Метод исключения — сведение системы ДУ к одному уравнению
Частным случаем канонической системы дифференциальных уравнений является одно уравнение n-го порядка, разрешенное относительно старшей производной.
Введением новых функций
это уравнение заменяется нормальной системой уравнений
Можно утверждать и обратное, что, вообще говоря, нормальная система уравнений первого порядка
эквивалентна одному уравнению порядка . На этом основан один из методов интегрирования систем дифференциальных уравнений — метод исключения .
Проиллюстрируем этот метод на примере системы двух уравнений:
Здесь — постоянные коэффициенты, а и — заданные функции; и — искомые функции. Из первого уравнения системы (1) находим
Подставляя во второе уравнение системы вместо у правую часть (2), а вместо производную от правой части (2), получаем уравнение второго порядка относительно
где — постоянные. Отсюда находим . Подставив найденное выражение для и в (2), найдем .
Пример 1. Проинтегрировать систему уравнений
Решение. Из первого уравнения системы (3) находим , тогда
Подставляя (4) во второе уравнение системы (3), получаем линейное дифференциальное уравнение с постоянными коэффициентами второго порядка
Общее решение уравнения (5)
Находя производную по от (6), получаем
Общее решение системы (3):
Пример 2. Решить задачу Коши для системы
Решение. Из второго уравнения системы (7) находим
Подставляя (9) и (10) в первое уравнение системы (7), получаем уравнение , общее решение которого
Подставляя (11) в (9), найдем . Общее решение системы (7)
При начальных условиях (8) из (12) получим систему уравнений для определения
решая которую, найдем . Подставляя эти значения и в (12), получаем решение поставленной задачи Коши:
Пример 3. Решить систему уравнений
Решение. Из первого уравнения системы находим
Подставляя эти выражения для и во второе уравнение, получаем
Считая , из последнего уравнения имеем и после интегрирования получим . Теперь легко находим
Общее решение данной системы
Замечание. Не всякая система дифференциальных уравнений может быть сведена к одному уравнению более высокого порядка. Например,
не сводится к одному уравнению второго порядка. Ее общее решение .
Системы дифференциальных уравнений
Этот раздел мы решили посвятить решению систем дифференциальных уравнений простейшего вида d x d t = a 1 x + b 1 y + c 1 d y d t = a 2 x + b 2 y + c 2 , в которых a 1 , b 1 , c 1 , a 2 , b 2 , c 2 — некоторые действительные числа. Наиболее эффективным для решения таких систем уравнений является метод интегрирования. Также рассмотрим решение примера по теме.
Решением системы дифференциальных уравнений будет являться пара функций x ( t ) и y ( t ) , которая способна обратить в тождество оба уравнения системы.
Рассмотрим метод интегрирования системы ДУ d x d t = a 1 x + b 1 y + c 1 d y d t = a 2 x + b 2 y + c 2 . Выразим х из 2 -го уравнения системы для того, чтобы исключить неизвестную функцию x ( t ) из 1 -го уравнения:
d y d t = a 2 x + b 2 y + c 2 ⇒ x = 1 a 2 d y d t — b 2 y — c 2
Выполним дифференцирование 2 -го уравнения по t и разрешим его уравнение относительно d x d t :
d 2 y d t 2 = a 2 d x d t + b 2 d y d t ⇒ d x d t = 1 a 2 d 2 y d t 2 — b 2 d y d t
Теперь подставим результат предыдущих вычислений в 1 -е уравнение системы:
d x d t = a 1 x + b 1 y + c 1 ⇒ 1 a 2 d 2 y d t 2 — b 2 d y d t = a 1 a 2 d y d t — b 2 y — c 2 + b 1 y + c 1 ⇔ d 2 y d t 2 — ( a 1 + b 2 ) · d y d t + ( a 1 · b 2 — a 2 · b 1 ) · y = a 2 · c 1 — a 1 · c 2
Так мы исключили неизвестную функцию x ( t ) и получили линейное неоднородное ДУ 2 -го порядка с постоянными коэффициентами. Найдем решение этого уравнения y ( t ) и подставим его во 2 -е уравнение системы. Найдем x ( t ) . Будем считать, что на этом решение системы уравнений будет закончено.
Найдите решение системы дифференциальных уравнений d x d t = x — 1 d y d t = x + 2 y — 3
Начнем с первого уравнения системы. Разрешим его относительно x :
x = d y d t — 2 y + 3
Теперь выполним дифференцирование 2 -го уравнения системы, после чего разрешим его относительно d x d t : d 2 y d t 2 = d x d t + 2 d y d t ⇒ d x d t = d 2 y d t 2 — 2 d y d t
Полученный в ходе вычислений результат мы можем подставить в 1 -е уравнение системы ДУ:
d x d t = x — 1 d 2 y d t 2 — 2 d y d t = d y d t — 2 y + 3 — 1 d 2 y d t 2 — 3 d y d t + 2 y = 2
В результате преобразований мы получили линейное неоднородное дифференциальное уравнение 2 -го порядка с постоянными коэффициентами d 2 y d t 2 — 3 d y d t + 2 y = 2 . Если мы найдем его общее решение, то получим функцию y ( t ) .
