Численные методы решения нелинейных уравнений. Метод хорд.
Численные методы решения нелинейных уравнений. Метод хорд.
Метод хорд ( метод также известен как Метод секущих ) один из методов решения нелинейных уравнений и основан на последовательном сужении интервала, содержащего единственный корень уравнения  . Итерационный процесс выполняется до того момента, пока не будет достигнута заданная точность
. Итерационный процесс выполняется до того момента, пока не будет достигнута заданная точность  .
.
В отличие от метода половинного деления, метод хорд предлагает, что деление рассматриваемого интервала будет выполняться не в его середине, а в точке пересечения хорды с осью абсцисс (ось — Х). Следует отметить, что под хордой понимается отрезок, который проведен через точки рассматриваемой функции по концам рассматриваемого интервала. Рассматриваемый метод обеспечивает более быстрое нахождение корня, чем метод половинного деления, при условии задания одинакового рассматриваемого интервала.
Геометрически метод хорд эквивалентен замене кривой  хордой, проходящей через точки
хордой, проходящей через точки  и
и  (см. рис.1.).
(см. рис.1.).

Рис.1. Построение отрезка (хорды) к функции  .
.
Уравнение прямой (хорды), которая проходит через точки А и В имеет следующий вид:

Данное уравнение является типовым уравнением для описания прямой вы декартовой системе координат. Наклон кривой задается по ординате и абсциссе с помощью значений в знаменателе  и
и  , соответственно.
, соответственно.
Для точки пресечения прямой с осью абсцисс  записанное выше уравнение перепишется в следующем виде:
записанное выше уравнение перепишется в следующем виде:

В качестве нового интервала для прохождения итерационного процесса выбираем один из двух  или
или  , на концах которого функция принимает значения разных знаков. Противоположность знаков значений функции на концах отрезка можно определить множеством способов. Один из множества этих способов — умножение значений функции на концах отрезка и определение знака произведения путём сравнения результата умножения с нулём:
, на концах которого функция принимает значения разных знаков. Противоположность знаков значений функции на концах отрезка можно определить множеством способов. Один из множества этих способов — умножение значений функции на концах отрезка и определение знака произведения путём сравнения результата умножения с нулём:
 или
или  .
.
Итерационный процесс уточнения корня заканчивается, когда условие близости двух последовательных приближений станет меньше заданной точности, т.е.
 .
.

Рис.2. Пояснение к определению погрешности расчета.
Следует отметить, что сходимость метода хорд линейная, однако более быстрая, чем сходимость метода половинного деления.
Алгоритм нахождения корня нелинейного уравнения по методу хорд
1. Найти начальный интервал неопределенности  одним из методов отделения корней. З адать погрешность расчета (малое положительное число ) и начальный шаг итерации (
одним из методов отделения корней. З адать погрешность расчета (малое положительное число ) и начальный шаг итерации (  ) .
) .
2. Найти точку пересечения хорды с осью абсцисс:

3. Необходимо найти значение функции в точках  ,
,  и
и  . Далее необходимо проверить два условия:
. Далее необходимо проверить два условия:
— если выполняется условие  , то искомый корень находится внутри левого отрезка положить
, то искомый корень находится внутри левого отрезка положить  ,
,  ;
;
— если выполняется условие  , то искомый корень находится внутри правого отрезка принять
, то искомый корень находится внутри правого отрезка принять  ,
,  .
.
В результате находится новый интервал неопределенности, на котором находится искомых корень уравнения:

4. Проверяем приближенное значение корня уравнения на предмет заданной точности, в случае:
— если разность двух последовательных приближений станет меньше заданной точности , то итерационный процесс заканчивается. Приближенное значение корня определяется по формуле:

— если разность двух последовательных приближений не достигает необходимой точности  , то необходимо продолжить итерационный процесс
, то необходимо продолжить итерационный процесс  и перейти к п.2 рассматриваемого алгоритма.
и перейти к п.2 рассматриваемого алгоритма.
Пример решения уравнений методом хорд
В качестве примера, рассмотрим решение нелинейного уравнения  методом хорд. Корень необходимо найти в рассматриваемом диапазоне
методом хорд. Корень необходимо найти в рассматриваемом диапазоне  с точностью
с точностью  .
.
Вариант решения нелинейного уравнения в программном комплексе MathCAD .

