Решение ОДУ в Matlab
Доброго времени суток! Сегодня мы поговорим о решении ОДУ (обыкновенных дифференциальных уравнений) в Matlab. Перед тем как мы начнём обсуждать данную тему, советую вам ознакомиться с темой: Численное дифференцирование в Matlab, чтобы лучше понимать теоретическую составляющую решения ОДУ.
Обыкновенные дифференциальные уравнения
С помощью дифференциальных уравнений можно описать разные задачи: движения системы, взаимодействующих материальных точек, химической кинетики и т.д. Различают три типа задач для систем диф. уравнений:
- Задача Коши
- Краевая задача
- Задача на собственные значения
Кратко расскажу о их сути:
Задача Коши предполагает дополнительные условия в виде значения функции в определённой точке.
Краевая задача подразумевает поиск решения на заданном отрезке с краевыми (граничными) условиями в концах интервала или на границе области.
Задача на собственные значения — помимо искомых функций и их производных, в уравнение входят дополнительное несколько неизвестных параметров, которые являются собственными значениями.
Методы решения дифференциальных уравнений
Решение ОДУ в Matlab и не только, в первую очередь, сводится к выбору порядка численного метода решения. Порядок численного метода не связан с порядком дифференциального уравнения. Высокий порядок у численного метода означает его скорость сходимости.
В случае большого интервала, с помощью алгоритмов с низким порядком сжимают интервал с решениями и находят приблизительные корни, а затем уже уточняют корни с помощью методов с высоким порядком.
Решение обыкновенных дифференциальных уравнений в Matlab можно реализовать «своими ручками», прописав алгоритм по разным схемам. Но также в Matlab есть встроенные функции, выполняющие все стандартные задачи.
Метод Рунге-Кутта первого порядка
Методы Рунге-Кутта представляют собой разложения в ряд Тейлора и от количества использованных элементов ряда зависит порядок этого метода. Следовательно, помимо Рунге-Кутта первого порядка, вы сможете увидеть методы других порядков. Иногда их называют другими именами.
Например, Метод Рунге-Кутта первого порядка, также известен как Метод Эйлера или Метод ломаных. Информацию о его математическом и графическом представлении советую поискать в гугл. Мы же поговорим о том, как Метод Рунге-Кутта первого порядка реализуется в Matlab для решения ОДУ. Например:
Решить и привести график ошибки уравнения y’ = y*x методом Рунге-Кутта первого порядка (Методом Эйлера, Методом ломаных).
Погрешность Метода Рунге-Кутта 1 порядка
» data-medium-file=»https://i2.wp.com/codetown.ru/wp-content/uploads/2017/02/Рунге-1-погрешность.png?fit=300%2C236&ssl=1″ data-large-file=»https://i2.wp.com/codetown.ru/wp-content/uploads/2017/02/Рунге-1-погрешность.png?fit=622%2C489&ssl=1″ loading=»lazy» src=»https://i2.wp.com/codetown.ru/wp-content/uploads/2017/02/%D0%A0%D1%83%D0%BD%D0%B3%D0%B5-1-%D0%BF%D0%BE%D0%B3%D1%80%D0%B5%D1%88%D0%BD%D0%BE%D1%81%D1%82%D1%8C.png?resize=622%2C489″ alt=»Погрешность метода 1 порядка» width=»622″ height=»489″ srcset=»https://i2.wp.com/codetown.ru/wp-content/uploads/2017/02/Рунге-1-погрешность.png?w=629&ssl=1 629w, https://i2.wp.com/codetown.ru/wp-content/uploads/2017/02/Рунге-1-погрешность.png?resize=300%2C236&ssl=1 300w» sizes=»(max-width: 622px) 100vw, 622px» data-recalc-dims=»1″ />
На данном графике показана зависимость величины ошибки от шага.
Метод Рунге-Кутта второго порядка
Также известен как Метод Эйлера-Коши. Как видите, во второй части уравнения происходит обращения к следующему шагу. Но как тогда быть, если нам ещё не известен следующий шаг? Всё просто. Метод Рунге-Кутта второго порядка — это всё тот же метод первого порядка, однако, на половине шага происходит нахождение «первичного» решения, а затем происходит его уточнение. Это позволяет поднять порядок скорости сходимости до двух.
