Численное решение математических моделей объектов заданных системами дифференциальных уравнений
Введение:
При математическом моделировании ряда технических устройств используются системы дифференциальных нелинейных уравнений. Такие модели используются не только в технике, они находят применение в экономике, химии, биологии, медицине, управлении.
Исследование функционирования таких устройств требуют решения указанных систем уравнений. Поскольку основная часть таких уравнений являются нелинейными и нестационарными, часто невозможно получить их аналитическое решение.
Возникает необходимость использовать численные методы, наиболее известным из которых является метод Рунге — Кутты [1]. Что касается Python, то в публикациях по численным методам, например [2,3], данных по применение Рунге — Кутты крайне мало, а по его модификации — методу Рунге-Кутта-Фельберга вообще нет.
В настоящее время, благодаря простому интерфейсу, наибольшее распространение в Python имеет функцию odeint из модуля scipy.integrate. Вторая функция ode из этого модуля реализует несколько методов, в том числе и упомянутый пятиранговый метод Рунге-Кутта-Фельберга, но, вследствие универсальности, имеет ограниченное быстродействие.
Целью настоящей публикации является сравнительный анализ перечисленных средств численного решения систем дифференциальных уравнений с модифицированным автором под Python методом Рунге-Кутта-Фельберга. В публикации так же приведены решения по краевым задачам для систем дифференциальных уравнений (СДУ).
Краткие теоретические и фактические данные по рассматриваемым методам и программным средствам для численного решения СДУ
Для одного дифференциального уравнения n – го порядка, задача Коши состоит в нахождении функции, удовлетворяющей равенству:

и начальным условиям
Перед решением эта задача должна быть переписана в виде следующей СДУ
(1)
с начальными условиями
Модуль имеет две функции ode() и odeint(), предназначенные для решения систем обыкновенных дифференциальных уравнений (ОДУ) первого порядка с начальными условиями в одной точке (задача Коши). Функция ode() более универсальная, а функция odeint() (ODE integrator) имеет более простой интерфейс и хорошо решает большинство задач.
Функция odeint() имеет три обязательных аргумента и много опций. Она имеет следующий формат odeint(func, y0, t[,args=(), . ]) Аргумент func – это имя Python функции двух переменных, первой из которых является список y=[y1,y2. yn], а второй – имя независимой переменной.
Функция func должна возвращать список из n значений функций при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
Второй аргумент y0 функции odeint() является массивом (или списком) начальных значений при t=t0.
Третий аргумент является массивом моментов времени, в которые вы хотите получить решение задачи. При этом первый элемент этого массива рассматривается как t0.
Функция odeint() возвращает массив размера len(t) x len(y0). Функция odeint() имеет много опций, управляющих ее работой. Опции rtol (относительная погрешность) и atol (абсолютная погрешность) определяют погрешность вычислений ei для каждого значения yi по формуле
Они могут быть векторами или скалярами. По умолчанию
Вторая функция модуля scipy.integrate, которая предназначена для решения дифференциальных уравнений и систем, называется ode(). Она создает объект ОДУ (тип scipy.integrate._ode.ode). Имея ссылку на такой объект, для решения дифференциальных уравнений следует использовать его методы. Аналогично функции odeint(), функция ode(func) предполагает приведение задачи к системе дифференциальных уравнений вида (1) и использовании ее функции правых частей.
Отличие только в том, что функция правых частей func(t,y) первым аргументом принимает независимую переменную, а вторым – список значений искомых функций. Например, следующая последовательность инструкций создает объект ODE, представляющий задачу Коши.
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
При численном решении задачи Коши
(2)
(3)
по известному решению в точке t =0 необходимо найти из уравнения (3) решение при других t. При численном решении задачи (2),(3) будем использовать равномерную, для простоты, сетку по переменной t с шагом т > 0.
Приближенное решение задачи (2), (3) в точке обозначим . Метод сходится в точке если при . Метод имеет р-й порядок точности, если , р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
(4)
При имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
Явные схемы второго и более высокого порядка аппроксимации удобно строить, ориентируясь на метод предиктор-корректор. На этапе предиктора (предсказания) используется явная схема
(5)
а на этапе корректора (уточнения) — схема
В одношаговых методах Рунге—Кутта идеи предиктора-корректора реализуются наиболее полно. Этот метод записывается в общем виде:
(6),
Формула (6) основана на s вычислениях функции f и называется s-стадийной. Если при имеем явный метод Рунге—Кутта. Если при j>1 и то определяется неявно из уравнения:
(7)
О таком методе Рунге—Кутта говорят как о диагонально-неявном. Параметры определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
Одним из наиболее распространенных является явный метод Рунге—Кутта четвертого порядка
(8)
Метод Рунге—Кутта— Фельберга
Привожу значение расчётных коэффициентов метода
(9)
С учётом(9) общее решение имеет вид:
(10)
Это решение обеспечивает пятый порядок точности, остаётся его адаптировать к Python.
Вычислительный эксперимент по определению абсолютной погрешности численного решения нелинейного дифференциального уравнения  с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
Адаптированные к Python методы Рунге—Кутта и Рунге—Кутта— Фельберга имеют меньшую абсолютную, чем решение с применением функции odeint, но большую, чем с использованием функции edu. Необходимо провести исследование быстродействия.
Численный эксперимент по сравнению быстродействия численного решения СДУ при использовании функции ode с атрибутом dopri5 (метод Рунге – Кутты 5 порядка) и с использованием адаптированного к Python метода Рунге—Кутта— Фельберга
Сравнительный анализ проведём на примере модельной задачи, приведенной в [2]. Чтобы не повторять источник, приведу постановку и решение модельной задачи из [2].
Решим задачу Коши, описывающую движение тела, брошенного с начальной скоростью v0 под углом α к горизонту в предположении, что сопротивление воздуха пропорционально квадрату скорости. В векторной форме уравнение движения имеет вид
где – радиус вектор движущегося тела, – вектор скорости тела, – коэффициент сопротивления, вектор силы веса тела массы m, g – ускорение свободного падения.
Особенность этой задачи состоит в том, что движение заканчивается в заранее неизвестный момент времени, когда тело падает на землю. Если обозначить , то в координатной форме мы имеем систему уравнений:
К системе следует добавить начальные условия: (h начальная высота), . Положим . Тогда соответствующая система ОДУ 1 – го порядка примет вид:
Для модельной задачи положим . Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
Flight time = 1.2316 Distance = 5.9829 Height =1.8542
Flight time = 1.1016 Distance = 4.3830 Height =1.5088
Flight time = 1.0197 Distance = 3.5265 Height =1.2912
Flight time = 0.9068 Distance = 2.5842 Height =1.0240
Время на модельную задачу: 0.454787
Для реализации средствами Python численного решения СДУ без использования специальных модулей, мною была предложена и исследована следующая функция:
def increment(f, t, y, tau
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
Функция increment(f, t, y, tau) обеспечивает пятый порядок численного метода решения. Остальные особенности программы можно посмотреть в следующем листинге:
Время на модельную задачу: 0.259927
Предложенная программная реализация модельной задачи без использования специальных модулей имеет почти в двое большее быстродействие, чем с функцией ode, однако нельзя забывать, что ode имеет более высокую точность численного решения и возможности выбора метода решения.
Решение краевой задачи с поточно разделёнными краевыми условиями
Приведем пример некоторой конкретной краевой задачи с поточно разделенными краевыми условиями:
(11)
Для решения задачи (11) используем следующий алгоритм:
1. Решаем первые три неоднородные уравнения системы (11) с начальными условиями
Введем обозначение для решения задачи Коши:
2. Решаем первые три однородные уравнения системы (11) с начальными условиями
Введем обозначение для решения задачи Коши:
3. Решаем первые три однородные уравнения системы (11) с начальными условиями
Введем обозначение для решения задачи Коши:
4. Общее решение краевой задачи (11) при помощи решений задач Коши записывается в виде линейной комбинации решений:
где p2, p3 — некоторые неизвестные параметры.
5. Для определения параметров p2, p3, используем краевые условия последних двух уравнений (11), то есть условия при x = b. Подставляя, получим систему линейных уравнений относительно неизвестных p2, p3:
(12)
Решая (12), получим соотношения для p2, p3.
По приведенному алгоритму с применением метода Рунге—Кутта—Фельберга получим следующую программу:
y0[0]= 0.0
y1[0]= 1.0
y2[0]= 0.7156448588231397
y3[0]= 1.324566562303714
y0[N-1]= 0.9900000000000007
y1[N-1]= 0.1747719838716767
y2[N-1]= 0.8
y3[N-1]= 0.5000000000000001
Время на модельную задачу: 0.070878
Вывод
Разработанная мною программа отличается от приведенной в [3] меньшей погрешностью, что подтверждает приведенный в начале статьи сравнительный анализ функции odeint с реализованным на Python метода Рунге—Кутта—Фельберга.
3. Н.М. Полякова, Е.В. Ширяева Python 3. Создание графического интерфейса пользователя (на примере решения методом пристрелки краевой задачи для линейных обыкновенных дифференциальных уравнений). Ростов-на-Дону 2017.
Численные методы решения нелинейных уравнений
Если законы функционирования модели нелинейны, а моделируемые процесс или система обладают одной степенью свободы (т.е. имеют одну независимую переменную), то такая модель, как правило, описывается одним нелинейным уравнением.
Необходимость отыскания корней нелинейных уравнений встречается в расчетах систем автоматического управления и регулирования, собственных колебаний машин и конструкций, в задачах кинематического анализа и синтеза, плоских и пространственных механизмов и других задачах.
Дано нелинейное уравнение:
 | ( 4.1) |
Необходимо решить это уравнение, т. е. найти его корень  .
.