Результаты расчетов, а именно динамика изменения приближенного значения корня, а также погрешности расчета от шага итерации представлены в графической форме (см. рис.1).

Рис.1. Результаты расчета по методу хорд
Для обеспечения заданной точности при поиске уравнения в диапазоне необходимо выполнить 6 итераций. На последнем шаге итерации приближенное значение корня нелинейного уравнения будет определяться значением:  .
.
Примечание:
Модификацией данного метода является метод ложного положения ( False Position Method ), который отличается от метода секущих только тем, что всякий раз берутся не последние 2 точки, а те точки, которые находятся вокруг корня.


Следует отметить, что в случае если от нелинейной функции можно взять вторую производную  алгоритм поиска может быть упрощен. Предположим, что вторая производная сохраняет постоянный знак, и рассмотрим два случая:
алгоритм поиска может быть упрощен. Предположим, что вторая производная сохраняет постоянный знак, и рассмотрим два случая:
Случай №1:  0,
0,
f»(a)>0″ width=»158″ height=»20″ border=»0″ />
Из первого условия получается, что неподвижной стороной отрезка является – сторона a .
Случай №2:  0″ width=»158″ height=»20″ border=»0″ />
0″ width=»158″ height=»20″ border=»0″ />
Из второго условия получается, что неподвижной стороной отрезка является – сторона b .
В общем виде, для выявления неподвижного конца можно записать следующее условие:  0″ width=»122″ height=»20″ border=»0″ /> , где
0″ width=»122″ height=»20″ border=»0″ /> , где  или
или  .
.

Рис. 3. Примеры убывающей или возрастающей функции
Таким образом, в зависимости от вида функции получаются два выражения для упрощения поиска корня функции:
— если функция соответствует первому случаю (см. рис. 3), тогда формула будет иметь следующий вид:

 , где k =0,1,2,…
, где k =0,1,2,…
— если функция соответствует второму случаю (см. рис. 3), тогда формула будет иметь следующий вид:

 , где k =0,1,2,…
, где k =0,1,2,…
Случай  сводится к рассматриваемому , если уравнение записать в форме:
сводится к рассматриваемому , если уравнение записать в форме:  .
.
Для того, чтобы добавить Ваш комментарий к статье, пожалуйста, зарегистрируйтесь на сайте.
Решение нелинейных уравнений и систем уравнений в пакете MathCAD
Решение нелинейных уравнений
Вычисление корней численными методами включает два основных этапа:
· уточнение корней до заданной точности.
Рассмотрим эти два этапа подробно.
Отделение корней нелинейного уравнения
Учитывая легкость построения графиков функций в MathCAD , в дальнейшем будет использоваться графический метод отделения корней.
Пример. Дано алгебраическое уравнение
 .
.
Определить интервалы локализации корней этого уравнения.
Пример. Дано алгебраическое уравнение
 .
.
Определить интервалы локализации корней этого уравнения.
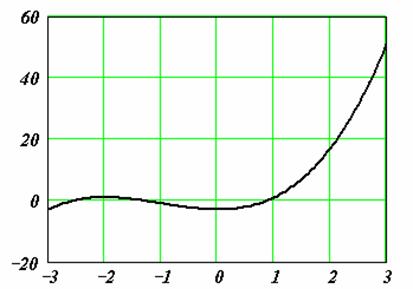
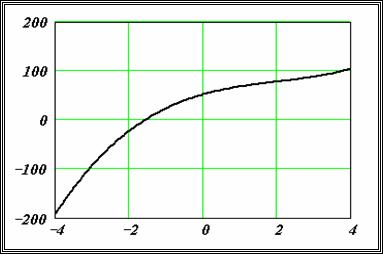
На рисунке приведен график функции 
 , построенный в MathCAD . Видно, что в качестве интервала изоляции можно принять интервал
, построенный в MathCAD . Видно, что в качестве интервала изоляции можно принять интервал  . Однако уравнение имеет три корня. Следовательно, можно сделать вывод о наличии еще двух комплексных корней. ¨
. Однако уравнение имеет три корня. Следовательно, можно сделать вывод о наличии еще двух комплексных корней. ¨
Уточнение корней нелинейного уравнения
Для уточнения корня используются специальные вычислительные методы такие, как метод деления отрезка пополам, метод хорд, метод касательных (метод Ньютона) и многие другие.
Функция root . В MathCAD для уточнения корней любого нелинейного уравнения (не обязательно только алгебраического) введена функция root , которая может иметь два или четыре аргумента, т.е.  или
или  , где
, где  – имя функции или арифметическое выражение, соответствующее решаемому нелинейному уравнению,
– имя функции или арифметическое выражение, соответствующее решаемому нелинейному уравнению,  – скалярная переменная, относительно которой решается уравнение,
– скалярная переменная, относительно которой решается уравнение,  – границы интервала локализации корня.
– границы интервала локализации корня.
Пример. Используя функцию  , найти все три корня уравнения
, найти все три корня уравнения  , включая и два комплексных.
, включая и два комплексных.
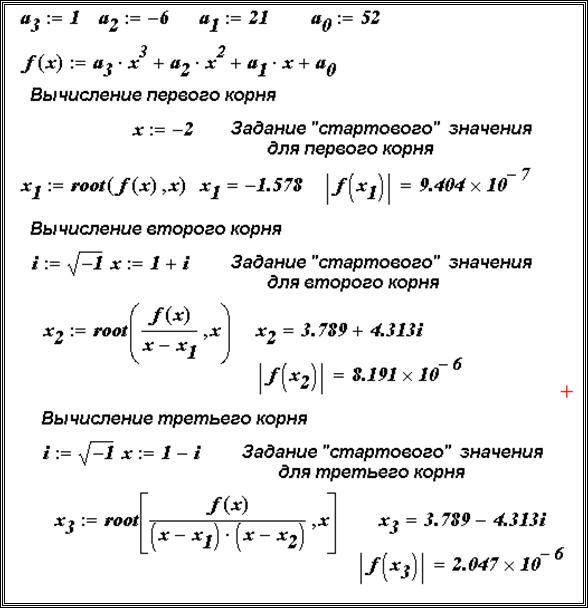
Заметим, что для вычисления всех трех корней использовался прием понижения порядка алгебраического уравнения, рассмотренный в п. 8.1.1. ¨
Функция root с двумя аргументами требует задания (до обращения к функции) переменной  начального значения корня из интервала локализации.
начального значения корня из интервала локализации.
Пример 8.1.5. Используя функцию root , вычислить изменения корня нелинейного уравнения  при изменении коэффициента а от 1 до 10 с шагом 1.
при изменении коэффициента а от 1 до 10 с шагом 1.
Функция polyroots . Для вычисления всех корней алгебраического уравнения порядка  (не выше 5) рекомендуется использовать функцию polyroots . Обращение к этой функции имеет вид polyroots (v) , где v – вектор, состоящий из n +1 проекций, равных коэффициентам алгебраического уравнения, т.е.
(не выше 5) рекомендуется использовать функцию polyroots . Обращение к этой функции имеет вид polyroots (v) , где v – вектор, состоящий из n +1 проекций, равных коэффициентам алгебраического уравнения, т.е.  . Эта функция не требует проведения процедуры локализации корней.
. Эта функция не требует проведения процедуры локализации корней.
Пример. Используя функцию polyroots , найти все три корня уравнения  , включая и два комплексных
, включая и два комплексных

