Кинематика телеуправления. Методы телеуправления (метод параллельного сближения, метод накрытия и метод пропорциональной навигации.
Траектория движения центра масс ЛА как математической точки, на которую наложены определённые кинематические связи, называется кинематической траекторией. Кинематическая траектория не учитывает инерционности ЛА и его динамических свойств, то есть не учитывает переходных процессов при управлении.
Динамическая траектория определяется путём решения уравнений динамики твёрдого тела, описанных в разделе 3.1, и показывает измерение траектории под влиянием переходных процессов.
Под воздействием случайных помех и возмущений фактическая траектория отличается и от динамической, и от кинематической. Однако это отличие обычно невелико и определяется величиной динамических и случайных ошибок, уменьшение которых является главной задачей проектирования систем радиоуправления. Величина этих ошибок зависит также от характера кинематических связей, которая определяет вид кинематической траектории, в частности, потому, что вид траектории определяет величину требуемых поперечных перегрузок.
Простейшей кинематической связью, накладываемой на управляемый ЛА при наведении по радиолучу, является требование, чтобы объект управления (ОУ) в течении всего времени полёта находился на линии визирования (линии, проходящеё через пункт управления (ПУ) и объект наблюдения (ОН) – цель). Такой метод называется методом накрытия (рисунок 3.6) . VП ,VH и VУ — скорости движения пункта управления, объекта наблюдения и объекта управления.
Рассмотрим подробнее траектории рисунок 3.6 (б) при неподвижном пункте управления.
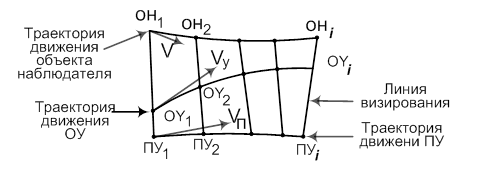
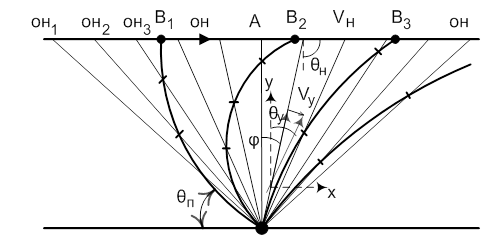
Рисунок 3.6- Метод накрытия
Из рисунка 3.6 (б) видно, что наибольшая кривизна траектории при встречных курсах (угол пуска 
 (3.11)
(3.11)
где  и
и  — радиальная и тангенциальная составляющие вектора скорости в полярной системе координат с началом в точке расположения ПУ;
— радиальная и тангенциальная составляющие вектора скорости в полярной системе координат с началом в точке расположения ПУ;  — угол наклона траектории,
— угол наклона траектории,  — угол визирования.
— угол визирования.
Для объекта наблюдения (ОН) справедливы аналогичные уравнения
 (3.12)
(3.12)
Кинематические связи при движении ОУ по методу накрытия сводятся к следующему:
 (3.13)
(3.13)
Уравнение рассогласования имеет вид
 , (3.14)
, (3.14)
где  — угловой параметр рассогласования, играющий роль сигнала ошибки для замкнутого контура наведения.
— угловой параметр рассогласования, играющий роль сигнала ошибки для замкнутого контура наведения.
В конце движения ОУ даже при малом  линейное отклонение может оказаться недопустимо большим; поэтому целесообразно (3.14) записать в виде
линейное отклонение может оказаться недопустимо большим; поэтому целесообразно (3.14) записать в виде
 (3.15)
(3.15)
где  — расстояние от ПУ до ОУ,
— расстояние от ПУ до ОУ,  — линейный параметр рассогласования.
— линейный параметр рассогласования.
Используя (3.11, 3.12, 3.13) запишем уравнение кинематической траектории
 (3.16)
(3.16)
где  — расстояние от ОУ до ОН.
— расстояние от ОУ до ОН.
Зная уравнение движения ОН и ОУ, можно найти зависимость кривизны траектории от начальных условий: отношения  и угла пуска
и угла пуска  . Тогда поперечное ускорение равно
. Тогда поперечное ускорение равно
 . (3.17)
. (3.17)
Максимальная перегрузка при наиболее неблагоприятных условиях  и при
и при  составляет величину
составляет величину
 (3.18)
(3.18)
где  — параметр траектории (на рисунке 3.6 (б) этот параметр равен высоте полёта ОН — отрезку ОА).