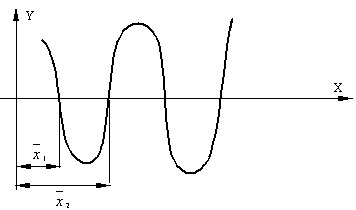
Если функция имеет вид многочлена степени m,

где ai — коэффициенты многочлена,  , то уравнение f(x)=0 имеет m корней (рис. 4.2).
, то уравнение f(x)=0 имеет m корней (рис. 4.2).
Если функция f(x) включает в себя тригонометрические или экспоненциальные функции от некоторого аргумента x , то уравнение (4.1) называется трансцендентным уравнением .


Такие уравнения обычно имеют бесконечное множество решений.
Как известно, не всякое уравнение может быть решено точно. В первую очередь это относится к большинству трансцендентных уравнений .
Доказано также, что нельзя построить формулу, по которой можно было бы решать произвольные алгебраические уравнения степени, выше четвертой.
Однако точное решение уравнения не всегда является необходимым. Задачу отыскания корней уравнения можно считать практически решенной, если мы сумеем найти корни уравнения с заданной степенью точности . Для этого используются приближенные (численные) методы решения.
Большинство употребляющихся приближенных методов решения уравнений являются, по существу, способами уточнения корней. Для их применения необходимо знание интервала изоляции [a,b] , в котором лежит уточняемый корень уравнения (рис. 4.3).
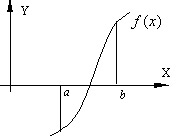
Процесс определения интервала изоляции [a,b] , содержащего только один из корней уравнения, называется отделением этого корня.
Процесс отделения корней проводят исходя из физического смысла прикладной задачи, графически, с помощью таблиц значений функции f(x) или при помощи специальной программы отделения корней. Процедура отделения корней основана на известном свойстве непрерывных функций: если функция непрерывна на замкнутом интервале [a,b] и на его концах имеет различные знаки, т.е. f(a)f(b) , то между точками a и b имеется хотя бы один корень уравнения (1). Если при этом знак функции f'(x) на отрезке [a,b] не меняется, то корень является единственным на этом отрезке.
Процесс определения корней алгебраических и трансцендентных уравнений состоит из 2 этапов:
- отделение корней, — т.е. определение интервалов изоляции [a,b] , внутри которого лежит каждый корень уравнения;
- уточнение корней, — т.е. сужение интервала [a,b] до величины равной заданной степени точности .
 .
.Для алгебраических и трансцендентных уравнений пригодны одни и те же методы уточнения приближенных значений действительных корней:
Численные методы: решение нелинейных уравнений