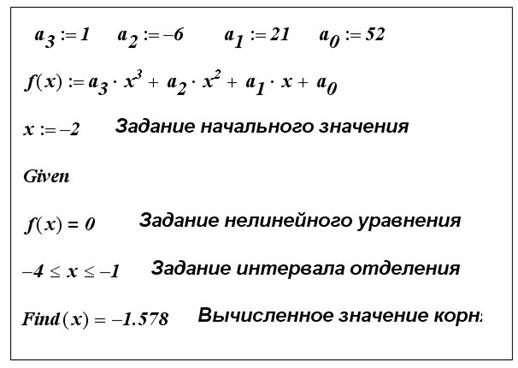
Блок Given . При уточнении корня нелинейного уравнения можно использовать специальный вычислительный блок Given , имеющий следующую структуру:
Решаемое уравнение задается в виде равенства, в котором используется «жирный» знак равно, вводимый с палитры Логический .
Ограничения содержат равенства или неравенства, которым должен удовлетворять искомый корень.
Функция Find уточняет корень уравнения, вызов этой функции имеет вид Find ( x ), где x – переменная, по которой уточняется корень. Если корня уравнения на заданном интервале не существует, то следует вызвать функцию Minerr ( x ), которая возвращает приближенное значение корня.
Для выбора алгоритма уточнения корня необходимо щелкнуть правой кнопкой мыши на имени функции Find ( x ) и в появившемся контекстном меню (см. рисунок) выбрать подходящий алгоритм.
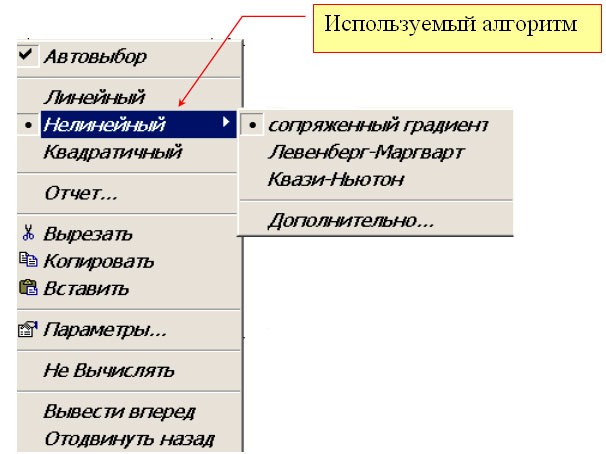
Аналогично можно задать алгоритм решения и для функции Minerr ( x ).
Использование численных методов в функциях Find ( x ), Minerr ( x ) требует перед блоком Given задать начальные значения переменным, по которым осуществляется поиск корней уравнения.
Пример. Используя блок Given , вычислите корень уравнения  в интервале отделения
в интервале отделения  .
.
Решение систем уравнений
В зависимости от того, какие функции входят в систему уравнений, можно выделить два класса систем:
· алгебраические системы уравнений;
· трансцендентные системы уравнений.
Среди алгебраических систем уравнений особое место занимают системы линейных алгебраических уравнений (СЛАУ).
Системы линейных алгебраических уравнений
Системой линейных алгебраических уравнений (СЛАУ) называется система вида:
В матричном виде систему можно записать как
 ,
,
где  – матрица размерности
– матрица размерности  ,
,  – вектор с
– вектор с  проекциями.
проекциями.
Для вычисления решения СЛАУ следует использовать функцию lsolve , обращение к которой имеет вид: lsolve (А, b ), где А – матрица системы,  – вектор правой части.
– вектор правой части.
Решение систем нелинейных уравнений
MathCAD дает возможность находить решение системы уравнений численными методами, при этом максимальное число уравнений в MathCAD 2001 i доведено до 200.
Для решения системы уравнений необходимо выполнить следующие этапы.
Задание начального приближения для всех неизвестных, входящих в систему уравнений. При небольшом числе неизвестных этот этап можно выполнить графически, как показано в примере.
Пример. Дана система уравнений:

Определить начальные приближения для решений этой системы.
Видно, что система имеет два решения: для первого решения в качестве начального приближения может быть принята точка (-2, 2), а для второго решения – точка (5, 20). ¨
Вычисление решения системы уравнений с заданной точностью . Для этого используется уже известный вычислительный блок Given .
Функция Find вычисляет решение системы уравнений с заданной точностью, и вызов этой функции имеет вид Find ( x ), где x – список переменных, по которым ищется решение. Начальные значения этим переменным задаются в блоке . Число аргументов функции должно быть равно числу неизвестных.
Следующие выражения недопустимы внутри блока решения:
· ограничения со знаком ¹ ;
· дискретная переменная или выражения, содержащие дискретную переменную в любой форме;
· блоки решения уравнений не могут быть вложены друг в друга, каждый блок может иметь только одно ключевое слово Given и имя функции Find (или Minerr ).
Пример. Используя блок Given , вычислить все решения системы предыдущего примера. Выполнить проверку найденных решений.
Пример. Используя функцию  , вычислите решение системы уравнений
, вычислите решение системы уравнений
Решение нелинейных уравнений
Дата добавления: 2015-07-23 ; просмотров: 4863 ; Нарушение авторских прав
Ознакомиться с основными методами решения нелинейных уравнений и их реализацией в пакете MathCAD.
Инженеру часто приходится составлять и решать нелинейные уравнения, что может представлять собой самостоятельную задачу или являться частью более сложных задач. В обоих случаях практическая ценность метода решения определяется быстротой и эффективностью полученного решения, а выбор подходящего метода зависит от характера рассматриваемой задачи. Важно отметить, что к результатам компьютерных вычислений всегда нужно относиться критически, анализировать их на правдоподобность. Чтобы избежать «подводных камней» при использовании любого стандартного пакета, реализующего численные методы, нужно иметь хотя бы минимальное представление о том, какой именно численный метод реализован для решения той или иной задачи.
Нелинейные уравнения можно разделить на 2 класса – алгебраические и трансцендентные. Алгебраическими уравнениями называют уравнения, содержащие только алгебраические функции (целые – в частности многочлен, рациональные, иррациональные). Уравнения, содержащие другие функции (тригонометрические, показательные, логарифмические и др.) называются трансцендентными. Нелинейные уравнения могут решаться точными или приближенными методами. Точные методы позволяют записать корни в виде некоторого конечного соотношения (формулы). К сожалению, большинство трансцендентных уравнений, а также произвольные алгебраические уравнения степени выше четвертой не имеют аналитических решений. Кроме того, коэффициенты уравнения могут быть известны лишь приблизительно и, следовательно, сама задача о точном определении корней теряет смысл. Поэтому для решения используются итерационные методы последовательного приближения. Вначале следует вначале отделить корни (т.е. найти их приближенное значение или отрезок их содержащий), а затем методом последовательных приближений их уточнить. Отделить корни можно – установив знаки функции f(x) и ее производной в граничных точках области ее существования, оценив приближенные значения из физического смысла задачи, или из решения аналогичной задачи при других исходных данных.
Широко распространен графический способ определения приближенных значений действительных корней – строят график функции f(x) и отмечают точки пересечения его с осью ОХ. Построение графиков часто удается упростить, заменив уравнение f(x)=0 равносильным ему уравнением  , где функции f1(x) и f2(x) — более простые, чем функция f(x). В этом случае следует искать точку пересечения этих графиков.
, где функции f1(x) и f2(x) — более простые, чем функция f(x). В этом случае следует искать точку пересечения этих графиков.
Пример 1.Графически отделить корни уравнения x lg x = 1. Перепишем его в виде равенства lg x=1/xи найдем абсциссы точек пересечения логарифмической кривой y = lg x и гиперболы y = 1/x (рис. 5). Видно, что единственный корень уравнения  .
.
 Рис. 5. Метод графического отделения корней Рис. 5. Метод графического отделения корней |
Реализация классических приближенных методов решения в пакете MathCAD.
Метод половинного деления
Отрезок, на концах которого функция принимает значения разного знака, делится пополам и, если корень лежит правее центральной точки, то к центру подтягивается левый край, а если – левее, то правый край. Новый суженный отрезок снова делится пополам и процедура повторяется. Этот метод прост и надежен, всегда сходится (хотя часто медленно – расплата за простоту!). Программная реализация его в пакете MathCAD рассмотрена в лабораторной работе №7 данного пособия.
Метод хорд
В качестве последовательных приближений к корню уравнения принимаются значения х1, х2, . хn точек пересечения хорды АВ с осью абсцисс (рис. 6).
Уравнение хорды AB имеет вид:  . Для точки пересечения ее с осью абсцисс (х=х1, y=0) имеем:
. Для точки пересечения ее с осью абсцисс (х=х1, y=0) имеем:
 .
.
Пусть для определенности кривая у = f(x) будет выпукла вниз и, следовательно, расположена ниже своей хорды АВ, т.е. на отрезке [a,b] f ²(x)>0. Возможны два случая: f(а)>0 (рис. 6, а) и f(а) 3 –0,2x 2 –0,2х–1,2 = 0 с точностью e= 0,01. (Точный корень уравнения x = 1,2).
Для организации итерационных вычислений в MathCAD документе используется функция until(a, z),котораявозвращает значение величины z, пока выражение a не становится отрицательным.

