Численное решение математических моделей объектов заданных системами дифференциальных уравнений
Введение:
При математическом моделировании ряда технических устройств используются системы дифференциальных нелинейных уравнений. Такие модели используются не только в технике, они находят применение в экономике, химии, биологии, медицине, управлении.
Исследование функционирования таких устройств требуют решения указанных систем уравнений. Поскольку основная часть таких уравнений являются нелинейными и нестационарными, часто невозможно получить их аналитическое решение.
Возникает необходимость использовать численные методы, наиболее известным из которых является метод Рунге — Кутты [1]. Что касается Python, то в публикациях по численным методам, например [2,3], данных по применение Рунге — Кутты крайне мало, а по его модификации — методу Рунге-Кутта-Фельберга вообще нет.
В настоящее время, благодаря простому интерфейсу, наибольшее распространение в Python имеет функцию odeint из модуля scipy.integrate. Вторая функция ode из этого модуля реализует несколько методов, в том числе и упомянутый пятиранговый метод Рунге-Кутта-Фельберга, но, вследствие универсальности, имеет ограниченное быстродействие.
Целью настоящей публикации является сравнительный анализ перечисленных средств численного решения систем дифференциальных уравнений с модифицированным автором под Python методом Рунге-Кутта-Фельберга. В публикации так же приведены решения по краевым задачам для систем дифференциальных уравнений (СДУ).
Краткие теоретические и фактические данные по рассматриваемым методам и программным средствам для численного решения СДУ
Для одного дифференциального уравнения n – го порядка, задача Коши состоит в нахождении функции, удовлетворяющей равенству:

и начальным условиям

Перед решением эта задача должна быть переписана в виде следующей СДУ
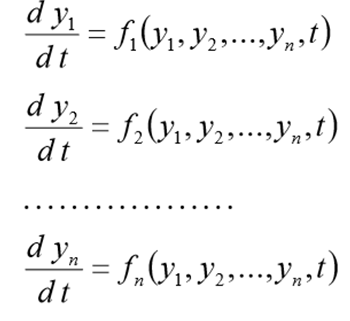 (1)
(1)
с начальными условиями

Модуль имеет две функции ode() и odeint(), предназначенные для решения систем обыкновенных дифференциальных уравнений (ОДУ) первого порядка с начальными условиями в одной точке (задача Коши). Функция ode() более универсальная, а функция odeint() (ODE integrator) имеет более простой интерфейс и хорошо решает большинство задач.
Функция odeint() имеет три обязательных аргумента и много опций. Она имеет следующий формат odeint(func, y0, t[,args=(), . ]) Аргумент func – это имя Python функции двух переменных, первой из которых является список y=[y1,y2. yn], а второй – имя независимой переменной.
Функция func должна возвращать список из n значений функций  при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
Второй аргумент y0 функции odeint() является массивом (или списком) начальных значений  при t=t0.
при t=t0.
Третий аргумент является массивом моментов времени, в которые вы хотите получить решение задачи. При этом первый элемент этого массива рассматривается как t0.
Функция odeint() возвращает массив размера len(t) x len(y0). Функция odeint() имеет много опций, управляющих ее работой. Опции rtol (относительная погрешность) и atol (абсолютная погрешность) определяют погрешность вычислений ei для каждого значения yi по формуле

Они могут быть векторами или скалярами. По умолчанию

Вторая функция модуля scipy.integrate, которая предназначена для решения дифференциальных уравнений и систем, называется ode(). Она создает объект ОДУ (тип scipy.integrate._ode.ode). Имея ссылку на такой объект, для решения дифференциальных уравнений следует использовать его методы. Аналогично функции odeint(), функция ode(func) предполагает приведение задачи к системе дифференциальных уравнений вида (1) и использовании ее функции правых частей.
Отличие только в том, что функция правых частей func(t,y) первым аргументом принимает независимую переменную, а вторым – список значений искомых функций. Например, следующая последовательность инструкций создает объект ODE, представляющий задачу Коши.
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
При численном решении задачи Коши
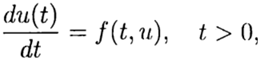 (2)
(2)
 (3)
(3)
по известному решению в точке t =0 необходимо найти из уравнения (3) решение при других t. При численном решении задачи (2),(3) будем использовать равномерную, для простоты, сетку по переменной t с шагом т > 0.
Приближенное решение задачи (2), (3) в точке  обозначим
обозначим  . Метод сходится в точке
. Метод сходится в точке  если
если  при
при  . Метод имеет р-й порядок точности, если
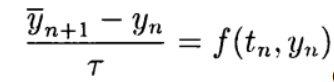
. Метод имеет р-й порядок точности, если  , р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
, р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
 (4)
(4)
При  имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема
имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема  в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
Явные схемы второго и более высокого порядка аппроксимации удобно строить, ориентируясь на метод предиктор-корректор. На этапе предиктора (предсказания) используется явная схема
 (5)
(5)
а на этапе корректора (уточнения) — схема

В одношаговых методах Рунге—Кутта идеи предиктора-корректора реализуются наиболее полно. Этот метод записывается в общем виде:
 (6),
(6),

