Механические колебания. Свободные и вынужденные колебания. Резонанс. Превращение энергии …
 Механические колебания – это движения, которые точно или приблизительно повторяются через определенные интервалы времени. (например, колебание ветки на дереве, маятника часов, автомобиля на рессорах и так далее)
Механические колебания – это движения, которые точно или приблизительно повторяются через определенные интервалы времени. (например, колебание ветки на дереве, маятника часов, автомобиля на рессорах и так далее)
Колебания бывают свободными и вынужденными.
Колебания, возникающие в системе под действием внутренних сил, называются свободными . Все свободные колебания затухают. (например: колебание струны, после удара)
Колебания, совершаемые телами под действием внешних периодически изменяющихся сил, называются вынужденными (например: колебание металлической заготовки при работе кузнеца молотом).
Условия возникновения свободных колебаний :
- При выведении тела из положения равновесия в системе должна возникнуть сила, стремящаяся вернуть его в положение равновесия;
- Силы трения в системе должны быть очень малы (т.е. стремиться к нулю).
 В реальных колебательных системах всегда происходят потери энергии при свободных колебаниях. Механическая энергия расходуется на совершение работы по преодолению сил сопротивления воздуха. Под влиянием силы трения происходит уменьшение амплитуды колебаний, затем колебания прекращаются. Колебания, энергия которых уменьшается с течением времени за счет действия сил сопротивления, называются затухающими.
В реальных колебательных системах всегда происходят потери энергии при свободных колебаниях. Механическая энергия расходуется на совершение работы по преодолению сил сопротивления воздуха. Под влиянием силы трения происходит уменьшение амплитуды колебаний, затем колебания прекращаются. Колебания, энергия которых уменьшается с течением времени за счет действия сил сопротивления, называются затухающими.
 Вынужденные колебания являются незатухающими. Поэтому необходимо восполнять потери энергии за каждый период колебаний. Вынужденные колебания совершаются с частотой, равной частоте изменения внешней силы.
Вынужденные колебания являются незатухающими. Поэтому необходимо восполнять потери энергии за каждый период колебаний. Вынужденные колебания совершаются с частотой, равной частоте изменения внешней силы.
Любое колебание характеризуется:
- Xm (А)– модуль максимального смещения точки от положения равновесия называется амплитудой (м);
- T – время одного полного колебания называется периодом (с);

