ЛЕКЦИЯ 4
Модели, описываемые системами двух автономных дифференциальных уравнений.
Фазовая плоскость. Фазовый портрет. Метод изоклин. Главные изоклины. Устойчивость стационарного состояния. Линейные системы. Типы особых точек: узел, седло, фокус, центр. Пример: химические реакции первого порядка.
Наиболее интересные результаты по качественному моделированию свойств биологических систем получены на моделях из двух дифференциальных уравнений, которые допускают качественное исследование с помощью метода фазовой плоскости. Рассмотрим систему двух автономных обыкновенных дифференциальных уравнений общего вида
 (4.1)
(4.1)
P(x,y), Q(x,y) — непрерывные функции, определенные в некоторой области G евклидовой плоскости ( x,y ‑ декартовы координаты) и имеющие в этой области непрерывные производные порядка не ниже первого.
Область G может быть как неограниченной, так и ограниченной. Если переменные x, y имеют конкретный биологический смысл (концентрации веществ, численности видов) чаще всего область G представляет собой положительный квадрант правой полуплоскости:
Концентрации веществ или численности видов также могут быть ограничены сверху объемом сосуда или площадью ареала обитания. Тогда область значений переменных имеет вид:
Переменные x, y во времени изменяются в соответствии с системой уравнений (4.1), так что каждому состоянию системы соответствует пара значений переменных ( x, y) .
Изображающая точка на фазовой плоскости
 |
Обратно, каждой паре переменных ( x, y) соответствует определенное состояние системы.
Рассмотрим плоскость с осями координат, на которых отложены значения переменных x,y. Каждая точка М этой плоскости соответствует определенному состоянию системы. Такая плоскость носит название фазовой плоскости и изображает совокупность всех состояний системы. Точка М(x,y) называется изображающей или представляющей точкой.
Пусть в начальный момент времени t=t0 координаты изображающей точки М0( x( t0) , y( t0)) . В каждый следующий момент времени t изображающая точка будет смещаться в соответствии с изменениями значений переменных x( t) , y( t) . Совокупность точек М( x( t) , y(t)) на фазовой плоскости, положение которых соответствует состояниям системы в процессе изменения во времени переменных x(t), y(t) согласно уравнениям (4.1), называется фазовой траекторией.
Совокупность фазовых траекторий при различных начальных значениях переменных дает легко обозримый «портрет» системы. Построение фазового портрета позволяет сделать выводы о характере изменений переменных x, y без знания аналитических решений исходной системы уравнений (4.1).
Для изображения фазового портрета необходимо построить векторное поле направлений траекторий системы в каждой точке фазовой плоскости. Задавая приращение D t>0, получим соответствующие приращения D x и D y из выражений:
Направление вектора dy/dx в точке ( x, y) зависит от знака функций P(x, y), Q(x, y) и может быть задано таблицей:
Задача построения векторного поля упрощается, если получить выражение для фазовых траекторий в аналитическом виде. Для этого разделим второе из уравнений системы (4.1) на первое:
 . (4.2)
. (4.2)
Решение этого уравнения y = y( x, c) , или в неявном виде F( x,y) =c, где с – постоянная интегрирования, дает семейство интегральных кривых уравнения (4.2) ‑ фазовых траекторий системы (4.1) на плоскости x, y.
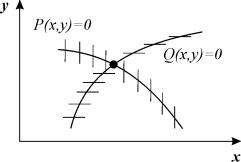
Для построения фазового портрета пользуются методом изоклин – на фазовой плоскости наносят линии, которые пересекают интегральные кривые под одним определенным углом. Уравнение изоклин легко получить из (4.2). Положим

где А – определенная постоянная величина. Значение А представляет собой тангенс угла наклона касательной к фазовой траектории и может принимать значения от – ¥ до + ¥ . Подставляя вместо dy/dx в (4.2) величину А получим уравнение изоклин:
 . (4.3)
. (4.3)
Уравнение (4.3) определяет в каждой точке плоскости единственную касательную к соответствующей интегральной кривой за исключением точки, где P (x,y) = 0, Q ( x,y) = 0, в которой направление касательной становится неопределенным, так как при этом становится неопределенным значение производной:
 .
.
Эта точка является точкой пересечения всех изоклин – особой точкой. В ней одновременно обращаются в нуль производные по времени переменных x и y.

Таким образом, в особой точке скорости изменения переменных равны нулю. Следовательно, особая точка дифференциальных уравнений фазовых траекторий (4.2) соответствует стационарному состоянию системы (4.1), а ее координаты – суть стационарные значения переменных x, y.
Особый интерес представляют главные изоклины:
dy/dx=0, P ( x,y) =0 – изоклина горизонтальных касательных и
dy/dx= ¥ , Q ( x,y) =0 – изоклина вертикальных касательных.
Построив главные изоклины и найдя точку их пересечения (x,y), координаты которой удовлетворяют условиям:

мы найдем тем самым точку пересечения всех изоклин фазовой плоскости, в которой направление касательных к фазовым траекториям неопределенно. Это – особая точка, которая соответствует стационарному состоянию системы (рис. 4.2).
Система (4.1) обладает столькими стационарными состояниями, сколько точек пересечения главных изоклин имеется на фазовой плоскости.
Каждая фазовая траектория соответствует совокупности движений динамической системы, проходящих через одни и те же состояния и отличающихся друг от друга только началом отсчета времени.
Рис. 4.2. Пересечение главных изоклин на фазовой плоскости.
 |
Таким образом, фазовые траектории системы – это проекции интегральных кривых в пространстве всех трех измерений x, y, t на плоскость x, y (рис.4.3).
Рис. 4.3. Траектории системы в пространстве ( x, y, t).
 |
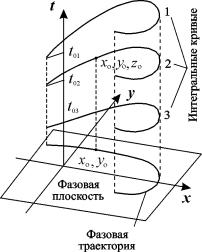
Если условия теоремы Коши выполнены, то через каждую точку пространства x, y, t проходит единственная интегральная кривая. То же справедливо, благодаря автономности, для фазовых траекторий: через каждую точку фазовой плоскости проходит единственная фазовая траектория.