— параметр траектории (на рисунке 3.6 (б) этот параметр равен высоте полёта ОН — отрезку ОА).
Например: Для сверхзвукового ОУ с  перегрузка
перегрузка  достигается при наведении на объект, движущийся со скоростью
достигается при наведении на объект, движущийся со скоростью  по прямой с
по прямой с  при угле пуска
при угле пуска  .
.
При уменьшении  перегрузка быстро увеличивается, что ограничивает применение метода накрытия.
перегрузка быстро увеличивается, что ограничивает применение метода накрытия.
Маневрирование ОН с поперечным ускорением  увеличивает требуемое поперечное ускорение ОУ в соответствии с приближенным соотношением
увеличивает требуемое поперечное ускорение ОУ в соответствии с приближенным соотношением
 . (3.19)
. (3.19)
Для уменьшения поперечных перегрузок траекторию движения ОУ стараются спрямить путём наведения в упреждающую точку.
Метод наведения в упреждающую точку называется методом параллельного сближения.
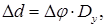
При наведении методом параллельного сближения ОУ движется так, что линия, соединяющая ОН и ОУ, перемещается параллельно линии визирования в момент пуска ОУ (рисунок 3.7).
Рисунок 3.7 — Метод параллельного сближения
Недостатком этого метода является тот факт, что при наведении в упреждающую точку ОУ, ОН и ПУ теперь не находятся на одной прямой. В связи с этим антенна ПУ должна иметь два луча: один – управляющий, для передачи команд управления на ОУ, другой – визированная цель для определения характеристик ОН.
Кинематическая связь, накладываемая на движение ОУ при параллельном сближении, представляется в виде
 (3.20)
(3.20)
Роль сравнивающего устройства системы автоматического управления должен выполнять прибор, определяющий параметры рассогласования  или
или  по измеренным на ПУ фактическим координатам ОН и ОУ, а также по углу
по измеренным на ПУ фактическим координатам ОН и ОУ, а также по углу  , который в момент пуска совпадает с углом визирования цели.
, который в момент пуска совпадает с углом визирования цели.
Как следует из построения (рисунок 3.7), при прямолинейном движении ОН кривизна траектории движения ОУ при параллельном сближении равен нулю. Маневрирование ОН приводит к искривлению траектории, причём поперечные перегрузки ОУ оказываются равными перегрузкам ОН
 (3.21)
(3.21)
Поперечные ускорения создаются системой управления под воздействии на неё сигналов, пропорциональных параметру рассогласования
 . (3.22)
. (3.22)
Из (3.22) следует, что идеальное наведение методом параллельного сближения (чтобы  ) нереально, так как это условие при конечных значениях
) нереально, так как это условие при конечных значениях  требует бесконечно большого коэффициента передачи по ускорению
требует бесконечно большого коэффициента передачи по ускорению  (коэффициент усиления системы управления).
(коэффициент усиления системы управления).
При конечном значении можно спрямить траекторию в достаточной мере, но при этом реализуется не метод параллельного сближения, а так называемый метод пропорциональной навигации.
При наведении методом пропорциональной навигации степень приближения траектории движения ОУ к траектории параллельного сближения зависит от навигационной постоянной (рисунок 3.8)
 (3.23)
(3.23)
точки  — точки встречи ОУ и ОН для траектории параллельного сближения, пропорциональной навигации и накрытия (вдогон).
— точки встречи ОУ и ОН для траектории параллельного сближения, пропорциональной навигации и накрытия (вдогон).
Рисунок 3.8- Метод пропорциональной навигации
Для метода пропорциональной навигации, в отличие от метода накрытия характерным является то, что вектор скорости OY в каждой точке визирования поворачивается на больший угол, чем линия визирования. Можно показать, что кривая движения вдогон (траектория накрытия) соответствует навигационной постоянной  , а траектория параллельного сближения
, а траектория параллельного сближения  . При
. При  поперечное ускорение при наведении методом пропорциональной навигации на маневрирующий ОН незначительно превышает ускорение ОН, а переход с траектории накрытия происходит в начале движения ОУ и рассматривается как нестационарный процесс в контуре управления.