Решить и привести график ошибки уравнения u’ = u*x методом Рунге-Кутта второго порядка.

По сравнению с Рунге-Куттом первого порядка изначальная ошибка уже гораздо меньше.
Мы не будем говорить о третьем порядке, потому что задачи на третий порядок встречаются редко, но если будет необходимо, пишите в комментариях, выложу.
Метод Рунге-Кутта четвёртого порядка
Метод Рунге-Кутта четвёртого порядка считается самым распространённым. Тем не менее, работает он аналогично второму и третьему порядку.
Решить и привести график ошибки уравнения u’ = u*x методом Рунге-Кутта четвёртого порядка.

Как видите, на последней картинке размерность ошибки на столько мала, что пришлось воспользоваться loglog() для лучшей видимости.
Решение ОДУ в Matlab стандартными средствами
Стоит отметить, что мы с вами разобрали только один самый известный метод решения ОДУ с разными порядками. Однако, методов очень много.
Для решения дифференциальных уравнений и систем в MATLAB предусмотрены следующие функции:
ode45 (f, interval, X0, [options])
ode23 (f, interval, X0, [options])
ode113 (f, interval, X0, [options])
ode15s (f, interval, X0, [options])
ode23s (f, interval, X0, [options])
ode23t (f, interval, X0, [options])
ode23tb (f, interval, X0, [options])
Входными параметрами этих функций являются:
- f — вектор-функция для вычисления правой части уравнения системы уравнений;
- interval — массив из двух чисел, определяющий интервал интегрирования дифференциального уравнения или системы;
- Х0 — вектор начальных условий системы дифференциальных уравнений;
- options — параметры управления ходом решения дифференциального уравнения или системы.
Все функции возвращают:
- массив Т — координаты узлов сетки, в которых ищется решение;
- матрицу X, i-й столбец которой является значением вектор-функции решения в узле Тi.
В функции ode45 реализован метод Рунге-Кутта 4-5 порядка точности, в функции ode23 также реализован метод Рунге-Кутта, но 2-3 порядка, а функция ode113 реализует метод Адамса.
Для решения жёстких систем предназначены функция ode15s, в которой реализован метод Гира, и функция ode23s, реализующая метод Розенброка. Для получения более точного решения жёсткой системы лучше использовать функцию ode15s. Для решения системы с небольшим числом жёсткости можно использовать функцию ode23t, а для грубой оценки подобных систем служит функция ode23tb.
Символьное решение обыкновенных дифференциальных уравнений произвольного порядка осуществляет функция dsolve r = dsolve(‘eq1,eq2,…’, ‘cond1,cond2,…‘, ‘v’)
Пример использования:
На этом мы закончим. Если остались вопросы, задавайте их в комментариях. Также вы можете скачать исходники чтобы лучше понять тему: «Решение ОДУ в Matlab».
Matlab решение дифференциальных уравнений 2 порядка
3 -е занятие по MATLAB
ЛАБОРАТОРНАЯ РАБОТА №3
Трехмерная графика в MATLAB .
Решение обыкновенных дифференциальных уравнений в MATLAB .
1. Элементарная трехмерная (3- D ) графика — функция plot 3.
Функция plot 3 в определенном смысле является аналогом функции plot . С помощью plot 3 формируется построение линии в трехмерном пространстве по заданным трем векторам .
Пример 1.1. Построение трехмерной пространственной спирали.
t =0:0.05:9* pi ; x =2* sin ( t ); y = cos ( t ); % t , x , y — вектора одинакового размера
xlabel( ‘о сь X’ ),ylabel( ‘ось Y’ ),zlabel( ‘ось Z-t’ )
title(‘ Пространственная спираль ‘)
% Сохранить программу в текстовом редакторе MATLAB, например, под именем sp3
% Поменять местами x, y, t в функции plot3
% Сменить начертание и цвет графика
% Добавить пояснение к начертанию в виде легенды — legend( ‘ звездочки ‘ )
%Установить следующий диапазон для t: t=-9*pi:0.05:9*pi;
% Пояснения к графику с помощью функций gtext для 3D-графики не применяются
Пример 1.2. Построение сферы по окружностям.
n=input(‘n=’); % Клавиатурный ввод числа n по запросу в командном окне
t2=(pi/2)*(-n:5:n)’/n ; % транспонированный вектор
E=ones(size(t1)); % матрица единиц размерности вектора t1
% Сохранить программу в текстовом редакторе MATLAB под именем sfera3 .
