Тесты по основам технической механики
тест по теме

Тесты по основам технической механики для НПО.
Скачать:
| Вложение | Размер |
|---|---|
| testy_po_osnovam_tekhnicheskoy_mekhaniki.docx | 64.54 КБ |
Предварительный просмотр:
Тесты по основам технической механики
1. Что изучает статика ?
1) статика изучает силы, их действия, сложение, разложение и равновесие их.
2) статика изучает статистические движения тел
3) статика изучает механическое движение тел
2. На какие разделы делится теоретическая механика?
1) статика, кибернетика, механика.
2) статика, кинематика, динамика.
3) кинематика, механика, кибернетика.
3. Когда расстояние между двумя точками тела остается неизменным его называют
1) абсолютно твердым телом
2) прочным телом
4. Векторная величина, представляющая собой меру механического воздействия одних тел на другие – это
5. Материальной точкой называется
1) абсолютно твердое тело, размерами которого можно пренебречь, сосредоточив всю массу тела в точке.
2) точка, сосредоточенная в центре тела
6.Дествия системы сил на одно и то же твердое тело, производя одинаковые воздействия
7.Если система сил эквивалентна одной силе, то эта сила называется
8. На чем базируются все теоремы и уравнения статики?
1) на законах статики
2) на наблюдениях
9. Что называется изгибом?
1) Это такой вид деформации, при котором возникают только касательные напряжения
2) Это такой вид деформации, при котором в поперечном сечении бруса возникают изгибающие моменты
3) Это такой вид деформации, при котором возникают поперечные силы
4) Это такой вид деформации, при котором возникают продольные силы
10 . Как называется брус, работающий на изгиб?
1) массив; 3) балка;
2) консоль; 4) опора.
11. Назовите единицу измерения силы?
1) Паскаль. 3) Ньютон.
2) Герц. 4) Джоуль
12. Какой прибор служит для статистического измерения силы?
1) амперметр; 3) гироскоп;
2) динамометр; 4) силомер;
13. Что называется моментом силы относительно точки (центра)?
1) Произведение модуля этой силы на время её действия.
2) Отношение силы, действующей на тело, к промежутку времени, в течение которого эта сила действует.
3) Произведение силы на квадрат расстояния до точки (центра).
4) Произведение силы на кратчайшее расстояние до этой точки (центра).
14. Когда момент силы считается положительным?
1) Когда под действием силы тело движется вперёд.
2) Когда под действием силы тело вращается по ходу часовой стрелки.
3) Когда под действием силы тело движется назад.
4) Когда под действием силы тело вращается против хода часовой стрелки
15. Трением скольжения называют:
1)сопротивление, возникающие при относительном перемещение одного тела по поверхности другого
2)сопротивление силе обратной коэффициенту трения.
16. Сила трения направлена в сторону, противоположную относительной скорости скольжения
1) это закон Кулона;
2) это свойство пары сил;
3)это закон статики.
17. Раздел механики, в котором изучается движение материальных тел под действием приложенных к ним сил – это
18. Основной закон динамики
1) устанавливает связь между ускорением и массой материальной точки и силой
2) Масса является мерой инертности материальных тел в их поступательном движении
3)Всякому действию соответствует равное и противоположно направленное противодействие
19. Тело массой 5 кг движется по горизонтальной прямой. Сила трения равна 6 Н. Чему равен коэффициент трения?
20.Единицы измерения работы в Международной системе единиц (СИ) – это
21.отношение полезной работы к полной затраченной работе – это
3)первый закон динамики
22. Прочность это:
1) способность конструкции выдерживать заданную нагрузку не разрушаясь и без появления остаточных деформаций.
2) способность конструкции сопротивляться упругим деформациям.
3) способность конструкции сохранять первоначальную форму упругого равновесия.
4) способность конструкции не накапливать остаточные деформации.
23. Как называется график зависимости между растягивающей силой и соответствующим удлинением образца материала?
1) Спектрограмма 3) Голограмма
2) Томограмма 4) Диаграмма
24. Пластичность – это
1) Способность материала, не разрушаясь, воспринимать внешние механические воздействия.
2) Способность материала давать значительные остаточные деформации, не разрушаясь.
3) Способность материала восстанавливать после снятия нагрузки свои первоначальные формы и размеры.
4) Способность материала сопротивляться проникновению в него другого тела практически не получающего остаточных деформаций
25.Какой инструмент применяется для плоскостной разметки металла?
26. Какой инструмент применяется при резке металла?
3). Ножовка по металлу
27. Каким инструментом режут тонкий листовой металл?
28. Какие слесарные операции выполняют при резке металла?