Устойчивость стационарного состояния
Пусть система находится в состоянии равновесия.
Тогда изображающая точка находится в одной из особых точек системы, в которых по определению:
 .
.
Устойчива или нет особая точка, определяется тем, уйдет или нет изображающая точка при малом отклонении от стационарного состояния. Применительно к системе из двух уравнений определение устойчивости на языке e , d выглядит следующим образом.
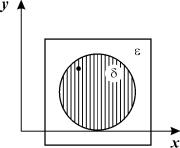
Состояние равновесия устойчиво, если для любой заданной области отклонений от состояния равновесия ( e ) можно указать область d ( e ) , окружающую состояние равновесия и обладающую тем свойством, что ни одна траектория, которая начинается внутри области d , никогда не достигнет границы e . (рис. 4.4)
Иллюстрация к определению устойчивости области e и d на плоскости ( x,y)
 |
Для большого класса систем – грубых систем – характер поведения которых не меняется при малом изменении вида уравнений, информацию о типе поведения в окрестности стационарного состояния можно получить, исследуя не исходную, а упрощенную линеаризованную систему.
Рассмотрим систему двух линейных уравнений:
 . (4.4)
. (4.4)
Здесь a, b, c, d — константы, x, y ‑ декартовы координаты на фазовой плоскости.
Общее решение будем искать в виде:
 . (4.5)
. (4.5)
Подставим эти выражения в (4.4) и сократим на e l t :

 (4.6)
(4.6)
Алгебраическая система уравнений (4.6) с неизвестными A, B имеет ненулевое решение лишь в том случае, если ее определитель, составленный из коэффициентов при неизвестных, равен нулю:
 .
.
Раскрывая этот определитель, получим характеристическое уравнение системы:
 . (4.7)
. (4.7)
Решение этого уравнения дает значения показателя l 1,2 , при которых возможны ненулевые для A и B решения уравнения (4.6). Эти значения суть
 . (4.8)
. (4.8)
Если подкоренное выражение отрицательно, то l 1,2 комплексно сопряженные числа. Предположим, что оба корня уравнения (4.7) имеют отличные от нуля действительные части и что нет кратных корней. Тогда общее решение системы (4.4) можно представить в виде линейной комбинации экспонент с показателями l 1 , l 2 :
 (4.9)
(4.9)
Для анализа характера возможных траекторий системы на фазовой плоскости используем линейное однородное преобразование координат, которое позволит привести систему к каноническому виду:
 , (4.10)
, (4.10)
допускающее более удобное представление на фазовой плоскости по сравнению с исходной системой (4.4). Введем новые координаты ξ , η по формулам:
 (4.1)
(4.1)
Из курса линейной алгебры известно, что в случае неравенства нулю действительных частей l 1 , l 2 исходную систему (4.4) при помощи преобразований (4.11) всегда можно преобразовать к каноническому виду (4.10) и изучать ее поведение на фазовой плоскости ξ , η . Рассмотрим различные случаи, которые могут здесь представиться.
Корни λ 1 , λ 2 – действительны и одного знака
В этом случае коэффициенты преобразования действительны, мы переходим от действительной плоскости x,y к действительной плоскости ξ, η. Разделив второе из уравнений (4.10) на первое, получим :
 . (4.12)
. (4.12)
Интегрируя это уравнение, находим :
 , где
, где  . (4.13)
. (4.13)
Условимся понимать под λ 2 корень характеристического уравнения с большим модулем, что не нарушает общности нашего рассуждения. Тогда, поскольку в рассматриваемом случае корни λ 1 , λ 2 – действительны и одного знака, a >1 , и мы имеем дело с интегральными кривыми параболического типа.
Все интегральные кривые (кроме оси η, которой соответствует  ) касаются в начале координат оси ξ, которая также является интегральной кривой уравнения (4.11). Начало координат является особой точкой.
) касаются в начале координат оси ξ, которая также является интегральной кривой уравнения (4.11). Начало координат является особой точкой.
Выясним теперь направление движений изображающей точки вдоль фазовых траекторий. Если λ 1 , λ 2 – отрицательны, то, как видно из уравнений (4.10), |ξ|, |η| убывают с течением времени. Изображающая точка приближается к началу координат, никогда, однако, не достигая его. В противном случае это противоречило бы теореме Коши, которая утверждает, что через каждую точку фазовой плоскости проходит лишь одна фазовая траектория.
Такая особая точка, через которую проходят интегральные кривые, подобно тому, как семейство парабол  проходит через начало координат, носит название узла (рис. 4.5)
проходит через начало координат, носит название узла (рис. 4.5)
Рис. 4.5. Особая точка типа узел на плоскости канонических координат ξ, η
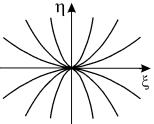
Состояние равновесия типа узел при λ 1 , λ 2 0 устойчиво по Ляпунову, так как изображающая точка по всем интегральным кривым движется по направлению к началу координат. Это устойчивый узел. Если же λ 1 , λ 2 > 0, то |ξ|, |η| возрастают с течением времени и изображающая точка удаляется от начала координат. В этом случае особая точка – неустойчивый узел .
На фазовой плоскости x, y общий качественный характер поведения интегральных кривых сохранится, но касательные к интегральным кривым не будут совпадать с осями координат. Угол наклона этих касательных будет определяться соотношением коэффициентов α , β , γ , δ в уравнениях (4.11).
Корни λ 1 , λ 2 – действительны и разных знаков.