% Программу выполнить при различных значениях n .
% При n =100 изменить шаг в массивах t1 и t2 : для t1 и t2 одновременно: 3, 1, 10, 25, 50
% Для t1=50, для t2=1; для t1=1, для t2=50.
% Программу sfera3 выполнить без клавиатурного ввода, а для заданного числа n .
% Установить в программе различные цвета изображения сферы.
% Использовать различные коэффициенты для t1 и t2: pi/5, pi/10, pi/50, 2*pi, 5*pi одновременно
% и в сочетании с коэффициентом, равным pi (3.14), при одном из векторов ( t1 или t2).
2. Формирование прямоугольной сетки на плоскости — meshgrid .
% Результатом действия функции meshgrid является формирование «основания» в плоскости XOY для построения над этим основанием пространственной фигуры.
3. Построение пространственных сетчатых фигур — mesh.
Z = 1*x.* exp(-x.^2 — y.^2); % Коэффициент 1 заменить: 2, 5, 10, 20
% Для сравнения применить plot3(x,y,Z),grid вместо mesh(Z) .
R=sqrt(x.^2+y.^2)+0.001; %Коэфф. 0.001 введен для исключения деления на ноль
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Для сравнения применить plot3(x,y,Z),grid
4. Сетчатая поверхность с проекциями линий постоянного уровня — meshс.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
5. Сетчатая поверхность с пьедесталом плоскости отсчета на нулевом уровне— meshz.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
6. Построение пространственных сплошных фигур — surf.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
1. С плошная поверхность с проекциями линий постоянного уровня — surfс.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
8. Стандартные сферические поверхности — sphere .
8 .1. Сфера единичного радиуса — sphere ;
» sphere % равносильно sphere(20);
8.2 Формирование сферы с произвольным радиусом, например, равным 5;
% Выполнить построения с надписями
9. Пространственное распределение вероятностей Гаусса — peaks.
peaks; % По умолчанию формируются матрицы размера 49 ´ 49, по которым строится
%поверхность с пометками координат и титульной надписью ‘Peaks’.
peaks, title(‘Gauss’); % Со специальной титульной надписью
peaks(78); % Размерность матриц построения 78 ´ 78
peaks(25); % Размерность матриц построения 25 ´ 25
z=peaks; surf(z); % Построение поверхности Гаусса по заданной 49 ´ 49 матрице z.
% Сравнить с поверхностью на основе функции mesh(z)
% Сравнить с функцией mesh(z)
z=3*peaks(78); surf(z), title(‘Gauss’) % С множителем по оси Z .
% Применить множители: 4, 10, 33, 50
Пример 9.3. Цветовые массивные уровни на плоскости от распределения Гаусса.
[X,Y,Z]=peaks; pcolor(7*X,12*Y,20*Z),title(‘Цвет’) % С расширенной %областью определения на плоскости XOY — множители 7 и 12 и с изменением по Z — коэф-
Пример 9.4. Распределение Гаусса с задаваемой областью определения на плоскости XOY.
% Функция pcolor позволяет наблюдать обл а сть определения в плоскости XOY
% Изменить шаг по x и y : 0.2, 0.1, 0.5
% Изменить границы по x и y одновременно и порознь :(-7:0.2:3),(-7:0.2:1),(-7:0.2:-1),(-7:0.2:-3)
Пример 9.5. Линии уровня трехмерной поверхности — contour.