Формула (6) основана на s вычислениях функции f и называется s-стадийной. Если  при
при  имеем явный метод Рунге—Кутта. Если при j>1 и
имеем явный метод Рунге—Кутта. Если при j>1 и  то
то  определяется неявно из уравнения:
определяется неявно из уравнения:
 (7)
(7)
О таком методе Рунге—Кутта говорят как о диагонально-неявном. Параметры  определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
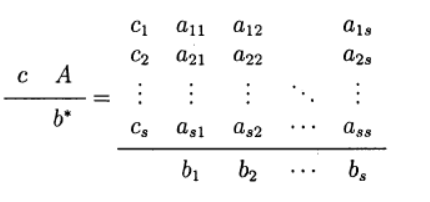
Одним из наиболее распространенных является явный метод Рунге—Кутта четвертого порядка
 (8)
(8)
Метод Рунге—Кутта— Фельберга
Привожу значение расчётных коэффициентов метода
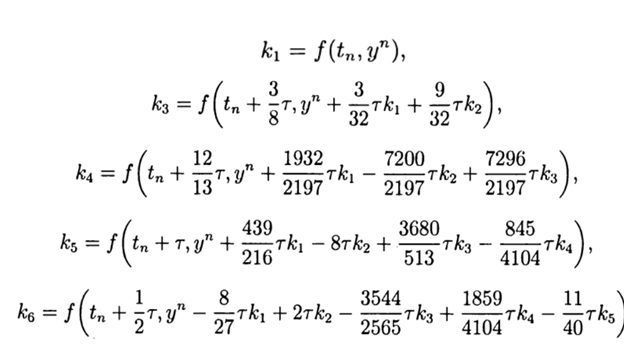 (9)
(9)
С учётом(9) общее решение имеет вид:
 (10)
(10)
Это решение обеспечивает пятый порядок точности, остаётся его адаптировать к Python.
Вычислительный эксперимент по определению абсолютной погрешности численного решения нелинейного дифференциального уравнения  с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
 с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга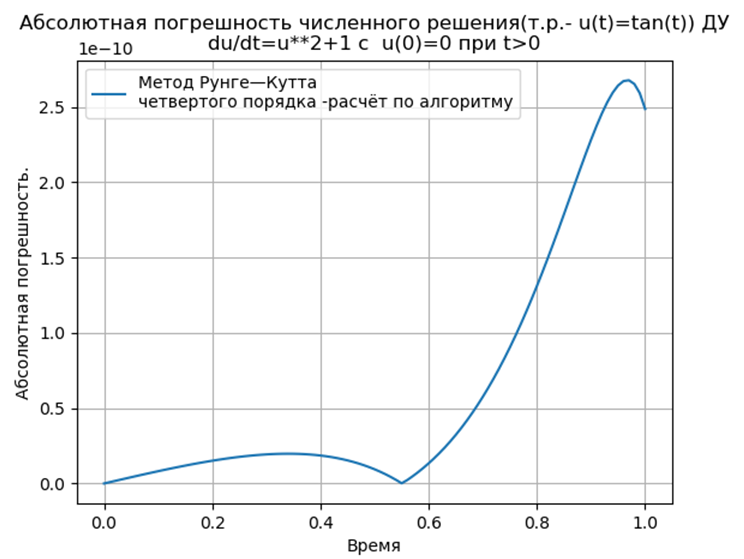


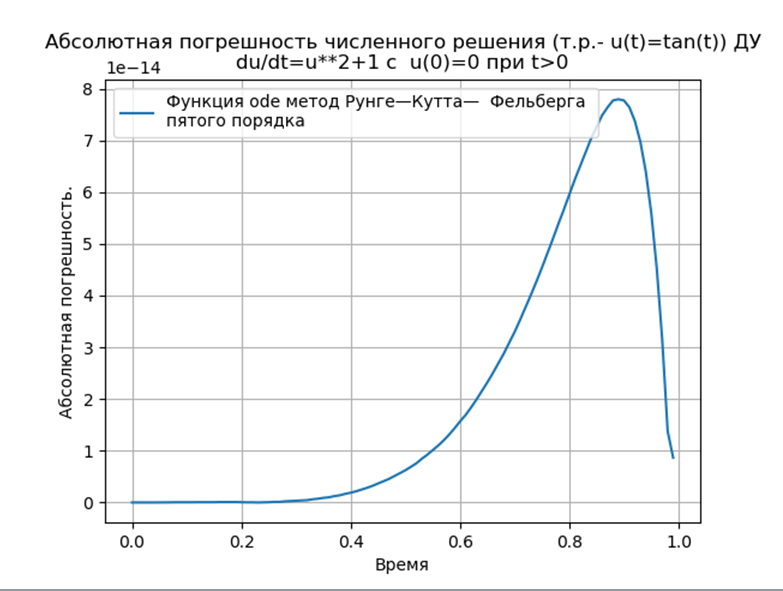
Адаптированные к Python методы Рунге—Кутта и Рунге—Кутта— Фельберга имеют меньшую абсолютную, чем решение с применением функции odeint, но большую, чем с использованием функции edu. Необходимо провести исследование быстродействия.
Численный эксперимент по сравнению быстродействия численного решения СДУ при использовании функции ode с атрибутом dopri5 (метод Рунге – Кутты 5 порядка) и с использованием адаптированного к Python метода Рунге—Кутта— Фельберга
Сравнительный анализ проведём на примере модельной задачи, приведенной в [2]. Чтобы не повторять источник, приведу постановку и решение модельной задачи из [2].
Решим задачу Коши, описывающую движение тела, брошенного с начальной скоростью v0 под углом α к горизонту в предположении, что сопротивление воздуха пропорционально квадрату скорости. В векторной форме уравнение движения имеет вид

