Система линейных уравнений







Линейные уравнения
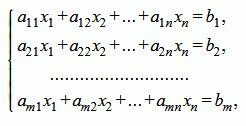
В общем случае линейное уравнение имеет вид:
Любой n-мерный вектор Х = (x1, x2. xn) называется решением уравнения, если при подстановке его координат уравнение обращается в тождество.
Два линейных уравнения называются равносильными, если они имеют одно и тоже множество решений.
Три случая при решении линейных уравнений
- Если коэффициенты при неизвестных a1 = a2 = . = an =0 и b = 0, в этом случае уравнение имеет вид: 0*x1+0*x2+. +0*xn=0 и называется тривиальным (данное уравнение имеет бесконечное множество решений)
- Если коэффициенты a1 = a2 = . = an =0, а b ≠ 0, в этом случае уравнение имеет вид: 0*x1+0*x2+. +0*xn= b и называется противоречивым. (данное уравнение не имеет ни одного решения)
- Хотя бы один из коэффициентов при неизвестных отличен от нуля.
Пусть а1 ≠0. В этом случае можно разрешить уравнение относительно x1:

Важно: При этом x1 называется разрешенной неизвестной, x2, x3. xn называются свободными неизвестными. Если свободными неизвестным придать любые конкретные значения x2=k2, x3=k3. xn=kn, то вектор K=(k2, k3. kn) является решением исходного уравнения.
Системы линейных уравнений
Классификация систем линейных уравнений по количеству решений
В общем случае система линейных уравнений, содержащая m уравнений и n уравнений имеет вид:

где, aij (i=1,2. m; j=1,2. n) и bi (i=1,2. m), постоянные величины.
Решением системы уравнений называется такой n-мерный вектор Х = (x1, x2. xn), который одновременно является решением каждого из уравнений системы.
Векторная и матричная формы записи систем линейных уравнений
Векторная форма записи
Система уравнений может быть записана в векторном виде:

Пример 1. Записать в векторном виде.

Матричная форма записи
В матричной записи система линейных уравнений может быть записана следующим образом:
AX=B

Пример 2: Записать в матричном виде систему из предыдущего примера
Метод Гаусса онлайн
Данный онлайн калькулятор находит решение системы линейных уравнений (СЛУ) методом Гаусса. Дается подробное решение. Для вычисления выбирайте количество переменных и количество уравнений. Затем введите данные в ячейки и нажимайте на кнопку «Вычислить.»
Предупреждение
Инструкция ввода данных. Числа вводятся в виде целых чисел (примеры: 487, 5, -7623 и т.д.), десятичных чисел (напр. 67., 102.54 и т.д.) или дробей. Дробь нужно набирать в виде a/b, где a и b (b>0) целые или десятичные числа. Примеры 45/5, 6.6/76.4, -7/6.7 и т.д.
Метод Гаусса
Метод Гаусса − это метод перехода от исходной системы линейных уравнений (при помощи эквивалентных преобразований) к системе, которая решается проще, чем исходная система.
Эквивалентными преобразованиями системы линейных уравнений являются:
- перемена местами двух уравнений в системе,
- умножение какого-либо уравнения в системе на ненулевое действительное число,
- прибавление к одному уравнению другого уравнения, умноженного на произвольное число.
Рассмотрим систему линейных уравнений:
 | (1) |
Запишем систему (1) в матричном виде:
| Ax=b | (2) |
  | (3) |
A-называется матрица коэффициентов системы, b − правая часть ограничений, x− вектор переменных, которую нужно найти. Пусть rang(A)=p.
Эквивалентные преобразования не меняют ранг матрицы коэффициентов и ранг расширеннной матрицы системы. Не меняется также множество решений системы при эквивалентных преобразованиях. Суть метода Гаусса заключается в приведении матрцы коэффициентов A к диагональному или ступенчатому.