- Число колебаний в единицу времени называется частотой (ν):
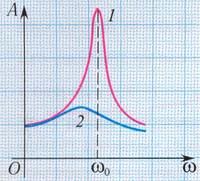
Резонанс – это явление резкого возрастания амплитуды вынужденных колебаний при совпадении частоты изменения внешней силы, действующей на систему, с частотой свободных колебаний ( ).
).
 Явление резонанса учитывается в акустике, радиотехнике и технике. В строительстве, например, при сооружении мостов и других сооружений, которые подвержены механическим колебаниям и действию внешней силы.
Явление резонанса учитывается в акустике, радиотехнике и технике. В строительстве, например, при сооружении мостов и других сооружений, которые подвержены механическим колебаниям и действию внешней силы.
Существует несколько колебательных систем – математический маятник (шарик на тонкой длинной нити) и пружинный маятник (тело на пружине).
Самый простой вид колебательного движения — гармонические колебания, при которых физическая величина периодически изменяется со временем по закону синуса или косинуса (рис.).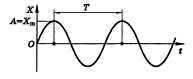 При гармонических колебаниях периодически происходит переход потенциальной энергии в кинетическую и обратно :
При гармонических колебаниях периодически происходит переход потенциальной энергии в кинетическую и обратно :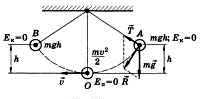
… Екин → Ер → Екин →…
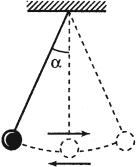
На примере колебаний тела на нити видим превращение энергии. В 1 положении наблюдаем равновесие колебательной системы. Скорость и, следовательно, кинетическая энергия тела максимальны. При отклонении маятника от положения равновесия он поднимается на высоту h относительно нулевого уровня, следовательно, в точке А маятник обладает потенциальной энергией Ер. При движении к положению равновесия, к точке О, уменьшается высота до нуля, а скорость груза увеличивается, и в точке О вся потенциальная энергия Ер превратится в кинетическую энергию Екин. В положении равновесия кинетическая энергия имеет максимальное значение, а потенциальная энергия минимальна. После прохождения положения равновесия по инерции происходит превращение кинетической энергии в потенциальную, скорость маятника уменьшается и при максимальном 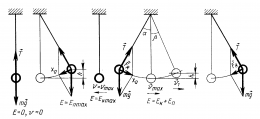 отклонении от положения равновесия становится равной нулю. Екин = 0, Ер = max
отклонении от положения равновесия становится равной нулю. Екин = 0, Ер = max
Закон сохранения механической энергии: сумма кинетической и потенциальной энергий остается неизменной: Екин = Ер = const
Вынужденные колебания. Резонанс. Автоколебания
Если колебания совершаются под воздействием внешней силы, они называются вынужденными. Работа внешней силы, которая обеспечивает колебательную систему энергией, при этом является положительной. Благодаря ей колебания не затухают и могут противодействовать силам трения.
Внешняя сила не обязательно должна быть постоянной. С течением времени она может изменяться по разным законам. Особый случай – воздействие на колебательную систему внешней силы, которая изменяется по гармоническому закону с частотой, равной ω , в то время как сама система совершает собственные колебания с той же самой частотой.
Установившиеся вынужденные колебания всегда происходят с частотой внешней силы. Частоту свободных колебаний определяют параметры системы.
Когда внешняя сила начинает воздействовать на колебательную систему, должно пройти некоторое время Δ t , прежде чем вынужденные колебания установятся. Это время будет равно тому времени τ , за которое затухают свободные колебания в данной системе.
В момент начала воздействия в системе начинают происходить два процесса одновременно – свободные колебания с собственной частотой ω 0 и вынужденные с частотой ω . Однако из-за сил трения свободные колебания в определенный момент затухают, поэтому по прошествии времени в системе сохраняются лишь стационарные колебания с той частотой, которая соответствует внешней (вынуждающей) силе.
Разберем пример. У нас есть тело на пружине, совершающее вынужденные колебания (см. иллюстрацию ниже). Приложим внешнюю силу, обозначенную F → в н , к свободному концу пружины, после чего этот конец начнет перемещаться по закону, выражаемому формулой:
Здесь буквой ω обозначена круговая частота, а y m – амплитуда колебаний.
Перемещения такого рода обеспечиваются шатунным механизмом, который преобразует круговые движения в возвратно-поступательные.
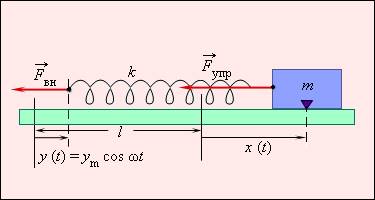
Рисунок 2 . 5 . 1 . Груз на пружине, совершающий вынужденные колебания. Перемещение свободного конца выражено формулой y = y m cos ω t , где l означает длину недеформированной пружины, а k –ее жесткость.
При смещении левого конца пружины на некоторое расстояние y и правого – на x по сравнению с первоначальным положением недеформированной пружины будет происходить ее удлинение. Найти величину этого удлинения можно по следующей формуле:
∆ l = x — y = x — y m cos ω t .
В таком случае мы можем переформулировать второй закон Ньютона для этого случая следующим образом:
m a = — k ( x — y ) = — k x + k y m cos ω t .
Здесь сила, которая действует на тело, показана как сумма двух слагаемых, первым из которых является упругость, стремящаяся к равновесию тела, а вторым – внешнее воздействие, совершающееся с определенными интервалами. Внешнюю силу также называют вынуждающей.
Теперь выразим эту зависимость в строгой математической формуле, учитывающей связь между координатой тела a = x ¨ и его ускорением. У нас получится следующее:
x ¨ + ω 0 2 x = A cos ω t .
Эта зависимость называется уравнением внешних колебаний. Здесь ω 0 = k m является собственной круговой частотой свободного колебания, а ω – циклической частотой внешней (вынуждающей) силы.