Преобразование от координат x,y к координатам ξ, η опять действительное. Уравнения для канонических переменных снова имеют вид (4.10), но теперь знаки λ 1 , λ 2 различны. Уравнение фазовых траекторий имеет вид :
 где
где  , (4.14)
, (4.14)
Интегрируя (4.14), находим
 (4.15)
(4.15)
Это уравнение определяет семейство кривых гиперболического типа, где обе оси координат – асимптоты (при a=1 мы имели бы семейство равнобочных гипербол) . Оси координат и в этом случае являются интегральными кривыми – это будут единственные интегральные кривые, проходящие через начало координат. Каждая из них состоит из трех фазовых траекторий : из двух движений к состоянию равновесия (или от состояния равновесия) и из состояния равновесия. Все остальные интегральные кривые – суть гиперболы, не проходящие через начало координат (рис. 4.6) Такая особая точка носит название «седло ». Линии уровня вблизи горной седловины ведут себя подобно фазовым траекториям в окрестности седла.
Рис. 4.6. Особая точка типа седло на плоскости канонических координат ξ , η
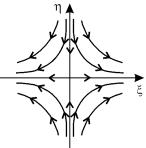
Рассмотрим характер движения изображающей точки по фазовым траекториям вблизи состояния равновесия. Пусть, например, λ 1 >0 , λ 2 . Тогда изображающая точка, помещенная на оси ξ, будет удаляться от начала координат, а помещенная на оси η – будет неограниченно приближаться к началу координат , не достигая его за конечное время . Где бы ни находилась изображающая точка в начальный момент (за исключением особой точки и точек на асимптоте η =0), она в конечном счете будет удаляться от состояния равновесия, даже если в начале она движется по одной из интегральных кривых по направлению к особой точке .
Очевидно, что особая точка типа седла всегда неустойчива . Только при специально выбранных начальных условиях на асимптоте η =0 система будет приближаться к состоянию равновесия. Однако это не противоречит утверждению о неустойчивости системы. Если считать , что все начальные состояния системы на фазовой плоскости равновероятны, то вероятность такого начального состояния, которое соответствует движению по направлению к особой точке, равна нулю. Поэтому всякое реальное движение будет удалять систему от состояния равновесия. Переходя обратно к координатам x,y, мы получим ту же качественную картину характера движения траекторий вокруг начала координат.
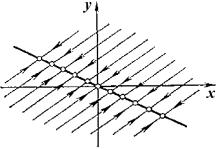
Пограничным между рассмотренными случаями узла и седла является случай, когда один из характеристических показателей, например λ 1 , обращается в нуль, что имеет место, когда определитель системы – выражение ad-bc=0 (см. формулу 4.8 ). В этом случае коэффициенты правых частей уравнений (4.4) пропорциональны друг другу :

и система имеет своими состояниями равновесия все точки прямой :

Остальные интегральные кривые представляют собой семейство параллельных прямых с угловым коэффициентом  , по которым изображающие точки либо приближаются к состоянию равновесия, либо удаляются от него в зависимости от знака второго корня характеристического уравнения λ 2 = a+d. (Рис.4. 7 ) В этом случае координаты состояния равновесия зависят от начального значения переменных.
, по которым изображающие точки либо приближаются к состоянию равновесия, либо удаляются от него в зависимости от знака второго корня характеристического уравнения λ 2 = a+d. (Рис.4. 7 ) В этом случае координаты состояния равновесия зависят от начального значения переменных.
Рис. 4.7. Фазовый портрет системы, один из характеристических корней которой равен нулю, а второй отрицателен.
В этом случае при действительных x и y мы будем иметь комплексные сопряженные ξ , η ( 4.10) . Однако , вводя еще одно промежуточное преобразование, можно и в этом случае свести рассмотрение к действительному линейному однородному преобразованию. Положим :
 (4.16)
(4.16)
где a,b, и u,v – действительные величины. Можно показать, что преобразование от x,y к u,v является при наших предположениях действительным, линейным, однородным с детерминантом, отличным от нуля. В силу уравнений (4.10, 4.16) имеем :
 (4.17)
(4.17)
Разделив второе из уравнений на первое , получим :
которое легче интегрируется , если перейти к полярной системе координат ( r, φ ) . После подстановки  получим
получим  , откуда :
, откуда :
 . (4.18)
. (4.18)
Таким образом, на фазовой плоскости u, v мы имеем дело с семейством логарифмических спиралей, каждая из которых имеет асимптотическую точку в начале координат. Особая точка, которая является асимптотической точкой всех интегральных кривых, имеющих вид спиралей , вложенных друг в друга, называется фокусом ( рис.4.8 ) .
Рис. 4.8. Фазовый портрет системы в окрестности особой точки типа фокус на плоскости координат u, v .
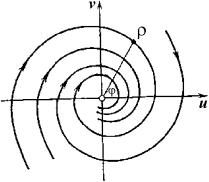
Рассмотрим характер движения изображающей точки по фазовым траекториям. Умножая первое из уравнений (4.17) на u , а второе на v и складывая , получаем :
 где
где 
Пусть a 1 0 ( a 1 = Re λ ) . Изображающая точка тогда непрерывно приближается к началу координат, не достигая его в конечное время. Это означает, что фазовые траектории представляют собой скручивающиеся спирали и соответствуют затухающим колебаниям переменных. Это – устойчивый фокус .
В случае устойчивого фокуса, как и в случае устойчивого узла, выполнено не только условие Ляпунова, но и более жесткое требование. Именно, при любых начальных отклонениях система по прошествии времени вернется как угодно близко к положению равновесия. Такая устойчивость, при которой начальные отклонения не только не нарастают, но затухают, стремясь к нулю, называют абсолютной устойчивостью .
Если в формуле (4.18) a1 >0 , то изображающая точка удаляется от начала координат, и мы имеем дело с неустойчивым фокусом . При переходе от плоскости u,v к фазовой плоскости x , y спирали также останутся спиралями, однако будут деформированы.