Построим расшренную матрицу системы:
 | (4) |
Предположим a11≠0. Если это не так, то можно поменять местами эту строку со строкой с ненулевым элементом в столбце 1 (если нет таких строк, то переходим к следующему столбцу). Обнуляем все элементы столбца 1 ниже ведущего элемента a11. Для этого сложим строки 2,3, . m со строкой 1, умноженной на −a21/a11, −a31/a11, . −am1/a11, соответственно. Тогда (4) примет следующий вид:
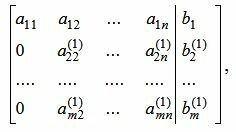 | (5) |
На следующем этапе обнуляем все элементы столбца 2, ниже элемента  . Если данный элемент нулевой, то эту строку меняем местами со строкой, лежащий ниже данной строки и имеющий ненулевой элемент во втором столбце. Далее обнуляем все элементы столбца 2 ниже ведущего элемента a22. Для этого сложим строки 3, . m со строкой 2, умноженной на −a32/a22, . −am2/a22, соответственно. Продолжая процедуру, получим матрицу диагонального или ступенчатого вида. Пусть полученная расширенная матрица имеет вид:
. Если данный элемент нулевой, то эту строку меняем местами со строкой, лежащий ниже данной строки и имеющий ненулевой элемент во втором столбце. Далее обнуляем все элементы столбца 2 ниже ведущего элемента a22. Для этого сложим строки 3, . m со строкой 2, умноженной на −a32/a22, . −am2/a22, соответственно. Продолжая процедуру, получим матрицу диагонального или ступенчатого вида. Пусть полученная расширенная матрица имеет вид:
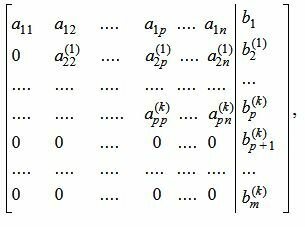 | (6) |
Обратим внимание на последние строки. Если  .
.  равны нулю, то система линейных уравнений имеет решение, если же хотя бы один из этих чисел отлично от нуля, то система несовместна. Иными словами, система (2) совместна тогда и только тогда, когда ранг матрицы A навен рангу расширенной матрицы (A|b).
равны нулю, то система линейных уравнений имеет решение, если же хотя бы один из этих чисел отлично от нуля, то система несовместна. Иными словами, система (2) совместна тогда и только тогда, когда ранг матрицы A навен рангу расширенной матрицы (A|b).
Пусть  . Тогда
. Тогда
  |
  | (7) |
 |
Так как rangA=rang(A|b), то множество решений (7) есть (n−p)− многообразие. Следовательно n−p неизвестных  можно выбрать произвольно. Остальные неизвестные
можно выбрать произвольно. Остальные неизвестные  из системы (7) вычисляются так. Из последнего уравнения выражаем xp через остальные переменные и вставляем в предыдущие выражения. Далее из предпоследнего уравнения выражаем xp−1 через остальные переменные и вставляем в предыдущие выражения и т.д. Рассмотрим метод Гаусса на конкретных примерах.
из системы (7) вычисляются так. Из последнего уравнения выражаем xp через остальные переменные и вставляем в предыдущие выражения. Далее из предпоследнего уравнения выражаем xp−1 через остальные переменные и вставляем в предыдущие выражения и т.д. Рассмотрим метод Гаусса на конкретных примерах.
Примеры решения системы линейных уравнений методом Гаусса
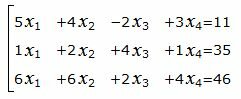
Пример 1. Найти общее решение системы линейных уравнений методом Гаусса:
 |
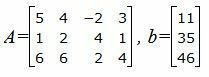
Матричный вид записи: Ax=b, где
 |
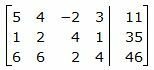
Для решения системы, запишем расширенную матрицу:
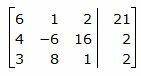 |
Обозначим через aij элементы i-ой строки и j-ого столбца.
