3. Частотные характеристики звеньев и систем автоматического управления. ч. 3.2 Простейшие типовые звенья
Лекции по курсу «Управление Техническими Системами» читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки» факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность!
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
Тема сегодняшней статьи:
3.2. Типовые звенья систем автоматического управления (регулирования). Классификация типовых звеньев. Простейшие типовые звенья.
Хочешь вкусить плодов познания? — Грызи гранит науки!
Понятие “типовые звенья” в теории управления техническими системами, в основном, связано с описанием САУ (САР) в переменных “вход – выход”, т.е. описание систем в передаточных функциях. Любую линейную САУ (САР) или линеаризованную САР можно структурно расчленить на простейшие элементы (звенья), соединенные между собой соответствующими последовательными, параллельными связями, местными и локальными обратными связями, сумматорами, сравнивающими устройствами и т.д.
Достигнуто общепринятое соглашение, что наиболее удобно расчленять структурную схему САР на звенья 1-го и 2-го порядков. Принято называть такие простейшие звенья типовыми.
С другой стороны, реальная линеаризованная (линейная) система состоит из набора отдельных узлов и агрегатов, соединенных соответствующими связями, причем порядок уравнений динамики вышеуказанных узлов и агрегатов может быть и выше второго. В этом случае звенья (узлы и агрегаты) САР можно классифицировать по их свойствам.
Различают 3 типа звеньев:
Существуют также особые звенья, которые будут рассмотрены позднее.
Учитывая, что передаточная функция линейного (линеаризованного) звена может быть записана как:

где:  и
и  — полиномы по степеням s, причем коэффициенты при низшей степени s в полиномах , равны 1, классификацию на типы звеньев можно объяснить видом полиномов
— полиномы по степеням s, причем коэффициенты при низшей степени s в полиномах , равны 1, классификацию на типы звеньев можно объяснить видом полиномов  или (что эквивалентно) видом коэффициентов в соответствующих уравнениях динамики звена.
или (что эквивалентно) видом коэффициентов в соответствующих уравнениях динамики звена.
Подробнее о передаточной функции см. здесь.
Позиционным звеном считают звено, в котором полиномы N(s) и L(s) содержат свободные члены (равные 1). Например:

или в уравнении динамики (x(t) – входной сигнал, y(t) – выходной):

Из типовых звеньев (1-го и 2-го порядка) к позиционным звеньям относятся: идеальное усилительное звено, апериодические звенья 1-го и 2-го порядка, колебательное звено и форсирующее звено.
Дифференцирующим звеном считается звено, в котором полином L(s) содержит свободный член (равный 1), а полином N(s) не содержит свободного члена ( ).
).
Например:

или в уравнении динамики:

Из типовых звеньев к дифференцирующим звеньям относятся идеальное дифференцирующее звено, инерционно-дифференцирующее звено.
Интегрирующим звеном считается звено, в котором полином N(s) содержит свободный член ( ), а полином L(s), не содержит свободного члена (
), а полином L(s), не содержит свободного члена ( ). Например:
). Например:

или в уравнении динамики:

Из типовых звеньев к интегрирующим звеньям относятся идеальное интегрирующее звено, инерционно–интегрирующее звено.
Пример переходного процесса при единичном ступенчатом воздействии на три разных звена, приведенных выше: 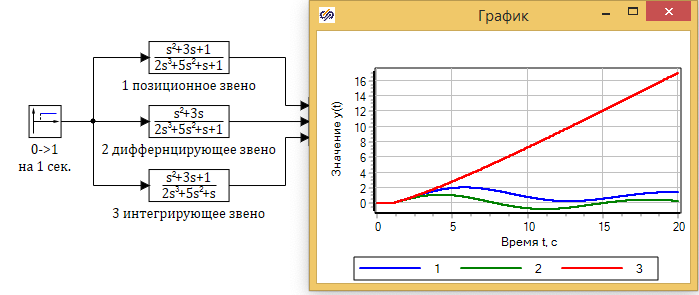
3.2.1. Идеальное усилительное звено
Уравнение динамики каждого звена имеет вид:  , т.е. уравнение не является дифференциальным, следовательно, данное звено является безынерционным.
, т.е. уравнение не является дифференциальным, следовательно, данное звено является безынерционным.
Переходя к изображениям  , получаем:
, получаем:
 – уравнение динамики звена в изображениях.
– уравнение динамики звена в изображениях.
Передаточная функция идеального усилительного звена:

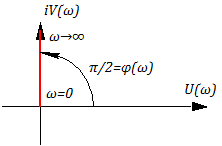
АФЧХ не зависит от ω, поскольку:

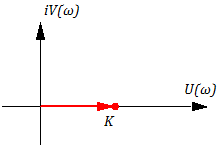
Рисунок 3.2.1 АФЧХ идеального усилительного звена
Годограф АФЧХ “вырождается” в точку: U(ω) =K; V(ω) =0;
A(ω) ≡modW(iω) =│W(iω)│=K =>
Lm(ω)=20lgA(ω) =20lgK; =>
φ(ω) = const = 0 т.е. фазового сдвига нет. Следовательно, данное звено является безынерционным, чисто усилительным звеном.

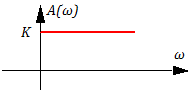
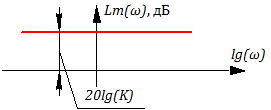
Рисунок 3.2.4 ЛАХ идеального усилительного звена
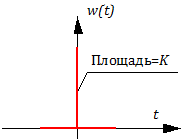
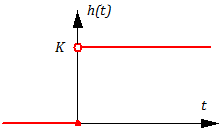
Найдем весовую w(t) и переходную h(t) функции звена (подробнее см. здесь).
Весовая функция:


3.2.2. Идеальное дифференцирующее звено
Уравнение динамики звена имеет вид:

где:  – постоянная времени.
– постоянная времени.
Переходя к изображениям:

Уравнение динамики звена в изображениях:

Передаточная функция идеального дифференцирующего звена:


Графики годографа АФЧХ, A(ω) и φ(ω) имеют вид:
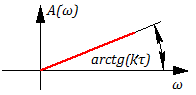

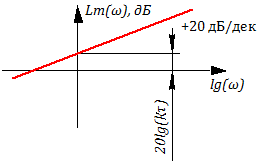
Логарифмическая амплитудная характеристика ЛАХ: :
:
Из рисунка 3.2.9 видно, что данное звено обеспечивает опережение по фазе на  /2 (при любой частоте входного сигнала).
/2 (при любой частоте входного сигнала).
Чем выше частота единичного гармонического сигнала на входе в звено, тем выше амплитуда выходного сигнала в установившемся режиме.
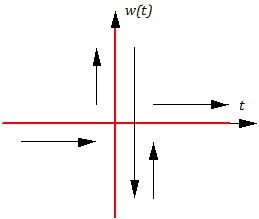
Найдем весовую функцию звена:

Учитывая, что δ(t) имеет вид как на рис.3.2.11 (зависимость показана утрированно), а весовая функция пропорциональна производной от δ(t):

Найдем переходную функцию звена:


Иногда идеальное дифференцирующее звено представляется в виде  или
или  . В последнем варианте коэффициент К имеет смысл постоянной времени.
. В последнем варианте коэффициент К имеет смысл постоянной времени.
3.2.3. Идеальное интегрирующее звено
Уравнение динамики такого звена имеет вид:

или в изображениях:

Передаточная функция идеального интегрирующего звена:


Умножая числитель и знаменатель на i, получаем:

Годограф АФЧХ имеет вид:
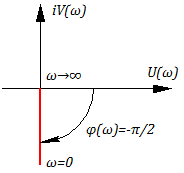


Данное звено всегда дает отставание по фазе на угол  .
.

Найдем весовую функцию звена:


Найдем переходную функцию звена:


Примерами устройств, близких к идеальному усилительному звену, можно считать: широкополосный электронный усилитель (приближенно), механический редуктор без учета инерционности и нелинейных эффектов, жесткую механическую муфту и т.д.
Примером идеального дифференцирующего звена можно считать тахогенератор:

где u(t) – напряжение на клеммах тахогенератора, φ(t) – угол поворота якоря (ротора) тахогенератора.
Примером идеального интегрирующего звена можно считать большинство электродвигателей (без учета инерционности якоря), где входным воздействием считать напряжение в обмотке возбудителя (двигателем постоянного тока), а выходным воздействием – угол поворота выходного вала.
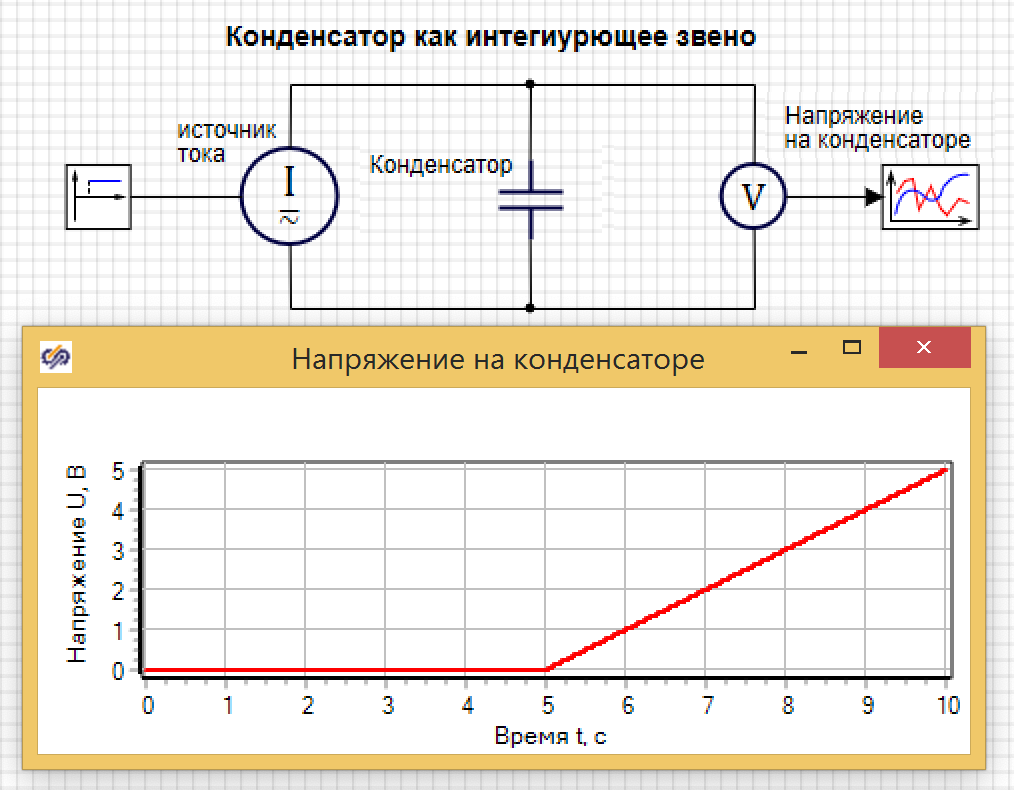
Пример интегрирующего и дифференцирующего звена на основе конденсатора
Один и тот же технический элемент, с точки зрения теории автоматического управления, может выступать как в качестве интегрирующего, так и в качестве дифференцирующего звена.
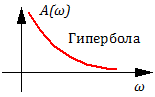
В качестве примера интегрирующего звена можно рассмотреть конденсатор, где входным воздействием является ток, а выходным результатом является напряжение на клеммах конденсатора. Действительно, при малом токе и большой емкости конденсатора, в случае ступенчатого изменения тока с 0, мы получаем график напряжения, совпадающий по форме с переходной функцией интегрирующего звена. На рисунке 3.2.20 представлена такая модель, где ток ступенькой меняется на пятой секунде расчета.
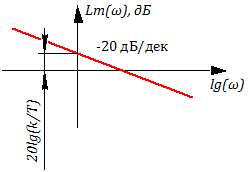
Если построить с помощью гармонического анализатора ЛАХ и ФЧХ, мы увидим, что угол наклона ЛАХ составляет -20 dB/dec, а угол сдвига фазы равен —  или -90 градусов на графике (см. рис. 3.2.21).
или -90 градусов на графике (см. рис. 3.2.21).

Тот же самый конденсатор, при определенных параметрах сети, может выступать в качестве идеального дифференцирующего звена, если в качестве входного воздействия подавать напряжение, а в качестве результирующей величины использовать ток в цепи.
Электрическая схема использования конденсатора в качестве дифференцирующего звена с гармоническим анализатором приведена на рисунке 3.2.22. На графиках гармонического анализатора видно, что угол наклона ЛАХ составляет 20 dB/dec, а угол сдвига фазы равен или 90 градусов на графике.

