Плоскость в трехмерном пространстве с примерами решения
Содержание:
Общее уравнение плоскости:
Пусть 

которое называется уравнением плоскости, проходящей через точку  и имеющей нормальный вектор
и имеющей нормальный вектор  . Его можно преобразовать к виду
. Его можно преобразовать к виду
 (8.1.2)
(8.1.2)
где  . Уравнение (8.1.2) называется общим уравнением плоскости.
. Уравнение (8.1.2) называется общим уравнением плоскости.
Приведём уравнение плоскости (8.1.2) к специальному виду. Для этого перенесём свободный член в правую часть уравнения:  .
.
Разделим обе части уравнения на —D получим:
 (8.1.3)
(8.1.3)
Это и есть специальный вид уравнения плоскости или уравнение плоскости «в отрезках», где а, b, с — величины отрезков, которые отсекает плоскость на координатных осях.
Если плоскость проходит через точки  , не лежащие на одной прямой, то её уравнение можно записать в виде
, не лежащие на одной прямой, то её уравнение можно записать в виде

Разложив данный определитель по элементам первой строки, придём к уравнению вида (8.1.1).
Уравнения (8.1.1), (8.1.3), (8.1.4) можно привести к виду (8.1.2).
Пример:
Составить уравнение плоскости, проходящей через точки А(0, -2, -1), В(2, 4, -2) и С(3, 2, 0).
Решение:
Воспользуемся формулой (8.1.4), где 

Подставив координаты точек A, В и С, получим:  Разложим определитель по элементам первой строки:
Разложим определитель по элементам первой строки: Вычислив три определителя второго порядка, получим уравнение:
Вычислив три определителя второго порядка, получим уравнение:  . Сократив на 5 и приведя подобные, найдем уравнение искомой плоскости АВС:
. Сократив на 5 и приведя подобные, найдем уравнение искомой плоскости АВС:  .
.
Взаимное расположение двух плоскостей, прямой и плоскости
Углом между прямой и плоскостью будем называть угол, образованный прямой и ее проекцией на плоскость (рис. 8.1). Пусть прямая L и плоскость а заданы уравнениями:
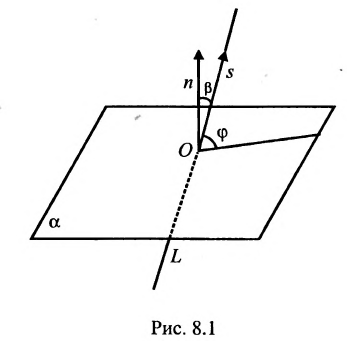

Рассмотрим направляющий вектор  прямой L и нормальный вектор
прямой L и нормальный вектор  плоскости
плоскости  (рис. 8.1). Если угол
(рис. 8.1). Если угол  между ними острый, то его можно представить в виде разности
между ними острый, то его можно представить в виде разности , где
, где  — угол между прямой L й плоскостью
— угол между прямой L й плоскостью  . Тогда косинус угла между векторами
. Тогда косинус угла между векторами  и
и  равен синусу угла между прямой L и плоскостью
равен синусу угла между прямой L и плоскостью  т.е.
т.е.
 .
.
Если угол  между векторами
между векторами  тупой, то его можно представить в виде суммы
тупой, то его можно представить в виде суммы  . Поэтому в любом случае
. Поэтому в любом случае  . Воспользовавшись формулой вычисления косинуса угла между векторами, получим формулу и для вычисления угла между прямой L и плоскостью
. Воспользовавшись формулой вычисления косинуса угла между векторами, получим формулу и для вычисления угла между прямой L и плоскостью :
:

Условие перпендикулярности прямой и плоскости. Прямая и плоскость перпендикулярны тогда и только тогда, когда направляющий вектор  прямой L и нормальный вектор
прямой L и нормальный вектор  плоскости
плоскости  коллинсарны, т.е. их координаты пропорциональны:
коллинсарны, т.е. их координаты пропорциональны:

Условие параллельности прямой и плоскости. Прямая L и плоскость  параллельны тогда и только тогда, когда векторы
параллельны тогда и только тогда, когда векторы  и
и
 перпендикулярны, т.е. их скалярное произведение равно нулю:
перпендикулярны, т.е. их скалярное произведение равно нулю:  (8.2.3)
(8.2.3)
Пример:
Написать уравнение плоскости, проходящей через точку  параллельно прямым
параллельно прямым  и
и
Решение:
Так как  , то уравнение плоскости будем искать в виде
, то уравнение плоскости будем искать в виде

Применяя условие параллельности (8.2.3) прямой и плоскости, получим систему линейных уравнений
где 
Решив систему, найдем:
Подставив найденные значения коэффициентов А,В,С, полУ
чим искомое уравнение плоскости:


Угол между плоскостями. Рассмотрим две плоскости  заданные соответственно уравнениями:
заданные соответственно уравнениями:
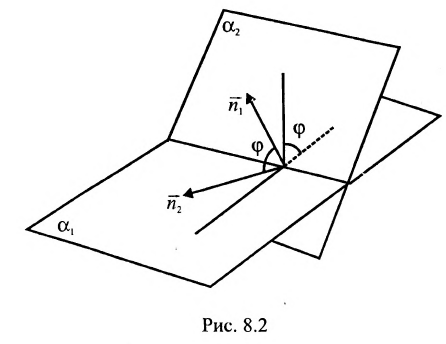
Под углом между двумя плоскостями будем понимать один из двугранных углов, образованных этими плоскостями. Очевидно,
что угол между нормальными векторами  плоскостей
плоскостей  равен одному из указанных смежных двугранных углов
равен одному из указанных смежных двугранных углов 
или  .Поэтому
.Поэтому  . Т.к.
. Т.к.  и
и
 , то
, то

Пример:
Определить угол между плоскостями 

Решение:
Воспользовавшись формулой (8.2.4), получим:

Условие параллельности двух плоскостей. Две плоскости  параллельны тогда и только тогда, когда их нормальные векторы
параллельны тогда и только тогда, когда их нормальные векторы  и
и  параллельны.
параллельны.
Векторы параллельны, если их координаты пропорциональны:

Две плоскости перпендикулярны тогда и только тогда, когда их нормальные векторы  перпендикулярны. Следовательно, их скалярное произведение равно нулю:
перпендикулярны. Следовательно, их скалярное произведение равно нулю:  , или
, или  (8.2.6)
(8.2.6)
Пример:
Составить уравнение плоскости, проходящей через точку M(-2, 1, 4) параллельно плоскости  .
.
Решение:
Уравнение плоскости будем искать в виде  . Из условия параллельности плоскостей следует, что:
. Из условия параллельности плоскостей следует, что:  . Положив А=3, В=2, С=-7, получим уравнение плоскости
. Положив А=3, В=2, С=-7, получим уравнение плоскости
Так как  , то координаты этой точки удовлетворяют уравнению. Подставив координаты точки, — 6+2 — 28+D=0, найдем D = 32. Тогда искомое уравнение плоскости будет иметь вид: 3х + 2у -7z + 32=0.
, то координаты этой точки удовлетворяют уравнению. Подставив координаты точки, — 6+2 — 28+D=0, найдем D = 32. Тогда искомое уравнение плоскости будет иметь вид: 3х + 2у -7z + 32=0.
Пример:
Составить уравнение плоскости, проходящей через точки перпендикулярно плоскости x+y+z=0.
перпендикулярно плоскости x+y+z=0.
Решение:
Так как  , то используя уравнение плоскости, проходящей через заданную точку, будем иметь
, то используя уравнение плоскости, проходящей через заданную точку, будем иметь

Далее, так как  , то подставив координаты точки в записанное уравнение, получим равенство -А-2С = 0 или А + 2С = 0.
, то подставив координаты точки в записанное уравнение, получим равенство -А-2С = 0 или А + 2С = 0.
Учитывая, что заданная плоскость перпендикулярна искомой, составим еще одно уравнение: A+B+С=0. Получим систему:
Выразив коэффициенты А и В через С: А = -2 С, В=С и подставив их в уравнение (8.2.7), -2С (х-1)+С (у-1)+С (z-l)=0, определяем искомое уравнение: —2х + у +z = 0 .
Понятие гиперплоскости
Взаимное расположение гиперплоскостей:
Рассмотрим n-мерное векторное пространство Пусть вектор  этого пространства имеет координаты
этого пространства имеет координаты  . По аналогии с пространством
. По аналогии с пространством  , естественно считать, что и в n-мерном векторном пространстве
, естественно считать, что и в n-мерном векторном пространстве  координаты
координаты  произвольного вектора
произвольного вектора  являются в то же время координатами некоторой точки М пространства
являются в то же время координатами некоторой точки М пространства  . Тогда вектор х назовём радиус-вектором точки М Следовательно, каждому вектору можно поставить в соответствие точку и мы получим n-мерное точечное пространство
. Тогда вектор х назовём радиус-вектором точки М Следовательно, каждому вектору можно поставить в соответствие точку и мы получим n-мерное точечное пространство . Точка О с координатами (О, 0, . 0) называется началом координат. Ей отвечает нулевой вектор. Геометрическое место точек
. Точка О с координатами (О, 0, . 0) называется началом координат. Ей отвечает нулевой вектор. Геометрическое место точек  называется координатной осью. Следовательно. в
называется координатной осью. Следовательно. в  имеется n координатных осей:
имеется n координатных осей: 
Совокупность точек  называется координатной гиперплоскостью
называется координатной гиперплоскостью  .
.
Определение 8.3.1. Гиперплоскостью в п-мериом пространстве  называется геометрическое место точек, координаты которых удовлетворяют линейному (векторному) уравнению:
называется геометрическое место точек, координаты которых удовлетворяют линейному (векторному) уравнению:

где  — произвольные действительные числа.
— произвольные действительные числа.
Заметим, что все  не могут равняться нулю.
не могут равняться нулю.
Рассмотрим две гиперплоскости:

Множество точек, принадлежащих как первой, так и второй гиперплоскости, называется их пересечением.
Теорема 8.3.1. Две гиперплоскости (8.3.2) и (8.3.3) не пересекаются в том и только в том случае, когда коэффициенты при соответствующих неизвестных пропорциональны, а свободные члены находятся в ином отношении:

Доказательство. Пусть гиперплоскости (8.3.2) и (8.3.3) не пересекаются. Следовательно, они не имеют общих точек и система
 несовместна.
несовместна.
И наоборот, если система несовместна, то гиперплоскости (8.3.2) и (8.3.3) не пересекаются.
В силу теоремы Кронекера- Капелли система (8.3.5) несовместна, если ранг матрицы не равен рангу расширенной матрицы системы. А так как ранг расширенной матрицы системы не больше 2, то ранг матрицы системы должен ть равен 1. Эта возможность выражается условием (8.3.4).Поскольку для того, чтобы матрица  имела ранг r = 1, нужно, чтобы строки были линейно зависимы, т.е. пропорциональны.
имела ранг r = 1, нужно, чтобы строки были линейно зависимы, т.е. пропорциональны.
Ранг матрицы  будет равен двум, если существует хотя бы один определитель второго порядка не равный нулю, т.е. если строки не пропорциональны. Теорема доказана.
будет равен двум, если существует хотя бы один определитель второго порядка не равный нулю, т.е. если строки не пропорциональны. Теорема доказана.
Теорема 8.3.2. Для того, чтобы уравнения (8.3.2) и (8.3.3) определят одну и ту же гиперплоскость, необходимо и достаточно, чтобы выполнялись условия:

Доказательство. Достаточность. Пусть условия (8.3.6) выполнены. Обозначим отношения через t, т.е.
Тогда уравнение (8.3.2) можно получить из (8.3.3) умножением всех его членов на t. Поэтому уравнения равносильны и, следовательно, определяют одну и ту же гиперплоскость.
Необходимость. Пусть уравнения (8.3.2) и (8.3.3) определяют одну и ту же гиперплоскость. Система (8.3.5) совместна и, следовательно, ранг матрицы системы равен рангу расширенной матрицы. И т.к. эта система определяет одну гиперплоскость, то каждое из уравнений можно рассматривать как систему. Поэтому ранг этой системы равен 1 и все миноры второго порядка равны нулю, т.е.
Откуда следует, что
Определение 8.3.2. Две гиперплоскости называются параллель-ными, если они не пересекаются или совпадают.
Тогда из теорем 8.3.1 и 8.3.2 вытекает
Теорема 8.3.3. Две гиперплоскости (8.3.2) и (8.3.3) параллельны тогда и только тогда, когда соответствующие коэффициенты
пропорциональны, т.е. 
Введем понятие прямой в n мерном пространстве по аналогии с параметрическими уравнениями прямой в трехмерном пространстве.
Определение 8.3.3. Прямой в  называется множество точек
называется множество точек  (или векторов
(или векторов  , удовлетворяющих уравнениям:
, удовлетворяющих уравнениям:
где  , a t- переменный параметр,
, a t- переменный параметр,  .
.
Определение 8.3.4. Отрезком в  называется множество точек
называется множество точек  (или векторов
(или векторов  ), удовлетворяющих уравнениям (8.3.7) при изменении параметра t в закрытом интервале
), удовлетворяющих уравнениям (8.3.7) при изменении параметра t в закрытом интервале  . Точки
. Точки  называются концами отрезка.
называются концами отрезка.
Теорема 8.3.4. Всякая точка отрезка может быть выражена линейной комбинацией его концов:

Если в трехмерном пространстве провести плоскость, то она разделит его на две части, называемые полупространствами. Очевидно, и гиперплоскость разделит n-мерное пространство на полупространства, т.е. справедливо.
Определение 8.3.5. Полупространствами, порождаемыми гиперплоскостью  называются два множества точек, удовлетворяющих соответственно условиям:
называются два множества точек, удовлетворяющих соответственно условиям:

Гиперплоскость принадлежит обоим полупространствам, является их общей частью. Из (8.3.9) следует, что любое линейное неравенство геометрически определяет полупространство соответствующей размерности.
Определение 8.3.6. Множество точек  удовлетворяющих условию
удовлетворяющих условию  или
или  называется гиперсферой с центром в точке
называется гиперсферой с центром в точке  и радиусом r.
и радиусом r.
Системы m линейных неравенств с n неизвестными
В элементарной математике мы познакомились с линейными неравенствами одного или двух переменных:

Решением таких неравенств является промежуток числовой оси или полуплоскость.
Рассмотрим теперь линейное неравенство с n переменными:
 в n-мерном пространстве.
в n-мерном пространстве.
Несколько неравенств, рассматриваемых совместно, образуют систему:

Определение 8.4.1. Областью решений системы т неравенств с п неизвестными называется множество точек пространства  координаты которых удовлетворяют каждому из неравенств системы.
координаты которых удовлетворяют каждому из неравенств системы.
Из того факта, что областью решения линейного неравенства является полупространство, вытекает
Теорема 8.4.1. Область решений системы линейных неравенств есть пересечение некоторого числа полупространств.
Это пересечение является выпуклым множеством; оно ограничено гиперплоскостями

Так как линейные неравенства (8.4.1) независимы, то система (8.4.2) при m-n будет либо определённой, либо несовместной. И, следовательно, пересечение n гиперплоскостей в n-мерном пространстве либо даёт точку, либо не содержит ни одной точки.
Так как число систем по n уравнений с n неизвестными, которое может быть получено из (8.4.2) не может быть сколь угодно большим, и так как не всякая точка пересечения гиперплоскостей (является решением) принадлежит пересечению всех m гиперплоскостей, то число крайних точек, т.е. точек пересечения гиперплоскостей, принадлежащих данному множеству, ограничено. Следовательно, рассматриваемое множество будет многогранником, а крайние точки — его вершинами.
Итак, .областью решений совместной системы линейных нера-qchqtb является выпуклый многогранник, гранями которого служат некоторые части гиперплоскостей.
Пример:
Найти решение системы линейных неравенств
Решение:
Строим на плоскости  граничные прямые:
граничные прямые: 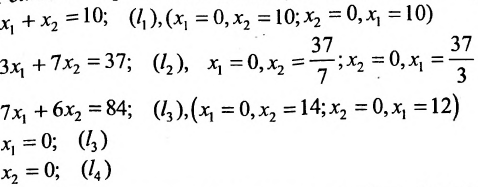
соответствующие заданным неравенствам (рис. 8.3). Каждая из них делит плоскость на две полуплоскости, одна из которых является решением соответствующего неравенства. Для выбора полуплоскости, являющейся решением неравенства, подставляем начало координат О (0, 0) в каждое неравенство. Если получаем верное неравенство, то полуплоскость, содержащая начало координат, является решением неравенства, в противном случае — полуплоскость, не содержащая начало координат, является решением неравенства.
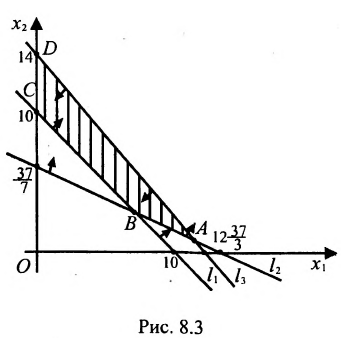
Стрелки указывают полуплоскости, являющиеся областями решений данных неравенств. Пересечение отмеченных полуплоскостей- заштрихованный четырехугольник АВСД на рис. 8.3- область решения данной системы.
Применение систем линейных неравенств в экономических исследованиях
Рассмотрим систему m линейных неравенств с n переменными:
Каждое неравенство системы определяет полупространство. Решением системы (8.5.1) является пересечение этих полупространств.
Системы линейных неравенств широко применяются во многих экономических задачах, в частности, при построении линейной модели производства. Производственный способ описывает производство продукции и расход ресурсов в единицу времени. Он математически задается вектором выпуска или вектором валовой продукции  и вектором
и вектором  называемым вектором затрат, отвечающим выпуску x.
называемым вектором затрат, отвечающим выпуску x.
Если в производственной системе используется m видов производственных ресурсов, определены запасы ресурса i при использовании j-той технологии, то модель производственной системы математически приобретает вид системы линейных неравенств (8.5.1), в которой  .
.
Пример:
Пусть известно содержание питательных веществ в единице каждого из имеющихся в хозяйстве кормов. Известна также цена каждого корма. Требуется определить все возможные рационы для кормления скота, которые удовлетворяли бы суточную потребность в каждом питательном веществе, а общая стоимость используемых кормов не превосходила бы A.
Решение:
Введем обозначения: m — число питательных веществ; n — число изменяющихся видов кормов;  —количество единиц i -го питательного вещества в единице j -го корма;
—количество единиц i -го питательного вещества в единице j -го корма;  — дневная потребность в / -ом питательном веществе;
— дневная потребность в / -ом питательном веществе;  —стоимость единицы j -го корма;
—стоимость единицы j -го корма;  —количество единиц j-го корма, используемого в рационе
—количество единиц j-го корма, используемого в рационе  .
.
Задача рациона формулируется следующим образом: определить рацион  , удовлетворяющий условиям:
, удовлетворяющий условиям:
стоимость которого ограничена величиной А: 
 .
.
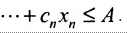
Например, пусть ;
;

Тогда получаем систему:
Определим множество решений данной системы на плоскости  . Вначале строим граничные прямые
. Вначале строим граничные прямые 