поперечное ускорение при наведении методом пропорциональной навигации на маневрирующий ОН незначительно превышает ускорение ОН, а переход с траектории накрытия происходит в начале движения ОУ и рассматривается как нестационарный процесс в контуре управления.
Существуют и другие – комбинированные методы наведения: на первом отрезке ОУ управляется по методу накрытия, на завершающем участке – самонаведение по методу параллельного сближения и др.
Методы наведения летательных аппаратов в разработке игр

Год назад я закончил Московский Авиационный Институт и получил квалификацию «Инженер». Но поскольку к тому времени я уже год отработал программистом и знал, что в этой области буду работать и в дальнейшем, получение «корочки» не стало для меня чем-то переломным, в отличие от моих многих одногруппников. Знания, полученные на 4-5 курсах, казались мне довольно интересными и расширяющими кругозор, но не слишком полезными для работы программистом. Однако есть несколько тем, которые мне помогли и в работе. Про одну из них я и хочу рассказать, и имя ей — методы наведения летательного аппарата.
Под летательным аппаратом в наших курсах всегда подразумевалась управляемая авиационная ракета, чаще всего типа воздух-воздух. Наведение ракеты на цель — это управление её полётом таким образом, чтобы она оказалась в области встречи с целью. Цель, само собой, этой встречи не желает и может совершать различные маневры.
Так каким же образом методы наведения могут помочь в игростроении? Первое и основное, что может прийти на ум — это управление одним объектом в игре таким образом, чтобы он столкнулся с другим объектом. Например, самонаводящиеся снаряды, выпускаемые врагами в игрока, или же бот, который собирает двигающиеся в пространстве объекты… Ну или как управление ботом-хоккеистом в Russian AI Cup 2014, чтобы он побыстрее захватывал шайбу или бежал бить соперника).
Поскольку координаты у нас меняются не непрерывно, а дискретно, то областью встречи объекта с целью будем считать окружность с радиусом в перемещение объекта за шаг и с центром в координатах цели.
Итак, начнём с самого простого метода наведения, который многие наверняка использовали:
Метод прямого наведения
Принцип заключается в том, что на каждом шаге игрового цикла объект должен стремиться («смотреть») прямо на цель:
На изображении я постарался показать, что вектор скорости не всегда совпадает с линией визирования, несмотря на то, что объект постоянно «смотрит» на цель.
Это самый неэффективный метод среди рассматриваемых, поскольку с его помощью получается самая длинная и кривая траектория движения наводимого объекта. Также у этого метода самая большая вероятность срыва наведения. Однако, этот метод вполне себе применим — например, если не хочется, чтобы игроку приходилось сильно напрягаться, чтобы уйти от ракеты. Ну или у вас есть всего 30 секунд на реализацию.
Метод погони
При наведении этим методом на каждом шаге у объекта должны совпадать вектор скорости и направление на цель (линия визирования).
Ходит слух, что своё название метод погони получил потому, что на охоте собаки преследуют цель именно таким образом. Метод достаточно прост и даёт чуть лучшие результаты, чем метод прямого наведения.
Надо сказать, что если ваш объект мгновенно приобретает и теряет скорость, то два вышеперечисленных метода эквивалентны. Оба этих метода имеют модификацию: объект (вектор скорости) направляется не прямо на цель, а с неким углом упреждения. Это позволяет снизить кривизну траектории, а значит, увеличить эффективность наведения. Первые управляемые ракеты с автоматическим наведением использовали именно эти методы (например, в американской ракете Sidewinder использовался метод погони с постоянным углом упреждения).
Метод параллельного сближения
При этом методе объект постоянно стремится сохранить угол линии визирования цели (т.е. линии объект-цель).
