Метод верле решение дифференциального уравнения
Дифференциальным уравнением первого порядка называется уравнение вида F(x,y,у’)=0 или у’=f(x,y). Функция y(x), при подстановке которой уравнение обращается в тождество, называется решением дифференциального уравнения.
Рассмотрим несколько численных методов решения дифференциальных уравнений первого порядка. Описание численных методов приводится для уравнения в виде у’=f(x,y).
Рассмотрим два варианта вывода расчетных формул
Сравнение методов интегрирования уравнений динамики цепочки
Семестр: осень 2018
Содержание
Постановка задачи [ править ]
Рассматривается одномерная цепочка элементов, состоящая из частиц с одинаковыми массами m. Термин «одномерная цепочка» означает совокупность расположенных вдоль прямой линии N материальных частиц.. Рассматриваются продольные колебания образующих цепочку частиц под действием сил взаимодействия между частицами цепочки. Движение частицы с номером n описывается зависимостью от времени t её смещения относительно положения равновесия этой частицы (узла цепочки с номером n). Примем в качестве положительных смещения атомов вправо от положения равновесия, а отрицательных – влево. Каждый атом смещается только вдоль цепочки, что следует из требования одномерности модели. Такие смещения характерны для продольной волны.
Решение [ править ]
Каждый атом смещается только вдоль цепочки, что следует из требования одномерности модели. Пусть атомы связаны между собой упругой силой F с коэффициентом упругости с. Найдем уравнение движения n-го и n+1-го атома в цепи. В равновесном положении силы, действующие на атомы, равны нулю. При произвольных смещениях на каждый n-й атом будет действовать сила со стороны соседних атомов. Уравнение движения имеет вид:
где С — жёсткость одной пружинки, m — масса одной частицы, [math] <\bf U>_ [/math] — перемещение частицы, a — расстояние между двумя соседними частицами в начальный момент времени.
Период одного колебания: [math]
Методы Верле, Эйлера и Рунге-Кутта [ править ]
Метод Эйлера — простейший численный метод решения систем обыкновенных дифференциальных уравнений. Метод Эйлера является явным, одношаговым методом первого порядка точности. Он основан на аппроксимации интегральной кривой кусочно-линейной функцией, так называемой ломаной Эйлера.
Наиболее часто используется и реализован в различных математических пакетах классический метод Рунге — Кутты, имеющий четвёртый порядок точности. При выполнении расчётов с повышенной точностью всё чаще применяются методы пятого и шестого порядков точности. Построение схем более высокого порядка сопряжено с большими вычислительными трудностями.
Среди наиболее известных методов интегрирования уравнений движения можно выделить алгоритм Верле. Рассмотрим построение алгоритма Верле, для простоты, в одномерном виде. Основная идея алгоритма Верле состоит в записи разложения положения частицы.
Численное решение [ править ]
Построим графики зависимости безразмерной энергии от безразмерного времени для 100000 частиц с шагом по времени dt = 0.01 и 5000 шагов интегрирования. По оси абсцисс откладывается время, отнесенное к периоду, по оси ординат — энергия, отнесенное к начальной энергии системы.
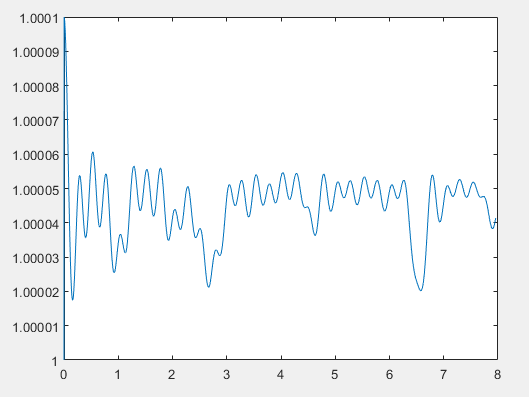
Численное решение методом Верле
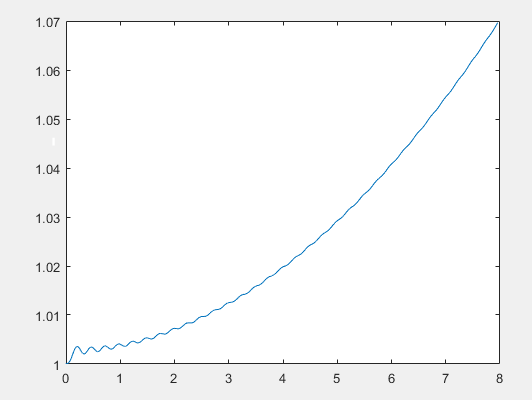
Численное решение методом Эйлера
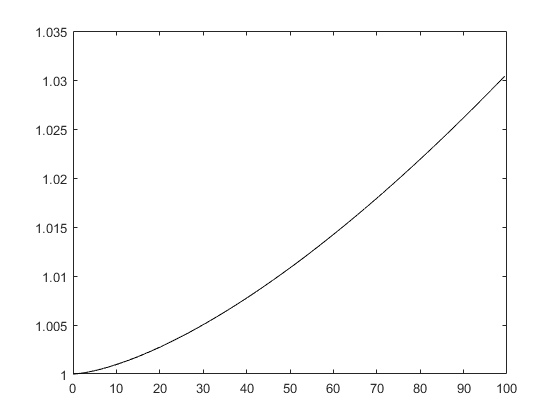
Численное решение методом Рунге-Кутта 4 порядка
Результаты [ править ]
Метод Верле является симплектическим, то есть сохраняющим энергию с течением времени. Это можно проследить из графика, безразмерная энергия колеблется в пределах единицы. Методы Эйлера и Рунге-Кутта 4 порядка энергию не сохраняют, что заметно из возрастания графиков.
Численное решение математических моделей объектов заданных системами дифференциальных уравнений
Введение:
При математическом моделировании ряда технических устройств используются системы дифференциальных нелинейных уравнений. Такие модели используются не только в технике, они находят применение в экономике, химии, биологии, медицине, управлении.
Исследование функционирования таких устройств требуют решения указанных систем уравнений. Поскольку основная часть таких уравнений являются нелинейными и нестационарными, часто невозможно получить их аналитическое решение.
Возникает необходимость использовать численные методы, наиболее известным из которых является метод Рунге — Кутты [1]. Что касается Python, то в публикациях по численным методам, например [2,3], данных по применение Рунге — Кутты крайне мало, а по его модификации — методу Рунге-Кутта-Фельберга вообще нет.
В настоящее время, благодаря простому интерфейсу, наибольшее распространение в Python имеет функцию odeint из модуля scipy.integrate. Вторая функция ode из этого модуля реализует несколько методов, в том числе и упомянутый пятиранговый метод Рунге-Кутта-Фельберга, но, вследствие универсальности, имеет ограниченное быстродействие.
Целью настоящей публикации является сравнительный анализ перечисленных средств численного решения систем дифференциальных уравнений с модифицированным автором под Python методом Рунге-Кутта-Фельберга. В публикации так же приведены решения по краевым задачам для систем дифференциальных уравнений (СДУ).
Краткие теоретические и фактические данные по рассматриваемым методам и программным средствам для численного решения СДУ
Для одного дифференциального уравнения n – го порядка, задача Коши состоит в нахождении функции, удовлетворяющей равенству:

и начальным условиям

Перед решением эта задача должна быть переписана в виде следующей СДУ
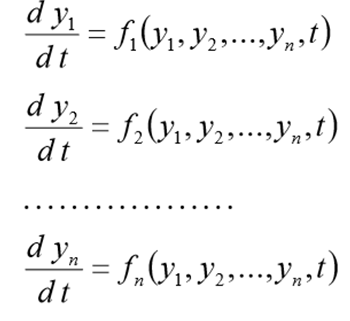 (1)
(1)
с начальными условиями

Модуль имеет две функции ode() и odeint(), предназначенные для решения систем обыкновенных дифференциальных уравнений (ОДУ) первого порядка с начальными условиями в одной точке (задача Коши). Функция ode() более универсальная, а функция odeint() (ODE integrator) имеет более простой интерфейс и хорошо решает большинство задач.
Функция odeint() имеет три обязательных аргумента и много опций. Она имеет следующий формат odeint(func, y0, t[,args=(), . ]) Аргумент func – это имя Python функции двух переменных, первой из которых является список y=[y1,y2. yn], а второй – имя независимой переменной.
Функция func должна возвращать список из n значений функций  при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
Второй аргумент y0 функции odeint() является массивом (или списком) начальных значений  при t=t0.
при t=t0.
Третий аргумент является массивом моментов времени, в которые вы хотите получить решение задачи. При этом первый элемент этого массива рассматривается как t0.
Функция odeint() возвращает массив размера len(t) x len(y0). Функция odeint() имеет много опций, управляющих ее работой. Опции rtol (относительная погрешность) и atol (абсолютная погрешность) определяют погрешность вычислений ei для каждого значения yi по формуле