% Линии уровня без учета масштаба плоскости XOY:
contour(peaks),grid,title(‘ Линии уровня ‘) % 10 линий уровня по умолчанию
contour(peaks,4),grid,title(‘ Линии уровня ‘) % 4 линии уровня
contour(peaks,10),grid,title(‘ Линии уровня ‘) % 10 лини q уровня
contour(peaks,15),grid,title(‘ Линии уровня ‘) % 15 лини q уровня
contour(peaks,25),grid,title(‘ Линии уровня ‘) % 25 лини q уровня
% Применить функцию contour для стандартной сферической поверхности sphere с различным числом линий уровня.
Пример 9.6. Линии уровня с учетом масштаба плоскости XOY (два примера):
Пример 9.7. Линии уровня с учетом масштаба плоскости XOY и заданным числом (три примера):
Пример 9.7. Линии уровня с цветовой окраской плоскости XOY — contourF.
contourF(peaks),title(‘Цвет линий уровня’)
Пример 9.8. «Пространственные» линии уровня — contour3.
contour3(peaks,25),title(’25 л иний уровня в пространстве ‘)
Пример 9.9. Обзор поверхности из заданной точки пространства — view.
peaks,view(10,45); % Число 10 — азимут обзора, 45 — угол обзора (все в градусах)
[X,Y]=meshgrid(-7:0.3:7,-5:0.3:5);Z=peaks(X,Y);surf(Z), view( — 10,45)
% Задать различные параметры функции view и выполнить построение различных поверхностей.
10. Пострение поверхностей относительно полярной системы координат.
Z=peaks(x1,y1);surf(x1,y1,Z),title(‘ Полярная плоскость ‘)
% С изменением точки обзора
Z=peaks(x1,y1);surf(x1,y1,Z),title(‘ Полярная плоскость ‘),view(-12,45)
11. Построение цилиндрических поверхностей — cylinder.
cylinder % Построение цилиндра без параметров, по умолчанию
cylinder(40) % Построение цилиндра с заданным размером плоскости XOY
cylinder(40,60) % Цилиндр с заданным размером плоскости XOY и числом образующих %граней — 60
% Построение совокупности цилиндрообразующих поверхностей
[x,y,z]=cylinder([5 0],160); surf(x,y,z) % Конус по заданному вектору [5,0]
[x,y,z]=cylinder([5 0 5],160); surf(x,y,z) % 2 к онуса
[x,y,z]=cylinder([5 0],3); surf(x,y,z) % Пирамида
[x,y,z]=cylinder([5 0 5],3); surf(x,y,z) % 2 пиирамиды
[x,y,z]=cylinder([5 12 12],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 5],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 12 5],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 5 12 5 12],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 12 5 18],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 12 5 5 18 18],100); surf(x,y,z)
% Построение совокупности цилиндрообразующих поверхностей с масштабированием
[x,y,z]=cylinder([5 12 12 5 5 18 18],100); surf(x,y,20*z)
plot(x,20*z),grid % Масштаб плоскости XOZ
plot(7*x,y),grid % Масштаб плоскости XOY
plot(7*x,13*y),grid % Масштаб плоскости XOY
Решение обыкновенных дифференциальных уравнений в MATLAB.
Для решения обыкновенных дифференциальных уравнений (ODE) могут быть применены численные методы, которые в MATLAB реализованы в специальных функциях-решателях: ode45, ode23, ode113 .
Общий порядок программирования:
1) Создается М-функция с описанием правых частей дифференциальных уравнений;
2) Создается М-сценарий с выбранным решателем;
Пример 1. Решить следующую систему обыкновенных дифференциальных уравнений с заданными начальными условиями:

% Программа решения примера 1
% Создаем М-функцию под именем dif31.m
% Создаем М-сценарий под именем ddd45_31.m
% Сценарий решения с помощью ode45
T=[0 15]; % Интервал интегрирования
x0=[10;5]; % Начальные условия
[t,x]=ode45(‘dif31’,T,x0); %t, x — выходные переменные решателя ode45
plot(t,x),grid,title(‘ Пример 3.1 ‘),legend(‘X1′,’X2’)
% Изменить начальные условия: 
% Изменить интервал интегрирования: от 0 до 20, от 0 до 7.
% Вывести графические результаты с различным начертанием координат
% Прменить решатели ode23, ode113 . Сравнить результаты покоординатно, для чего вывести результаты решения и свести их в таблицу, например, в WORD .
