iSopromat.ru

Силы инерции и моменты сил инерции возникают при изменении скорости движения звеньев механизма. Силы инерции препятствуют движению при ускорении и способствуют ему при замедлении.
Формулы для определения:
Силы инерции звена
Момента сил инерции
где
mi – масса звена;
Isi – центральный момент инерции;
asi – ускорение центра масс звена.
Знак «-» показывает, что вектор Fui направлен против вектора ускорения asi (определяют из плана ускорений), а Mui – против углового ускорения i — го звена.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
ОПРЕДЕЛЕНИЕ СИЛ ИНЕРЦИИ В МЕХАНИЗМАХ
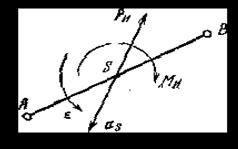
Силы инерции материальных точек звена могут быть приведены к одной точке и, таким образом, представлены их главным вектором и главным моментом.
Главный вектор сил инерции, называемый обычно силой инерции звена, равен
 . (3.1)
. (3.1)
где m[кг] – масса звена, aS[мсек -2 ] – ускорение центра S масс звена. Направление силы инерции Pи противоположно по направлению вектора aS. Её размерность [кгмсек -2 ], т.е. она измеряется в ньютонах [Н].
Мы ограничимся рассмотрением случаев, когда звено совершает плоскопараллельное движение и имеет плоскость материальной симметрии, параллельную плоскости его движения. При этом точкой приведения сил инерции звена целесообразно брать его центр масс (рисунок 3.1), так как упрощается выражение момента инерционной пары сил – главного момента сил инерции, что то же, инерционного момента. Он оказывается равным
 , (3.2)
, (3.2)
где IS [кгм 2 ] – момент инерции масс звена относительно оси, проходящей через его центр масс перпендикулярно плоскости его материальной симметрии, или, иначе, центральный момент инерции звена, ε [сек -2 ] — угловое ускорение звена.
Инерционный момент Ми имеет размерность [кгмсек -2 ]=[Нм]. Плоскость, в которой он действует, параллельна плоскости движения звена; он направлен в сторону, противоположную направлению углового ускорения звена (рисунок 3.1).
|
|
Частные случаи инерционной нагрузки
· Поступательное движение звена (рисунок 3.2, а). Инерционная нагрузка состоит из одной инерционной силы Ри, определяемой формулой (3.1).
· Неравномерное вращательное движение звена (рисунок 3.2, б). Инерционная нагрузка состоит из силы инерции Ри, определяемой формулой (3.1), и инерционного момента Ми, определяемого формулой (3.2). Модуль полного ускорения центра масс звена в этом случае равен
 , (3.3)
, (3.3)
где  и
и  — нормальное (центростремительное ) и касательное (тангенциальное) ускорения центра масс звена, ω и ε – угловая скорость и угловое ускорение звена, ℓAS – расстояние от центра масс S до оси А вращения звена.
