вильяме», 2008. — 1104 с.: ил. — Парал. тит. англ.
- Использование обратного преобразования Лапласа для анализа динамических звеньев систем управления
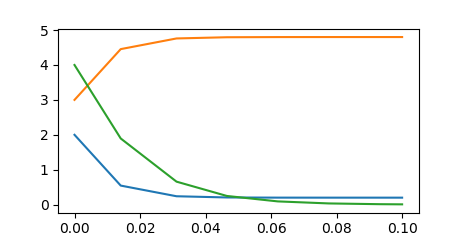
Любой способ решить систему связанных дифференциальных уравнений в python?
Я работал с sympy и scipy, но не могу найти или выяснить, как решить систему связанных дифференциальных уравнений (нелинейных, первого порядка).
Итак, есть ли способ решить связанные дифференциальные уравнения?
уравнения имеют вид:
с начальными условиями для v11(s), v22(s), v12 (s).
2 ответов
для численного решения оду с помощью scipy см. функцию scipy.интегрировать.odeint или класс scipy.интегрировать.ода!—2—>.
некоторые примеры приведены в Составляющей Поваренной (прокрутите вниз до раздела «обыкновенные дифференциальные уравнения»).
в дополнение к методам SciPy odeint и ode что уже упоминалось, теперь имеет solve_ivp что является более новым и часто более удобным. Полный пример, кодировка [v11, v22, v12] в массиве v :
это решает систему на интервале (0, 0.1) С начальной стоимостью [2, 3, 4] . Результат имеет независимую переменную (s в вашей нотации) как res.t :
эти значения были выбраны автоматически. Можно обеспечить t_eval чтобы решение оценивалось в нужных точках: например, t_eval=np.linspace(0, 0.1) .
зависимая переменная (функция, которую мы ищем) в res.y :
С Matplotlib это решение строится как plt.plot(res.t, res.y.T) (сюжет был бы более гладким, если бы я предоставил t_eval как уже упоминалось).
наконец, если бы система включала уравнения порядка выше 1, нужно было бы использовать уменьшение до 1-го система заказов.
http://habr.com/ru/post/426041/
http://askdev.ru/q/lyuboy-sposob-reshit-sistemu-svyazannyh-differencialnyh-uravneniy-v-python-244674/