Чтобы найти величину A для вынужденного колебания груза на пружине, нужно воспользоваться следующей формулой:
A = k m y m — ω 0 2 y m .
То уравнение, что мы записали перед этим, не учитывает, что на тело действуют также и силы трения. В уравнении вынужденных колебаний, в отличие от уравнения свободных, учитываются сразу обе частоты – частота вынуждающей силы и частота свободных колебаний.
Вынужденные колебания груза на пружине, которые устанавливаются со временем, имеют частоту внешнего воздействия. Это определяется следующим законом:
x ( t ) = x m cos ( ω t + θ ) .
Здесь x m обозначает амплитуду вынужденного колебания, а буква θ – его начальную фазу. Значения обоих этих показателей будут зависеть от амплитуды внешней силы и соотношения частот.
Если частоты очень низкие, т.е. ω ≪ ω 0 , то тело, прикрепленное к правому концу пружины, движется точно так же, как и левый конец этой пружины. Тогда получается, что x ( t ) = y ( t ) . Сама пружина при этом практически не деформируется, а модуль внешней силы F → в н , приложенной к ее левому концу, стремится к нулю. Работа при этом не совершается.
Понятие резонанса
Резонанс – это резкое возрастание амплитуды вынужденных колебаний при сближении частоты внешней силы с собственной частотой колебания тела.
С помощью резонансной кривой (резонансной характеристики) можно описать зависимость, существующую между амплитудой внешних колебаний x m и частотой вынуждающей силы ω .
Когда происходит резонанс, амплитуда x m может оказаться значительно больше, чем амплитуда колебаний левого (свободного) конца пружины.. Если мы не будем учитывать силы трения, то получится, что при резонансной частоте амплитуда вынужденных колебаний будет возрастать неограниченно. В реальности она будет зависеть от следующего условия: работа внешней силы в течение всего времени колебаний должна совпадать с потерями механической энергии, происходящими из-за трения. При уменьшении трения (и, соответственно, повышении добротности Q колебательной системы) амплитуда вынужденных колебаний при резонансе возрастет.
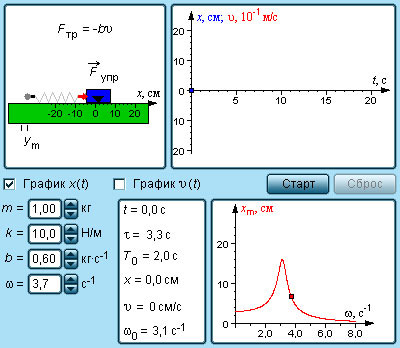
Рисунок 2 . 5 . 2 . Моделирование вынужденных колебаний.
Если добротность колебательной системы невысока (менее 10 ), то частота резонанса будет находиться ближе к низким частотам. Это показано на иллюстрации 2 . 5 . 2 .
Явление резонанса имеет большое практическое значение. Именно из-за него зачастую разрушаются здания, мосты и другие сооружения. Это происходит в тот момент, когда их собственные частоты совпадают с частотой внешней силы, например, колебаниями мотора.
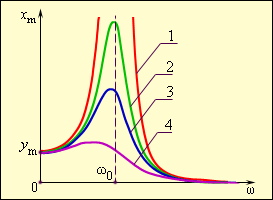
Рисунок 2 . 5 . 3 . Изображение затухания различных колебаний при помощи резонансных кривых: 1 — условная система без учета трения (бесконечное возрастание амплитуды вынужденных колебаний), 2 , 3 , 4 – резонансные колебания в реальных условиях, происходящих в системах разной степени добротности ( Q 2 > Q 3 > Q 4 ) . Если частоты низкие, то ( ω ≪ ω 0 ) x m ≈ y m , а если высокие, то ( ω ≫ ω 0 ) x m → 0 .
Вынужденные колебания являются незатухающими. При трении неизбежно теряется часть энергии, однако воздействие внешних периодически действующих сил компенсирует ее.
Что такое автоколебательные системы
Автоколебательные системы – это системы, в которых могут возникать незатухающие колебания безотносительно внешнего воздействия, а лишь за счет способности самостоятельно регулировать подвод энергии от внешнего источника. Процесс колебаний в таких системах называют автоколебаниями.
Внутри этой системы можно выделить три составляющих – саму систему, источник внешней постоянной энергии и обратную связь между ними. Первым элементом выступает любая механическая система, которая может совершать затухающие колебания, например, часовой маятник. В качестве источника можно использовать потенциальную энергию груза в поле тяжести или энергию деформации пружины. Система обратной связи – это, как правило, особый механизм, функцией которого является регулирование поступлений энергии. На иллюстрации показано, как эти компоненты взаимодействуют между собой.
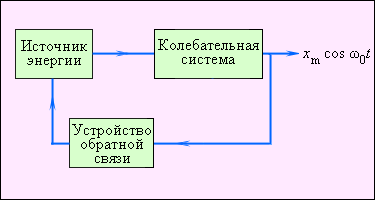
Рисунок 2 . 5 . 4 . Автоколебательная система со всеми основными составляющими.
Какие можно привести примеры таких систем? Ярким примером является часовой механизм с так называемым анкерным ходом. В нем есть ходовое колесо с косыми зубчиками, прочно сцепленное с зубчатым барабаном, через который перекинута цепочка с грузом. В верхней части маятника закреплен якорек (анкер), состоящий из двух твердых пластинок, дугообразно изогнутых по окружности с центром на основной оси. В механизме ручных часов вместо гири используется пружина, а вместо маятника – маховичок-балансир, соединенный со спиральной пружиной, который совершает круговые колебания вокруг своей оси. В качестве источника внешней энергии выступает заведенная пружина или поднятая гиря. Обратная связь осуществляется с помощью анкера: он позволяет ходовому колесу совершать поворот только на один зубец за полупериод. Когда анкер взаимодействует с ходовым колесом, происходит передача энергии. Когда маятник колеблется, зубец ходового колеса передает анкерной вилке энергию по направлению движения маятника, и именно этим компенсируются силы трения. Таким образом, энергия поднятой гири или заведенной пружины поступает маленькими порциями к маятнику.
Существует также много других автоколебательных систем, которые широко применяются в технике. Автоколебания происходят внутри двигателей внутреннего сгорания, паровых машин, электрических звонков, музыкальных инструментов, голосовых связок и т.д.