— нормальное (центростремительное ) и касательное (тангенциальное) ускорения центра масс звена, ω и ε – угловая скорость и угловое ускорение звена, ℓAS – расстояние от центра масс S до оси А вращения звена.
Силу Ри и момент Ми можно привести к одной силе  .
.
Для этого следует силу Ри приложить, сохраняя ее направление, в центре К качания звена (рисунок 3.2, в). Расстояние ℓAK центра качания К звена от оси вращения последнего А равно
 , (3.4)
, (3.4)
где IS – центральный момент инерции звена, а m – его масса.
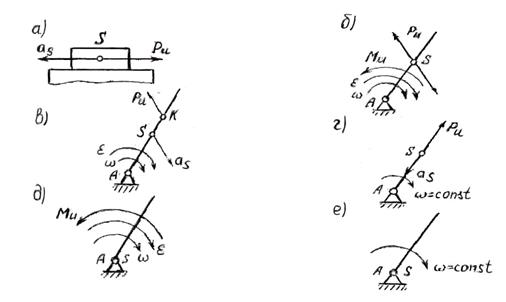
Рисунок 3.2 – Частные случаи инерционной нагрузки
· Равномерное вращательное движение звена (рисунок 3.2, г). Инерционная нагрузка состоит только из силы инерции Ри звена, которая в этом случае направлена по линии AS противоположно направлению вектора центростремительного (нормального) ускорения центра масс звена. Это ускорение равно
 , (3.5)
, (3.5)
и, следовательно, центробежная сила инерции будет рана
 . (3.6)
. (3.6)
Произведение mℓAS называется неуравновешенностью или дисбалансом и имеет размерность [кг·м].
· Неравномерное вращательное движение звена при совпадении центра масс S звена с его осью вращения А (рисунок 3.2, д). В этом случае инерционная нагрузка звена состоит только из инерционного момента Ми, который находится по формуле (3.2).
· Равномерное вращательное движение звена при совпадении центра масс S звена с его центром вращения А (рис. 3.2, е). В этом случае ℓAS = 0 и в соответствии с формулой (3.3) aS=0, следовательно, Ри=0, и так как ε=0 (равномерное вращение), то Ми=0.
В этом случае инерционная нагрузка звена равна нулю и оно называется уравновешенным (следует помнить, что рассматривается плоская система сил).
Пример. Для кривошипно-ползунного механизма (рисунок 3.3) определить инерционную нагрузку всех звеньев.
Задачу решить для положения, когда угол φ=45 о .
Решение. 1). Построение схемы механизма (рисунок 3.3, а).
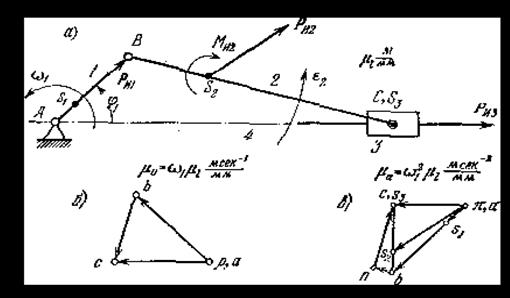
Рисунок 3.3 – Определение инерционной нагрузки звеньев
Задаемся масштабом чертежа μℓ=0,001 м/мм и строим схему механизма. Чертежные длины звеньев определятся
2). Построение плана скоростей(рисунок 3.3,б). Рассчитываем масштаб скорости в масштабе кривошипа.μυ = ω1 μℓ=200·0,001= 0,20  . Тогда длина вектора скорости υВ, т.е. отрезок (Рb), будет равен (АВ)=(Рb)=74 мм. Точку “с” на плане скоростей находим по векторному уравнению
. Тогда длина вектора скорости υВ, т.е. отрезок (Рb), будет равен (АВ)=(Рb)=74 мм. Точку “с” на плане скоростей находим по векторному уравнению
 .
.
3). Построение плана ускорений(рисунок 3.3, в). Строим план ускорений в масштабе кривошипа