Примеры моделей, использованные в данной лекции, можно взять в этом архиве.
Типовые динамические звенья
Типовым динамическим звеном САУ является составная часть системы, которая описывается дифференциальным уравнением не выше второго порядка. Звено, как правило, имеет один вход и один выход. По динамическим свойствам типовые звенья делятся на следующие разновидности: позиционные, дифференцирующие и интегрирующие.
Позиционными звеньями являются такие звенья, у которых в установившемся режиме наблюдается линейная зависимость между входными и выходными сигналами. При постоянном уровне входного сигнала сигнал на выходе также стремится к постоянному значению.
Дифференцирующими являются такие звенья, у которых в установившемся режиме выходной сигнал пропорционален производной по времени от входного сигнала.
Интегрирующими являются такие звенья, у которых выходной сигнал пропорционален интегралу по времени от входного сигнала.
Звено считается заданным и определенным, если известна его передаточная функция или дифференциальное уравнение. Кроме того, звенья имеют временные и частотные характеристики.
Наличие нулевых корней в числителе или знаменателе ПФ типовых звеньев — это признак для разбиения последних на три группы:
Позиционные звенья: 1, 2, 3, 4, 5, — не имеют нулевых корней, и, следовательно, в области низких частот (т.е. в установившемся режиме), имеют коэффициент передачи равный k.
Интегрирующие звенья: 6, 7, 8, — имеют нулевой корень-полюс, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к бесконечности.
Дифференцирующие звенья: 9, 10 — имеют нулевой корень-ноль, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к нулю.
| 6.2. Типы объектов и законы регулирования |
В зависимости от величины самовыравнивания различают три типа объектов управления: устойчивый (с положительным самовыравниванием); нейтральный (с нулевым самовыравниванием); неустойчивый (с отрицательным самовыравниванием). Признаком отрицательного самовыравнивания является отрицательный знак перед самой выходной величиной в левой части дифференциального уравнения или появление отрицательного знака у свободного члена знаменателя передаточной функции (наличие положительного полюса).
Под законом регулирования (управления) понимается алгоритм или функциональная зависимость, определяющая управляющее воздействие u(t) на объект:
u(t) = F(Δ) , где Δ — ошибка регулирования.
Законы регулирования бывают:
— линейные: 
или  (3.1)
(3.1)
— нелинейные:  .
.
Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микро ЭВМ или микропроцессорных систем).
Наличие в (3.1) чувствительности регулятора к пропорциональной, к интегральным или к дифференциальным составляющим в первичной информации x(t), определяет тип регулятора:
1. P — пропорциональный;
2. I — интегральный;
3. PI — пропорционально интегральный (изодромный);
4. PD — пропорционально дифференциальный;
5. и более сложные варианты — PID, PIID, PIDD, .
Нелинейные законы регулирования подразделяются на:
1. функциональные;
2. логические;
3. оптимизирующие;
4. параметрические.
В составе структуры САУ содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления, путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U = f(Δ). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора. Закон регулирования определяет основные качественные и количественные характеристики систем.
| 6.4. Временные характеристики звеньев САУ |
Важнейшей характеристикой САР и её составных элементов являются переходные и импульсные переходные (импульсные) функции.
Аналитическое определение переходных функций и характеристик основано на следующих положениях. Если задана передаточная функция системы или отдельного звена W(р) и известен входной сигнал X(t), то выходной сигнал Y(t) определяется следующим соотношением:

Таким образом, изображение выходного сигнала  представляет собой произведение передаточной функции на изображение входного сигнала
представляет собой произведение передаточной функции на изображение входного сигнала  . Сигнал y(t) в явном виде получил после перехода от изображения к оригиналу y(t). Для большинства случаев линейных систем и составных элементов разработаны таблицы, позволяющие производить переход от изображений к оригиналу и обратно. В данном разделе представлена таблица 3.1 переходов для наиболее распространенных случаев.
. Сигнал y(t) в явном виде получил после перехода от изображения к оригиналу y(t). Для большинства случаев линейных систем и составных элементов разработаны таблицы, позволяющие производить переход от изображений к оригиналу и обратно. В данном разделе представлена таблица 3.1 переходов для наиболее распространенных случаев.
Так как изображение единичного ступенчатого воздействия равно 1/p, то изображение переходной функции определяется соотношением:
Следовательно, для нахождения переходной функции необходимо передаточную функцию разделить на p и выполнять переход от изображения к оригиналу.
Изображение единичного импульса равно 1. Тогда изображение импульсной функции определяется выражением:
Таким образом, передаточная функция является изображением импульсной функции.
Импульсная и переходная функции, как и передаточная функция, являются исчерпывающими характеристиками системы при нулевых начальных условиях. По ним можно определить выходной сигнал при произвольных входных воздействиях.
Таблица 3.1
Изображение по Лапласу и оригиналы
Изображение  | Оригинал f(t) |
 | |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
Передаточные функции и временные характеристики типовых звеньев приведены в таблице 3.2.
Таблица 3.2
Временные характеристики типовых звеньев
| Тип звена | Передаточные функции | Временные функции | |||
| Позиционные звенья | |||||
| Усилительное |  |  | |||
| Апериодическое 1-го порядка |  |  | |||
| Апериодическое 2-го порядка T1≥2T2 |  |  | |||
| Колебательное 0 jφ(ω) (3.2) , где Функция A(ω), представленная при изменении частоты от 0 до
Дата добавления: 2016-03-20 ; просмотров: 7272 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ Типовые динамические звенья и их характеристикиТиповые динамические звенья- это минимально необходимый набор звеньев для описания системы управления произвольного вида. Типы звеньев систем управления различаются по виду их передаточной функции (или дифференциального уравнения), определяющей все их динамические свойства и характеристики. Классификация основных типов динамических звеньев приведена на рис.3.9. Основные типы звеньев делятся на четыре группы: позиционные, интегрирующие, дифференцирующие и неминимально-фазовые [1,2]. Позиционные, интегрирующие и дифференцирующие звенья относятся к минимально-фазовым. Важным свойством минимально-фазовых звеньев является однозначное соответствие амплитудной и фазовой частотных характеристик. Другими словами, по заданной амплитудной характеристике всегда можно определить фазовую и наоборот. Позиционные звенья В звеньях позиционного, или статического типа, линейной зависимостью y = kx связаны выходная и входная величины в установившемся режиме. Коэффициент пропорциональности k между выходной и входной величинами представляет собой коэффициент передачи звена. Позиционные звенья обладают свойством самовыравнивания, то есть способностью самостоятельно переходить в новое установившееся состояние при ограниченном изменении входного воздействия. Безынерционное (идеальное усилительное) звено.Это звено не только в статике, но и в динамике описывается алгебраическим уравнением Амплитудно-фазовая частотная характеристика: W(jw) = k, A(w) = k, y(w) = 0. (3.16) Переходная и импульсная функции: h(t) = k1(t), w(t) = kd(t). (3.17) Безынерционное звено является некоторой идеализацией реальных звеньев. В действительности ни одно звено не в состоянии равномерно пропускать все частоты от 0 до ¥. Примерами таких безынерционных звеньев могут служить жесткая механическая передача, часовой редуктор, электронный усилитель сигналов на низких частотах и др. Апериодическое (инерционное) звено первого порядка.Уравнение и передаточная функция звена: (Tp+1) y(t) = x(t), где T — постоянная времени, характеризует степень инерционности звена, т.