Рисунок 2 . 5 . 5 . Схема маятникового часового механизма.
Механические колебания и волны

Механические колебания – периодически повторяющееся перемещение материальной точки, при котором она движется по какой-либо траектории поочередно в двух противоположных направлениях относительно положения устойчивого равновесия.
Отличительными признаками колебательного движения являются:
- повторяемость движения;
- возвратность движения.
Для существования механических колебаний необходимо:
- наличие возвращающей силы – силы, стремящейся вернуть тело в положение равновесия (при малых смещениях от положения равновесия);
- наличие малого трения в системе.
Механические волны – это процесс распространения колебаний в упругой среде.
Виды волн
- Поперечная – это волна, в которой колебание частиц среды происходит перпендикулярно направлению распространения волны.
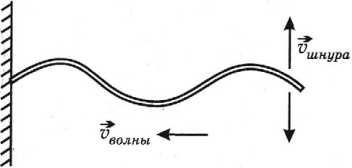
Поперечная волна представляет собой чередование горбов и впадин.
Поперечные волны возникают вследствие сдвига слоев среды относительно друг друга, поэтому они распространяются в твердых телах.
- Продольная – это волна, в которой колебание частиц среды происходит в направлении распространения волны.
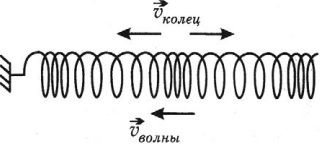
Продольная волна представляет собой чередование областей уплотнения и разряжения.
Продольные волны возникают из-за сжатия и разряжения среды, поэтому они могут возникать в жидких, твердых и газообразных средах.
Важно!
Механические волны не переносят вещество среды. Они переносят энергию, которая складывается из кинетической энергии движения частиц среды и потенциальной энергии ее упругой деформации.
Гармонические колебания
Гармонические колебания – простейшие периодические колебания, при которых координата тела меняется по закону синуса или косинуса:

где \( x \) – координата тела – смещение тела от положения равновесия в данный момент времени; \( A \) – амплитуда колебаний; \( \omega t+\varphi_0 \) – фаза колебаний; \( \omega \) – циклическая частота; \( \varphi_0 \) – начальная фаза.
Если в начальный момент времени тело проходит положение равновесия, то колебания являются синусоидальными.
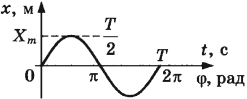
Если в начальный момент времени смещение тела совпадает с максимальным отклонением от положения равновесия, то колебания являются косинусоидальными.
Скорость гармонических колебаний
Скорость гармонических колебаний есть первая производная координаты по времени:

где \( v \) – мгновенное значение скорости, т. е. скорость в данный момент времени.
Амплитуда скорости – максимальное значение скорости колебаний, это величина, стоящая перед знаком синуса или косинуса:

Ускорение гармонических колебаний
Ускорение гармонических колебаний есть первая производная скорости по времени:

где \( a \) – мгновенное значение ускорения, т. е. ускорение в данный момент времени.
Амплитуда ускорения – максимальное значение ускорения, это величина, стоящая перед знаком синуса или косинуса:

Если тело совершает гармонические колебания, то сила, действующая на тело, тоже изменяется по гармоническому закону:
где \( F \) – мгновенное значение силы, действующей на тело, т. е. сила в данный момент времени.
Амплитуда силы – максимальное значение силы, величина, стоящая перед знаком синуса или косинуса:
Тело, совершающее гармонические колебания, обладает кинетической или потенциальной энергией:
где \( W_k \) – мгновенное значение кинетической энергии, т. е. кинетическая энергия в данный момент времени.
Амплитуда кинетической энергии – максимальное значение кинетической энергии, величина, стоящая перед знаком синуса или косинуса:
При гармонических колебаниях каждую четверть периода происходит переход потенциальной энергии в кинетическую и обратно.
В положении равновесия:
- потенциальная энергия равна нулю;
- кинетическая энергия максимальна.
При максимальном отклонении от положения равновесия:
- кинетическая энергия равна нулю;
- потенциальная энергия максимальна.
Полная механическая энергия гармонических колебаний
При гармонических колебаниях полная механическая энергия равна сумме кинетической и потенциальной энергий в данный момент времени:
Важно!
Следует помнить, что период колебаний кинетической и потенциальной энергий в 2 раза меньше, чем период колебаний координаты, скорости, ускорения и силы. А частота колебаний кинетической и потенциальной энергий в 2 раза больше, чем частота колебаний координаты, скорости, ускорения и силы.
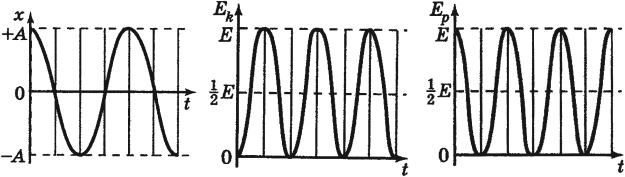
Графики зависимости кинетической, потенциальной и полной энергий всегда лежат выше оси времени.
Если сила сопротивления отсутствует, то полная энергия сохраняется. График зависимости полной энергии от времени есть прямая, параллельная оси времени (в отсутствие сил трения).
Амплитуда и фаза колебаний
Амплитуда колебаний – модуль наибольшего смещения тела от положения равновесия.
Обозначение – \( A\, (X_
Фаза колебаний – это величина, которая определяет состояние колебательной системы в любой момент времени.
Обозначение – \( \varphi \) , единицы измерения – рад (радиан).