Тогда на плане ускорений отрезок (πb), изображающий вектор нормального ускорения точки В, будет равен (АВ)=(πb)=74 мм. Точку “с” находим по векторному уравнению
 .
.
Отрезок (nb), изображающий на плане нормальное ускорение  , определится из равенства
, определится из равенства
где (bс)=52 мм – отрезок, замеренный с плана скоростей.
ТочкиS1, S2определим по правилу подобия, п.2. Но т.к. план ускорений построен в масштабе кривошипа, то (πs1)=(AS1)= 20 мм, (bs2)=(BS2)= 60 мм. Тогда ускорения центров масс определятся
Угловые ускорения находятся по формулам

Направление ε2 будет против часовой стрелки в соответствие с направлением  тангенциального ускорения точки С звена ВС относительно точки В (рисунок 3.3, а).
тангенциального ускорения точки С звена ВС относительно точки В (рисунок 3.3, а).
4). Расчет инерционной нагрузкидля каждого звена.
а)Расчет инерционных сил.Сила инерции кривошипа равна
Вектор силы инерции приложен к центру масс кривошипа и направлен в противоположную сторону вектору ускорения aS1.
Сила инерции шатуна
Вектор силы инерции приложен к центру масс шатуна и направлен в противоположную сторону вектору ускорения aS2.
Сила инерции ползуна
Вектор силы инерции приложен к центру масс ползуна и направлен в противоположную сторону вектору ускорения aС.
б)Расчет инерционных моментов. Для кривошипа инерционный момент равен Ми1=0, т.к. звено вращается равномерно.
Для шатуна инерционный момент определится по формуле
Этот момент направлен в противоположную сторону угловому ускорению.
Для ползуна момент инерции Ми3=0, т.к. звено движется поступательно.
Дата добавления: 2015-06-01 ; просмотров: 9976 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Определение сил инерции звеньев
1. При поступательном движении звена равнодействующая сил инерции всех элементарных масс

приложена в центре S масс звена и направлена противоположно ускорению  центра S масс звена (рис. 12).
центра S масс звена (рис. 12).
2. Если звено совершает вращательное движение вокруг оси, совпадающий с центром масс, то силы инерции всех элементарных масс можно свести к паре сил с моментом (рис. 13):
 [Н·м],
[Н·м],
где  — статический момент инерции звена относительно оси, проходящей через центр масс перпендикулярно плоскости движения.
— статический момент инерции звена относительно оси, проходящей через центр масс перпендикулярно плоскости движения.
Знак «-» в формуле для Мин указывает на то, что момент направлен в сторону, противоположную угловому ускорению.
Моментом инерции тела Js относительно какой-либо оси называется величина, равная сумме произведений элементарных масс этого тела на квадрат их расстояния до этой оси:
 [кг·м 2 ].
[кг·м 2 ].
3. Звено совершает сложное движение (рис. 14). В этом случае движение звена раскладывается на переносное поступательное со скоростью и ускорением центра масс и на относительное вращательное движение вокруг центра масс.
Силы инерции всех элементарных масс сводятся к равнодействующей силе инерции  и к паре сил с моментом.
и к паре сил с моментом.  .
.
Сила инерции приложена в центре S масс звена и направлена в сторону, противоположную ускорению центра масс; момент инерции направлен в сторону, противоположную ε.
4. Звено совершает вращательное движение относительно оси, не проходящей через центр масс звена (рис. 15).
Этот случай рассматриваем как общий случай сложного движения звена: силы инерции всех элементарных масс также сводятся к равнодействующей силе инерции  и к паре сил с моментом
и к паре сил с моментом  .
.
1.5.2 Определение Fин и Mин для кривошипно-ползунного механизма (рис. 16)
Пусть центр масс 1 звена S1 находится в точке А (в центре вращения звена 1), S3 совпадает с точкой С; S2— посередине звена 2.
Для определения Fинi и Mинi; надо знать линейные ускорения центров масс и угловые ускорения звеньев, для чего (при графическом решении задачи) необходимо построить планы скоростей и ускорений (рис. 17, а, б).
Звено 1 совершает равномерное вращательное движение (так как ω1 = const, то  ). Центр масс неподвижен и as = 0, следовательно, Fин1 = 0.
). Центр масс неподвижен и as = 0, следовательно, Fин1 = 0.
Звено 2 совершает плоскопараллельное движение:
 ,
,  .
.
Для нахождения ускорения точки S2 воспользуемся теоремой о подобии:

Рис. 12. Сила инерции звена при его поступательном движении (момент сил инерции равен нулю)

Рис. 13. Момент инерции звена при его вращении вокруг оси, проходящей через центр масс звена (сила инерции равна нулю)

Рис. 14. Сила и момент сил инерции звена, совершающего сложное движение

Рис. 15. Сила инерции и момент сил инерции звена, вращающегося вокруг оси, не проходящей через центр масс звена

