5.2. Метод градиента (метод скорейшего спуска)
Пусть имеется система нелинейных уравнений:
 (5.13)
(5.13)
Систему (5.13) удобнее записать в матричном виде:
 (5.14)
(5.14)
Где  — вектор – функция;
— вектор – функция;  — вектор – аргумент.
— вектор – аргумент.
Решение системы (5.14), как и для системы линейных уравнений (см. п. 3.8), будем искать в виде
 (5.15)
(5.15)
Здесь  и
и  — векторы неизвестных на P и P+1 шагах итераций; вектор невязок на P-ом шаге – F(P) = F(X(P)); W‘P – транспонированная матрица Якоби на P – ом шаге;
— векторы неизвестных на P и P+1 шагах итераций; вектор невязок на P-ом шаге – F(P) = F(X(P)); W‘P – транспонированная матрица Якоби на P – ом шаге;
 ;
;
 .
.
Пример 5.2. Методом градиента вычислим приближенно корни системы


Расположенные в окрестности начала координат.

Выберем начальное приближение:

По вышеприведенным формулам найдем первое приближение:

Аналогичным образом находим следующее приближение:



Ограничимся двумя итерациями (шагами), и оценим невязку:

· Как видно из примера, решение достаточно быстро сходится, невязка быстро убывает.
· При решении системы нелинейных уравнений методом градиента матрицу Якоби необходимо пересчитывать на каждом шаге (итерации).
Вопросы для самопроверки
· Как найти начальное приближение: а) для метода Ньютона; б) для метода градиента?
· В методе скорейшего спуска вычисляется Якобиан (матрица Якоби). Чем отличается Якобиан, вычисленный для СЛАУ, от Якобиана, вычисленного для нелинейной системы уравнений?
· Каков критерий остановки итерационного процесса при решении системы нелинейных уравнений: а) методом Ньютона; б) методом скорейшего спуска?
Julia, Градиентный спуск и симплекс метод
Продолжаем знакомство с методами многомерной оптимизации.
Далее предложена реализация метода наискорейшего спуска с анализом скорости выполнения, а также имплементация метода Нелдера-Мида средствами языка Julia и C++.
Метод градиентного спуска
Поиск экстремума ведется шагами в направлении градиента (max) или антиградиента (min). На каждом шаге в направлении градиента (антиградиента) движение осуществляется до тех пор, пока функция возрастает (убывает).
За теорией пройдитесь по ссылкам:
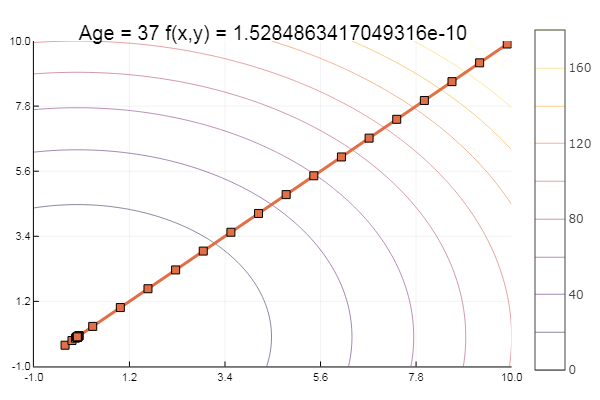
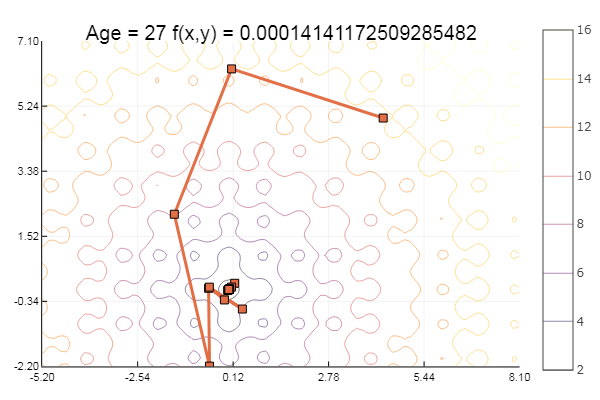
Модельной функцией выберем эллиптический параболоид и зададим функцию отрисовки рельефа:

Зададим функцию реализующую метод наискорейшего спуска, которая принимает размерность задачи, точность, длину шага, начальное приближение и размеры рамки ограничивающей график:
На функции вычисляющей направление градиента можно заостриться в плане оптимизации.
Первое, что идет на ум — это действия с матрицами:
Чем действительна хороша Julia, так это тем, что проблемные места легко можно потестить:
Можно кинуться перепечатывать всё в Сишном стиле
Но как оказывается, оно само и без нас знает, какие типы надо ставить, так что приходим к компромиссу:
А теперь пусть рисует:
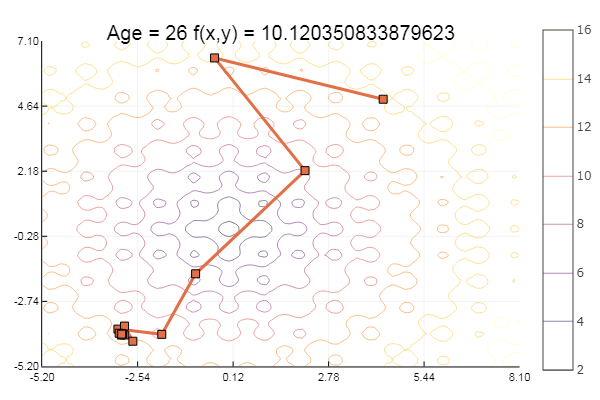
А теперь опробуем на функции Экли:

Свалилось в локальный минимум. Сделаем-ка шаги побольше:
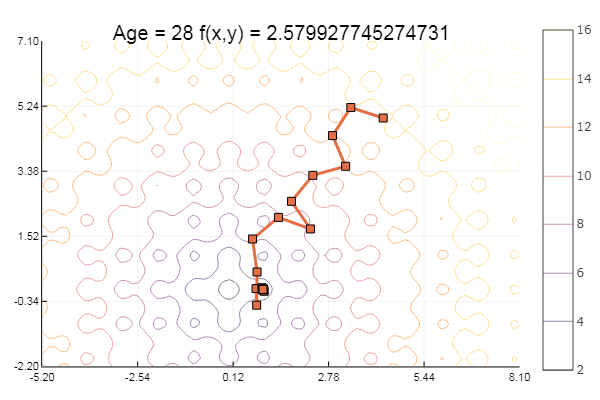
Отлично! А теперь что-нибудь с оврагом, например функцию Розенброка:

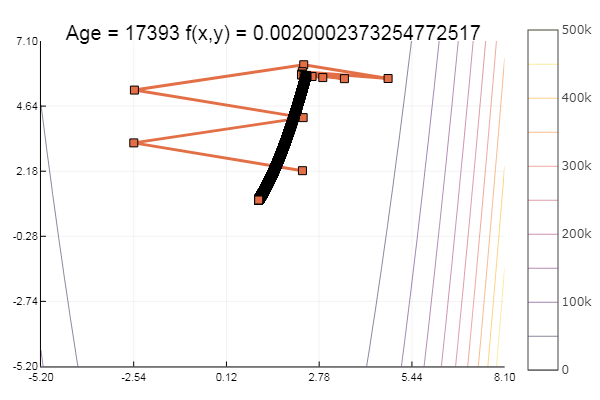

Мораль: градиенты не любят пологостей.
Симплекс метод
Метод Нелдера — Мида, также известный как метод деформируемого многогранника и симплекс-метод, — метод безусловной оптимизации функции от нескольких переменных, не использующий производной(точнее — градиентов) функции, а поэтому легко применим к негладким и/или зашумлённым функциям.
Суть метода заключается в последовательном перемещении и деформировании симплекса вокруг точки экстремума.
Метод находит локальный экстремум и может «застрять» в одном из них. Если всё же требуется найти глобальный экстремум, можно пробовать выбирать другой начальный симплекс.
И сам симплекс метод:

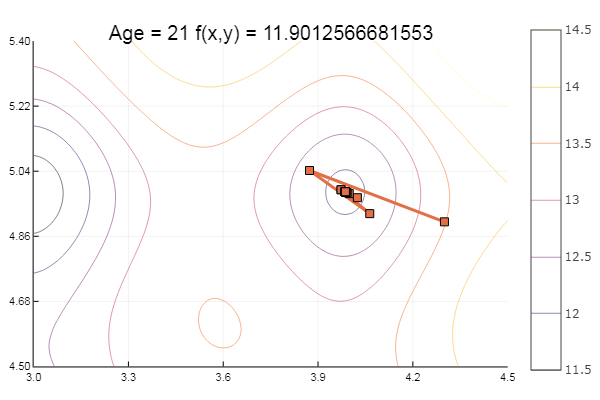
И на десерт какую-нибудь буку… например функцию Букина 