Задачи решения уравнений постоянно возникают на практике, например, в экономике, развивая бизнес, вы хотите узнать, когда прибыль достигнет определенного значения, в медицине при исследовании действия лекарственных препаратов, важно знать, когда концентрация вещества достигнет заданного уровня и т.д.
В задачах оптимизации часто необходимо определять точки, в которых производная функции обращается в 0, что является необходимым условием локального экстремума.
В статистике при построении оценок методом наименьших квадратов или методом максимального правдоподобия также приходится решать нелинейные уравнения и системы уравнений.
Итак, возникает целый класс задач, связанных с нахождением решений нелинейных уравнений, например, уравнения  или уравнения
или уравнения  и т.д.
и т.д.
В простейшем случае у нас имеется функция  , заданная на отрезке ( a , b ) и принимающая определенные значения.
, заданная на отрезке ( a , b ) и принимающая определенные значения.
Каждому значению x из этого отрезка мы можем сопоставить число  , это и есть функциональная зависимость, ключевое понятие математики.
, это и есть функциональная зависимость, ключевое понятие математики.
Нам нужно найти такое значение  при котором
при котором  такие
такие  называются корнями функции
называются корнями функции 
Визуально нам нужно определить точку пересечения графика функции  с осью абсцисс.
с осью абсцисс.
Метод деления пополам
Простейшим методом нахождения корней уравнения  является метод деления пополам или дихотомия.
является метод деления пополам или дихотомия.
Этот метод является интуитивно ясным и каждый действовал бы при решении задачи подобным образом.
Алгоритм состоит в следующем.
Предположим, мы нашли две точки  и
и  , такие что
, такие что  и
и  имеют разные знаки, тогда между этими точками находится хотя бы один корень функции
имеют разные знаки, тогда между этими точками находится хотя бы один корень функции  .
.
Поделим отрезок  пополам и введем среднюю точку
пополам и введем среднюю точку  .
.
Тогда либо  , либо
, либо  .
.
Оставим ту половину отрезка, для которой значения на концах имеют разные знаки. Теперь этот отрезок снова делим пополам и оставляем ту его часть, на границах которой функция имеет разные знаки, и так далее, достижения требуемой точности.
Очевидно, постепенно мы сузим область, где находится корень функции, а, следовательно, с определенной степенью точности определим его.
Заметьте, описанный алгоритм применим для любой непрерывной функции.
К достоинствам метода деления пополам следует отнести его высокую надежность и простоту.
Недостатком метода является тот факт, что прежде чем начать его применение, необходимо найти две точки, значения функции в которых имеют разные знаки. Очевидно, что метод неприменим для корней четной кратности и также не может быть обобщен на случай комплексных корней и на системы уравнений.
Порядок сходимости метода линейный, на каждом шаге точность возрастает вдвое, чем больше сделано итераций, тем точнее определен корень.
Метод Ньютона: теоретические основы
Классический метод Ньютона или касательных заключается в том, что если  — некоторое приближение к корню
— некоторое приближение к корню  уравнения
уравнения  , то следующее приближение определяется как корень касательной к функции
, то следующее приближение определяется как корень касательной к функции  , проведенной в точке
, проведенной в точке  .
.
Уравнение касательной к функции  в точке
в точке  имеет вид:
имеет вид:

В уравнении касательной положим  и
и  .
.
Тогда алгоритм последовательных вычислений в методе Ньютона состоит в следующем:

Сходимость метода касательных квадратичная, порядок сходимости равен 2.
Таким образом, сходимость метода касательных Ньютона очень быстрая.
Запомните этот замечательный факт!
Без всяких изменений метод обобщается на комплексный случай.
Если корень  является корнем второй кратности и выше, то порядок сходимости падает и становится линейным.
является корнем второй кратности и выше, то порядок сходимости падает и становится линейным.
Упражнение 1. Найти с помощью метода касательных решение уравнения  на отрезке (0, 2).
на отрезке (0, 2).
Упражнение 2. Найти с помощью метода касательных решение уравнения  на отрезке (1, 3).
на отрезке (1, 3).
К недостаткам метода Ньютона следует отнести его локальность, поскольку он гарантированно сходится при произвольном стартовом приближении только, если везде выполнено условие  , в противной ситуации сходимость есть лишь в некоторой окрестности корня.
, в противной ситуации сходимость есть лишь в некоторой окрестности корня.
Недостатком метода Ньютона является необходимость вычисления производных на каждом шаге.
Визуализация метода Ньютона
Метод Ньютона (метод касательных) применяется в том случае, если уравнение f(x) = 0 имеет корень  , и выполняются условия:
, и выполняются условия:
1) функция y= f(x) определена и непрерывна при  ;
;
2) f(a)·f(b) 0. Таким образом, выбирается точка с абсциссой x0, в которой касательная к кривой y=f(x) на отрезке [a;b] пересекает ось Ox. За точку x0 сначала удобно выбирать один из концов отрезка.
Рассмотрим метод Ньютона на конкретном примере.
Пусть нам дана возрастающая функция y = f(x) =x 2 -2, непрерывная на отрезке (0;2), и имеющая f ‘(x) = 2x > 0 и f »(x) = 2 > 0.