Рассмотрим теперь случай, когда a 1 =0 . Фазовыми траекториями на плоскости u, v будут окружности  которым на плоскости x,y соответствуют эллипсы :
которым на плоскости x,y соответствуют эллипсы :

Таким образом, при a1 =0 через особую точку x= 0 , y=0 не проходит ни одна интегральная кривая. Такая изолированная особая точка, вблизи которой интегральные кривые представляют собой замкнутые кривые, в частности, эллипсы, вложенные друг в друга и охватывающие особую точку, называется центром.
Таким образом, возможны шесть типов состояния равновесия в зависимости от характера корней характеристического уравнения (4.7). Вид фазовых траекторий на плоскости x, y для этих шести случаев изображен на рис. 4.9.
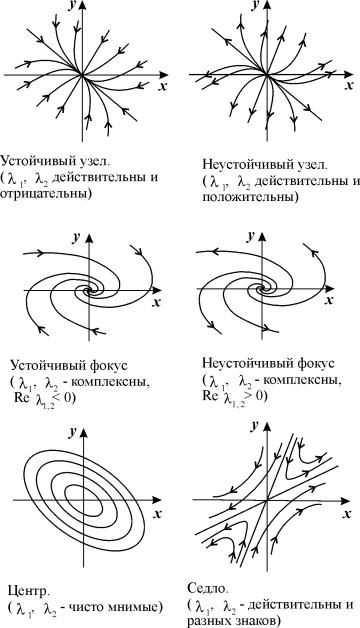
Рис. 4.9. Типы фазовых портретов в окрестности стационарного состояния для системы линейных уравнений (4.4).
Пять типов состояния равновесия грубые, их характер не изменяется при достаточно малых изменениях правых частей уравнений (4.4). При этом малыми должны быть изменения не только правых частей, но и их производных первого порядка. Шестое состояние равновесия – центр – негрубое. При малых изменениях параметров правой части уравнений он переходит в устойчивый или неустойчивый фокус.
Бифуркационная диаграмма
 . (4.11)
. (4.11)
Тогда характеристическое уравнение запишется в виде:
 . (4.12)
. (4.12)
Рассмотрим плоскость с прямоугольными декартовыми координатами s , D и отметим на ней области, соответствующие тому или иному типу состояния равновесия, который определяется характером корней характеристического уравнения
 . (4.13)
. (4.13)
Условием устойчивости состояния равновесия будет наличие отрицательной действительной части у l 1 и l 2 . Необходимое и достаточное условие этого – выполнение неравенств s > 0, D > 0 . На диаграмме (4.15) этому условию соответствуют точки, расположенные в первой четверти плоскости параметров. Особая точка будет фокусом, если l 1 и l 2 комплексны. Этому условию соответствуют те точки плоскости, для которых  , т.е. точки между двумя ветвями параболы s 2 = 4 D . Точки полуоси s = 0, D >0, соответствуют состояниям равновесия типа центр. Аналогично, l 1 и l 2 — действительны, но разных знаков, т.е. особая точка будет седлом, если D , и т.д. В итоге мы получим диаграмму разбиения плоскости параметров s , D , на области, соответствующие различным типам состояния равновесия.
, т.е. точки между двумя ветвями параболы s 2 = 4 D . Точки полуоси s = 0, D >0, соответствуют состояниям равновесия типа центр. Аналогично, l 1 и l 2 — действительны, но разных знаков, т.е. особая точка будет седлом, если D , и т.д. В итоге мы получим диаграмму разбиения плоскости параметров s , D , на области, соответствующие различным типам состояния равновесия.
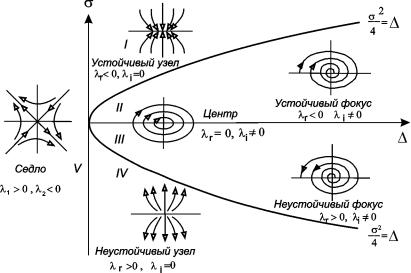
Рис. 4.10. Бифуркационная диаграмма
для системы линейных уравнений 4.4
Если коэффициенты линейной системы a, b, c, d зависят от некоторого параметра, то при изменении этого параметра будут меняться и величины s , D . При переходе через границы характер фазового портрета качественно меняется. Поэтому такие границы называются бифуркационными – по разные стороны от границы система имеет два топологически различных фазовых портрета и, соответственно два разных типа поведения.
На диаграмме видно, как могут проходить такие изменения. Если исключить особые случаи – начало координат, – то легко видеть, что седло может переходить в узел, устойчивый или неустойчивый при пересечении оси ординат. Устойчивый узел может перейти либо в седло, либо в устойчивый фокус, и т.д. Отметим, что переходы устойчивый узел – устойчивый фокус и неустойчивый узел – неустойчивый фокус не являются бифуркационными, так как топология фазового пространства при этом не меняется. Более подробно мы поговорим о топологии фазового пространства и бифуркационных переходах в лекции 6.
При бифуркационных переходах меняется характер устойчивости особой точки. Например, устойчивый фокус через центр может переходить в неустойчивый фокус. Эта бифуркация называется бифуркацией Андронова-Хопфа по именам исследовавших ее ученых. При этой бифуркации в нелинейных системах происходит рождение предельного цикла, и система становится автоколебательной (см. лекцию 8).
Пример. Система линейных химических реакций
Вещество Х притекает извне с постоянной скоростью, превращается в вещество Y и со скоростью, пропорциональной концентрации вещества Y, выводится из сферы реакции. Все реакции имеют первый порядок, за исключением притока вещества извне, имеющего нулевой порядок. Схема реакций имеет вид:
 (4.14)
(4.14)
и описывается системой уравнений:
 (4.15)
(4.15)
Стационарные концентрации получим, приравняв правые части нулю:
 . (4.16)
. (4.16)
Рассмотрим фазовый портрет системы. Разделим второе уравнение системы (4.16) на первое. Получим:
 . (4.17)
. (4.17)
Уравнение (4.17) определяет поведение переменных на фазовой плоскости. Построим фазовый портрет этой системы. Сначала нарисуем главные изоклины на фазовой плоскости. Уравнение изоклины вертикальных касательных:
Уравнение изоклины горизонтальных касательных:
Особая точка (стационарное состояние) лежит на пересечении главных изоклин.
