Безусловная оптимизация. Метод наискорейшего спуска
Безусловная оптимизация. Метод наискорейшего спуска
Метод наискорейшего спуска (в англ. литературе «method of steepest descent») — это итерационный численный метод (первого порядка) решения оптимизационных задач, который позволяет определить экстремум (минимум или максимум) целевой функции:

 — это значения аргумента функции (управляемые параметры) на вещественной области.
— это значения аргумента функции (управляемые параметры) на вещественной области.
В соответствии с рассматриваемым методом экстремум (максимум или минимум) целевой функции определяют в направлении наиболее быстрого возрастания (убывания) функции, т.е. в направлении градиента (антиградиента) функции. Градиентом функции в точке называется вектор, проекциями которого на координатные оси являются частные производные функции по координатам:

где i, j,…, n — единичные векторы, параллельные координатным осям.
Градиент в базовой точке  строго ортогонален к поверхности, а его направление показывает направление наискорейшего возрастания функции, а противоположное направление (антиградиент), соответственно, показывает направление наискорейшего убывания функции.
строго ортогонален к поверхности, а его направление показывает направление наискорейшего возрастания функции, а противоположное направление (антиградиент), соответственно, показывает направление наискорейшего убывания функции.
Метод наискорейшего спуска является дальнейшим развитием метода градиентного спуска. В общем случае процесс нахождения экстремума функции является итерационной процедурой, которая записывается следующим образом:

где знак «+» используется для поиска максимума функции, а знак «-» используется для поиска минимума функции;
 — единичный вектор направления, который определяется по формуле:
— единичный вектор направления, который определяется по формуле:

 — модуль градиента определяет скорость возрастания или убывания функции в направлении градиента или антиградиента:
— модуль градиента определяет скорость возрастания или убывания функции в направлении градиента или антиградиента:

 — константа, определяющая размеры шага и одинаковая для всех i-х направлений.
— константа, определяющая размеры шага и одинаковая для всех i-х направлений.
Величина шага выбирается из условия минимума целевой функции f(х) в направлении движения, т. е. в результате решения задачи одномерной оптимизации в направлении градиента или антиградиента:

Другими словами, величину шага  определяют при решении данного уравнения:
определяют при решении данного уравнения:

Таким образом, шаг расчета выбирается такой величины, что движение выполняется до тех пор, пока происходит улучшение функции, достигая, таким образом, экстремума в некоторой точке. В этой точке вновь определяют направление поиска (с помощью градиента) и ищут новую точку оптимума целевой функции и т.д. Таким образом, в данном методе поиск происходит более крупными шагами, и градиент функции вычисляется в меньшем числе точек.
В случае функции двух переменных данный метод имеет следующую геометрическую интерпретацию: направление движения из точки  касается линии уровня в точке
касается линии уровня в точке  . Траектория спуска зигзагообразная, причем соседние звенья зигзага ортогональны друг другу. Условие ортогональности векторов направлений спуска в соседних точках записывается следующим выражением:
. Траектория спуска зигзагообразная, причем соседние звенья зигзага ортогональны друг другу. Условие ортогональности векторов направлений спуска в соседних точках записывается следующим выражением:


Рис.1. Траектория движения к точке экстремума при использовании метода наискорейшего спуска, изображенная на графике линии равного уровня функции f(x)
Поиск оптимального решения завершается в случае, когда на итерационном шаге расчета (несколько критериев):
— траектория поиска остается в малой окрестности текущей точки поиска:

— приращение целевой функции не меняется:

— градиент целевой функции в точке локального минимума обращается в нуль:

Следует отметить, что метод градиентного спуска оказывается очень медленным при движении по оврагу, причём при увеличении числа переменных целевой функции такое поведение метода становится типичным. Овраг представляет собой впадину, линии уровня которой приближенно имеют форму эллипсов с различающимися во много раз полуосями. При наличии оврага траектория спуска имеет вид зигзагообразной линии с малым шагом, вследствие чего результирующая скорость спуска к минимуму сильно замедляется. Это объясняется тем, что направление антиградиента этих функций существенно отклоняется от направления в точку минимума, что приводит к дополнительной задержке в расчете. В результате алгоритм теряет вычислительную эффективность.