Рис16. К определению сил и моментов сил инерции кривошипно-ползунного механизма
| с, |
| В |
| В |
Рис. 17. План скоростей (а) и план ускорений (б) кривошипно-ползунного механизма
Найденный отрезок откладываем от точки в. Чтобы найти абсолютное ускорение центра масс, полученную точку s2 соединяем с полюсом плана ускорений. Тогда  .
.
Сила инерции приложена в центре масс S2 и направлена в противоположную сторону от ускорения центра масс (рис. 16).
Для нахождения момента инерции  .
.
найдем угловое ускорение звена 2:
 [ 1 / с 2 ].
[ 1 / с 2 ].
Для определения направления ε2 перенесем вектор тангенциальной составляющей с плана ускорений на план механизма в точку С. Этот вектор показывает направление ε2; Мин2 направлен в противоположную сторону.
Звено 3 совершает поступательное движение в направляющих стойки. Сила инерции этого звена найдется как:
 и направлена в противоположную сторону от as3. Мин3 = 0, так как ε3 = 0.
и направлена в противоположную сторону от as3. Мин3 = 0, так как ε3 = 0.
1.5.3 Определение реакций в кинематических парах и уравновешивающей силы кривошипно-шатунного механизма (рис. 18)
Силовое исследование механизма ведут по группам Ассура, начиная его с последней присоединенной группы Ассура, для которой известны все внешние силы, и заканчивают расчет рассмотрением начального звена, на котором требуется определить уравновешивающую силу или момент.

Рис. .18. Силовой расчет кривошипно-ползунного механизма
Рис. 19. Реакции, действующие на звенья в группе Ассура второго класса, второго порядка,2-го вида

Рис. 20. Силовой многоугольник для определения реакций, действующих на звенья группы Ассура 2-го вида
При силовом расчете за начальное звено принимают звено, на котором требуется определить Fyp или Мур.
Звенья 2 и 3 образуют структурную группу Ассура второго класса, второго порядка, 2-го вида, для которой известна внешняя сила F.
Изобразим структурную группу звеньев 2—3 в том же положении и в том же масштабе, что и на схеме механизма. Покажем реакции F21 и F30, которые заменяют действие отброшенных звеньев 1 и 0 (рис. 19).
Составим таблицу, в которую будем записывать последовательность определения реакций, уравнения, которые надо составить для определения этих реакций и номера звеньев, для которых записываются эти уравнения.
| Что определяем | Каким уравнением | Для какого звена |
 | ΣМс = 0 | |
 и и  | Σ  = 0 = 0 | 2 и З |
 (или (или  ) ) | Σ  = 0 = 0 | 2 (или 3) |
- Определим тангенциальную составляющую
 :
:
 :
:  ,
,