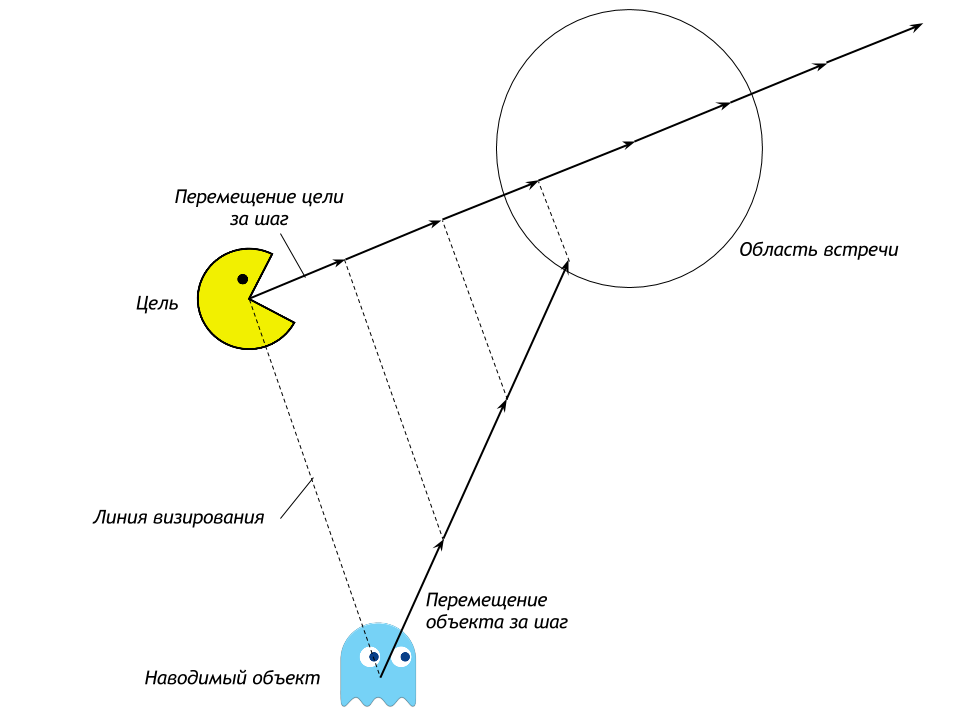
Если цель будет двигаться равномерно прямолинейно, то наш объект будет двигаться по самой эффективной траектории — по прямой, и время полёта до цели будет минимальным. Таким образом, этот метод — самый эффективный из перечисленных. Именно его я чаще всего и применяю, тем более что программная реализация получается гораздо проще, чем реализация в реальной жизни (нет ошибок измерения параметров, нет рассогласования между расчётной и реальной траекториями).
Метод пропорционального сближения
При наведении по этому методу угловая скорость вращения вектора скорости объекта будет пропорциональна угловой скорости вращения линии визирования цели, т.е.:
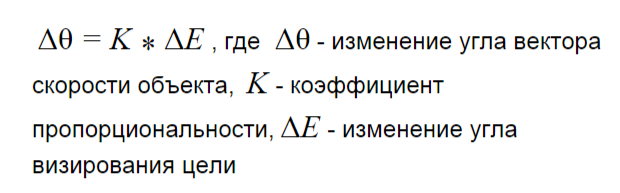
При этом коэффициент K можно подобрать эмпирическим путём (обычно это несколько единиц).
На самом деле, этот метод является общим методом наведения. Ведь если взять коэффициент пропорциональности К за 1, то мы получим метод погони (вектор скорости будет всегда направлен на цель), если же K=∞, то получится метод параллельного сближения.
Собственно, на этом обзор методов наведения заканчивается.
Надеюсь, статья окажется полезной, ну или по крайней мере небезынтересной.
Двухточечные методы наведения
К двухточечным методам наведения, определяющим взаимное движение двух геометрических точек (снаряд и цель) относятся [2,3,8]:
а) метод наведения по «кривой погони»;
б) методы наведения с упреждением.
Различные двухточечные методы наведения являются частными случаями пропорционального сближения. Сущность пропорционального сближения состоит в том, что в процессе управления угловая скорость вращения вектора скорости управляемого объекта поддерживается пропорциональной угловой скорости вращения линии снаряд-цель.