Метод градиента вместе с его многочисленными модификациями является распространенным и эффективным методом поиска оптимума исследуемых объектов. Недостатком градиентного поиска (так же и рассмотренных выше методов) является то, что при его использовании можно обнаружить только локальный экстремум функции. Для отыскания других локальных экстремумов необходимо производить поиск из других начальных точек. Так же скорость сходимости градиентных методов существенно зависит также от точности вычислений градиента. Потеря точности, а это обычно происходит в окрестности точек минимума или в овражной ситуации, может вообще нарушить сходимость процесса градиентного спуска.
Методика расчета
• 1 шаг: Определение аналитические выражения (в символьном виде) для вычисления градиента функции 

• 2 шаг: Задаем начальное приближение 
Далее выполняется итерационный процесс.
• 3 шаг: Определяется необходимость рестарта алгоритмической процедуры для обнуления последнего направления поиска. В результате рестарта поиск осуществляется заново в направлении скорейшего спуска.
• 4 шаг: Вычисление координат единичного вектора  по представленным формулам
по представленным формулам

• 5 шаг: определяем шаг расчета из условия поиска экстремума для следующей функции  (решения задачи одномерной оптимизации).
(решения задачи одномерной оптимизации).

• 6 шаг: Определяем новые значения аргументов функции после выполнения k-го шага расчета:

где знак «+» используется для поиска максимума функции, а знак «-» используется для поиска минимума функции;
• 7 шаг: проверяем критерии останова итерационного процесса. Вычислительный процесс заканчивается, когда будет достигнута точка, в которой оценка градиента будет равна нулю (коэффициенты функции отклика становятся незначимыми). В противном случае возвращаемся к шагу 3 и продолжаем итерационный расчет.
Для того, чтобы добавить Ваш комментарий к статье, пожалуйста, зарегистрируйтесь на сайте.
3.8. Метод скорейшего спуска (градиента) для случая . системы линейных алгебраических уравнений
В рассматриваемом ниже итерационном методе вычислительный алгоритм строится таким образом, чтобы обеспечить минимальную погрешность на шаге (максимально приблизиться к корню).
Представим систему линейных уравнений в следующем виде:
 (3.38)
(3.38)
Запишем выражение (3.38) в операторной форме:
 (3.39)
(3.39)
Здесь приняты следующие обозначения:
 ;
;  ;
;  . (3.40)
. (3.40)
В методе скорейшего спуска решение ищут в виде
 , (3.41)
, (3.41)
Где  и
и  — векторы неизвестных на P и P+1 шагах итераций; вектор невязок на P-ом шаге определяется выражением
— векторы неизвестных на P и P+1 шагах итераций; вектор невязок на P-ом шаге определяется выражением
 , (3.42)
, (3.42)
А  (3.43)
(3.43)
В формуле (3.43) используется скалярное произведение двух векторов, которое определяется следующей формулой:
 (3.44)
(3.44)
В формуле (3.43)  — транспонированная матрица Якоби, вычисленная на P-ом шаге. Матрица Якоби вектор – функции F(X) определяется как
— транспонированная матрица Якоби, вычисленная на P-ом шаге. Матрица Якоби вектор – функции F(X) определяется как
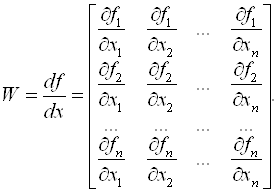 (3.45)
(3.45)
Нетрудно убедиться, что для системы (3.39) матрица Якоби равна
 (3.46)
(3.46)
Как и для метода простой итерации, достаточным условием сходимости метода градиента является преобладание диагональных элементов. В качестве нулевого приближения можно взять  .
.
· Как видно из выражения (3.45), матрица Якоби не зависит от шага итерации.
· Требования минимизации погрешности на каждом шаге обусловили то, что метод градиента более сложен (трудоемок), чем методы Якоби и Зейделя.
· В методе градиента итерационный процесс естественно закончить при достижении  , вектор невязок входит в вычислительную формулу.
, вектор невязок входит в вычислительную формулу.
· В приближенных методах можно обеспечить практически любую погрешность, если итерационный процесс сходится.
· Итерационный процесс можно прервать на любом K–ом шаге и продолжить позднее, введя в качестве нулевого шага значения X(K).
· В качестве недостатка приближенных методов можно отметить то, что они часто расходятся, достаточные условия сходимости (преобладание диагональных элементов) можно обеспечить только для небольших систем из 3 – 6 уравнений.
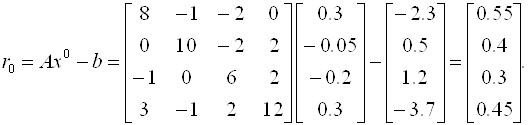
Пример 3.7. Методом скорейшего спуска решим систему уравнений
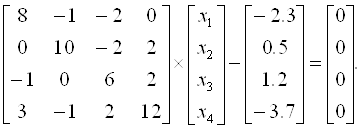
Так как диагональные элементы матрицы являются преобладающими, то в качестве начального приближения выберем:
Следовательно, вектор невязок на нулевом шаге равен
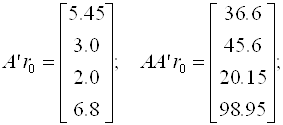
Далее последовательно вычисляем