где  – радиус вектор движущегося тела,
– радиус вектор движущегося тела,  – вектор скорости тела,
– вектор скорости тела,  – коэффициент сопротивления, вектор
– коэффициент сопротивления, вектор  силы веса тела массы m, g – ускорение свободного падения.
силы веса тела массы m, g – ускорение свободного падения.
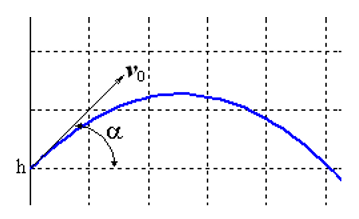
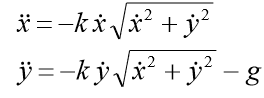
Особенность этой задачи состоит в том, что движение заканчивается в заранее неизвестный момент времени, когда тело падает на землю. Если обозначить  , то в координатной форме мы имеем систему уравнений:
, то в координатной форме мы имеем систему уравнений:
К системе следует добавить начальные условия:  (h начальная высота),
(h начальная высота),  . Положим
. Положим  . Тогда соответствующая система ОДУ 1 – го порядка примет вид:
. Тогда соответствующая система ОДУ 1 – го порядка примет вид:

Для модельной задачи положим  . Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
. Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
Flight time = 1.2316 Distance = 5.9829 Height =1.8542
Flight time = 1.1016 Distance = 4.3830 Height =1.5088
Flight time = 1.0197 Distance = 3.5265 Height =1.2912
Flight time = 0.9068 Distance = 2.5842 Height =1.0240
Время на модельную задачу: 0.454787

Для реализации средствами Python численного решения СДУ без использования специальных модулей, мною была предложена и исследована следующая функция:
def increment(f, t, y, tau
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
Функция increment(f, t, y, tau) обеспечивает пятый порядок численного метода решения. Остальные особенности программы можно посмотреть в следующем листинге:
Время на модельную задачу: 0.259927

Предложенная программная реализация модельной задачи без использования специальных модулей имеет почти в двое большее быстродействие, чем с функцией ode, однако нельзя забывать, что ode имеет более высокую точность численного решения и возможности выбора метода решения.
Решение краевой задачи с поточно разделёнными краевыми условиями
Приведем пример некоторой конкретной краевой задачи с поточно разделенными краевыми условиями:
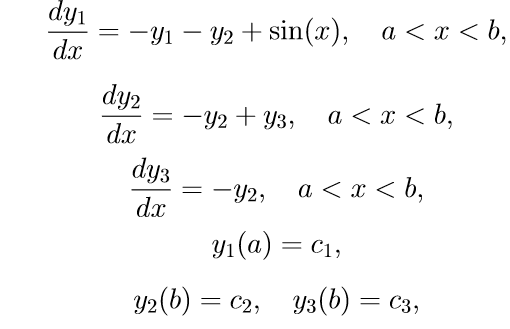 (11)
(11)
Для решения задачи (11) используем следующий алгоритм:
1. Решаем первые три неоднородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
2. Решаем первые три однородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
3. Решаем первые три однородные уравнения системы (11) с начальными условиями

Введем обозначение для решения задачи Коши:

4. Общее решение краевой задачи (11) при помощи решений задач Коши записывается в виде линейной комбинации решений: 
где p2, p3 — некоторые неизвестные параметры.
5. Для определения параметров p2, p3, используем краевые условия последних двух уравнений (11), то есть условия при x = b. Подставляя, получим систему линейных уравнений относительно неизвестных p2, p3:
 (12)
(12)
Решая (12), получим соотношения для p2, p3.
По приведенному алгоритму с применением метода Рунге—Кутта—Фельберга получим следующую программу:
y0[0]= 0.0
y1[0]= 1.0
y2[0]= 0.7156448588231397
y3[0]= 1.324566562303714
y0[N-1]= 0.9900000000000007
y1[N-1]= 0.1747719838716767
y2[N-1]= 0.8
y3[N-1]= 0.5000000000000001
Время на модельную задачу: 0.070878