Пример 2. Решить следующую систему линейных дифференциальных уравнений с заданными начальными условиями:

% Создаем М-функцию с именем dif32.m
function f=dif32(t,x); % t, x — входные переменные для М-функции
%Создаем М-сценарий под именем ddd45_32
% Сценарий решения примера 2
x0=[0;0;0]; % x0 — вектор начальных условий
% Изменить интервал интегрирования
% Изменить начальные условия
% Вывести графические результаты с различным начертанием координат
% Использовать решатели ode23, ode113 .
Пример 3. Уравнение Ван-дер-Поля.

Для решения дифференциального уравнения 2-го порядка сначала приведем его к системе дифференциальных уравнений 1-го порядка:

где 
% Создаем М-функцию под именем van33.m
%Создаем М-сценарий под именем ddd45_33
plot(t,X),grid,title(‘ Ур-е Ван-дер-Поля ‘ ), legend(‘X1′,’X2’)
% Изменить интервал интегрирования
% Изменить начальные условия ( только все нулевые не должны быть)
% Изменить множитель в уравнении (вместо 2)
% Вывести графические результаты с различным начертанием координат
% Использовать решатели ode23, ode113 .
Пример 4. Интегрирование дифференциальных уравнений с выводом результатов в заданн ом диапазоне точек независимого переменного. Видоизменим пример 2 в сценарии задания интервала интегрирования.
% Сценарий решения примера 4
T=[0:1:6,7:2:18]; % от 0 до 6 шаг 1, от 7 до 18 шаг 2
Пример 5. Интегрирование дифференциальных уравнений с выводом результатов в заданных точках независимого переменного. Видоизменим пример 2 в сценарии задания интервала интегрирования.
% Сценарий решения примера 5
T=[0 0.5 1 1.5 3 4 8]; 7 точек переменного t
Задание к примерам 1-5: произвести графический вывод координат каждой в отдельности
Пример 6. Интегрирование систем линейных дифференциальных уравнений в матричном виде, т.е.
 (6.1)
(6.1)
где  — вектор переменных состояния размера n ´ 1,
— вектор переменных состояния размера n ´ 1,  — вектор входного воздействия размера rx1,
— вектор входного воздействия размера rx1,  — матрицы чисел размера n ´ n, n ´ r, соответственно .
— матрицы чисел размера n ´ n, n ´ r, соответственно .
% Матрицы  и
и  берем из примера 2
берем из примера 2
% Создаем М-функцию под именем syst36.m
A=[-3,0,0;1,-2,0;0,4,-1]; % Матрица А размера 3 ´ 3
B=[10 0 0;0 0 0;0 0 0]; % Матрица B размера 3 ´ 3
u=[1;1;1]; % Входное воздействие размера 3 ´ 1
ds36=A*x+B*u; % Описание правой части матричного дифференциального уравнения (6.1)
% Создаем М-сценарий под именем ddd45_36
% Сценарий решения примера 3.6
plot(t,x),grid,title(‘ Система ур-й 3-го порядка ‘),
Задание к примеру 6:
% Решить систему с двумя воздействиями, с одним воздействием
% Вывести графические результаты с различным начертанием координат
% Вывести графические результаты с по отдельным координатам
% Создать программу решения системы дифференциальных уравнений 4-го порядка
% Использовать решатели ode23, ode113 .
Решение обыкновенных дифференциальных уравнений
с заданной точностью и с параметрами.
Решатели дифференциальных уравнений по умолчанию производят численное интегрирование с относительной погрешностью  и вектором абсолютной погрешности со значением
и вектором абсолютной погрешности со значением  по всем компонентам вектора.
по всем компонентам вектора.
1. Установление заданной относительной погрешности RelTol — ODESET( odeset) .
С помощью установления относительной погрешности RelTol контролируется количество «правильных» цифр в решении дифференциального уравнения в соответствии с общей записью  , где показатель степени P есть число контролируемых цифр в решении.
, где показатель степени P есть число контролируемых цифр в решении.
Пример1. Уравнение Ван-дер-Поля с заданной относительной погрешностью.