Исключим элементы 1-го столбца матрицы ниже элемента a1 1. Для этого сложим строки 2,3 со строкой 1, умноженной на -2/3,-1/2 соответственно:
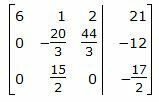 |
Исключим элементы 2-го столбца матрицы ниже элемента a2 2. Для этого сложим строку 3 со строкой 2, умноженной на 9/8:
 |
Делим каждую строку матрицы на соответствующий ведущий элемент (если ведущий элемент существует):
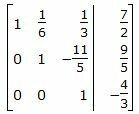 |
Из вышеизложенной таблицы можно записать:
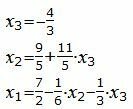 |
Подставив верхние выражения в нижние, получим решение.
 , , , , . . |
Пример 2. Найти общее решение системы линейных уравнений методом Гаусса:
 |
Матричный вид записи: Ax=b, где
 |
Для решения системы, построим расширенную матрицу:
 |
Обозначим через aij элементы i-ой строки и j-ого столбца.
Исключим элементы 1-го столбца матрицы ниже элемента a11. Для этого сложим строки 2,3 со строкой 1, умноженной на -1/5,-6/5 соответственно:
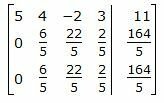 |
Исключим элементы 2-го столбца матрицы ниже элемента a22. Для этого сложим строку 3 со строкой 2, умноженной на -1:
 |
Делим каждую строку матрицы на соответствующий ведущий элемент (если ведущий элемент существует):
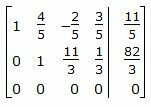 |
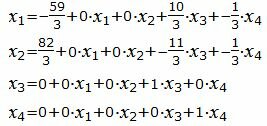
Выразим переменные x1, x2 относительно остальных переменных.
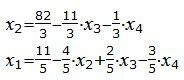 |
где x3, x4− произвольные действительные числа.
Подставив верхние выражения в нижние, получим решение.
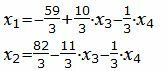 |
где x3, x4− произвольные действительные числа.
Векторный вариант решения:
Запишем вышеизложенное решение, представив свободные переменные в виде тождеств:
 |
Тогда векторное решение можно представить так:
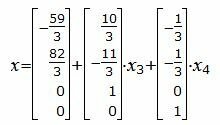 |
где x3, x4− произвольные действительные числа.
Уравнения прямых и плоскостей
Поверхности и линии первого порядка.
Уравнение первой степени, или линейное уравнение, связывающее координаты точки в пространстве, имеет вид
$$
Ax+By+Cz+D = 0,\label
$$
причем предполагается, что коэффициенты при переменных не равны нулю одновременно, то есть \(A^<2>+B^<2>+C^ <2>\neq 0\). Аналогично, линейное уравнение, связывающее координаты точки на плоскости, — это уравнение
$$
Ax+By+C = 0,\label
$$
при условии \(A^<2>+B^ <2>\neq 0\).
В школьном курсе доказывается, что в декартовой прямоугольной системе координат уравнения \eqref
В общей декартовой системе координат в пространстве каждая плоскость может быть задана линейным уравнением
$$
Ax+By+Cz+D = 0.\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат определяет плоскость.
В общей декартовой системе координат на плоскости каждая прямая может быть задана линейным уравнением
$$
Ax+By+C = 0,\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат на плоскости определяет прямую.
Эти теоремы полностью решают вопрос об уравнениях плоскости и прямой линии на плоскости. Однако ввиду важности этих уравнений мы рассмотрим их в других формах. При этом будут получены независимые доказательства теорем этого пункта.
Параметрические уравнения прямой и плоскости.
Мы будем предполагать, что задана декартова система координат в пространстве (или на плоскости, если мы изучаем прямую в планиметрии). Это, в частности, означает, что каждой точке сопоставлен ее радиус-вектор относительно начала координат.