Фаза колебаний – это величина, стоящая под знаком синуса или косинуса. Она показывает, какая часть периода прошла от начала колебаний.
Фаза гармонических колебаний в процессе колебаний изменяется.
\( \varphi_0 \) – начальная фаза колебаний.
Начальная фаза колебаний – величина, которая определяет положение тела в начальный момент времени.
Важно!
Путь, пройденный телом за одно полное колебание, равен четырем амплитудам.
Период колебаний
Период колебаний – это время одного полного колебания.
Обозначение – \( T \) , единицы измерения – с.

Период гармонических колебаний – постоянная величина.
Частота колебаний
Частота колебаний – это число полных колебаний в единицу времени.
Обозначение – \( \nu \) , единицы времени – с -1 или Гц (Герц).
1 Гц – это частота такого колебательного движения, при котором за каждую секунду совершается одно полное колебание:
Период и частота колебаний – взаимно обратные величины:
Циклическая частота – это число колебаний за 2π секунд.
Обозначение – \( \omega \) , единицы измерения – рад/с.
Свободные колебания (математический и пружинный маятники)
Свободные колебания – колебания, которые совершает тело под действием внутренних сил системы за счет начального запаса энергии после того как его вывели из положения устойчивого равновесия.
Условия возникновения свободных колебаний:
- при выведении тела из положения равновесия должна возникнуть сила, стремящаяся вернуть его в положение равновесия;
- силы трения в системе должны быть достаточно малы. При наличии сил трения свободные колебания будут затухающими.
При наличии сил трения свободные колебания будут затухающими.
Затухающие колебания – это колебания, амплитуда которых с течением времени уменьшается.
Математический маятник – это материальная точка, подвешенная на невесомой нерастяжимой нити.
Период колебаний математического маятника:

Частота колебаний математического маятника:
Циклическая частота колебаний математического маятника:

Максимальное значение скорости колебаний математического маятника:
Максимальное значение ускорения колебаний математического маятника:
Период свободных колебаний математического маятника, движущегося вверх с ускорением или вниз с замедлением:
Период свободных колебаний математического маятника, движущегося вниз с ускорением или вверх с замедлением:
Период свободных колебаний математического маятника, горизонтально с ускорением или замедлением:
Мгновенное значение потенциальной энергии математического маятника, поднявшегося в процессе колебаний на высоту \( h \) , определяется по формуле:
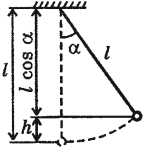
где \( l \) – длина нити, \( \alpha \) – угол отклонения от вертикали.
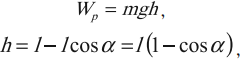
Пружинный маятник – это тело, подвешенное на пружине и совершающее колебания вдоль вертикальной или горизонтальной оси под действием силы упругости пружины.
Период колебаний пружинного маятника:
Частота колебаний пружинного маятника:
Циклическая частота колебаний пружинного маятника:

Максимальное значение скорости колебаний пружинного маятника:
Максимальное значение ускорения колебаний пружинного маятника:
Мгновенную потенциальную энергию пружинного маятника можно найти по формуле:
Амплитуда потенциальной энергии – максимальное значение потенциальной энергии, величина, стоящая перед знаком синуса или косинуса:
Важно!
Если маятник не является ни пружинным, ни математическим (физический маятник), то его циклическую частоту, период и частоту колебаний по формулам, применимым к математическому и пружинному маятнику, рассчитать нельзя. В данном случае эти величины рассчитываются из формулы силы, действующей на маятник, или из формул энергий.
Вынужденные колебания
Вынужденные колебания – это колебания, происходящие под действием внешней периодически изменяющейся силы.
Вынужденные колебания, происходящие под действием гармонически изменяющейся внешней силы, тоже являются гармоническими и незатухающими. Их частота равна частоте внешней силы и называется частотой вынужденных колебаний.
Резонанс
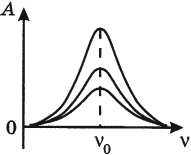
Резонанс – явление резкого возрастания амплитуды колебаний, которое происходит при совпадении частоты вынуждающей силы и собственной частоты колебаний тела.

\( v_0 \) – собственная частота колебаний маятника.
На рисунке изображены резонансные кривые для сред с разным трением. Чем меньше трение, тем выше и острее резонансная кривая.
Явление резонанса учитывается при периодически изменяющихся нагрузках в машинах и различных сооружениях.
Также резонанс используется в акустике, радиотехнике и т. д.
Длина волны
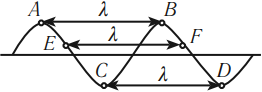
Длина волны – это расстояние, на которое волна распространяется за один период, т. е. это кратчайшее расстояние между двумя точками среды, колеблющимися в одинаковых фазах.
Обозначение – \( \lambda \) , единицы измерения – м.

Расстояние между соседними гребнями или впадинами в поперечной волне и между соседними сгущениями или разряжениями в продольной волне равно длине волны.
Скорость распространения волны – это скорость перемещения горбов и впадин в поперечной волне и сгущений или разряжений в продольной волне.
Звук – это колебания упругой среды, воспринимаемые органом слуха.
Условия, необходимые для возникновения и ощущения звука:
- наличие источника звука;
- наличие упругой среды между источником и приемником звука;
- наличие приемника звука; • частота колебаний должна лежать в звуковом диапазоне;
- мощность звука должна быть достаточной для восприятия.
Звуковые волны – это упругие волны, вызывающие у человека ощущение звука, представляющие собой зоны сжатия и разряжения, передающиеся на расстояние с течением времени.
Классификация звуковых волн:
- инфразвук ( \( \nu \) \( \nu \) \( \nu \) > 20 000 Гц).
Скорость звука – это скорость распространения фазы колебания, т. е. области сжатия и разряжения среды.
Скорость звука зависит
- от упругих свойств среды:
в воздухе – 331 м/с, в воде – 1400 м/с, в металле – 5000 м/с;
в воздухе при температуре 0°С – 331 м/с,
в воздухе при температуре +15°С – 340 м/с.
Характеристики звуковой волны
- Громкость – это величина, характеризующая слуховые ощущения человека, зависящая от амплитуды колебаний в звуковой волне. Единицы измерения – дБ (децибел).
- Высота тона – это величина, характеризующая слуховые ощущения человека, зависящая от частоты колебаний в звуковой волне. Чем больше частота, тем выше звук. Чем меньше частота, тем ниже звук.
- Тембр – это окраска звука.
Музыкальный звук – это звук, издаваемый гармонически колеблющимся телом. Каждому музыкальному тону соответствует определенная длина и частота звуковой волны.
Шум – хаотическая смесь тонов.
http://zaochnik.com/spravochnik/fizika/mehanicheskie-kolebanija/vynuzhdennye-kolebanija/
http://fizi4ka.ru/egje-2018-po-fizike/mehanicheskie-kolebanija-i-volny-2.html