С помощью функции ODESET задаются опции решателя дифуравнений с помощью соответствующих строковых символов, которых всего может быть 18. Перечень строковых символов функции ODESET можно просмотреть из командной строки, набрав в ней ODESET
% Сформируем М-функцию для описания правых частей дифференциальных уравнений
% Сохрани ть под именем van33
% Создадим М-сценарий решения на основе ode23 и с относительной погрешностью, равной
% d1= 0.1 и d2=0.0001
% М-сценарий сохранить под именем ret71.
% Формат записи функции odeset включает строковый служебный символ RelTol и задаваемую %величину относительной погрешности (0.1 для d1 и 0.2 для d2).
% d1 и d2 подставляются в соответствующие решатели ( ode23).
Задание к примеру 1:
— выполнить с ode45, ode113;
— изменить коэффициент в М-функции van33 : 0.3, 2.3;
— изменить для d1 относительную погрешность: 1, 0.5, 0.1, 0.01, 0.001, 0.0001 (для ode23).
Пример 2. Анализ нелинейной тест-системы с задаваемой относительной погрешностью вычислений в решателях MATLAB.

где  — постоянные действительные числа.
— постоянные действительные числа.
2.1. Проинтегрируем тест-систему с коэффициентами  и с относительной погрешностью, равной 0.1, 0.01, 0.001, 0.4, 0.3, 0.2
и с относительной погрешностью, равной 0.1, 0.01, 0.001, 0.4, 0.3, 0.2
% Создадим М-функцию под именем dif21
% Создадим М-сценарий под именем syst21
% Введем относительную погрешность 0.1
% В сценарии применим функцию odeset
% Проанализировать тест-систему по 2-й и 3-й координатам.
% Для графического вывода результатов по 2-й координате следует ввести plot в виде
%% Для графического вывода результатов по 3-й координате следует ввести plot в виде
% Проанализировать тест-систему с относительной погрешностью, равной 0.01, 0.4, 0.3, 0.2
% Проанализировать тест-систему с помощью решателей ode45, ode113 , сравнить результаты.
2. Задание абсолютной погрешности — AbsTol .
Абсолютная погрешность AbsTol контролирует разницу между ожидаемым решением и его действительным значением. AbsTol начинает проявляться, когда компонента (координата) решения становится неожидаемо большой. Влияние AbsTol зависит также от интервала и масштаба интегрирования. По умолчанию решатели дифференциальных уравнений Matlab устанавливают величину абсолютной погрешности, равную  .
.
Пример3. Уравнение Ван-дер-Поля с заданной абсолютной погрешностью — ‘AbsTol’ .
% Используем имеющую М-функцию описания уравнения Ван-дер-Поля — van33
% Создадим М-сценарий ( присвоить имя) с задаваемой абсолютной погрешностью по всем координатам и по %одной из возможных
a1=odeset(‘AbsTol’,0.5); % Скаляр 0.1 по всем координатам
% Задание избирательной абсолютной погрешности осуществляется с помощью вектора в виде :
% По первой координате погрешность равна 0.5, по 2-й — 0.000001
% В целом сценарий (присвоить имя) должен иметь вид
% Поскольку система уравнений Ван-дер-Поля имеет взаимозависимые координаты, то интегрирование осуществляется практически с наименьшей погрешностью, т.е. с 0.000001
Задание к примеру 3.
— Применить скаляр абсолютной погрешности: 0.3, 0.1, 0.01.
— Вывести график по 2-й координате.
3. Интегрирование дифференциальных уравнений с параметрами.
Пример 4. Проинтегрировать однородную систему нелинейных дифференциальных уравнений с четырьмя параметрами k1, k2, k3, a:

при следующих начальных условиях: 
Целью является анализ решений при различных параметрах, входящих в систему.