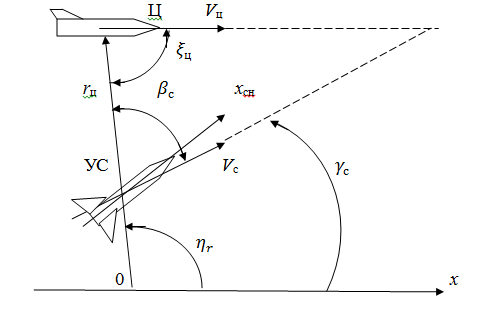
Рисунок 3.1 – Геометрические соотношения при 2-х точечных
УС – управляемый снаряд, Ц – цель, х – неподвижная ось координат
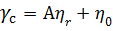
Воспользовавшись обозначениями рисунка 3.1, запишем сформулированное условие пропорционального сближения
 , (3.4)
, (3.4)
где А – коэффициент пропорциональности. Угол  определяет направление вектора скорости снаряда, а угол
определяет направление вектора скорости снаряда, а угол  — направление линии снаряд-цель. Угол
— направление линии снаряд-цель. Угол  между вектором скорости цели и линией снаряд-цель называют углом цели. xсн – продольная ось снаряда.
между вектором скорости цели и линией снаряд-цель называют углом цели. xсн – продольная ось снаряда.
Интегрируя уравнение (3.4), получим
 . (3.5)
. (3.5)
Заметим, что в частном случае А=1, угол —  будет представлять собой угол между вектором скорости снаряда и линией снаряд-цель (рисунок 3.1), т.е. угол упреждения
будет представлять собой угол между вектором скорости снаряда и линией снаряд-цель (рисунок 3.1), т.е. угол упреждения  . Следовательно в этом случае
. Следовательно в этом случае
 . (3.6)
. (3.6)
I. Положим теперь в выражении (3.5)  и =
и =  . Тогда получим
. Тогда получим
 . (3.7)
. (3.7)
В этом случае система управления должна работать таким образом, чтобы вектор скорости снаряда был постоянно направлен на цель (  ). Подобное условие соответствует методу наведения по «кривой погони» (чистое преследование).
). Подобное условие соответствует методу наведения по «кривой погони» (чистое преследование).
II. Если в уравнении (3.6) принять  , то получим метод наведения с постоянным углом упреждения. Этот метод обладает рядом недостатков, поэтому не находит широкого применения. Один из недостатков, сводится к тому, что при маневрах цели и изменениях соотношения скоростей снаряда и цели траектория полета может оказаться сильно искривленной, и перегрузки будут недопустимо велики.
, то получим метод наведения с постоянным углом упреждения. Этот метод обладает рядом недостатков, поэтому не находит широкого применения. Один из недостатков, сводится к тому, что при маневрах цели и изменениях соотношения скоростей снаряда и цели траектория полета может оказаться сильно искривленной, и перегрузки будут недопустимо велики.
III. Если в соотношении (3.4) положить
 =0 (3.8)
=0 (3.8)
(подобное равенство получится, если в соотношении (3.4) принять  ), то будем иметь так называемый метод параллельного сближения, или метод последовательных упреждений.
), то будем иметь так называемый метод параллельного сближения, или метод последовательных упреждений.
Очевидно, что условие (3.8) выполняется в том случае, когда вектор rц в процессе наведения перемещается параллельно самому себе (рисунок 3.1), что и определило название метода.
IV. Можно также осуществить наведение на основе непосредственного использования уравнения (3.4) при различных конечных значениях постоянной  (например, при
(например, при  ). Все эти методы носят общее название «пропорциональное сближение».
). Все эти методы носят общее название «пропорциональное сближение».
Все методы в процессе наведения требуют измерения скорости вращения линии снаряд-цель, т.е. измерения значения производной . Вследствие этого принципы аппаратурного построения системы управления для всех перечисленных методов во многом идентичны.
Пространственное движение ЛА можно полностью определить, если рассматривать проекции траектории на взаимно перпендикулярные плоскости (рисунок 1.15). Поскольку кинематические уравнения в плоскостях имеют одинаковый вид, для простоты можно рассмотреть траекторию движения в одной из плоскостей. Математическое описание кинематической траектории для различных методов наведения связано с решением ряда дифференциальных и тригонометрических уравнений. При решении этих уравнений желательно получить управляющую функцию  или закон отклонения кинематической траектории от прямой линии, соединяющей снаряд и цель в момент пуска. Управляющая функция может быть рассчитана или в угловых, или в линейных величинах в зависимости от метода управления снарядом.
или закон отклонения кинематической траектории от прямой линии, соединяющей снаряд и цель в момент пуска. Управляющая функция может быть рассчитана или в угловых, или в линейных величинах в зависимости от метода управления снарядом.