 Рис. 6.1
Рис. 6.1
Вектор \(\overrightarrow
$$
\boldsymbol
$$
Наоборот, какое бы число мы ни подставили в формулу \eqref
Уравнение \eqref
Векторное параметрическое уравнение выглядит одинаково и в планиметрии, и в стереометрии, но при разложении по базису оно сводится к двум или трем скалярным уравнениям, смотря по тому, сколько векторов составляют базис.
Получим теперь параметрические уравнения плоскости. Обозначим через \(\boldsymbol
\) и \(\boldsymbol\) ее направляющие векторы, а через \(\boldsymbol
 Рис. 6.2
Рис. 6.2
Вектор \(\overrightarrow
\) и \(\boldsymbol\) не коллинеарны, в этом и только этом случае \(\boldsymbol
$$
\boldsymbol
+t_<2>\boldsymbol.\label
$$
Это уравнение называется параметрическим уравнением плоскости. Каждой точке плоскости оно сопоставляет значения двух параметров \(t_<1>\) и \(t_<2>\). Наоборот, какие бы числа мы ни подставили как значения \(t_<1>\) и \(t_<2>\), уравнение \eqref
Пусть \((x, y, z)\) и \((x_<0>, y_<0>, z_<0>)\) — координаты точек \(M\) и \(M_<0>\) соответственно, а векторы \(\boldsymbol
\) и \(\boldsymbol\) имеют компоненты \((p_<1>, p_<2>, p_<3>)\) и \((q_<1>, q_<2>, q_<3>)\). Тогда, раскладывая по базису обе части уравнения \eqref
$$
x-x_ <0>= t_<1>p_<1>+t_<2>q_<1>,\ y-y_ <0>= t_<1>p_<2>+t_<2>q_<2>,\ z-z_ <0>= t_<1>p_<3>+t_<2>q_<3>.\label
$$
Отметим, что начальная точка и направляющий вектор прямой образуют на ней ее внутреннюю декартову систему координат. Значение параметра \(t\), соответствующее какой-то точке, является координатой этой точки во внутренней системе координат. Точно так же на плоскости начальная точка и направляющие векторы составляют внутреннюю систему координат, а значения параметров, соответствующие точке, — это ее координаты в этой системе.
Прямая линия на плоскости.
Поэтому мы можем сформулировать следующее утверждение.
В любой декартовой системе координат на плоскости уравнение прямой с начальной точкой \(M_<0>(x_<0>, y_<0>)\) и направляющим вектором \(\boldsymbol(a_<1>, a_<2>)\) может быть записано в виде \eqref
Уравнение \eqref
Вектор с координатами \((-B, A)\) можно принять за направляющий вектор прямой с уравнением \eqref
Если система координат декартова прямоугольная, то вектор \(\boldsymbol
Действительно, в этом случае \((\boldsymbol, \boldsymbol
Пусть в уравнении прямой \(Ax+By+C = 0\) коэффициент \(B\) отличен от нуля. Это означает, что отлична от нуля первая компонента направляющего вектора, и прямая не параллельна оси ординат. В этом случае уравнение прямой можно представить в виде
$$
y = kx+b,\label
$$
где \(k = -A/B\), а \(b = -C/B\). Мы видим, что к равно отношению компонент направляющего вектора: \(k = a_<2>/a_<1>\) (рис. 6.3).
 Рис. 6.3. k=-1. Прямая y=-x+1/2
Рис. 6.3. k=-1. Прямая y=-x+1/2
Отношение компонент направляющего вектора \(a_<2>/a_<1>\) называется угловым коэффициентом прямой.
Угловой коэффициент прямой в декартовой прямоугольной системе координат равен тангенсу угла, который прямая образует с осью абсцисс. Угол этот отсчитывается от оси абсцисс в направлении кратчайшего поворота от \(\boldsymbol
 Рис. 6.4. \(k=\operatorname
Рис. 6.4. \(k=\operatorname
Положив \(x = 0\) в уравнении \eqref
Если же в уравнении прямой \(B = 0\) и ее уравнение нельзя представить в виде \eqref
Векторные уравнения плоскости и прямой.