Вывод
Разработанная мною программа отличается от приведенной в [3] меньшей погрешностью, что подтверждает приведенный в начале статьи сравнительный анализ функции odeint с реализованным на Python метода Рунге—Кутта—Фельберга.
3. Н.М. Полякова, Е.В. Ширяева Python 3. Создание графического интерфейса пользователя (на примере решения методом пристрелки краевой задачи для линейных обыкновенных дифференциальных уравнений). Ростов-на-Дону 2017.
Компьютерное моделирование и решение линейных и нелинейных многомерных систем
При моделировании экономических задач, таких как задачи управления и планирования производства, определения оптимального размещения оборудования, оптимального плана производства, оптимального плана перевозок грузов ( транспортная задача), распределения кадров и др., может быть положена гипотеза линейного представления реального мира.
Математические модели таких задач представляются линейными уравнениями. Если задача многомерна, то ее математическая модель представляется системой линейных уравнений .
Линейные математические модели также используются в нелинейных системах при условии, если эта нелинейная система условно линеаризирована.
В общем виде система линейных уравнений имеет вид:
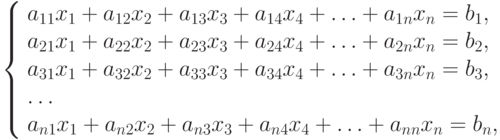
aij — коэффициенты при неизвестных системы,
bi — свободные члены ,
xj — неизвестные системы,
 — номер строки,
— номер строки,
 — номер столбца,
— номер столбца,
n — порядок системы.
В матричной форме система линейных уравнений имеет вид:



Численные методы решения систем линейных уравнений (СЛУ) можно разделить на две группы:
- точные или прямые методы,
- приближенные методы.
Приближенные методы реализуют на ЭВМ нахождение корней с заданной точностью и являются итерационными методами.
Точные методы позволяют получить решение системы за конечное число итераций. К точным методам относятся:
- правило Крамера,
- метод Гаусса ,
- метод прогонки .
Решение систем линейных уравнений методом Гаусса
Метод Гаусса является точным методом. Он позволяет получить решение системы за конечное число арифметических действий. В основе метода лежит идея последовательного исключения неизвестных. Метод состоит из двух этапов. На первом этапе (прямой ход) система при помощи последовательного исключения неизвестных приводится к треугольному виду. На втором этапе (обратный ход) из системы треугольного вида последовательно, в обратном порядке, начиная c n-го уравнения, находятся неизвестные системы.
В качестве примера возьмем систему 4 порядка.
 | ( 9.1) |
Прямой ход. На первом шаге прямого хода (к=1) находим x1 из первого уравнения системы (9.1).
 — ведущий элемент первой строки.
— ведущий элемент первой строки.
Если  , то
, то
 | ( 9.2) |
 | ( 9.3) |
Подставляя (9.3) в (9.2), получим
 | ( 9.4) |
Подставляем (9.4) во 2, 3 и 4 уравнение системы (9.1), получим:

Обозначив коэффициенты при неизвестных полученной системы через  , а свободные члены через
, а свободные члены через  перепишем полученную систему:
перепишем полученную систему:
 | ( 9.5) |

Таким образом, в результате выполнения первого шага прямого хода исходная система (9.1) n-го порядка преобразована к совокупности уравнения (9.4) и системы линейных уравнений (9.5), порядок которой равен n-1 .
На втором шаге прямого хода (к=2) из первого уравнения системы (9.5) находим x2 .
 -ведущий элемент первой строки системы (9.5).
-ведущий элемент первой строки системы (9.5).
Если  , то из первого уравнения системы (9.5) имеем:
, то из первого уравнения системы (9.5) имеем:
 | ( 9.6) |
Подставив выражение (9.6) во второе и третье уравнения системы (9.5), получим новую систему линейных уравнений , порядок которой равен n-2 .
 | ( 9.7) |
Таким образом, в результате выполнения второго шага прямого хода исходная система (9.1) преобразована к совокупности уравнений (9.4), (9.6) и системы линейных уравнений (9.7),порядок которой равен n-2 .
Основы математического моделирования систем и процессов (стр. 2 )
 | Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 |

В каждом из перечисленных случаев в различной степени сказывается влияние таких ранее не учтенных факторов, как сила сопротивления воздуха, притяжение Луны, Солнца, убывание плотности атмосферы с высотой, вращение Земли, ветер, по-разному дующий на разных высотах, фактическое отличие формы Земли от шара (она является телом более сложной геометрической формы).
Проблема 3. Определение уровня детализации исследуемого объекта.
Любая физическая система представляет собой совокупность элементов. Каждый элемент в свою очередь можно расчленить на подэлементы. Процесс расчленения теоретически может быть бесконечным. Задача исследователя – выбрать оптимальный уровень детализации моделируемого объекта. Уровень детализации определяется целью моделирования и степенью знаний о свойствах элементов объекта.
Детализацию целесообразно производить до такого уровня, на котором для каждого элемента можно определить зависимость параметров выходных сигналов от параметров входных сигналов. Стремление повысить уровень детализации приводит к чрезмерной громоздкости модели и резкому увеличению ее размерности.
3-й этап. Формирование математической модели, т. е. запись модели в формализованном виде:
– все соотношения записывают в аналитической форме;
– логические условия выражают в виде систем неравенств;
– случайные процессы заменяют их типовыми моделями.
4-й этап. Исследование математической модели. Инструментами исследования являются численные и аналитические методы.
5-й этап. Анализ результатов моделирования с последующим выводом об адекватности модели либо о необходимости ее доработки, либо о ее непригодности.
1.3.4. Классификация математических моделей
Математические модели можно классифицировать по форме их представления (рис. 1.10). За основу второй классификации (рис. 1.11) взят характер модели.