Теперь определим, под каким углом пересекаются координатные оси интегральными кривыми.
Если x=0, то  .
.
Таким образом, тангенс угла наклона касательной к интегральным кривым y=y(x), пересекающим ось ординат x=0, отрицателен в верхней полуплоскости (вспомним, что переменные x, y имеют значения концентраций, и поэтому нас интересует только правый верхний квадрант фазовой плоскости). При этом величина тангенса угла наклона касательной увеличивается с удалением от начала координат.
Рассмотрим ось y=0 . В месте пересечения этой оси интегральными кривыми они описываются уравнением
 .
.
При  тангенс угла наклона интегральных кривых, пересекающих ось абсцисс, положителен и увеличивается от нуля до бесконечности с увеличением x.
тангенс угла наклона интегральных кривых, пересекающих ось абсцисс, положителен и увеличивается от нуля до бесконечности с увеличением x.
 при
при  .
.
Затем при дальнейшем увеличении тангенс угла наклона уменьшается по абсолютной величине, оставаясь отрицательным и стремится к -1 при x ® ¥ . Зная направление касательных к интегральным кривым на главных изоклинах и на осях координат, легко построить всю картину фазовых траекторий.
Рис. 4.12. Фазовый портрет системы линейных химических реакций (4.15)
Модели биологических систем из двух дифференциальных уравнений
Г.Ю. Ризниченко — профессор, био-фак МГУ им. М.В. Ломоносова
ЛЕКЦИЯ 1
ВВЕДЕНИЕ. МАТЕМАТИЧЕСКИЕ МОДЕЛИ В БИОЛОГИИ
Понятие модели. Объекты, цели и методы моделирования. Модели в разных науках. Компьютерные и математические модели. История первых моделей в биологии. Современная классификация моделей биологических процессов. Регрессионные, имитационные, качественные модели. Принципы имитацуионного моделирования и примеры моделей. Специфика моделирования живых систем.
Компьютеры в современном мире стали привычными для человеческой деятельности: в финансовой сфере, в бизнесе, промышленности, образовании, сфере досуга. Благодаря компьютерам западной цивилизации удалось существенно продвинуться в следующих направлениях.
- Автоматизация трудовой деятельности во всех сферах
- Информационная революция. Возможность хранить и структурировать огромные и самые разнообразные массивы информации и производить быстрый и эффективный поиск необходимой информации.
- Прогнозирование. Компьютер позволяет строить имитационные модели сложных систем, проигрывать сценарии и делать прогнозы.
- Оптимизация. Любая человеческая деятельность, в том числе обыденная жизнь требует постоянной оптимизации действий. В процессе эволюции сформировались биологические системы, которые оказываются оптимальными в том или ином смысле, например, в смысле наиболее экономичного использования энергии. Для того чтобы формализовать целевую функцию, то есть ответить на вопрос, что же является для системы оптимальным, необходимо сформулировать модель оптимизируемого процесса и критерии оптимизации. Компьютер позволяет проектировать и реализовать различные алгоритмы оптимизации.
Компьютер работает не с самой системой, а с моделью. Что же такое МОДЕЛЬ?
Наиболее простой и общий ответ на этот вопрос: модель — это копия объекта, в некотором смысле «более удобная», допускающая манипуляции в пространстве и во времени.
При моделировании, выборе и формулировке модели, определяющими обстоятельствами являются объект, цель и метод (средства) моделирования.
В нашем курсе объектами моделирования будут биологические процессы разного уровня организации.
Методами моделирования служат методы динамической теории систем. Средства — дифференциальные и разностные уравнения, методы качественной теории дифференциальных уравнений, компьютерная симуляция.
- Выяснение механизмов взаимодействия элементов системы
- Идентификация и верификация параметров модели по экспериментальным данным.
- Оценка устойчивости системы (модели). Само понятие устойчивости требует формализации.
- Прогноз поведения системы при различных внешних воздействиях, различных способах управления и проч.
- Оптимальное управление системой в соответствии с выбранным критерием оптимальности.
Примеры моделей.
1. Портрет дамы.
Пусть некто заказывает художнику написать портрет любимой женщины. Рассмотрим объект, метод (средства) и цель моделирования.
Объектом моделирования является женщина.
Метод (средства) — краски, кисти, холст. Эмаль, если портрет будет сделан на медальоне, как это было принято в прошлые века. Фотоаппарат и пленка. Рекламный щит, если некто хочет, чтобы его даму видели все, кто проезжает по оживленной магистрали. Обложка журнала, или экран телевизора. Наконец, сам художник, фотограф или рекламное агентство в лице своих дизайнеров.
Цель. При моделировании целью, как правило, является манипуляция с пространством и временем. Сохранить облик дамы во времени. Повесить портрет в гостиной, или медальон с изображением любимой — на шею, как это делали в старину. Чтобы потомки восхищались красотой дамы и своим пращуром, которому удалось запечатлеть такую красоту.
Другая цель — воспроизведение изображения (модели) объекта с целью сделать модель доступной некоторому кругу людей. Или многократно тиражировать, если некто хочет, чтобы образ дамы увидели миллионы.
2. Самолет в аэродинамической трубе. Помещая самолет в аэродинамическую трубу и испытывая его в различных воздушных потоках, мы решаем задачу взаимодействия системы с внешней средой. Это еще одна очень важная цель моделирования. При этом в корпусе самолета не обязательно должны находиться кресла, и тем более, стюардессы. Какие из свойств объекта необходимо учесть, а какие можно опустить, степень подробности воспроизведения моделью объекта, определяется теми вопросами, на которые хотят ответить с помощью модели.