Метод Ньютона
Отличие этого метода от предыдущего состоит в том, что вместо хорды на каждом шаге проводится касательная к кривой y=f(x)при x=хi и ищется точка пересечения ее с осью абсцисс (рис. 7):
 Рис. 7. Метод касательных Ньютона Рис. 7. Метод касательных Ньютона |
При этом не обязательно задавать отрезок [а, b], содержащий корень уравнения), а достаточно лишь задать начальное приближение корня x=х0, которое должно находиться на том же конце интервала [а, b], где знаки функции и ее второй производной совпадают.
Уравнение касательной, проведенной к кривой y = f(x) через точку В0 с координатами х0 и f(х0), имеет вид: 
Отсюда найдем следующее приближение корня х1как абсциссу точки пересечения касательной с осью Ох (y = 0): 
Аналогично могут быть найдены и последующие приближения как точки пересечения с осью абсцисс касательных, проведенных в точках В1, В2 и так далее. Формула для (i +1) приближения имеет вид:

Условием окончания итерационного процесса является неравенство ïf(xi)ï 1), то процесс итерации может быть расходящимся (рис. 8, в).
Пример 4. Решитьуравнение x 3 – x – 1 = 0 методом простой итерации с точностью e = 10 -3 . Реализация этой задачи представлена следующим MathCAD документом.
Реализация приближенных методов решения встроенными функциями MathCAD
Использование функции root
Для уравнений вида f(x) = 0 решение находится с помощью функции: root(f(х),х,a,b), которая возвращает значение х, принадлежащее отрезку [a, b], при котором выражение или функция f(х)обращается в 0. Оба аргумента этой функции x и f(x) должны быть скалярами, а аргументы a, b– являютсянеобязательными и, если используются, то должны быть вещественными числами, причем a
| | | следующая лекция ==> | |
| Решение систем уравнений | | | Задание на лабораторную работу |
Не нашли то, что искали? Google вам в помощь!
http://pers.narod.ru/study/mathcad/07.html
http://life-prog.ru/2_52109_reshenie-nelineynih-uravneniy.html