 |
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ В ФОРМЕ
СИСТЕМ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
2.1. Области применения
Исследование некоторых физических систем приводит к математическим моделям в форме систем линейных алгебраических уравнений (СЛАУ). Иногда СЛАУ появляются в процессе математического моделирования как промежуточный шаг (этап) в решении более сложной задачи. Есть значительное число научно-технических задач, в которых математические модели сложных нелинейных систем посредством дискретизации или линеаризации сводятся к решению СЛАУ.
Примеры задач, использующих математические модели в форме СЛАУ:
1) при проектировании и эксплуатации электротехнических устройств требуется проведение расчета и анализа их работы в стационарных режимах. Задача сводится к расчету эквивалентных схем, в основе которого лежит формирование и решение СЛАУ;
2) при построении математической модели, связывающей функциональной зависимостью некоторые параметры x, y исследуемого объекта на основании полученных в результате эксперимента данных  , где i = 1,2,3, . ,n (задачи аппроксимации данных);
, где i = 1,2,3, . ,n (задачи аппроксимации данных);
3) при исследовании процессов в системах, математические модели которых строятся в классе дифференциальных уравнений в частных производных. В результате разностной аппроксимации исходной модели при определенных условиях приходят к математическим соотношениям в форме СЛАУ;
4) сущность многих физических процессов математически отображается с помощью интегральных уравнений. Ввиду сложности решения многих из них исследователь предпочитает свести задачу к решению модели в форме СЛАУ, используя известные методы аппроксимации.
5) исследование систем автоматического регулирования в установившемся режиме приводит во многих случаях к статическим моделям в форме СЛАУ.
Система линейных уравнений порядка n имеет вид:

 (2.1)
(2.1)
или в векторно-матричной форме:
 (2.2)
(2.2)
где  – вектор свободных членов;
– вектор свободных членов;
 – вектор неизвестных;
– вектор неизвестных;
A – матрица коэффициентов системы, размером  .
.
2.2. Методы решения
Методы решения СЛАУ делятся на две группы: прямые (точные) и итерационные (приближенные).
Прямые методы позволяют получить решение за конечное число шагов. Итерационные методы построены по принципу многократного вычисления последовательных приближений, сходящихся к искомому решению.
Прямые методы целесообразно использовать для решения систем сравнительно небольшой размерности с плотно заполненной матрицей (матрицей, имеющей малое количество нулевых элементов). Итерационные методы предпочтительнее в задачах большой размерности со слабо заполненными матрицами.
К прямым методам относятся метод определителей, метод Гаусса и его модификации, метод LU-разложения, матричный метод и др. К разряду итерационных методов принадлежат метод простой итерации, метод Зейделя.
2.2.1. Прямые методы
2.2.1.1. Метод Гаусса
Решение СЛАУ осуществляется в два этапа (прямой и обратный ход)
Прямой ход. Исходная система (2.1) путем последовательных преобразований приводится к треугольному виду. Это достигается последовательным исключением неизвестных  из уравнений. В результате получается эквивалентная система:
из уравнений. В результате получается эквивалентная система:

 (2.3)
(2.3)
Обратный ход. С помощью подстановки  в предпоследнее (n-1)-е уравнение системы (2.3) вычисляется
в предпоследнее (n-1)-е уравнение системы (2.3) вычисляется  . Подстановкой
. Подстановкой  и
и  в (n-2)-е уравнение определяют
в (n-2)-е уравнение определяют  . Таким же образом последовательно определяют неизвестные
. Таким же образом последовательно определяют неизвестные  .
.
П р и м е р 14. Решить систему с тремя неизвестными методом Гаусса:

 (2.4)
(2.4)
Прямой ход. Первое уравнение из системы (2.4) разделим на 3:
 (2.5)
(2.5)
Из второго уравнения исключим неизвестное  Для этого ко второму уравнению прибавим преобразованное первое уравнение, умноженное на (–2). Получим:
Для этого ко второму уравнению прибавим преобразованное первое уравнение, умноженное на (–2). Получим:
 (2.6)
(2.6)
 (2.7)
(2.7)
Разделим уравнение (2.7) на  . Получим:
. Получим:
 . (2.8)
. (2.8)
Из третьего уравнения системы (2.4) исключим  . Для этого из третьего уравнения вычтем первое преобразованное (2.5):
. Для этого из третьего уравнения вычтем первое преобразованное (2.5):
 (2.9)
(2.9)
 (2.10)
(2.10)
Разделим уравнение (2.10) на  :
:
 , (2.11)
, (2.11)