На рисунке 3.2 показаны траектории движения ЛА по кривой погони и при параллельном сближении. Траектории построены приближенно, графическим способом, на основании равенства  .
.
Из рисунка видно, что первая траектория сильно искривлена. Наведение
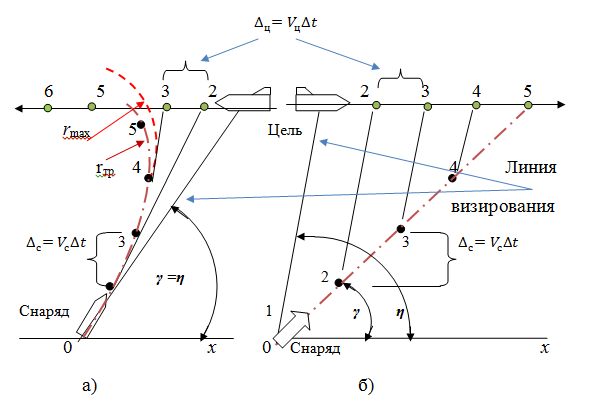
Рисунок 3.2 — Траектории движения ЛА при наведении
а) по кривой погони и б) при параллельном сближении
на быстро движущуюся цель методом кривой погони затруднительно, особенно при стрельбе навстречу, когда радиус кривизны траектории по мере приближения снаряда к цели стремится к нулю (  ). В этом случае снаряд, обладающий минимальным радиусом разворота (
). В этом случае снаряд, обладающий минимальным радиусом разворота (  ), сходит с кинематической траектории. Метод наведения по кривой погони имеет практическое значение в основном только для наведения на медленно движущиеся или неподвижные цели.
), сходит с кинематической траектории. Метод наведения по кривой погони имеет практическое значение в основном только для наведения на медленно движущиеся или неподвижные цели.
В методе параллельного сближения при прямолинейном движении цели и постоянном отношении скоростей цели и снаряда угол упреждения
 постоянен и кинематическая траектория будет прямолинейной (рисунок 3.2,б), т.е. снаряд не испытывает не испытывает поперечных перегрузок. В общем случае значение угла
постоянен и кинематическая траектория будет прямолинейной (рисунок 3.2,б), т.е. снаряд не испытывает не испытывает поперечных перегрузок. В общем случае значение угла  будет функцией времени, так как угол ξц , скорости снаряда и цели могут изменяться. Траектория снаряда при маневрах цели или при изменении скорости снаряда искривляются.
будет функцией времени, так как угол ξц , скорости снаряда и цели могут изменяться. Траектория снаряда при маневрах цели или при изменении скорости снаряда искривляются.
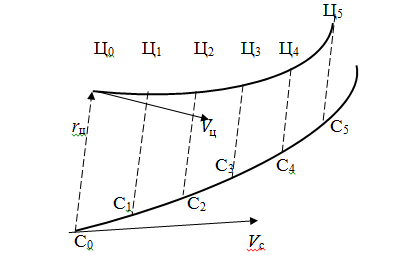
Рисунок 3.3 – Траектории при параллельном сближении
На рисунке 3.3 выдерживаются следующие очевидные равенства

Ошибка управления при методе параллельного сближения определяется как
 , (3.9)
, (3.9)
где — значение угла при исходном положении вектора скорости (должно подчиняться соотношению (3.10)), — фактическое значение угла между вектором скорости снаряда  и вектором
и вектором  . Вектор перемещается параллельно самому себе. Для этого должно выполняться условие
. Вектор перемещается параллельно самому себе. Для этого должно выполняться условие
 . (3.10)
. (3.10)
В первом приближении для случая  считается, что при наведении на маневрирующую цель с поперечным ускорением
считается, что при наведении на маневрирующую цель с поперечным ускорением  , снаряд должен следовать по таким траекториям, для которых потребуется максимальное поперечное ускорение, равное
, снаряд должен следовать по таким траекториям, для которых потребуется максимальное поперечное ускорение, равное  . Относительно небольшие перегрузки, испытываемые снарядом, являются существенным преимуществом метода параллельного сближения.
. Относительно небольшие перегрузки, испытываемые снарядом, являются существенным преимуществом метода параллельного сближения.
Дата добавления: 2017-09-01 ; просмотров: 4806 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
http://habr.com/ru/post/254485/
http://poznayka.org/s95026t1.html