3. Аквариум является примером физического моделирования. В аквариуме можно моделировать водную экосистему — речную, озерную, морскую, заселить ее некоторыми видами фито- и зоопланктона, рыбами, поддерживать определенный состав воды, температуру, даже течения. И строго контролировать условия эксперимента. Какие компоненты естественной системы будут воспроизведены, и с какой точностью, зависит от цели моделирования.
4. Выделенные из листьев хлоропласты. На выделенных системах часто изучают процессы, происходящие в живой системе, в этом смысле фрагмент является моделью целой живой системы. Выделение более простой системы позволяет исследовать механизмы процессов на молекулярном уровне. При этом исключается регуляция со стороны более высоких уровней организации, в данном случае, со стороны растительной клетки, листа, наконец, целого растения. В большинстве случаев наблюдать процессы на молекулярном уровне в нативной (ненарушенной) системе не представляется возможным. Говорят, что изученные на выделенном хлоропласте первичные процессы фотосинтеза являются моделью первичных процессов фотосинтеза в живом листе. К сожалению, этот метод фрагментирования приводит к тому, что «…живой ковер жизни распускается по ниточкам, каждая ниточка досконально изучается, но волшебный рисунок жизни оказывается утрачен» (лауреат Нобелевской премии по биохимии Л. Поллинг).
5. Бислойная липидная мембрана. Еще «более модельным» примером является изучение процессов ионного трансмембранного переноса на искусственной бислойной липидной мембране. Понятно, что в реальных биологических объектах мембраны чаще всего не бислойные, а многослойные, содержат встроенные белки и другие компоненты, поверхность их не является плоской и обладает множеством других индивидуальных особенностей. Однако, чтобы изучить законы образования поры, через которую ион проходит сквозь мембрану внутрь клетки или органеллы, необходимо создать «чистую», «модельную» систему, которую можно изучать экспериментально, и для которой можно использовать хорошо разработанное наукой физическое описание.
6. Популяция дрозофилы, является классическим объектом моделирования микроэволюционного процесса и примером исключительно удачно найденной модели. Еще более удобной моделью являются вирусы, которые можно размножать в пробирке. Хотя не вполне ясно, справедливы ли эволюционные закономерности, установленные на вирусах, для законов эволюции высших животных. В лекции 11 мы увидим, что хорошей моделью микроэволюционных процессов являются также микробные популяции в проточном культиваторе.
Из приведенных примеров видно, что любая физическая модель обладает конкретными свойствами физического объекта. В этом ее преимущества, но в этом и ее ограничения.
Компьютерные модели содержат «знания» об объекте в виде математических формул, таблиц, графиков, баз данных и знаний. Они позволяют изучать поведение системы при изменении внутренних характеристик и внешних условий, проигрывать сценарии, решать задачу оптимизации. Однако каждая компьютерная реализация соответствует конкретным, заданным параметрам системы. Наиболее общими и абстрактными являются математические модели.
Математические модели описывают целый класс процессов или явлений, которые обладают сходными свойствами, или являются изоморфными. Наука конца 20 века — синергетика, показала, что сходными уравнениями описываются процессы самоорганизации самой разной природы: от образования скоплений галактик до образования пятен планктона в океане.
Если удается сформулировать «хорошую» математическую модель, для ее исследования можно применить весь арсенал науки, накопленный за тысячелетия. Недаром многие классики независимо высказывали одну и ту же мудрую мысль:
«Область знания становится наукой, когда она выражает свои законы в виде математических соотношений»
С этой точки зрения самая «научная» наука ? физика. Она использует математику в качестве своего естественного языка. Все физические законы выражаются в виде математических формул или уравнений.
В химию математика пришла в тридцатые годы 20 века вместе с химической кинетикой и физической химией. Сейчас книги по химии, в особенности по химической кинетике, физической химии, квантовой химии полны математическими символами и уравнениями.
Чем более сложными являются объекты и процессы, которыми занимается наука, тем труднее найти математические абстракции, подходящие для описания этих объектов и процессов. В биологию, геологию и другие «описательные науки» математика пришла по настоящему только во второй половине 20 века.
Первые попытки математически описать биологические процессы относятся к моделям популяционной динамики. Эта область математической биологии и в дальнейшем служила математическим полигоном, на котором «отрабатывались» математические модели в разных областях биологии. В том числе модели эволюции, микробиологии, иммунологии и других областей, связанных с клеточными популяциями.
Самая первая известная модель, сформулированная в биологической постановке, ? знаменитый ряд Фибоначчи, который приводит в своем труде Леонардо из Пизы в 13 веке. Это ряд чисел, описывающий количество пар кроликов, которые рождаются каждый месяц, если кролики начинают размножаться со второго месяца и каждый месяц дают потомство в виде пары кроликов. Ряд представляет последовательность чисел:
Математическая биология
Курс лекций «Математические модели в биологии»
 читается автором для студентов 2-ого года обучения бакалавриата Биологического факультета МГУ имени М. В. Ломоносова. Параллельно с лекциями проходят семинары (практические занятия), в ходе которых студенты закрепляют полученные на лекциях знания и знакомятся с программным обеспечением, используемым для анализа математических моделей и проведения вычислительных экспериментов. После прохождения курса студенты сдают экзамен. Курс включает 16 лекций по 2 академических часа.
читается автором для студентов 2-ого года обучения бакалавриата Биологического факультета МГУ имени М. В. Ломоносова. Параллельно с лекциями проходят семинары (практические занятия), в ходе которых студенты закрепляют полученные на лекциях знания и знакомятся с программным обеспечением, используемым для анализа математических моделей и проведения вычислительных экспериментов. После прохождения курса студенты сдают экзамен. Курс включает 16 лекций по 2 академических часа.
- Учебник Ризниченко Г. Ю.Лекции по математическим моделям в биологии (изд. 2-е, испр. и дополн.) Издательство РХД, 2011 г. 560 стр. ISBN 978-5-93972-847-8. Предыдущее издание (значительно более краткое!) находится в свободном доступе в сети Интернет по ссылке http://www.library.biophys.msu.ru/LectMB/
- Учебник Мятлев В.Д., Панченко Л.А., Ризниченко Г.Ю., Терёхин А.Т. Теория вероятностей и математическая статистика. Математические модели (изд. 2-е, испр. и дополн.) М.: Издательство Юрайт, 2018. — 321 с. — (Серия : Университеты России). — ISBN 978-5-534-01698-7.