Локальный минимум — ну ничего, главное правильно подобрать стартовый симплекс, так что для себя я нашел фаворита.
Бонус. Методы Нелдера-Мида, наискорейшего спуска и покоординатного спуска на С++
На сегодня достаточно. Следующим этапом будет логично попробовать что-нибудь из глобальной оптимизации, набрать побольше тестовых функций, а затем изучить пакеты со встроенными методами.
Метод градиентного спуска
На этом занятии мы с вами рассмотрим довольно популярный алгоритм под названием «метод градиентного спуска» или, еще говорят «метод наискорейшего спуска». Идея метода довольно проста. Предположим, имеется дифференцируемая функция  с точкой экстремума x*. Нам нужно найти эту точку. Для простоты восприятия информации, предположим, что это парабола с точкой экстремума x*. Конечно, для такого простого случая эту точку можно очень легко определить из уравнения:
с точкой экстремума x*. Нам нужно найти эту точку. Для простоты восприятия информации, предположим, что это парабола с точкой экстремума x*. Конечно, для такого простого случая эту точку можно очень легко определить из уравнения:

но она используется лишь для визуализации метода градиентного спуска. В действительности функции могут быть гораздо сложнее и зависеть от произвольного числа аргументов, для которых решать системы уравнений достаточно хлопотное занятие. Или же, функция постоянно меняется и нам необходимо под нее подстраиваться для определения текущего положения точки минимума. Все эти задачи удобнее решать с позиции алгоритмов направленного поиска, например, градиентного спуска.
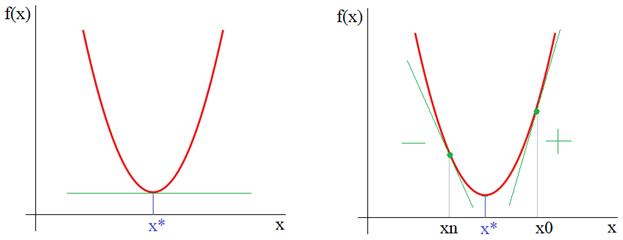
Итак, из рисунка мы хорошо видим, что справа от точки экстремума x* производная положительна, а слева – отрицательна. И это общее математическое правило для точек локального минимума. Предположим, что мы выбираем произвольную начальную точку  на оси абсцисс. Теперь, смотрите, чтобы из двигаться в сторону x*, нам нужно в области положительных производных ее уменьшать, а в области отрицательных – увеличивать. Математически это можно записать так:
на оси абсцисс. Теперь, смотрите, чтобы из двигаться в сторону x*, нам нужно в области положительных производных ее уменьшать, а в области отрицательных – увеличивать. Математически это можно записать так:

Здесь n – номер итерации работы алгоритма. Но, вы можете спросить: а где же тут градиент? В действительности, мы его уже учли чисто интуитивно, когда определяли перемещение вдоль оси абсцисс для поиска оптимальной точки x*. Но математика не терпит такой вульгарности, в ней все должно быть прописано и точно определено. Как раз для этого нужно брать не просто производную, а еще и определять направление движения, используя единичные векторы декартовой системы координат:
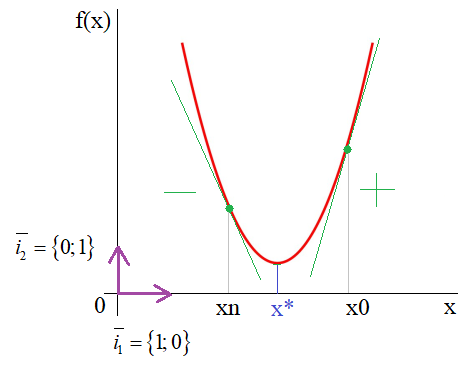
И градиент функции можно записать как

то есть, это будет уже направление вдоль оси ординат и направлен в сторону наибольшего увеличения функции. Соответственно, двигаясь в противоположную сторону, будем перемещаться к точке минимума x*.
Конечно, в результирующей формуле алгоритма поиска этот единичный вектор не пишется, а вместо него указывается разность по оси ординат, т.к. именно вдоль нее он и направлен:
Однако у такой формулы есть один существенный недостаток: значение производной может быть очень большим и мы попросту «перескочим» через значение x* и уйдем далеко влево или вправо. Чтобы этого не происходило, производную дополнительно умножают на некоторое небольшое число λ:

которое, в общем случае, также может меняться от итерации к итерации. Этот множитель получил название шаг сходимости.
Давайте, для примера, реализуем этот алгоритм на Python для случая одномерной параболы. Вначале подключим необходимые библиотеки и определим две функции: параболу
и ее производную:
Затем, определим необходимые параметры алгоритма и сформируем массивы значений по осям абсцисс и ординат:
Далее, переходим в интерактивный режим работы с графиком, чтобы создать анимацию для перемещения точки поиска минимума и создаем окно с осями графика:
Отображаем начальный график:
Запускаем алгоритм градиентного поиска:
В конце выводим найденное значение аргумента и оставляем график на экране устройства:
После запуска увидим скатывание точки к экстремуму функции. Установим значение
Увидим «перескоки» оптимального значение, то есть, неравномерную сходимость к точки минимума. А вот, если поставить параметр
то скатывания совсем не будет, т.к. аргумент x будет «перескакивать» точку минимума и никогда ее не достигать. Вот так параметр λ влияет на работу алгоритма градиентного спуска.
Выбор шага сходимости
Важно правильно его подбирать в каждой конкретной решаемой задаче. Обычно, это делается с позиции «здравого смысла» и опыта разработчика, но общие рекомендации такие: начинать со значения 0,1 и уменьшать каждый раз на порядок для выбора лучшего,

который обеспечивает и скорость и точность подбора аргумента x. В целом, это элемент творчества и, например, можно встретить и такой вариант изменения шага сходимости:

Функция min здесь выбирает наименьшее из двух аргументов и использует его в знаменателе дроби. Это необходимо, чтобы величина шага при больших n не становилась слишком маленькой и ограничивалась величиной

где mn – некоторое заданное ограничивающее значение.
Еще один прием связан с нормализацией градиента на каждом шаге работы алгоритма. В этом случае градиент функции (то есть, вектор):

приводится к единичной норме:

И уже он используется в алгоритме наискорейшего спуска:

В одномерном случае нашего примера, это, фактически означает, что вместо действительного значения градиента, берутся числа ±1:
И алгоритм в Python примет вид:
Как видите, такой подход требует уменьшения величины шага сходимости, на последующих итерациях, например, так:
Результат выглядит уже лучше и при этом, мы не привязаны к значению градиента.
Локальный минимум
Еще одной особенностью работы этого алгоритма является попадание в область локального минимума функции. Например, если взять вот такой график:

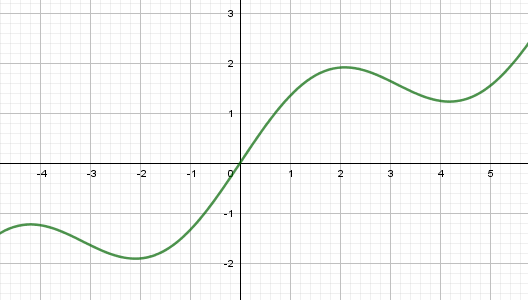
То при начальном значении x=0 получим один минимум, а, например, при x=2,5 – другой. В этом легко убедиться, если в нашей программе переписать функции:
(последняя – это производная:  ). Увеличим диапазон отображения графика:
). Увеличим диапазон отображения графика:
и запустим программу. Теперь, установим начальное значение xx=2,5, снова запустим и увидим уже другую точку локального минимума.
Это, наверное, основной недостаток данного алгоритма – попадание в локальный минимум. Чтобы решить эту проблему перебирают несколько разных начальных значений и смотрят: при котором был достигнуто наименьшее значение. Его и отбирают в качестве результата. Такой ход не дает нам гарантии, что действительно был найден глобальный минимум функции (иногда он может не существовать, как, например, с нашей синусоидой), но, тем не менее, это повышает наш шанс найти лучшее решение. Вот базовая теория и практика применения метода наискорейшего спуска.
Видео по теме

#1: Метод наименьших квадратов

#2: Метод градиентного спуска

#3: Метод градиентного спуска для двух параметров

#4: Марковские процессы в дискретном времени

#5: Фильтр Калмана дискретного времени

#6: Фильтр Калмана для авторегрессионого уравнения

#7: Векторный фильтр Калмана

#8: Фильтр Винера

#9: Байесовское построение оценок, метод максимального правдоподобия

#10: Байесовский классификатор, отношение правдоподобия
© 2022 Частичное или полное копирование информации с данного сайта для распространения на других ресурсах, в том числе и бумажных, строго запрещено. Все тексты и изображения являются собственностью сайта
http://habr.com/ru/post/440070/
http://proproprogs.ru/dsp/metod-gradientnogo-spuska