Общее решение соответствующего ЛОДУ y 0 мы можем найти путем вычислений корней характеристического уравнения k 2 — 3 k + 2 = 0 :
D = 3 2 — 4 · 2 = 1 k 1 = 3 — 1 2 = 1 k 2 = 3 + 1 2 = 2
Корни, которые мы получили, являются действительными и различными. В связи с этим общее решение ЛОДУ будет иметь вид y 0 = C 1 · e t + C 2 · e 2 t .
Теперь найдем частное решение линейного неоднородного ДУ y
d 2 y d t 2 — 3 d y d t + 2 y = 2
Правая часть записи уравнения представляет собой многочлен нулевой степени. Это значит, что частное решение будем искать в виде y
= A , где А – это неопределенный коэффициент.
Определить неопределенный коэффициент мы можем из равенства d 2 y
= 2 :
d 2 ( A ) d t 2 — 3 d ( A ) d t + 2 A = 2 ⇒ 2 A = 2 ⇒ A = 1
Таким образом, y
= 1 и y ( t ) = y 0 + y
= C 1 · e t + C 2 · e 2 t + 1 . Одну неизвестную функцию мы нашли.
Теперь подставим найденную функцию во 2 -е уравнение системы ДУ и разрешим новое уравнение относительно x ( t ) :
d ( C 1 · e t + C 2 · e 2 t + 1 ) d t = x + 2 · ( C 1 · e t + C 2 · e 2 t + 1 ) — 3 C 1 · e t + 2 C 2 · e 2 t = x + 2 C 1 · e t + 2 C 2 · e 2 t — 1 x = — C 1 · e t + 1
Так мы вычислили вторую неизвестную функцию x ( t ) = — C 1 · e t + 1 .
Ответ: x ( t ) = — C 1 · e t + 1 y ( t ) = C 1 · e t + C 2 · e 2 t + 1
Сведение к системе дифференциального уравнения 2-ой степени в Xcos
Способ 2: сведение к системе в форме Коши
Рассмотрим более привычный и распространённый способ численного интегрирования обыкновенных дифференциальных уравнений n-го порядка: сведение к системе из n уравнений 1-го порядка, или, как ещё говорят, к нормальной форме или форме Коши.
Решение систем ОДУ без использования визульных блоков, было рассмотрено ранее в материале.
Рассмотрим дифференциальное уравнение второго порядка с заданными начальными условиями:
Введём замену переменных, сводящих уравнение (1) к системе из двух уравнений первой степени:
\begin
получим систему в новых фазовых переменных
(2)\begin
Данную систему нам и необходимо замоделировать. Итак, разберём, какие из функциональных бликов Xcos понадобятся, чтобы найти решение задачи Коши системы из двух дифференциальных уравнений 1-ой степени (2) с начальными условиями (3).
Система (2) содержит два д.у. первого порядка, а значит нам понадобятся два блока интегратора. Здесь и в дальнейшем для моделирования дифференциальных уравнений, вместо INTEGRAL_f, будем использовать блок 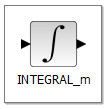 с палитры «Системы с непрерывным временем». Смысловая нагрузка у блока INTEGRAL_m та же, что и у используемого ранее INTEGRAL_f, — поиск первообразной сигнала, подающегося на его вход. Однако блок INTEGRAL_m во-первых, более нагляден, а во-вторых, имеет большее количество настраиваемых внутренних параметров блока.
с палитры «Системы с непрерывным временем». Смысловая нагрузка у блока INTEGRAL_m та же, что и у используемого ранее INTEGRAL_f, — поиск первообразной сигнала, подающегося на его вход. Однако блок INTEGRAL_m во-первых, более нагляден, а во-вторых, имеет большее количество настраиваемых внутренних параметров блока.
Итак, приступим к сбору функциональной блок-схемы, реализующей поиск численного решения системы дифференциальных уравнений (2), удовлетворяющего начальным условиям (3). Для создания блок-схемы нам потребуется:
Добавить два блока INTEGRAL_m на рабочую область, дав им названия соответствующих фазовых переменных и задать во внутренних параметрах блоков INTEGRAL_m значения параметра Initial condition (начальные условия), указанные в (7б). Результатом данных действий будет схема, изображенная на рис.38;
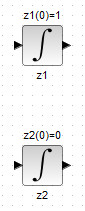
Рисунок 38. Блоки интеграторов с заданными начальными условиями
Собирать уравнения системы (2) необходимо, начиная с последнего и двигаясь вверх. Второе уравнение системы (2) имеет вид \(z_2′ = -2z_2+0.3z_1 \)и представляет собой сумму двух слагаемых с разными знаками, первое из которых увеличено в 2 раза, а второе в 0.3 раз.
Поэтому нам потребуется добавить блок сумматора BIGSOM_f, во внутренних параметрах которого указан знаков слагаемых [-1;1] и блоки усилителя GAINBLK_f со значениями 2 и 3 соответственно.
Далее необходимо составить правую част рассматриваемого уравнения, то есть подать на вход BIGSOM_f, советующие слагаемые, как показано на рис. 39.