Они могут быть векторами или скалярами. По умолчанию

Вторая функция модуля scipy.integrate, которая предназначена для решения дифференциальных уравнений и систем, называется ode(). Она создает объект ОДУ (тип scipy.integrate._ode.ode). Имея ссылку на такой объект, для решения дифференциальных уравнений следует использовать его методы. Аналогично функции odeint(), функция ode(func) предполагает приведение задачи к системе дифференциальных уравнений вида (1) и использовании ее функции правых частей.
Отличие только в том, что функция правых частей func(t,y) первым аргументом принимает независимую переменную, а вторым – список значений искомых функций. Например, следующая последовательность инструкций создает объект ODE, представляющий задачу Коши.
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
При численном решении задачи Коши
 (2)
(2)
 (3)
(3)
по известному решению в точке t =0 необходимо найти из уравнения (3) решение при других t. При численном решении задачи (2),(3) будем использовать равномерную, для простоты, сетку по переменной t с шагом т > 0.
Приближенное решение задачи (2), (3) в точке  обозначим
обозначим  . Метод сходится в точке
. Метод сходится в точке  если
если  при
при  . Метод имеет р-й порядок точности, если
. Метод имеет р-й порядок точности, если  , р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
, р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
 (4)
(4)
При  имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема
имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема  в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
Явные схемы второго и более высокого порядка аппроксимации удобно строить, ориентируясь на метод предиктор-корректор. На этапе предиктора (предсказания) используется явная схема
 (5)
(5)
а на этапе корректора (уточнения) — схема

В одношаговых методах Рунге—Кутта идеи предиктора-корректора реализуются наиболее полно. Этот метод записывается в общем виде:
 (6),
(6),

Формула (6) основана на s вычислениях функции f и называется s-стадийной. Если  при
при  имеем явный метод Рунге—Кутта. Если при j>1 и
имеем явный метод Рунге—Кутта. Если при j>1 и  то
то  определяется неявно из уравнения:
определяется неявно из уравнения:
 (7)
(7)
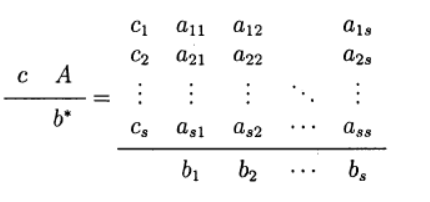
О таком методе Рунге—Кутта говорят как о диагонально-неявном. Параметры  определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
Одним из наиболее распространенных является явный метод Рунге—Кутта четвертого порядка
 (8)
(8)
Метод Рунге—Кутта— Фельберга
Привожу значение расчётных коэффициентов метода
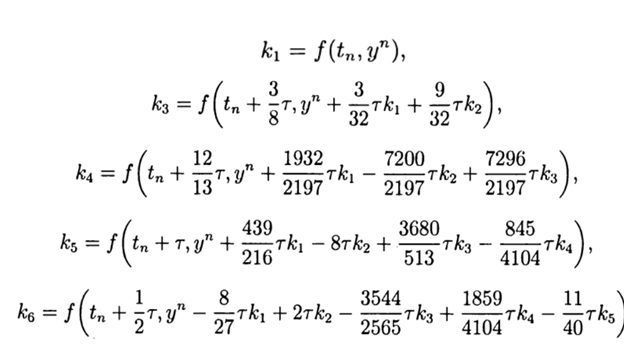 (9)
(9)
С учётом(9) общее решение имеет вид:
 (10)
(10)
Это решение обеспечивает пятый порядок точности, остаётся его адаптировать к Python.
Вычислительный эксперимент по определению абсолютной погрешности численного решения нелинейного дифференциального уравнения  с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
 с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга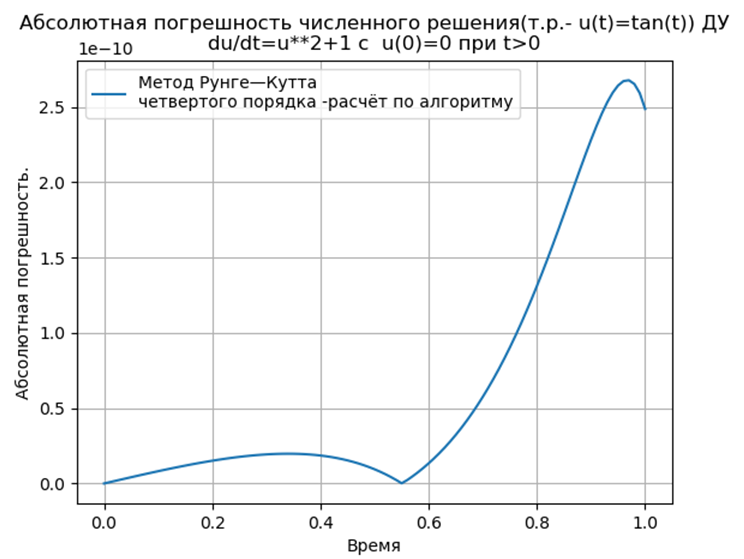