Параметрическое уравнение плоскости утверждает, что точка \(M\) лежит на плоскости тогда и только тогда, когда разность ее радиус-вектора и радиус-вектора начальной точки \(M_<0>\) компланарна направляющим векторам \(\boldsymbol
\) и \(\boldsymbol\). Эту компланарность можно выразить и равенством
$$
(\boldsymbol
, \boldsymbol) = 0.\label
$$
Вектор \(\boldsymbol
, \boldsymbol]\) — ненулевой вектор, перпендикулярный плоскости. Используя его, мы можем записать уравнение \eqref
$$
(\boldsymbol
$$
Уравнения \eqref
$$
(\boldsymbol
$$
Для прямой на плоскости можно также написать векторные уравнения, аналогичные \eqref
$$
(\boldsymbol
$$
Первое из них выражает тот факт, что вектор \(\boldsymbol
Пусть \(x, y, z\) — компоненты вектора \(\boldsymbol
Обратно, для любого линейного многочлена найдутся такие векторы \(\boldsymbol
Первая часть предложения очевидна: подставим разложение вектора \(\boldsymbol
$$
(x\boldsymbol
$$
раскроем скобки и получим многочлен \(Ax+By+Cz+D\), в котором \(D = -(\boldsymbol
$$
A = (\boldsymbol
$$
\(A\), \(B\) и \(C\) одновременно не равны нулю, так как ненулевой вектор \(\boldsymbol
Для доказательства обратного утверждения найдем сначала вектор \(\boldsymbol
$$
\boldsymbol
$$
Вектор \(\boldsymbol
Итак, мы нашли векторы \(\boldsymbol
$$
x(\boldsymbol
$$
который совпадает с требуемым \((\boldsymbol
Если система координат декартова прямоугольная, то вектор с компонентами \(A\), \(B\), \(C\) является нормальным вектором для плоскости с уравнением \(Ax+By+Cz+D = 0\).
Это сразу вытекает из формул \eqref
Любые два неколлинеарных вектора, удовлетворяющие уравнению \eqref
Утверждение 5 нетрудно доказать и непосредственно, рассматривая координаты вектора, параллельного плоскости, как разности соответствующих координат двух точек, лежащих в плоскости.
Все, сказанное о плоскостях, почти без изменений может быть сказано и о прямых на плоскости. В частности, верно следующее утверждение.
Действительно, \(\alpha_<1>, \alpha_<2>\), должны быть пропорциональны компонентам — \(B\), \(A\) направляющего вектора прямой.
Параллельность плоскостей и прямых на плоскости.
Ниже, говоря о параллельных прямых или плоскостях, мы будем считать, что параллельные плоскости (или прямые) не обязательно различны, то есть что плоскость (прямая) параллельна самой себе.
Прямые линии, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B.\label
$$
Прямые совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнения \eqref
$$
C_ <1>= \lambda C.\label
$$
Первая часть предложения прямо следует из того, что векторы с компонентами \((-B, A)\) и \((-B_<1>, A_<1>)\) — направляющие векторы прямых.
Докажем вторую часть. В равенствах \eqref
Обратно, пусть прямые параллельны. В силу первой части предложения их уравнения должны иметь вид \(Ax+By+C = 0\) и \(\lambda(Ax+By)+C_ <1>= 0\) при некотором \(\lambda\). Если, кроме того, существует общая точка \(M_<0>(x_<0>, y_<0>)\) обеих прямых, то \(Ax_<0>+By_<0>+C = 0\) и \(\lambda(Ax_<0>+By_<0>)+C_ <1>= 0\). Вычитая одно равенство из другого, получаем \(C_ <1>= \lambda C\), как и требовалось.