(рис. 8.4) соответствующие данным неравенствам. Каждая из них делит плоскость на две полуплоскости, одна из которых является решением соответствующего неравенства. Для выбора полуплоски являющейся решением неравенства, подставляем  в каждое неравенство.
в каждое неравенство.
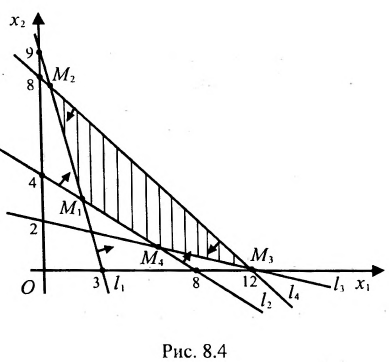
Если получаем верное неравенство, то полуплоскость, содержащая начало координат, является решением неравенства, в противном случае — полуплоскость, не содержащая начало координат, является решением неравенства.
Стрелки на прямых указывают полуплоскости, являющиеся областями решений данных неравенств. Заштрихованный четырехугольник  и определяет все возможные рационы
и определяет все возможные рационы  для кормления скота, удовлетворяющие данным условиям.
для кормления скота, удовлетворяющие данным условиям.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Функция одной переменной
- Производная функции одной переменной
- Приложения производной функции одной переменной
- Исследование поведения функций
- Ранг матрицы — определение и вычисление
- Определители второго и третьего порядков и их свойства
- Метод Гаусса — определение и вычисление
- Прямая линия на плоскости и в пространстве
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Уравнение плоскости. Уравнение прямой в пространстве. Виды уравнения плоскости. Общее уравнение плоскости
Страницы работы




Содержание работы
Глава 5 Уравнение плоскости. Уравнение прямой в пространстве.
5.1 Виды уравнения плоскости.
5.1.1 Общее уравнение плоскости.
Коэффициенты А, В, С в этом уравнении определяют так называемый нормальный вектор  , перпендикулярный плоскости, то есть являются его проекциями на оси декартовой системы координат
, перпендикулярный плоскости, то есть являются его проекциями на оси декартовой системы координат  . Приравнивая к нулю различные коэффициенты мы получаем частные виды общего уравнения плоскости.
. Приравнивая к нулю различные коэффициенты мы получаем частные виды общего уравнения плоскости.
а)  — уравнение плоскости принимает вид: Ах+Ву+Сz=0, такая плоскость проходит через начало координат.
— уравнение плоскости принимает вид: Ах+Ву+Сz=0, такая плоскость проходит через начало координат.
б)  — получаем уравнение: Ву+Сz+D=0, плоскость параллельна оси ОХ. Если коэффициент D=0:
— получаем уравнение: Ву+Сz+D=0, плоскость параллельна оси ОХ. Если коэффициент D=0:
Ву+Сz=0 – то плоскость проходит через ось ОХ.
в)  — получаем уравнение Ах+СZ+D=0 плоскость параллельна оси ОУ. В случае, если и коэффициент D=0:
— получаем уравнение Ах+СZ+D=0 плоскость параллельна оси ОУ. В случае, если и коэффициент D=0:
Ах+СZ=0 – плоскость координат проходит через ось ОУ.
г)  — получаем уравнение Ах+Ву+D=0 плоскость параллельна оси ОZ. В случае равенства нулю коэффициента D=0:
— получаем уравнение Ах+Ву+D=0 плоскость параллельна оси ОZ. В случае равенства нулю коэффициента D=0:
Ах+Ву=0 – плоскость проходит через ось ОZ.
д) 
CZ+D=0 – плоскость параллельна координатной плоскости ХОУ
е) 
AX+D=0 – плоскость параллельна координатной плоскости УОZ.
ж) 
ВУ+D=0 – плоскость параллельна координатной плоскости ХОZ.
5.1.2 Уравнение плоскости проходящей через заданную точку перпендикулярную заданному вектору.
Пусть задана точка  и вектор
и вектор  (Рис. 5.1)
(Рис. 5.1)
 z
z
 |
Рис. 5.1
Возьмем произвольную точку М (х,у,z), принадлежащую искомой плоскости Р. найдём проекции вектор  лежащего в плоскости Р.
лежащего в плоскости Р.

По условию вектор перпендикулярен плоскости Р, следовательно вектор перпендикулярен вектору . Используя условие перпендикулярности двух векторов получим  . Представляя скалярное произведение в координатной форме получим искомое уравнение.
. Представляя скалярное произведение в координатной форме получим искомое уравнение.
5.1.3 Уравнение плоскости проходящей через три заданные точки.
 z
z
 |
 |

 y
y
Рис. 5.2
Возьмём произвольную точку М(x,y,z) принадлежащую искомой прямой Р.
Рассмотрим векторы: 



Так как точки М1, М2, М3, М лежат в одной плоскости, то векторы — коллинеарные, следовательно их смешанное произведение равно нулю.