Отсюда 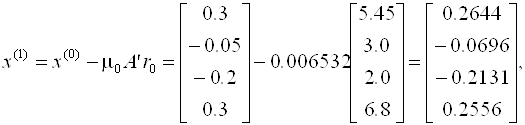
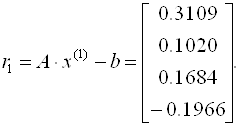
Аналогично находятся последующие приближения и оцениваются невязки. Что касается данного примера, можно отметить, что итерационный процесс сходится достаточно медленно (невязки уменьшаются).
Вопросы для самопроверки
· Назовите известные вам методы решения СЛАУ.
· Чем точные методы отличаются от приближенных?
· Что такое прямой и обратный ход в методе Гаусса?
· Нужен ли обратный ход при вычислении методом Гаусса а) обратной матрицы; б) определителя?
· Что такое невязка?
· Сравните достоинства и недостатки точных и приближенных методов.
· Что такое матрица Якоби?
· Надо ли пересчитывать матрицу Якоби на каждом шаге итерации в методе градиента?
· Исходная СЛАУ решается независимо тремя методами – методом Якоби, методом Зейделя и методом градиента. Будут ли равны значения
А) начального приближения (нулевой итерации);
Б) первой итерации?
· При решении СЛАУ (n > 100) итерационными методами решение расходится. Как найти начальное приближение?
Решение систем линейных алгебраических уравнений
Страницы работы