Плоскости, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+Cz+D = 0,\ A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B,\ C_ <1>= \lambda C.\label
$$
Плоскости совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнений \eqref
$$
D_ <1>= \lambda D.\label
$$
Если плоскости параллельны, то их нормальные векторы \(\boldsymbol
Условия \eqref
$$
\begin
A& B\\
A_<1>& B_<1>
\end
= 0,\label
$$
а условие параллельности плоскостей — в виде
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
= 0.\label
$$
Утверждению 7 можно придать чисто алгебраическую формулировку, если учесть, что координаты точки пересечения прямых — это решение системы, составленной из их уравнений.
При условии \eqref
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
не имеет решений или имеет бесконечно много решений (в зависимости от \(C\) и \(C_<1>\). В последнем случае система равносильна одному из составляющих ее уравнений. Если же
$$
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\nonumber
$$
то при любых \(C\) и \(C_<1>\) система имеет единственное решение \((x, y)\).
Уравнения прямой в пространстве.
Прямая линия в пространстве может быть задана как пересечение двух плоскостей и, следовательно, в общей декартовой системе координат определяется системой уравнений вида
$$
\left\<\begin
Ax+By+Cz+D = 0,\\
A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0.
\end
$$
Пересечение плоскостей — прямая линия тогда и только тогда, когда они не параллельны, что согласно \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\label
$$
Разумеется, систему \eqref
Вспомним параметрические уравнения прямой \eqref
$$
t = \frac
$$
и мы получаем два равенства
$$
\frac
$$
или, в более симметричном виде,
$$
\frac
$$
Уравнения \eqref
Если обращается в нуль одна из компонент направляющего вектора, например, \(\alpha_<1>\), то уравнения прямой принимают вид
$$
x = x_<0>,\ \frac
$$
Эта прямая лежит в плоскости \(x = x_<0>\) и, следовательно, параллельна плоскости \(x = 0\). Аналогично пишутся уравнения прямой, если в нуль обращается не \(\alpha_<1>\), а другая компонента.
Когда равны нулю две компоненты направляющего вектора, например, \(\alpha_<1>\) и \(\alpha_<2>\), то прямая имеет уравнения
$$
x = x_<0>,\ y = y_<0>.\label
$$
Такая прямая параллельна одной из осей координат, в нашем случае — оси аппликат.
Важно уметь находить начальную точку и направляющий вектор прямой, заданной системой линейных уравнений \eqref
Не будем доказывать этого, хотя это и не трудно сделать. Для ясности, заменяя \(z\) на \(t\), получаем параметрические уравнения прямой
$$
x = \alpha_<1>t+\beta_<1>,\ y = \alpha_<2>t+\beta_<2>,\ z = t.\nonumber
$$
Первые две координаты начальной точки прямой \(M_<0>(\beta_<1>, \beta_<2>, 0)\) можно получить, решая систему \eqref
Из параметрических уравнений видно, что в этом случае направляющий вектор имеет координаты \((\alpha_<1>, \alpha_<2>, 1)\). Найдем его компоненты в общем виде. Если система координат декартова прямоугольная, векторы с компонентами \((A, B, C)\) и \(A_<1>, B_<1>, C_<1>\) перпендикулярны соответствующим плоскостям, а потому их векторное произведение параллельно прямой \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
$$
Вектор с компонентами \eqref
Согласно утверждению 5 каждый ненулевой вектор, компоненты которого \((\alpha_<1>, \alpha_<2>, \alpha_<3>)\) удовлетворяют уравнению \(A\alpha_<1>+B\alpha_<2>+C\alpha_ <3>= 0\), параллелен плоскости с уравнением \(Ax+By+Cz+D = 0\). Если, кроме того, он удовлетворяет уравнению \(A_<1>\alpha_<1>+B_<1>\alpha_<2>+C_<1>\alpha_ <3>= 0\), то он параллелен и второй плоскости, то есть может быть принят за направляющий вектор прямой. Вектор с компонентами \eqref
http://matworld.ru/calculator/gauss-method-online.php
http://univerlib.com/analytic_geometry/vector_algebra/lines_and_planes_equations/