е. длительность переходного процесса. Амплитудно-фазовая частотная характеристика: W(jw) = Таким образом, апериодическое звено первого порядка является фильтром низких частот. Переходная и импульсная функции: h(t) = (1 — Примерами апериодического звена первого порядка могут служить RC цепочка, нагревательный элемент и др. Апериодическое (инерционное) звено второго порядка.Дифференциальное уравнение звена имеет вид причем предполагается, что 2Т2£ Т1. В этом случае корни характеристического уравнения вещественные и уравнение (3.21) можно переписать в виде: где Передаточная функция звена Из выражения (3.23) следует, что апериодическое звеновторого порядка можно рассматривать как комбинацию двух апериодических звеньев первого порядка. Примерами апериодического звена второго порядка могут служить двойная RC цепочка, электродвигатель постоянного тока и др. Колебательное звено.Описывается дифференциальным уравнением при Т1 2 p 2 +2xTp+1) y(t) = x(t), (3.25) где Т — постоянная времени, определяющая угловую частоту свободных колебаний l=1/Т; x — параметр затухания, лежащий в пределах 0 Амплитудно-фазовая характеристика совпадает с вещественной осью. При 0 1/T — с отрицательной полуосью. Временные характеристики соответствуют незатухающим колебаниям с угловой частотой 1/T. Интегрирующие звенья В звеньях интегрирующего типа линейной зависимостью Идеальное интегрирующее звено.Уравнение и передаточная функция имеют вид py(t) = x(t), Амплитудно-фазовая частотная характеристика: W(jw) = Переходная и импульсная функции: h(t) = t, w(t) = 1(t). (3.30) Такое звено является идеализацией реальных интегрирующих звеньев. Примерами идеальных интегрирующих звеньев могут служить операционный усилитель в режиме интегрирования, гидравлический двигатель, емкость и др. Дифференцирующие звенья В звеньях дифференцирующего типа линейной зависимостью Идеальное дифференцирующее звено.Уравнение и передаточная функция имеют вид y(t) = px(t), W(s) = s . (3.31) Амплитудно-фазовая частотная характеристика: W(jw) = jw, A(w) = w, y(w) = +90 0 . (3.32) Переходная и импульсная функции: h(t) = d(t), w(t) = Такое звено является идеализацией реальных дифференцирующих звеньев. Примерами идеальных дифференцирующих звеньев могут служить операционный усилитель в режиме дифференцирования, тахогенератор и др. Форсирующее (дифференцирующее) звено первого порядка.Дифференциальное уравнение и передаточная функция y(t) = (tp+1) x(t) , W(s) = ts+1, (3.34) где t — постоянная времени дифференцирования. Амплитудно-фазовая частотная характеристика: W(jw) = (jwt + 1), A(w)= Переходная и импульсная функции: h(t) = 1(t) + td(t), w(t) = d(t) + t Форсирующее (дифференцирующее) звено второго порядка.Уравнение и передаточная функция звена: y(t) = (t 2 p 2 +2xtp+1)x(t), W(s) = t 2 s 2 +2xts+1. (3.37) Амплитудно-фазовая частотная характеристика: W(jw) = (1-w 2 t 2 ) + j2xwt, A(w)= Переходная и импульсная функции: h(t) = t 2 источники: http://helpiks.org/7-47680.html http://megalektsii.ru/s44664t6.html |
 — модуль;
— модуль;  — аргумент частотной передаточной функции.
— аргумент частотной передаточной функции. получило название амплитудной частотной характеристики (АЧХ).
получило название амплитудной частотной характеристики (АЧХ).  раз. Верхняя полуплоскость л.а.х. соответствует значениям А>1 (усиление амплитуды), а нижняя полуплоскость — значениям А 0, r>0, T>0, 0
раз. Верхняя полуплоскость л.а.х. соответствует значениям А>1 (усиление амплитуды), а нижняя полуплоскость — значениям А 0, r>0, T>0, 0 Рис. 3.9. Классификация типовых динамических звеньев
Рис. 3.9. Классификация типовых динамических звеньев , (3.18)
, (3.18) ,
,  , y(w) = — arctgTw. (3.19)
, y(w) = — arctgTw. (3.19) ), w(t) =
), w(t) = 
 , (3.21)
, (3.21) — новые постоянные времени.
— новые постоянные времени. . (3.23)
. (3.23) , (3.24)
, (3.24) связаны в установившемся режиме производная выходной величины и входная величина. В этом случае для установившегося режима будет справедливым равенство
связаны в установившемся режиме производная выходной величины и входная величина. В этом случае для установившегося режима будет справедливым равенство  , откуда и произошло название этого типа звеньев.
, откуда и произошло название этого типа звеньев. . (3.28)
. (3.28) , A(w) =
, A(w) =  , y(w) = -90 0 . (3.29)
, y(w) = -90 0 . (3.29) связаны в установившемся режиме выходная величина и производная входной, откуда и произошло название этого типа звеньев.
связаны в установившемся режиме выходная величина и производная входной, откуда и произошло название этого типа звеньев. . (3.33)
. (3.33) , y(w) = arctg wt . (3.35)
, y(w) = arctg wt . (3.35) , y(w)=arctg
, y(w)=arctg  . (3.38)
. (3.38) +2xt
+2xt