Уравнение касательной в общем виде имеет представление:
В нашем случае: y-y0=2x0·(x-x0). В качестве точки x0 выбираем точку B1(b; f(b)) = (2,2). Проводим касательную к функции y = f(x) в точке B1, и обозначаем точку пересечения касательной и оси Ox точкой x1. Получаем уравнение первой касательной:y-2=2·2(x-2), y=4x-6.
Точка пересечения касательной и оси Ox: x1 = 

Рисунок 2. Результат первой итерации
Затем находим точку пересечения функции y=f(x) и перпендикуляра, проведенного к оси Ox через точку x1, получаем точку В2 =(1.5; 0.25). Снова проводим касательную к функции y = f(x) в точке В2, и обозначаем точку пересечения касательной и оси Ox точкой x2.
Точка пересечения касательной и оси Ox: x2 =  .
.

Рисунок 3. Вторая итерация метода Ньютона
Затем находим точку пересечения функции y=f(x) и перпендикуляра, проведенного к оси Ox через точку x2, получаем точку В3 и так далее.
В3 = ( )
)

Рисунок 4. Третий шаг метода касательных
Первое приближение корня определяется по формуле:
 = 1.5.
= 1.5.
Второе приближение корня определяется по формуле:
 =
= 
Третье приближение корня определяется по формуле:


Таким образом, i-ое приближение корня определяется по формуле:

Вычисления ведутся до тех пор, пока не будет достигнуто совпадение десятичных знаков, которые необходимы в ответе, или заданной точности e — до выполнения неравенства |xi—xi-1|
using namespace std;
float f(double x) //возвращает значение функции f(x) = x^2-2
float df(float x) //возвращает значение производной
float d2f(float x) // значение второй производной
int _tmain(int argc, _TCHAR* argv[])
int exit = 0, i=0;//переменные для выхода и цикла
double x0,xn;// вычисляемые приближения для корня
double a, b, eps;// границы отрезка и необходимая точность
cin>>a>>b; // вводим границы отрезка, на котором будем искать корень
cin>>eps; // вводим нужную точность вычислений
if (a > b) // если пользователь перепутал границы отрезка, меняем их местами
if (f(a)*f(b)>0) // если знаки функции на краях отрезка одинаковые, то здесь нет корня
cout 0) x0 = a; // для выбора начальной точки проверяем f(x0)*d2f(x0)>0 ?
xn = x0-f(x0)/df(x0); // считаем первое приближение
cout eps) // пока не достигнем необходимой точности, будет продолжать вычислять
xn = x0-f(x0)/df(x0); // непосредственно формула Ньютона
> while (exit!=1); // пока пользователь не ввел exit = 1
Посмотрим, как это работает. Нажмем на зеленый треугольник в верхнем левом углу экрана, или же клавишу F5.
Если происходит ошибка компиляции «Ошибка error LNK1123: сбой при преобразовании в COFF: файл недопустим или поврежден», то это лечится либо установкой первого Service pack 1, либо в настройках проекта Свойства -> Компоновщик отключаем инкрементную компоновку.

Рис. 4. Решение ошибки компиляции проекта
Мы будем искать корни у функции f(x) = x2-2.
Сначала проверим работу приложения на «неправильных» входных данных. На отрезке [3; 5] нет корней, наша программа должна выдать сообщение об ошибке.
У нас появилось окно приложения:

Рис. 5. Ввод входных данных
Введем границы отрезка 3 и 5, и точность 0.05. Программа, как и надо, выдала сообщение об ошибке, что на данном отрезке корней нет.

Рис. 6. Ошибка «На этом отрезке корней нет!»
Выходить мы пока не собираемся, так что на сообщение «Exit?» вводим «0».
Теперь проверим работу приложения на корректных входных данных. Введем отрезок [0; 2] и точность 0.0001.