- Учебное пособие Плюснина Т.Ю., Фурсова П. В., Дьяконова А. Н., Тёрлова Л. Д., Ризниченко Г. Ю.Математические модели в биологии (Изд. 3-e доп. Учебное пособие. М.-Ижевск: НИЦ: «Регулярная и хаотическая динамика», 2021. 174 с. ISBN: 978-5-4344-0922-3) — электронная версия
Лекции будут прочитаны в дистанционном режиме по четвергам с сентября по декабрь 2021 года.
2 сентября. Лекция 1. Вводная. Одно уравнение. Устойчивость
Часть 1. Введение. Понятие модели. Объекты, цели и методы моделирования. Модели в разных науках. Компьютерные и математические модели. История первых моделей в биологии. Современная классификация моделей биологических процессов. Регрессионные, имитационные, качественные модели. Принципы имитационного моделирования и примеры моделей. Специфика моделирования живых систем.
Часть 2. Модели биологических систем, описываемые одним дифференциальным уравнением первого порядка. Модели, приводящие к одному дифференциальному уравнению. Понятие решения одного автономного дифференциального уравнения. Стационарное состояние (состояние равновесия). Устойчивость состояния равновесия. Методы оценки устойчивости.
9 сентября. Лекция 2. Модели роста популяций (1)
Непрерывные модели: экспоненциальный рост, логистический рост, модели с наименьшей критической численностью. Модель роста человечества. Модели с неперекрывающимися поколениями. Дискретное логистическое уравнение. Диаграмма и лестница Ламерея. Типы решений при разных значениях параметра: монотонные и затухающие решения, циклы, квазистохастическое поведение, вспышки численности. Матричные модели популяций. Влияние запаздывания. Вероятностные модели популяций.
16 сентября Лекция 3. Модели роста популяций (2). Модели, описываемые системами двух автономных дифференциальных уравнений
Часть 2. Модели, описываемые системами двух автономных дифференциальных уравнений. Фазовая плоскость. Фазовый портрет. Метод изоклин. Главные изоклины. Устойчивость стационарного состояния. Линейные системы. Типы особых точек: узел, седло, фокус, центр. Метод Ляпунова линеаризации систем в окрестности стационарного состояния. Метод функции Ляпунова.
23 сентября Лекция 4. Базовые модели математической биологии, представленные двумя автономными уравнениями
Примеры исследования устойчивости стационарных состояний моделей биологических систем. Химические реакции первого порядка. Уравнения Лотки. Уравнения Вольтерра.
30 сентября Лекция 5. Мультистационарные системы. Типы бифуркаций. Катастрофы
Триггер. Примеры систем с двумя устойчивыми стационарными состояниями. Силовое и параметрическое переключение триггера. Эволюция. Отбор одного из двух и нескольких равноправных видов. Конкуренция двух видов в случае неограниченного и ограниченного роста. Генетический триггер Жакоба и Моно. Бифуркации динамических систем. Типы бифуркаций. Бифуркационные диаграммы и фазопараметрические портреты. Катастрофы.
- Программа: Мультистационарные системы
- Учебник: Мультистационарные системы
- Учебник: Проблема быстрых и медленных переменных. Теорема Тихонова. Типы бифуркаций. Катастрофы
- Материалы по теории катастроф:
- Арнольд В.И.Теория катастроф // Наука и жизнь, 1989, № 10
- Арнольд В.И.Теория катастроф // Динамические системы – 5, Итоги науки и техн. Сер. Соврем. пробл. мат. Фундам. направления, 5, ВИНИТИ, М., 1986, 219–277
- Арнольд В.И.Теория катастроф. М., Наука, 1990 — 128 с.
- Просмотр лекции в YouTube
- Загрузить видео (MP4)
- Демонстрация PowerPoint с голосовым сопровождением
7 октября Лекция 6. Проблема быстрых и медленных переменных. Теорема Тихонова
Метод квазистационарных концентраций. Теорема Тихонова. Уравнение Михаэлиса-Ментен. Формула Моно. Конкуренция двух видов, питающихся одинаковым субстратом.
14 октября Лекция 7. Колебания в биологических системах
Понятие автоколебаний. Изображение поведения автоколебательной системы на фазовой плоскости. Предельные циклы. Условия существования предельных циклов. Рождение предельного цикла. Бифуркация Андронова-Хопфа. Мягкое и жесткое возбуждение колебаний. Модель Брюсселятор. Примеры автоколебательных моделей процессов в живых системах. Колебания в темновых процессах фотосинтеза. Автоколебания в модели гликолиза. Внутриклеточные колебания концентрации кальция.
21 октября Лекция 8. Динамический хаос. Модели биологических сообществ. Фракталы
Основные понятия теории динамических систем. Предельные множества. Аттракторы. Странные аттракторы. Динамический хаос. Линейный анализ устойчивости траекторий. Диссипативные системы. Устойчивость хаотических решений. Размерность странных аттракторов. Стационарные состояния и динамические режимы в сообществе из трех видов. Динамический хаос в моделях взаимодействия видов. Трофические системы с фиксированным количеством вещества. Модель системы четырех биологических видов.
Фракталы и фрактальная размерность. Кривая Коха. Треугольник и салфетка Серпинского. Канторово множество. Канторов стержень, чертова лестница. Примеры фрактальных множеств в живых системах. Формирование крон деревьев. Альвеолы легких. Мембраны митохондрий.