 (2.12)
(2.12)
Из третьего уравнения системы (2.12) исключим неизвестное  . Для этого к третьему уравнению прибавим второе:
. Для этого к третьему уравнению прибавим второе:
 (2.13)
(2.13)
или  , (2.14)
, (2.14)
откуда выразим  :
:  .
.
Тогда эквивалентная система в треугольном виде примет вид:

 (2.15)
(2.15)
Обратный ход. Подставим значение  во второе уравнение системы (2.15) и найдем
во второе уравнение системы (2.15) и найдем  . Подстановкой значений
. Подстановкой значений  и
и  в первое уравнение найдем
в первое уравнение найдем  .
.
Если квадратная матрица  линейной системы
линейной системы
 (2.16)
(2.16)
имеет отличные от нуля главные диагональные миноры, т. е.
 (2.17)
(2.17)
то она может быть разложена на произведение двух треугольных матриц – нижней  с ненулевыми диагональными элементами и верхней –
с ненулевыми диагональными элементами и верхней –  с единичными диагональными элементами
с единичными диагональными элементами
 (2.18)
(2.18)
Поэтому матричное уравнение (2.16) можно заменить уравнением:
 (2.19)
(2.19)
Введем вектор вспомогательных переменных  Тогда уравнение (2.19) можно записать в виде системы двух векторно-матричных уравнений:
Тогда уравнение (2.19) можно записать в виде системы двух векторно-матричных уравнений:
 (2.20)
(2.20)
Таким образом, решение системы (2.16) сводится к последовательному решению двух систем с треугольными матрицами типа (2.3) или (2.15), из которых неизвестные определяются последовательной подстановкой.
Математически это выражается так: из первого уравнения системы (2.20) определяется вектор  :
:
 , (2.21)
, (2.21)
после чего из второго уравнения системы (2.19) вычисляется вектор  :
:
 . (2.22)
. (2.22)
Обратные матрицы  и
и  существуют, т. к. определители треугольных матриц L и U, вычисляемые как произведения их диагональных элементов, отличны от нуля.
существуют, т. к. определители треугольных матриц L и U, вычисляемые как произведения их диагональных элементов, отличны от нуля.
Метод LU-разложения – это фактически метод Гаусса, выраженный в векторно-матричной форме, отличающийся от классического варианта способом хранения матриц.
2.2.1.3. Матричный метод
Если для системы  выполняется условие невырожденности матрицы A
выполняется условие невырожденности матрицы A
 , (2.23)
, (2.23)
то решение этой системы можно представить в виде:
 , (2.24)
, (2.24)
где  – обратная матрица.
– обратная матрица.
2.2.2. Итерационные методы
2.2.2.1. Метод простых итераций
Исходная система уравнений (2.1) приводится к виду:

 (2.25)
(2.25)

 (2.26)
(2.26)
Задав начальные (нулевые) приближения для искомых неизвестных:
 (2.27)
(2.27)
подставляем их в правую часть системы (2.26). Получаемые при этом в левой части системы значения  представляют собой первые приближения:
представляют собой первые приближения:
 , (2.28)
, (2.28)
где 
Подставив первые приближения  в правую часть системы (2.26), в левой ее части получим вторые приближения −
в правую часть системы (2.26), в левой ее части получим вторые приближения −  :
:
 . (2.29)
. (2.29)
Таким образом, итерационный процесс описывается соотношениями:

 (2.30)
(2.30)
Полученные в результате последовательности итераций приближения:  сходятся к истинному решению системы (2.1), в том случае, если для коэффициентов системы (2.26) выполняется хотя бы одно из условий:
сходятся к истинному решению системы (2.1), в том случае, если для коэффициентов системы (2.26) выполняется хотя бы одно из условий:
 ; (2.31)
; (2.31)
 . (2.32)
. (2.32)
Вычисления продолжают до тех пор, пока не будет выполнено условие:
 (2.33)
(2.33)
где  – заданная точность.
– заданная точность.
2.2.2.2. Метод Зейделя
Метод Зейделя – модификация метода простых итераций, обеспечивающая ускорение сходимости итерационного процесса к истинному решению системы за счет следующего приема.
Уточненное значение  , полученное из первого уравнения системы (2.26) вводится во второе уравнение системы и используется для вычисления
, полученное из первого уравнения системы (2.26) вводится во второе уравнение системы и используется для вычисления  . Затем уточненные значения
. Затем уточненные значения  ,
,  вводятся в третье уравнение системы (2.26) и используются для вычисления
вводятся в третье уравнение системы (2.26) и используются для вычисления  . Таким образом, k-е приближение
. Таким образом, k-е приближение  будет определяться через уточненные в процессе k-й итерации значения
будет определяться через уточненные в процессе k-й итерации значения  . Следовательно, итерационный процесс, реализуемый в методе Зейделя, может быть выражен соотношениями:
. Следовательно, итерационный процесс, реализуемый в методе Зейделя, может быть выражен соотношениями:

 (2.34)
(2.34)
3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ В ФОРМЕ НЕЛИНЕЙНЫХ
АЛГЕБРАИЧЕСКИХ И ТРАНСЦЕНДЕНТНЫХ УРАВНЕНИЙ
3.1. Пример формирования модели
 П р и м е р 15. Моделируемый объект – нелинейная цепь постоянного тока (рис. 3.1). R2 – нелинейное сопротивление.
П р и м е р 15. Моделируемый объект – нелинейная цепь постоянного тока (рис. 3.1). R2 – нелинейное сопротивление.
По закону Кирхгофа
 (3.1)
(3.1)
Нелинейную вольт-амперную характеристику (ВАХ) элемента R2 аппроксимируем выражением:
 (3.2)
(3.2)
Сделаем подстановку выражения (3.2) в уравнение (3.1):
 (3.3)
(3.3)
 (3.4)
(3.4)
 f(i)
f(i)
Соотношение f(i) = 0 представляет собой математическую модель электрической цепи в форме нелинейного алгебраического уравнения относительно тока i. Решение этой модели позволит определить ток i в цепи при заданных значениях U и R1.
Исследование объектов различной физической природы в установившемся режиме часто приводит к статическим моделям в форме нелинейных алгебраических уравнений.
Алгебраическое уравнение  может содержать только алгебраические функции, в которых над переменной x производятся арифметические операции, возведение в степень с рациональным показателем и извлечение корня. Например:
может содержать только алгебраические функции, в которых над переменной x производятся арифметические операции, возведение в степень с рациональным показателем и извлечение корня. Например:
 (3.5)
(3.5)
 (3.6)
(3.6)
В некоторых задачах моделирование приводит к трансцендентному уравнению.
Трансцендентным называется уравнение, в состав которого входят трансцендентные функции: показательная, логарифмическая, тригонометрические функции, возведение в иррациональную степень. Например:
 (3.7)
(3.7)
 (3.8)
(3.8)
3.2. Базовые понятия
Уравнение с одним неизвестным x в общем случае имеет вид:
где z(x) и g(x) — функции, определенные на некотором числовом множестве X, называемом областью допустимых значений уравнения.
Другая форма записи уравнения с одним неизвестным имеет вид:
где f(x) = z(x) – g(x) получается в результате переноса функции g(x) в левую часть уравнения (3.9).
Всякое значение x*, которое при подстановке в уравнение (3.10) обращает его в числовое равенство, а функцию f(x) — в ноль, т. е. такое, что
 , (3.11)
, (3.11)
называется корнем уравнения, или нулем функции f(x).
Решить уравнение – значит найти все его корни (решения) или доказать, что уравнение не имеет корней.
Для алгебраических уравнений число корней известно заранее. Каждое алгебраическое уравнение степени n имеет в множестве комплексных чисел n корней с учетом кратности.
3.3. Методы решения
Аналитическое (явное) решение, т. е. решение в виде готовой формулы, выражающей неизвестное x через параметры уравнения, можно получить только для ограниченного круга уравнений, например формулы для вычисления корней квадратного (аx2+bx+c=0) и кубического (x3+px+q=0) уравнений. Решение некоторых простейших трансцендентных уравнений может быть получено в аналитической форме с использованием степенных рядов, непрерывных дробей и т. д.
В большинстве случаев найти явное решение уравнения очень сложно или невозможно. Кроме того, использование аналитических формул для решения большинства уравнений не может обеспечить получение точного значения корня, поскольку коэффициенты уравнения являются приближенными величинами, определенными в результате измерений. Поэтому задача отыскания точного значения корня теряет смысл.
Ставится задача – определить приближенное значение корня уравнения с заданной точностью.
Приближенное решение математических задач лежит в основе численных методов.
3.3.1. Особенности численных методов решения
3.3.1.1. Этапы численного решения нелинейного уравнения
Численное решение уравнения f(x) = 0 (речь идет о действительных корнях) проводят в два этапа:
1) отделение корней, т. е. отыскание таких достаточно малых отрезков в области допустимых значений x, в которых содержится только один корень;
2) уточнение корней, т. е. вычисление корней с заданной точностью.
 3.3.1.2. Отделение корней
3.3.1.2. Отделение корней
Рассмотрим несколько способов отделения корней.
С п о с о б 1 – по графику функции y = f(x).
приближенно определяется как абсцисса точки пересечения графика с осью Оx (рис. 3.2). Устанавливаются границы a и b отрезка, в пределах которого заключен только один корень x*.
С п о с о б 2 – уравнение f(x) = 0 заменяют равносильным:
 . (3.13)
. (3.13)
Строят графики функций  и
и 
Приближенное значение корня определяют как абсциссу точки пересечения этих графиков.
Например: отделим корень уравнения
 (3.14)
(3.14)
 для области значений аргумента x > 0.
для области значений аргумента x > 0.
Преобразуем уравнение (3.14) к виду:
 (3.15)
(3.15)
где 
Строим графики (рис. 3.3) и находим приближенно x* и отрезок  .
.
С п о с о б 3 – по таблице значений функции f(x) на интересующем интервале изменения аргумента x. Например, представим таблицу (табл.3.1) значений функции
 . (3.16)
. (3.16)
Из данных табл. 3.1 видно, что корень уравнения существует и его следует искать на отрезке [7,0; 10,0], так как значения функции на концах этого отрезка имеют разные знаки.