Рис. 7. Вычисление корня с необходимой точностью
Как мы видим, необходимая точность была достигнута уже на 4-ой итерации.
Чтобы выйти из приложения, введем «Exit?» => 1.
Метод секущих
Чтобы избежать вычисления производной, метод Ньютона можно упростить, заменив производную на приближенное значение, вычисленное по двум предыдущим точкам:
 /
/
Итерационный процесс имеет вид:

где  .
.
Это двухшаговый итерационный процесс, поскольку использует для нахождения последующего приближения два предыдущих.
Порядок сходимости метода секущих ниже, чем у метода касательных и равен в случае однократного корня  .
.
Эта замечательная величина называется золотым сечением:

Убедимся в этом, считая для удобства, что  .
.


Таким образом, с точностью до бесконечно малых более высокого порядка

Отбрасывая остаточный член, получаем рекуррентное соотношение, решение которого естественно искать в виде  .
.
После подстановки имеем:  и
и 
Для сходимости необходимо, чтобы  было положительным, поэтому
было положительным, поэтому  .
.
Поскольку знание производной не требуется, то при том же объёме вычислений в методе секущих (несмотря на меньший порядок сходимости) можно добиться большей точности, чем в методе касательных.
Отметим, что вблизи корня приходится делить на малое число, и это приводит к потере точности (особенно в случае кратных корней), поэтому, выбрав относительно малое  , выполняют вычисления до выполнения
, выполняют вычисления до выполнения  и продолжают их пока модуль разности соседних приближений убывает.
и продолжают их пока модуль разности соседних приближений убывает.
Как только начнется рост, вычисления прекращают и последнюю итерацию не используют.
Такая процедура определения момента окончания итераций называется приемом Гарвика.
Метод парабол
Рассмотрим трехшаговый метод, в котором приближение  определяется по трем предыдущим точкам
определяется по трем предыдущим точкам  ,
,  и
и  .
.
Для этого заменим, аналогично методу секущих, функцию  интерполяционной параболой проходящей через точки
интерполяционной параболой проходящей через точки  ,
,  и
и  .
.
В форме Ньютона она имеет вид:

Точка  определяется как тот из корней этого полинома, который ближе по модулю к точке
определяется как тот из корней этого полинома, который ближе по модулю к точке  .
.
Порядок сходимости метода парабол выше, чем у метода секущих, но ниже, чем у метода Ньютона.
Важным отличием от ранее рассмотренных методов, является то обстоятельство, что даже если  вещественна при вещественных
вещественна при вещественных  и стартовые приближения выбраны вещественными, метод парабол может привести к комплексному корню исходной задачи.
и стартовые приближения выбраны вещественными, метод парабол может привести к комплексному корню исходной задачи.
Этот метод очень удобен для поиска корней многочленов высокой степени.
Метод простых итераций
Задачу нахождения решений уравнений можно формулировать как задачу нахождения корней:  , или как задачу нахождения неподвижной точки
, или как задачу нахождения неподвижной точки .
.
Пусть  и
и  — сжатие:
— сжатие:  (в частности, тот факт, что
(в частности, тот факт, что  — сжатие, как легко видеть, означает, что
— сжатие, как легко видеть, означает, что ).
).
По теореме Банаха существует и единственна неподвижная точка 
Она может быть найдена как предел простой итерационной процедуры

где начальное приближение  — произвольная точка промежутка
— произвольная точка промежутка  .
.
Если функция  дифференцируема, то удобным критерием сжатия является число
дифференцируема, то удобным критерием сжатия является число  . Действительно, по теореме Лагранжа
. Действительно, по теореме Лагранжа

Таким образом, если производная меньше единицы, то  является сжатием.
является сжатием.
Условие  существенно, ибо если, например,
существенно, ибо если, например,  на [0,1] , то неподвижная точка отсутствует, хотя производная равна нулю. Скорость сходимости зависит от величины
на [0,1] , то неподвижная точка отсутствует, хотя производная равна нулю. Скорость сходимости зависит от величины  . Чем меньше
. Чем меньше  , тем быстрее сходимость.
, тем быстрее сходимость.
Рассмотрим уравнение:  .
.
Если в качестве  взять функцию
взять функцию  , то соответствующая итерационная процедура будет иметь вид:
, то соответствующая итерационная процедура будет иметь вид:  . Как нетрудно убедиться, метод итераций в данном случае расходится при любой начальной точке
. Как нетрудно убедиться, метод итераций в данном случае расходится при любой начальной точке  , не совпадающей с собственно неподвижной точкой
, не совпадающей с собственно неподвижной точкой  .
.
Однако можно в качестве  можно взять, например, функцию
можно взять, например, функцию  . Соответствующая итерационная процедура имеет вид:
. Соответствующая итерационная процедура имеет вид:  .
.
Эти итерации сходятся к неподвижной точке для любого начального приближения  :
:

Действительно, в первом случае  , т.е. для выполнения условия
, т.е. для выполнения условия  необходимо чтобы
необходимо чтобы  , но тогда
, но тогда  . Таким образом, отображение
. Таким образом, отображение  сжатием не является.
сжатием не является.
Рассмотрим  , неподвижная точка та же самая, ситуация другая. Здесь, хотя формально производная может быть довольно большой (при малых ж), однако уже на следующем шаге она будет меньше 1.
, неподвижная точка та же самая, ситуация другая. Здесь, хотя формально производная может быть довольно большой (при малых ж), однако уже на следующем шаге она будет меньше 1.


т.е. такой итерационный процесс всегда сходится.
Метод Ньютона представляет собой частный случай метода простых итераций.
Здесь  нетрудно убедиться, что при
нетрудно убедиться, что при  существует окрестность корня, в которой
существует окрестность корня, в которой  .
.

то если  корень кратности
корень кратности  , то в его окрестности
, то в его окрестности  и, следовательно,
и, следовательно, .
.
Если  — простой корень, то сходимость метода касательных квадратичная (то есть порядок сходимости равен 2).
— простой корень, то сходимость метода касательных квадратичная (то есть порядок сходимости равен 2).
Поскольку  , то
, то



Таким образом, сходимость метода Ньютона очень быстрая.
Нахождение всех корней уравнения
Недостатком почти всех итерационных методов нахождения корней является то, что они при однократном применении позволяют найти лишь один корень функции, к тому же, мы не знаем какой именно.
Чтобы найти другие корни, можно было бы брать новые стартовые точки и применять метод вновь, но нет гарантии, что при этом итерации сойдутся к новому корню, а не к уже найденному, если вообще сойдутся.
Для поиска других корней используется метод удаления корней.
Пусть  — корень функции
— корень функции  , рассмотрим функцию
, рассмотрим функцию . Точка
. Точка  будет являться корнем функции
будет являться корнем функции  на единицу меньшей кратности, чем
на единицу меньшей кратности, чем , при этом все остальные корни у функций
, при этом все остальные корни у функций  и
и  совпадают с учетом кратности.
совпадают с учетом кратности.
Применяя тот или иной метод нахождения корней к функции  , мы найдем новый корень
, мы найдем новый корень  (который может в случае кратных корней и совпадать с
(который может в случае кратных корней и совпадать с  ). Далее можно рассмотреть функцию
). Далее можно рассмотреть функцию  и искать корни у неё.
и искать корни у неё.
Повторяя указанную процедуру, можно найти все корни  с учетом кратности.
с учетом кратности.
Заметим, что когда мы производим деление на тот или иной корень  , то в действительности мы делим лишь на найденное приближение
, то в действительности мы делим лишь на найденное приближение  , и, тем самым, несколько сдвигаем корни вспомогательной функции относительно истинных корней функции
, и, тем самым, несколько сдвигаем корни вспомогательной функции относительно истинных корней функции  . Это может привести к значительным погрешностям, если процедура отделения применялась уже достаточное число раз.
. Это может привести к значительным погрешностям, если процедура отделения применялась уже достаточное число раз.
Чтобы избежать этого, с помощью вспомогательных функций вычисляются лишь первые итерации, а окончательные проводятся по исходной функции  , используя в качестве стартового приближения, последнюю итерацию, полученную по вспомогательной функции.
, используя в качестве стартового приближения, последнюю итерацию, полученную по вспомогательной функции.
Мы рассмотрели решение уравнений только в одномерном случае, нахождение решений многомерных уравнений существенно более трудная задача.
http://intuit.ru/studies/courses/2260/156/lecture/27239
http://statistica.ru/branches-maths/chislennye-metody-resheniya-uravneniy/