% Создадим М-функцию под именем dif44 с ключевым словом flag
switch flag % Начало процедуры описания правых частей дифуравнений
case » % Состояние flag с опциями по умолчанию
end % Окончание описания правых частей дифуравнений с опциями по умолчанию
% Создадим М-сценарий под именем syst44 для решателя ode23 c опциями по умолчанию
% и введения параметров
x0=[0;1;-1]; % Вектор начальных условий
tt=[0,25]; % Интервал интегрирования
k1=input(‘k1=’)%2.333; % Можно также k1=2.333;
k2=input(‘k2=’)%-0.7789; % Можно также k2=-0.7789;
k3=input(‘k3=’)%-0.7888; % Можно также k3=-0.7888;
a=input(‘a=’)%-0.1; % Можно также a=-0.1;
plot(t,x),grid,title(‘ Система с параметрами ‘), legend( ‘x1’ , ‘x2’ , ‘x3’ )
% В записи функции ode23 символ [ ] указывает на опции ( RelTol, AbsTol и др.), принятые по %умолчанию
Задание к примеру 4.
— Изменить параметр k1: 2, 1, 0.5, 0.2; ( остальные исходные) ;
— Изменить параметр k2: -0.111, -0.333,-0.555,0.7789 ( остальные исходные) ;
— Изменить параметр k3: -1.333, -0.333, -0.666, 0.7888 ( остальные исходные) ;
— Изменить параметр a: -1, 1, 0, 0.5 ( остальные исходные) ;
Произвести интегрирование системы при:
Пример 5. Интегрирование систем с циклическим изменением параметра.
% Используем М-функцию dif55
% Видоизменим М-сценарий syst66 так, чтобы программно изменялся какой-либо параметр (например, k3) и происходило наложение графиков решения по заданной координате (например, по  ). Новый М-сценарий будет с именем syst77.
). Новый М-сценарий будет с именем syst77.
if i==-0.51 % Двойное равенство соответствует логической истине
plot(t,x(:,2),’r’),title(‘ Система с циклическим параметром ‘ )
k3=i; % Без точки с запятой (;) выводятся значения k3
Задание к примеру 5.
— Расширить диапазон изменения параметра k3;
— Написать программу с изменением параметра k2 ;
— Написать программу с графическим выводом всех координат системы при k3=0.51 и только координаты при остальных значениях параметра k3 .
Matlab решение дифференциальных уравнений 2 порядка
Дифференциальные уравнения и системы уравнений
Для решения дифференциальных уравнений и систем в MATLAB предусмотрены следующие функции ode45(f, interval, X0 [, options]), ode23(f, interval, X0 [, options]), ode113(f, interval, X0 [, options]), odel5s(f, interval, X0 [, options]), ode23s(f, interval, X0 [, options]), ode23t (f, interval, X0 [,options]) и ode23tb(f, interval, X0 [, options]).
Входными параметрами этих функций являются:
- f — вектор-функция для вычисления правой части уравнения системы уравнений
- interval — массив из двух чисел, определяющий интервал интегрирования дифференциального уравнения или системы;
- Х0 — вектор начальных условий системы дифференциальных систем
- options — параметры управления ходом решения дифференциального уравнения или системы.
Все функции возвращают:
- массив Т — координаты узлов сетки, в которых ищется решение;
- матрицу X, i-й столбец которой является значением вектор-функции решения в узле Тi
В функции ode45 реализован метод Рунге-Кутта 4-5 порядка точности, в функции ode23 также реализован метод Рунге-Кутта, но 2-3 порядка, а функция ode113 реализует метод Адамса.
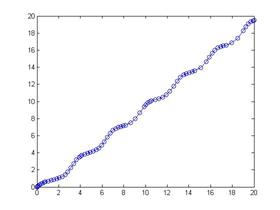
В М-файле с именем pr 7. m пишем:
Потом в командном окне вызываем функцию ode113:
ode113(@pr7,[0 20],0) %Метод Адамса: @ pr 7 – ссылка на М-функцию, [0 20]- интервалы интегрирования,0 — условие: y(0)=0
Результатом будет график:
Необходимо реализовать метод Рунге-Кутта 4 порядка и решить задачу Коши для предложенной системы дифференциальных уравнений:

В М-файле с именем pr 8. m пишем:
Потом в командном окне вызываем функцию ode 45:
http://apeshnik.narod.ru/matlab/part3.htm
http://solidstate.karelia.ru/p/tutorial/meth_calc/files/matlab4.shtml