28 октября Лекция 9. Модели взаимодействия видов
Гипотезы Вольтерра. Аналогии с химической кинетикой. Вольтерровские модели взаимодействий. Классификация типов взаимодействий. Конкуренция. Хищник-жертва. Обобщенные модели взаимодействия видов. Модель Колмогорова. Модель взаимодействия двух видов насекомых МакАртура. Пространственно-временные агентные модели взаимодействия видов.
11 ноября Лекция 10. Моделирование микробных популяций. Модели эпидемий
Часть 1. Моделирование микробных популяций. Микробные популяции как объект моделирования и управления. Непрерывная культура микроорганизмов. Модель Моно. Микроэволюционные процессы в микробных популяциях. Возрастные распределения. Двухвозрастная модель. Непрерывные возрастные распределения.
Часть 2. Модели эпидемий. Эпидемия в замкнутой популяции. Эпидемиологическая кривая. Классическая модель SIR. Базовое репродуктивное число инфекции. Модель COVID-19.
- Просмотр презентации в YouTube
- Загрузить видео презентации (MP4)
- Демонстрация PowerPoint с голосовым сопровождением
18 ноября Лекция 11. Распределенные биологические системы
Уравнение реакция-диффузия. Почему возникают периодические структуры и волны. ААктивные кинетические среды в живых системах. Проблема формообразования. Распространение волн возбуждения. Пространственные структуры и автоволновые процессы в химических и биохимических реакциях.
Уравнение диффузии. Начальные и граничные условия. Решение уравнения диффузии. Решение однородного уравнения диффузии с нулевыми граничными условиями. Метод разделения переменных. Собственные значения и собственные функции задачи Штурма-Лиувилля. Решение неоднородного уравнения с нулевыми начальными условиями. Решение общей краевой задачи. Линейный анализ устойчивости гомогенных стационарных решений одного уравнения типа реакция-диффузия.
Устойчивость однородных стационарных решений системы двух уравнений типа реакция-диффузия. Диссипативные структуры. Линейный анализ устойчивости гомогенного стационарного состояния. Зависимость вида неустойчивости от волнового числа. Неустойчивость Тьюринга. Линейный анализ устойчивости гомогенного стационарного состояния распределенного Брюсселятора. Диссипативные структуры вблизи порога неустойчивости. Локализованные диссипативные структуры. Линейный анализ системы реакция-электродиффузия. Типы пространственно-временных режимов.
25 ноября Лекция 12. Распределенные триггеры и морфогенез. Модели раскраски шкур животных
Распределенные триггеры и морфогенез. Модели раскраски шкур животных. Дифференциация и морфогенез. Модель генетического триггера с диффузией (Чернавский и др.). Исследование устойчивости гомогенного стационарного состояния. Генетический триггер с учетом диффузии субстратов. Модель гидры Гирера-Майнхардта. Моделирование раскраски шкур животных. Модели агрегации амеб.
30 ноября Контрольная работа
2 декабря Лекция 13. Распространение импульсов, фронтов и волн. Модели распространения нервного импульса. Автоволновые процессы и сердечные аритмии
Распространение импульсов, фронтов и волн. Модель распространения фронта волны Петровского-Колмогорова-Пискунова-Фишера. Взаимодействие процессов размножения и диффузии. Локальные функции размножения. Автомодельная переменная. Распространение амброзиевого листоеда.
Модели распространения нервного импульса. Автоволновые процессы и сердечные аритмии. Распространение нервного импульса. Опыты и модель Ходчкина-Хаксли. Редуцированная модель ФитцХью-Нагумо. Возбудимый элемент локальной системы. Подпороговое и надпороговое возбуждение. Бегущие импульсы. Детальные модели кардиоцитов. Аксиоматические модели возбудимой среды. Автоволновые процессы и сердечные аритмии.
Реакция Белоусова-Жаботинского – базовая модель нелинейного пространственно-временного поведения. Модель образования зон кислотного и щелочного рН вдоль мембраны клеточной водоросли Chara corallina.
9 декабря Лекция 14. Молекулярное моделирование
Иерархия масштабов биологических систем и типы моделей. Квантово-механические методы. Основы метода молекулярной динамики. Рентгеноструктурные данные. Библиотеки фрагментов. Генерация трехмерных координат. Потенциалы молекулярных взаимодействий. Совмещение молекулярных полей. Принципы организации структуры белков. Моделирование белков по гомологии. Процедуры оптимизации. Валидация моделей белков. Виртуальный скрининг и докинг. Разработка лекарственных веществ с использованием методов молекулярного моделирования. Компьютерные пакеты.
16 декабря Лекция 15. Кинетические и Монте Карло модели процессов в фотосинтетической мембране
Модели биологического электронного транспорта. Окислительно-восстановительные реакции в растворе и в мультиферментных комплексах, локализованных в мембране. Процессы в энергопреобразующих мембранах митохондрий и хлоропластов. Перенос электрона в мультиферментном комплексе. Графы состояний. Примеры переноса электрона в комплексах двух и трех переносчиков. Обмен электронами комплекса с подвижными переносчиками. Модель переноса электронов в изолированной фотосистеме 2. Упрощенная и детальная кинетические модели взаимодействия фотосистем 1 и 2. Метод Монте-Карло моделирования процессов в ансамблях фотосинтетических цепей.
23 декабря Лекция 16. Броуновские и молекулярные модели первичных процессов фотосинтеза
Компьютерное многочастичное моделирование. Броуновское движение подвижных переносчиков и их электростатические взаимодействия с мембранными комплексами. Броуновское описание образования предварительного комплекса белков – донора и акцептора электрона. Молекулярное описание процессов образования финального комплекса. Роль сложного интерьера клетки в кинетике наблюдаемых процессов. Модели, использующие разные типы описания процессов в фотосинтетической мембране: электронный транспорт внутри комплексов, взаимодействие подвижных белков-переносчиков с фотосинтетическим реакционным центром, пространственно-временная эволюция протонного потенциала.
http://spkurdyumov.ru/education/kurs-lekcij-matematicheskie-modeli-v-biologii/
http://mathbio.ru/lectures/