Представляя это произведение в координатной форме, получим искомое уравнение:
1. Уравнение плоскости в отрезках.
Рассмотрим плоскость пересекающую все три координатные оси и не проходящую через начало координат. Запишем уравнение этой плоскости в общем виде.

Пусть а, b, с длины отрезков отсекаемые плоскостью на осях координат (Рис. 5.3)
|
 R
R
 0 y
0 y
Точка Р(0,0,0) лежит на плоскости поэтому она обращает уравнение плоскости в тождество.
аналогично точка Q(0,b,0) лежит на плоскости, из этого следует
аналогично точка R(0,0,c) лежит на плоскости.
Подставляя найденные значения коэффициентов в уравнение плоскости получим:
так как по условию D не равно нулю, то полученное уравнение можно сократить на D.
Полученное уравнение называется уравнением плоскости в отрезках.
5.2 Угол между двумя плоскостями. Условие параллельности и перпендикулярности двух плоскостей. Расстояние от точки до плоскости.
Пусть уравнения двух плоскостей заданы в виде:
Угол между этими плоскостями равен углу между нормальными векторами этих плоскостей  и может быть найден из известного выражения :
и может быть найден из известного выражения :

Если две плоскости перпендикулярны, то угол между векторами  равен 90 0 отсюда следует условие перпендикулярности плоскостей.
равен 90 0 отсюда следует условие перпендикулярности плоскостей.

Если две плоскости параллельны, то нормальные векторы параллельны и условие параллельности двух плоскостей сводится к условию колинеарности векторов .
Пусть задана точка М1(х1,у1,z1) и плоскость Ах+Ву+Сz+D=0. Формула расстояния от точки М1 до заданной плоскости определяется формулой:
5.3 Виды уравнений прямой в пространстве.
5.3.1 Каноническое уравнение прямой в пространстве.
Пусть задана точка М0(x0,y0,z0) и вектор  , параллельный искомой прямой и называемой направляющим вектором прямой. (Рис. 5.4)
, параллельный искомой прямой и называемой направляющим вектором прямой. (Рис. 5.4)
z 
 |

 y
y
Рис. 5.4
На прямой возьмём произвольную точку М (x,y,z) и рассмотрим вектор . Вектор параллелен  . Из условия параллельности двух векторов следует:
. Из условия параллельности двух векторов следует:
Полученные уравнения называются каноническими уравнениями прямой в пространстве.
5.3.2 Параметрические уравнения прямой.
Приравнивая в канонических уравнениях прямой каждую из дробей некоторому параметру t:
Получим уравнения выражающие текущие координаты каждой точки прямой через параметр t.
таким образом параметрические уравнения прямой имеют вид:
5.3.3 Уравнения прямой проходящей через две заданные точки.
Уравнения плоскости: общее, через три точки, нормальное
Плоскость, общее уравнение плоскости
Чтобы получить общее уравнение плоскости, разберём плоскость, проходящую через заданную точку.
Пусть в пространстве есть три уже известные нам оси координат — Ox, Oy и Oz. Подержим лист бумаги так, чтобы он оставался плоским. Плоскостью будет сам лист и его продолжение во всех направлениях.
Пусть P произвольная плоскость в пространстве. Всякий перпендикулярный ей вектор называется вектором нормали к этой плоскости. Естественно, речь идёт о ненулевом векторе.

Если известна какая-нибудь точка  плоскости P и какой-нибудь вектор
плоскости P и какой-нибудь вектор  нормали к ней, то этими двумя условиями плоскость в пространстве вполне определена (через заданную точку можно провести единственную плоскость, перпендикулярную данному вектору). Общее уравнение плоскости будет иметь вид:
нормали к ней, то этими двумя условиями плоскость в пространстве вполне определена (через заданную точку можно провести единственную плоскость, перпендикулярную данному вектору). Общее уравнение плоскости будет иметь вид:

Итак, условия, которыми задаётся уравнение плоскости, есть. Чтобы получить само уравнение плоскости, имеющее приведённый выше вид, возьмём на плоскости P произвольную точку M с переменными координатами x, y, z. Эта точка принадлежит плоскости только в том случае, когда вектор  перпендикулярен вектору
перпендикулярен вектору  (рис. 1). Для этого, согласно условию перпендикулярности векторов, необходимо и достаточно, чтобы скалярное произведение этих векторов было равно нулю, то есть
(рис. 1). Для этого, согласно условию перпендикулярности векторов, необходимо и достаточно, чтобы скалярное произведение этих векторов было равно нулю, то есть
 .
.
Вектор задан по условию. Координаты вектора найдём по формуле  :
:
 .
.
Теперь, используя формулу скалярного произведения векторов  , выразим скалярное произведение в координатной форме:
, выразим скалярное произведение в координатной форме:
 . (1)
. (1)
Так как точка M(x; y; z) выбрана на плоскости произвольно, то последнему уравнению удовлетворяют координаты любой точки, лежащей на плоскости P. Для точки N, не лежащей на заданной плоскости,  , т.е. равенство (1) нарушается.
, т.е. равенство (1) нарушается.
Перед решением задач может пригодиться урок о декартовой системе координат. Также хорошо бы владеть материалом о скалярном произведении векторов.
Пример 1. Составить уравнение плоскости, проходящей через точку  и перпендикулярной вектору
и перпендикулярной вектору  .
.
Решение. Используем формулу (1), еще раз посмотрим на неё:
.
В этой формуле числа A , B и C координаты вектора , а числа x 0 , y 0 и z 0 — координаты точки .
Вычисления очень простые: подставляем эти числа в формулу и получаем
 .
.
Умножаем всё, что нужно умножить и складываем просто числа (которые без букв). Результат:
 .
.
Требуемое уравнение плоскости в этом примере оказалось выражено общим уравнением первой степени относительно переменных координат x, y, z произвольной точки плоскости.
Итак, уравнение вида
 (2)
(2)
называется общим уравнением плоскости.
Пример 2. Построить в прямоугольной декартовой системе координат плоскость, заданную уравнением  .
.
Решение. Для построения плоскости необходимо и достаточно знать какие-либо три её точки, не лежащие на одной прямой, например, точки пересечения плоскости с осями координат.
Как найти эти точки? Чтобы найти точку пересечения с осью Oz , нужно в уравнение, данное в условии задачи, вместо икс и игрека подставить нули: x = y = 0 . Поэтому получаем z = 6 . Таким образом, заданная плоскость пересекает ось Oz в точке A(0; 0; 6) .
Точно так же находим точку пересечения плоскости с осью Oy . При x = z = 0 получаем y = −3 , то есть точку B(0; −3; 0) .
И, наконец, находим точку пересечения нашей плоскости с осью Ox . При y = z = 0 получим x = 2 , то есть точку C(2; 0; 0) . По трём полученным в нашем решении точкам A(0; 0; 6) , B(0; −3; 0) и C(2; 0; 0) строим заданную плоскость.
Рассмотрим теперь частные случаи общего уравнения плоскости. Это случаи, когда те или иные коэффициенты уравнения (2) обращаются в нуль.
1. При D = 0 уравнение  определяет плоскость, проходящую через начало координат, так как координаты точки 0(0; 0; 0) удовлетворяют этому уравнению.
определяет плоскость, проходящую через начало координат, так как координаты точки 0(0; 0; 0) удовлетворяют этому уравнению.
2. При A = 0 уравнение  определяет плоскость, параллельную оси Ox, поскольку вектор нормали
определяет плоскость, параллельную оси Ox, поскольку вектор нормали  этой плоскости перпендикулярен оси Ox (его проекция на ось Ox равна нулю). Аналогично, при B = 0 плоскость
этой плоскости перпендикулярен оси Ox (его проекция на ось Ox равна нулю). Аналогично, при B = 0 плоскость  параллельная оси Oy, а при C = 0 плоскость
параллельная оси Oy, а при C = 0 плоскость  параллельна оси Oz.
параллельна оси Oz.
3. При A = D = 0 уравнение  определяет плоскость, проходящую через ось Ox, поскольку она параллельна оси Ox (A = 0) и проходит через начало координат (D = 0). Аналогично, плоскость
определяет плоскость, проходящую через ось Ox, поскольку она параллельна оси Ox (A = 0) и проходит через начало координат (D = 0). Аналогично, плоскость  проходит через ось Oy, а плоскость
проходит через ось Oy, а плоскость  через ось Oz.
через ось Oz.
4. При A = B = 0 уравнение  определяет плоскость, параллельную координатной плоскости xOy, поскольку она параллельна осям Ox (A = 0) и Oy (B = 0). Аналогично, плоскость
определяет плоскость, параллельную координатной плоскости xOy, поскольку она параллельна осям Ox (A = 0) и Oy (B = 0). Аналогично, плоскость  параллельна плоскости yOz, а плоскость
параллельна плоскости yOz, а плоскость  — плоскости xOz.
— плоскости xOz.
5. При A = B = D = 0 уравнение  (или z = 0) определяет координатную плоскость xOy, так как она параллельна плоскости xOy (A = B = 0) и проходит через начало координат (D = 0). Аналогично, уравнение y = 0 в пространстве определяет координатную плоскость xOz, а уравнение x = 0 — координатную плоскость yOz.
(или z = 0) определяет координатную плоскость xOy, так как она параллельна плоскости xOy (A = B = 0) и проходит через начало координат (D = 0). Аналогично, уравнение y = 0 в пространстве определяет координатную плоскость xOz, а уравнение x = 0 — координатную плоскость yOz.
Пример 3. Составить уравнение плоскости P , проходящей через ось Oy и точку  .
.
Решение. Итак, плоскость проходит через ось Oy . Поэтому в её уравнении y = 0 и это уравнение имеет вид  . Для определения коэффициентов A и C воспользуемся тем, что точка принадлежит плоскости P .
. Для определения коэффициентов A и C воспользуемся тем, что точка принадлежит плоскости P .
Поэтому среди её координат есть такие, которые можно подставить в уравнению плоскости, которое мы уже вывели (). Смотрим ещё раз на координаты точки:
Среди них x = 2 , z = 3 . Подставляем их в уравнение общего вида и получаем уравнение для нашего частного случая:
Оставляем 2A в левой части уравнения, переносим 3C в правую часть и получаем
Подставив найденное значение A в уравнение  , получим
, получим
 или
или  .
.
Это и есть уравнение, требуемое в условии примера.
Решить задачу на уравнения плоскости самостоятельно, а затем посмотреть решение
Пример 4. Определить плоскость (или плоскости, если больше одной) относительно координатных осей или координатных плоскостей, если плоскость (плоскости) задана уравнением  .
.
Уравнение плоскости, проходящей через три точки
Как уже упоминалось, необходимым и достаточным условием для построения плоскости, кроме одной точки и вектора нормали, являются также три точки, не лежащие на одной прямой.
Пусть даны три различные точки  ,
,  и
и  , не лежащие на одной прямой. Так как указанные три точки не лежат на одной прямой, векторы
, не лежащие на одной прямой. Так как указанные три точки не лежат на одной прямой, векторы  и
и  не коллинеарны, а поэтому любая точка плоскости
не коллинеарны, а поэтому любая точка плоскости  лежит в одной плоскости с точками
лежит в одной плоскости с точками  ,
,  и
и  тогда и только тогда, когда векторы
тогда и только тогда, когда векторы  ,
,  и
и  компланарны, т.е. тогда и только тогда, когда смешанное произведение этих векторов равно нулю.
компланарны, т.е. тогда и только тогда, когда смешанное произведение этих векторов равно нулю.
Используя выражение смешанного произведения в координатах, получим уравнение плоскости
 (3)
(3)
После раскрытия определителя это уравнение становится уравнением вида (2), т.е. общим уравнением плоскости.
Пример 5. Составить уравнение плоскости, проходящей через три данные точки, не лежащие на одной прямой:
 ,
,  ,
, 
и определить частный случай общего уравнения прямой, если такой имеет место.
Решение. По формуле (3) имеем:


Получили общее уравнение плоскости
 или после деления на -2:
или после деления на -2:
 .
.
Это уравнение, в котором A = 0, т.е. оно определяет плоскость, параллельную оси Ox.
Нормальное уравнение плоскости. Расстояние от точки до плоскости
Нормальным уравнением плоскости называется её уравнение, записанное в виде
 ,
,
где  — направляющие косинусы нормали плоскости,
— направляющие косинусы нормали плоскости,  — расстояние от начала координат до плоскости.
— расстояние от начала координат до плоскости.
Нормалью к плоскости называется вектор, направление которого совпадает с направлением прямой, проведённой через начало координат перпендикулярно данной плоскости. (Есть полная аналогия с нормалью к прямой на плоскости, с той лишь разницей, что нормальное уравнение прямой существует в двух измерениях, а нормальное уравнение плоскости — в трёх).
Пусть M — какая угодно точка пространства. Для нахождения отклонения  точки M от плоскости следует в левую часть нормального уравнения плоскости подставить на место x, y и z подставить координаты
точки M от плоскости следует в левую часть нормального уравнения плоскости подставить на место x, y и z подставить координаты  этой точки.
этой точки.
Это правило позволяет найти и расстояние от точки M до плоскости: расстояние равно модулю отклонения, т.е.
 ,
,
так как расстояние не может быть отрицательным числом.
Общее уравнение плоскости

приводится к нормальному виду почленным умножением на нормирующий множитель, определяемый формулой
 .
.
Знак нормирующего множителя берётся противоположным знаку свободного члена в общем уравнении плоскости.
Пример 6. Привести уравнение плоскости  к нормальному виду.
к нормальному виду.
Решение. Вычислим нормирующий множитель:
 .
.
Знак нормирующего множителя положительный, то есть, противоположен знаку свободного члена в общем уравнении плоскости. Умножим общее уравнение почленно на нормирующий множитель и получим требуемое в условии примера нормальное уравнение плоскости:
 .
.
Пример 7. Вычислить величину отклонения и расстояния от точки до прямой, если точка задана координатами (-2; -4; 3) , а плоскость задана общим уравнением  .
.
Решение. Сначала приведём уравнение плоскости к нормальному виду. Вычислим нормирующий множитель:
 .
.
Знак нормирующего множителя отрицательный, то есть, противоположен знаку свободного члена в общем уравнении плоскости. Умножим общее уравнение почленно на нормирующий множитель и получим нормальное уравнение плоскости:
 .
.
Вычислим отклонение точки от плоскости:

Найдём теперь расстояние от точки до плоскости как модуль отклонения:
http://vunivere.ru/work70881
http://function-x.ru/equations_of_plane.html