Содержание работы
Лабораторная работа №3
Решение систем линейных алгебраических уравнений
Практика использования итерационных методов решения системы линейных алгебраических уравнений. Сравнительный анализ методов.
Решить систему линейных алгебраических уравнений (САУ)
 ,
,  ,
,  ,
, 
итерационными методами Зейделя и наискорейшего спуска с точностью до e = 0,001. Для сравнения с истинными значениями корней выполнить решение указанной САУ методом Гаусса.
Общий вид алгоритма Зейделя и наискорейшего спуска
Метод Зейделя заключается в том, что найденное на  -ой итерации значение какой-либо компоненты вектора решения на этой же итерации используется для вычисления остальных компонент определяемого решения. Именно поэтому метод Зейделя называют одношаговым алгоритмом, он является представителем группы линейных алгоритмов первого порядка.
-ой итерации значение какой-либо компоненты вектора решения на этой же итерации используется для вычисления остальных компонент определяемого решения. Именно поэтому метод Зейделя называют одношаговым алгоритмом, он является представителем группы линейных алгоритмов первого порядка.
Расчетные соотношения метода Зейделя для подготовленной системы уравнений (4.13) имеют вид
 ,(4.18)
,(4.18)
 .
.
При составлении программы для вычислений на ЭВМ вместо соотношения (4.18) удобнее использовать выражение, в котором фигурируют элементы исходной системы уравнений
 ,
,
 .
.
Если матрица  симметрическая и положительно определенная, а подготовленная к итерациям система определяется в виде
симметрическая и положительно определенная, а подготовленная к итерациям система определяется в виде
 (4.13)
(4.13)
где  то метод Зейделя сходится. Если же диагональные элементы симметрической матрицы не отрицательны, то условие положительной определенности матрицы является и необходимым.
то метод Зейделя сходится. Если же диагональные элементы симметрической матрицы не отрицательны, то условие положительной определенности матрицы является и необходимым.
Из неособенной матрицы можно получить симметрическую положительно определенную матрицу путем первой трансформации Гауcса, что осуществляется за счет умножения слева на матрицу транспонированную левой и правой частей исходной системы алгебраических уравнений. При этом решаемая система принимает вид
 .
.
Метод наискорейшего спуска. Данный метод относится к группе нелинейных градиентных алгоритмов. Градиентные алгоритмы, уточнение решения в которых осуществлялось по отдельным координатам, предполагают траекторию движения к истинному решению сразу по всем координатам по линии наискорейшего спуска в направлении, противоположном вектору градиента функционала, связанного с ошибкой между истинным решением и решением на  -й итерации. Именно такой выбор направления обеспечивает наиболее быстрое убывание функционала ошибки. Вычислительная схема метода наискорейшего спуска выглядит следующим образом. Задаются некоторым начальным приближением
-й итерации. Именно такой выбор направления обеспечивает наиболее быстрое убывание функционала ошибки. Вычислительная схема метода наискорейшего спуска выглядит следующим образом. Задаются некоторым начальным приближением  (если нет никакой априорной информации, то полагают
(если нет никакой априорной информации, то полагают  ), а далее осуществляется итерационный процесс уточнения
), а далее осуществляется итерационный процесс уточнения
 , (4.19)
, (4.19)
где  — вектор невязки, представляющий собой ошибку в виде разности между правой и левой частями системы уравнений, компоненты которого определяются как
— вектор невязки, представляющий собой ошибку в виде разности между правой и левой частями системы уравнений, компоненты которого определяются как
 , (4.20)
, (4.20)
 . (4.21)
. (4.21)
Чтобы упростить процедуру определения вектора невязки, особенно при больших порядках  матрицы системы уравнений, рекомендуется вычислять его по формуле
матрицы системы уравнений, рекомендуется вычислять его по формуле
 .
.
Однако из-за наличия вычислительных погрешностей векторы после нескольких итераций могут отклоняться от истинных невязок и потому время от времени их следует корректировать по выражению (4.20).
Если матрица системы уравнений симметрическая и положительно определенная, то метод наискорейшего спуска сходится к истинному решению со скоростью геометрической прогрессии.
SUBROUTINE N1YMGS (A,B,N,G,X),
SUBROUTINE N1YMNS (A,B,N,G,X)
реализуют алгоритмы решения САУ методами Зейделя и наискорейшего спуска (одна итерация) соответственно.
Входные параметры подпрограмм:
А(N,N) — (N ´ N)-мерная матрица САУ;
B(N) — N-мерный вектор правой части САУ;
N — мерность САУ;
G(N) — N-мерный вектор невязки (g = b — Ax);
X(N) — N-мерный вектор начальных условий решения САУ.
Выходные параметры подпрограммы:
X(N) — N-мерный вектор уточненных значений решения САУ.
Окончание итерационной процедуры производиться при выполнении условия  , где
, где  , i
, i [1, n], k = 1, 2, 3, …,
[1, n], k = 1, 2, 3, …,
SUBROUTINE N1YGAU (A,B,X,N)
реализует алгоритм метода Гаусса с выбором главного элемента.
Входные A, B, N и выходной X параметры подпрограммы N1YGAU совпадают по описанию с аналогичными параметрами в подпрограммах N1YMGS, N1YMNS.
В подпрограмме N1YGAU матрица A приводится к треугольной.
http://matica.org.ua/metodichki-i-knigi-po-matematike/chislennye-metody-iu-ia-katcman/3-8-metod-skoreishego-spuska-gradienta-dlia-sluchaia—sistemy-lineinykh-algebraicheskikh-uravnenii
http://vunivere.ru/work36005