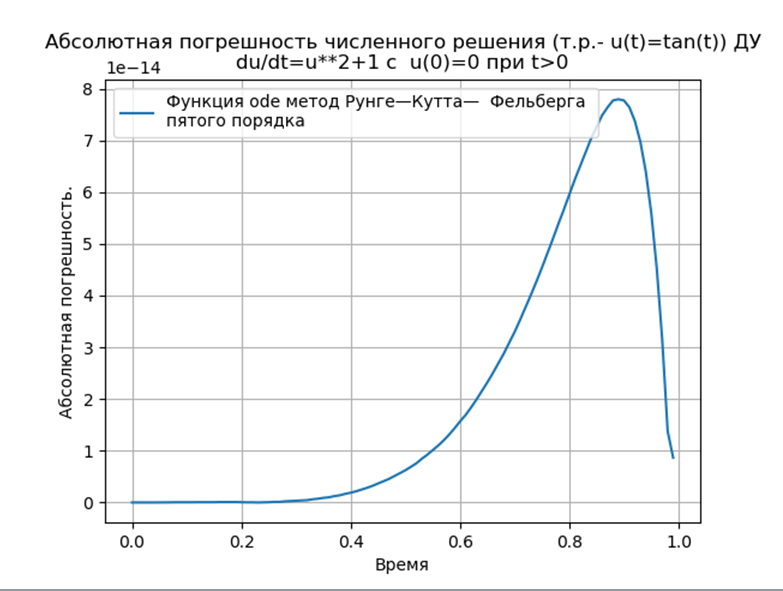
Адаптированные к Python методы Рунге—Кутта и Рунге—Кутта— Фельберга имеют меньшую абсолютную, чем решение с применением функции odeint, но большую, чем с использованием функции edu. Необходимо провести исследование быстродействия.
Численный эксперимент по сравнению быстродействия численного решения СДУ при использовании функции ode с атрибутом dopri5 (метод Рунге – Кутты 5 порядка) и с использованием адаптированного к Python метода Рунге—Кутта— Фельберга
Сравнительный анализ проведём на примере модельной задачи, приведенной в [2]. Чтобы не повторять источник, приведу постановку и решение модельной задачи из [2].
Решим задачу Коши, описывающую движение тела, брошенного с начальной скоростью v0 под углом α к горизонту в предположении, что сопротивление воздуха пропорционально квадрату скорости. В векторной форме уравнение движения имеет вид

где  – радиус вектор движущегося тела,
– радиус вектор движущегося тела,  – вектор скорости тела,
– вектор скорости тела,  – коэффициент сопротивления, вектор
– коэффициент сопротивления, вектор  силы веса тела массы m, g – ускорение свободного падения.
силы веса тела массы m, g – ускорение свободного падения.
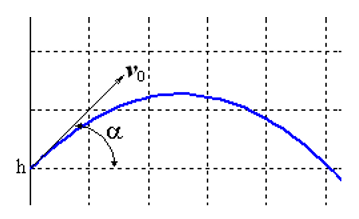
Особенность этой задачи состоит в том, что движение заканчивается в заранее неизвестный момент времени, когда тело падает на землю. Если обозначить  , то в координатной форме мы имеем систему уравнений:
, то в координатной форме мы имеем систему уравнений:
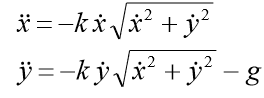
К системе следует добавить начальные условия:  (h начальная высота),
(h начальная высота),  . Положим
. Положим  . Тогда соответствующая система ОДУ 1 – го порядка примет вид:
. Тогда соответствующая система ОДУ 1 – го порядка примет вид:

Для модельной задачи положим  . Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
. Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
Flight time = 1.2316 Distance = 5.9829 Height =1.8542
Flight time = 1.1016 Distance = 4.3830 Height =1.5088
Flight time = 1.0197 Distance = 3.5265 Height =1.2912
Flight time = 0.9068 Distance = 2.5842 Height =1.0240
Время на модельную задачу: 0.454787

Для реализации средствами Python численного решения СДУ без использования специальных модулей, мною была предложена и исследована следующая функция:
def increment(f, t, y, tau
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
Функция increment(f, t, y, tau) обеспечивает пятый порядок численного метода решения. Остальные особенности программы можно посмотреть в следующем листинге:
Время на модельную задачу: 0.259927

Предложенная программная реализация модельной задачи без использования специальных модулей имеет почти в двое большее быстродействие, чем с функцией ode, однако нельзя забывать, что ode имеет более высокую точность численного решения и возможности выбора метода решения.
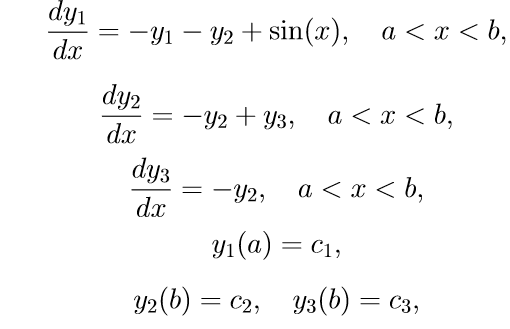
Решение краевой задачи с поточно разделёнными краевыми условиями
Приведем пример некоторой конкретной краевой задачи с поточно разделенными краевыми условиями:
 (11)
(11)
Для решения задачи (11) используем следующий алгоритм:
1. Решаем первые три неоднородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
2. Решаем первые три однородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
3. Решаем первые три однородные уравнения системы (11) с начальными условиями

Введем обозначение для решения задачи Коши:

4. Общее решение краевой задачи (11) при помощи решений задач Коши записывается в виде линейной комбинации решений: 
где p2, p3 — некоторые неизвестные параметры.
5. Для определения параметров p2, p3, используем краевые условия последних двух уравнений (11), то есть условия при x = b. Подставляя, получим систему линейных уравнений относительно неизвестных p2, p3:
 (12)
(12)
Решая (12), получим соотношения для p2, p3.
По приведенному алгоритму с применением метода Рунге—Кутта—Фельберга получим следующую программу:
y0[0]= 0.0
y1[0]= 1.0
y2[0]= 0.7156448588231397
y3[0]= 1.324566562303714
y0[N-1]= 0.9900000000000007
y1[N-1]= 0.1747719838716767
y2[N-1]= 0.8
y3[N-1]= 0.5000000000000001
Время на модельную задачу: 0.070878

Вывод
Разработанная мною программа отличается от приведенной в [3] меньшей погрешностью, что подтверждает приведенный в начале статьи сравнительный анализ функции odeint с реализованным на Python метода Рунге—Кутта—Фельберга.
3. Н.М. Полякова, Е.В. Ширяева Python 3. Создание графического интерфейса пользователя (на примере решения методом пристрелки краевой задачи для линейных обыкновенных дифференциальных уравнений). Ростов-на-Дону 2017.
http://tm.spbstu.ru/%D0%A1%D1%80%D0%B0%D0%B2%D0%BD%D0%B5%D0%BD%D0%B8%D0%B5_%D0%BC%D0%B5%D1%82%D0%BE%D0%B4%D0%BE%D0%B2_%D0%B8%D0%BD%D1%82%D0%B5%D0%B3%D1%80%D0%B8%D1%80%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F_%D1%83%D1%80%D0%B0%D0%B2%D0%BD%D0%B5%D0%BD%D0%B8%D0%B9_%D0%B4%D0%B8%D0%BD%D0%B0%D0%BC%D0%B8%D0%BA%D0%B8_%D1%86%D0%B5%D0%BF%D0%BE%D1%87%D0%BA%D0%B8
http://habr.com/ru/post/418139/