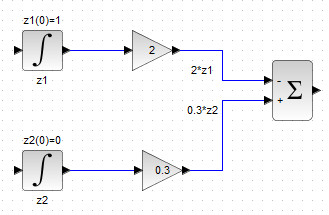
Рисунок 39. Блок-схема правой части второго диф.уравнения системы (2)
Итак, мы получили в сумматоре выражение, которые необходимо проинтегрировать, то есть подать на вход блока-интегратора INTEGRAL_m , соответствующего фазовой переменной, производная которой стоит в левой части рассматриваемого уравнения. В уравнении \(z_2′ = -2z_2+0.3z_1 \) слева стоит \(z_2′ \), а значит, выход сумматора нужно подсоединить ко входу интегратора, отвечающего за переменную \(z_2 \)(см. рис. 40).
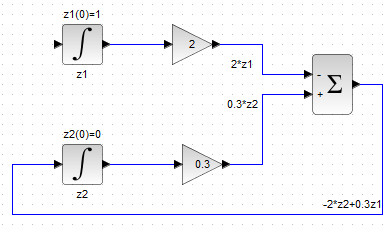
Рисунок 40. Вывод выхода сумматора на вход интегратора
Перейдём к построению первого уравнения системы (2), имеющего вид \(z_1’=z_2 \). Фазовая переменная \(z_2 \) формируется как выход соответствующего блока интегратора. Распараллелим выход нижнего блока INTEGRAL_m , подав его на вход верхнего блока INTEGRAL_m , который соответствует фазовой переменной \(z_1 \). В результате получим схему, изображенную на рисунке 41.
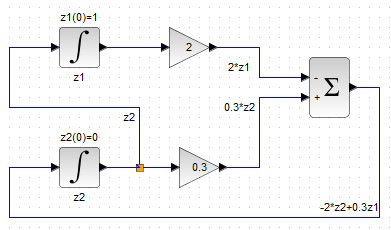
Рисунок 41. Блок-схема замкнутой системы двух д.у. 1-ой степени (2)
Далее нам потребуется вывести графики фазовых переменных \(z_1, z_2 \), для этого добавьте блоки CMSCOPE, END и CLOCK_c на рабочую область.
По традиции, во внутренних параметрах блока END указать время 10сек., на функциональный вход блока CMSCOPE нужно подать выход блока CLOCK_c с параметрами Period = 0.1, Время инициализации=0, а на регулярные входы осциллографа подать распараллеленные интегральные выходы, соответствующие фазовым переменным (рис. 42).
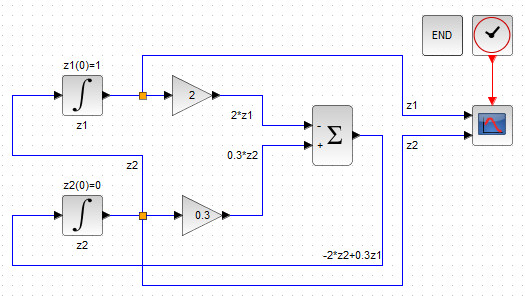
Рисунок 42. Блок-схема поиска численного задачи Коши (2-3) с выводом графиков фазовых переменных
После запуска моделирования и настройки параметров осциллографа, получим графики (рис. 43).
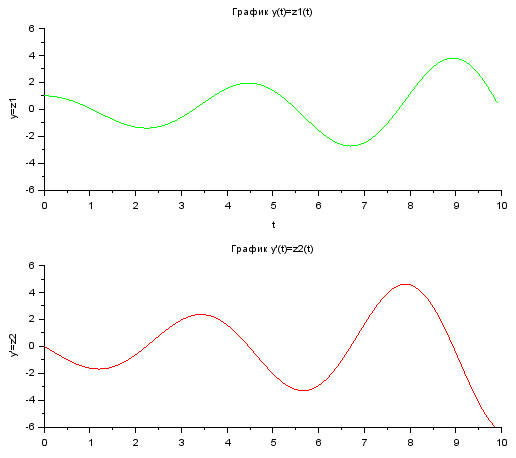
Рисунок 43. Графическое решение задачи Коши (2-3)
Итак, основными принципами второго способа численного интегрирования дифференциальных уравнений порядка выше 1 являются:
Сведение дифференциального уравнения n-ой к системе из n уравнений 1-ой степени, путём замены переменных;
Движение снизу вверх при визуализации уравнений получившейся системы;
Параллельное включение в схему блоков INTEGRAL_m, отвечающих за фазовые переменные системы;
Отображение результата численного моделирования на системах координат фазовая переменная – время;
Задание начальных условий в соответствующих блоках-интеграторах;
Задание отрезка интегрирования во внутренних параметрах блока END, начальной точки и шага дискретизации в блоке CLOCK_c;
Возможность выбора численного метода поиска решения дифференциального уравнения в настройкам параметров интегрирования.
http://zaochnik.com/spravochnik/matematika/differentsialnye-uravnenija/sistemy-differentsialnyh-uravnenij/
http://inclab.ru/xcos/svedenie-k-sisteme-v-forme-koshi