Таблица значений функции
С п о с о б 4 – аналитический метод отделения корней, который базируется на знании следующих свойств функции:
а) если функция  непрерывна на отрезке
непрерывна на отрезке  и принимает на концах этого отрезка значения разных знаков, то внутри отрезка
и принимает на концах этого отрезка значения разных знаков, то внутри отрезка  существует по крайней мере один корень уравнения
существует по крайней мере один корень уравнения  ;
;
б) если функция  непрерывна и монотонна на отрезке
непрерывна и монотонна на отрезке  и принимает на концах отрезка значения разных знаков, а производная
и принимает на концах отрезка значения разных знаков, а производная  сохраняет постоянный знак внутри отрезка, то внутри этого отрезка существует корень уравнения
сохраняет постоянный знак внутри отрезка, то внутри этого отрезка существует корень уравнения  и притом единственный.
и притом единственный.
Функция  называется монотонной в заданном интервале, если при любых
называется монотонной в заданном интервале, если при любых  из этого интервала она удовлетворяет условию
из этого интервала она удовлетворяет условию  (монотонно возрастающая функция)
(монотонно возрастающая функция)
или  (монотонно убывающая функция).
(монотонно убывающая функция).
Необходимым и достаточным условием монотонности функции в заданном интервале является выполнение для всех внутренних точек этого интервала условия  или
или 
Зная свойства функции , можно сделать вывод о характере графика  , что может существенно облегчить процесс отыскания корней. Продемонстрируем это для непрерывной и монотонной на отрезке функции
, что может существенно облегчить процесс отыскания корней. Продемонстрируем это для непрерывной и монотонной на отрезке функции  , которая принимает на концах отрезка значения разных знаков, имеет во всех точках интервала первую и вторую производные
, которая принимает на концах отрезка значения разных знаков, имеет во всех точках интервала первую и вторую производные  и
и  , сохраняющие постоянный знак (рис. 3.4).
, сохраняющие постоянный знак (рис. 3.4).
3.3.1.3. Уточнение корней
Рассмотрим несколько численных методов уточнения корней, применяемых для решения как алгебраических, так и трансцендентных уравнений. Эти методы относятся к разряду итерационных.
Итерационный процесс состоит в последовательном шаг за шагом уточнении начального приближения x0 искомого корня. Каждый шаг такого метода называется итерацией.
 |
В результате реализации итерационного метода получают последовательность приближенных значений корня  Если эти значения с увеличением n приближаются к истинному значению корня x*, то говорят, что итерационный процесс сходится.
Если эти значения с увеличением n приближаются к истинному значению корня x*, то говорят, что итерационный процесс сходится.
3.3.1.3.1. Метод половинного деления (дихотомии, бисекции)
Пусть дано уравнение
 (3.17)
(3.17)
где функция  непрерывна и монотонна на отрезке и имеет на концах отрезка разные знаки:
непрерывна и монотонна на отрезке и имеет на концах отрезка разные знаки:
 (3.18)
(3.18)
 Требуется найти корень
Требуется найти корень  уравнения (3.17) с точностью до
уравнения (3.17) с точностью до  График функции представлен на рис. 3.5.
График функции представлен на рис. 3.5.
Рассмотрим суть и этапы реализации метода половинного деления.
1) Отрезок  делим пополам и определяем середину отрезка:
делим пополам и определяем середину отрезка:
 (3.19)
(3.19)
2) Вычисляем значение функции в точке  Если
Если  , то
, то  является корнем уравнения. Если
является корнем уравнения. Если  то поиск корня продолжается на одном из двух полученных отрезков –
то поиск корня продолжается на одном из двух полученных отрезков –  или
или  . Следует выбрать тот отрезок, на концах которого функция принимает значения противоположных знаков. В данном случае (см. рис. 3.5) выбираем отрезок
. Следует выбрать тот отрезок, на концах которого функция принимает значения противоположных знаков. В данном случае (см. рис. 3.5) выбираем отрезок  , так как для него выполняется условие:
, так как для него выполняется условие:  Для того чтобы сохранить в дальнейших расчетах единое обозначение
Для того чтобы сохранить в дальнейших расчетах единое обозначение  текущего отрезка, на котором ведется поиск корня на данном шаге вычислений, необходимо параметру b присвоить новое значение
текущего отрезка, на котором ведется поиск корня на данном шаге вычислений, необходимо параметру b присвоить новое значение  : b =
: b =  . С точки зрения геометрической интерпретации (см. рис. 3.5) это означает, что правая граница исходного отрезка точка b переносится в точку а оставшаяся за пределами точки часть графика дальше не рассматривается.
. С точки зрения геометрической интерпретации (см. рис. 3.5) это означает, что правая граница исходного отрезка точка b переносится в точку а оставшаяся за пределами точки часть графика дальше не рассматривается.
http://intuit.ru/studies/courses/2260/156/lecture/27249
http://pandia.ru/text/78/121/88311-2.php