- Для нахождения и составляем векторное уравнение сил:
 и
и  составляем векторное уравнение сил:
составляем векторное уравнение сил:  (3)
(3)
Выбираем масштаб для построение силового многоугольника:
 [Н/мм]
[Н/мм]
где аб – произвольный вектор изображающий  в масштабе
в масштабе  .
.
Определим отрезки, которыми будут изображать в масштабе  остальные силы:
остальные силы:
 [мм],
[мм],  [мм] и т.д.
[мм] и т.д.
После этого строим замкнутый (т.к. Σ = 0) силовой многоугольник (Рис. 20) в той последовательности, в которой записаны силы, при определении Σ , в результате чего найдем векторы, изображающие искомые реакции. Величины этих реакций будут равны:
 [Н] и
[Н] и  [Н].
[Н].
Полная реакция  будет складываться из ее нормальной и тангенциальной составляющих:
будет складываться из ее нормальной и тангенциальной составляющих:
 .
.
Величина силы  будет равна:
будет равна:  [Н].
[Н].
Для нахождения реакции  составим векторные уравнения:
составим векторные уравнения:
 .
.
Первые четыре вектора в соответствии с уравнением (3) уже построены на рис.20. Поэтому для определения величины и направления силы  соединяем начало вектора
соединяем начало вектора  с концом вектора
с концом вектора  .
.
В зависимости от вида привода определяется либо уравновешивающая сила Fyp, либо уравновешивающий момент Мур.
В исследовании условно можно принять за точку приложения силы Fyp точку В кривошипа и считать, что линия действия этой силы перпендикулярна кривошипу АВ.
Если начальное звено приводится в движение через муфту, то определяется Мур.
Вариант 1. Определение Fyp (рис. 21, а).
| FyP | Σ MA = 0. |
 | Σ  = 0 = 0 |
1)  ,
,
откуда  [Н]
[Н]
2) 
В соответствии с записанным уравнением строим замкнутый векторный многоугольник сил (рис. 21, б), из которого определяем 
. 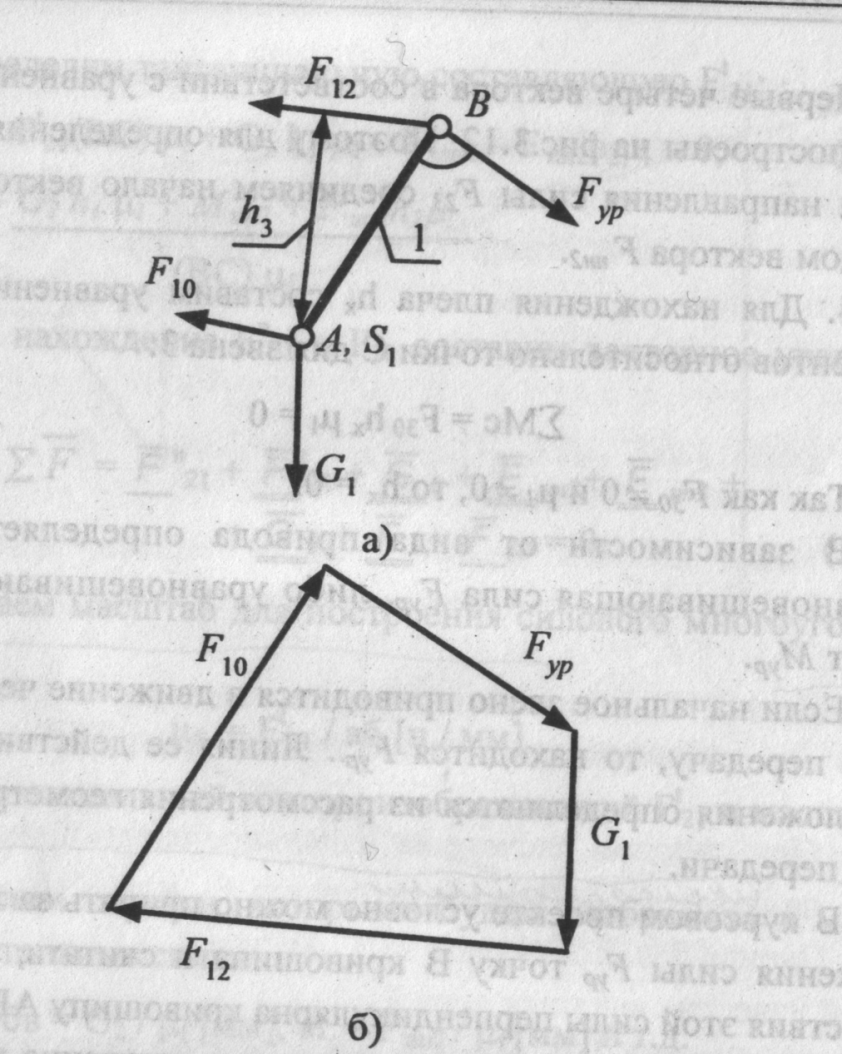
Рис. 21. Расчет начального звена при действии на него уравновешивающей силы:
а) силы, действующее на звено,
б) силовой многоугольник.
Вариант 2. Определение Мур (рис. 22 а, б).
| МyP | Σ MA = 0. |
 | Σ = 0 |
1)  ,
,
откуда  [Н·м]
[Н·м]
2) 
План сил для определения  представлении на рис. 22, б.
представлении на рис. 22, б.

Рис. 22. Силовой расчет начального звена при действии на него уравновешивающего момента:
http://helpiks.org/3-67729.html
http://lektsia.com/1×7084.html