29. Как удаляют опилки со слесарного станка?
30. При опиливании металла не используют…
31 . Какой угол заточки должен быть у зубила для рубки нелегированной стали?
32 . Какие работы выполняют крейцмейселем?
2). Выполняют углубление перед сверлением
3). Вырубают узкие канавки
33. Каким инструментом делаем углубление в центре отверстия перед сверлением?
34. Какие слесарные операции можно выполнять на сверлильном станке?
1) Нарезание резьбы
4) Все перечисленные операции
35. В чем зажимают сверло чтобы запустить дрель в работу?
36. Рубку металла выполняют.
37.Детали машин и узлы бывают:
1 )общего назначения;
2) специального назначения;
3)общего и специального назначения ;
4) двигательного и передаточного назначения.
38. Две подвижно — соединительные детали образуют
3) кинематическую пару
39.Совокупность звеньев подвижно кинематических пар образуют
1) кинематическую цепь
2) исполнительный механизм
40. К неразъемным соединениям относятся
2) клепаные, клееные
3) штифтовые, шпилечные.
4) сварные, клепаные, клееные.
41. Что называют рубкой металла?
1)обработка металла ударным и режущим инструментом;
2) обработка металла ударным инструментом;
3) обработка металла режущим инструментом.
42. От чего зависит угол заострения режущей кромки зубила?
1) от твердости обрабатываемого металла ;
2) от ширины зубила;
3) от длины зубила.
43. Из какого металла изготавливают зубила?
3) из инструментальной углеродистой стали.
44. Как называется специальное зубило для прорубания канавок?
45. Что изучает кинематика?
1) Движение тела под действием приложенных к нему сил.
2) Виды равновесия тела.
3) Движение тела без учета действующих на него сил.
4) Способы взаимодействия тел между собой.
46. При расчете заклепочных соединений на смятие учитывается:
1) наименьшая толщина склепываемых элементов
2) наибольшая толщина склепываемых элементов
3) толщина всех склепываемых деталей
4) диаметр заклепки
47. Твердость – это
1) Способность материала, не разрушаясь, воспринимать внешние механические воздействия.
2) Способность материала давать значительные остаточные деформации, не разрушаясь.
3) Способность материала сопротивляться проникновению в него другого тела практически не получающего остаточных деформаций.
48. Для преобразования вращательного движения в поступательное применяется
1) червячная передача
2) реечная передача
49. для передачи вращения между удаленными друг от друга валами применяется
2) ременная передача
3) Червячная передача
50.Что означает это условное изображение
1) зубчатая передача 2) червячная передача
1Для разметки стальной поверхности нанесения линий (рисок) применяют:
4) шариковую ручку
1)инструмент для разметки
3 ) углубление от разметочного инструмента
4) брак при разметке
3. На алюминий разметку наносят:
4) шариковой ручкой
4. Инструментом для рубки металла является:
5. Угол заточки зубила для твердых металлов равен:
6. Указать неверный ответ
При рубке металла используют следующие удары:
7. Назовите виды зенкеров:
1) остроносые и тупоносые
2) машинные и ручные
3) по камню и по бетону
4)цельные и насадные
8. Что такое развёртывание:
1) это операция по обработке резьбового отверстия
2) это операция по обработке раннее просверленного отверстия с высокой степенью
точности
3) это операция по обработке квадратного отверстия с высокой степенью точности
4) это операция по обработке конического отверстия с высокой степенью точности
9. Назовите виды разверток по способу использования :
1) основные и вспомогательные
2) ручные и машинные
3) станочные и слесарные
4) прямые и конические
10. Назовите виды разверток по форме рабочей части:
1) цилиндрические и конические
2) ромбические и полукруглые
3)четырёхгранные и трехгранные
4) прямые и конические
11. Назовите виды разверток по точности обработки:
1) цилиндрические и конические
2) черновые и чистовые
3) качественные и некачественные
4) ручные и машинные
12. Назовите профили резьбы:
1)треугольная, прямоугольная, трапецеидальная, упорная, круглая
2)овальная, параболическая, трёхмерная, в нахлестку, зубчатая
3) полукруглая, врезная, сверхпрочная, антифрикционная
4) модульная, сегментная, трубчатая, потайная
13. Назовите системы резьбы:
1) Сантиметровая, футовая, батарейная
2) Газовая, дециметровая, калиброванная
3)Метрическая, дюймовая, трубная
4) Миллиметровая, водопроводная, газовая
14. Назовите элементы резьбы:
1) Профиль зуба, наружный угол, средний угол, внутренний угол
2) Угол профиля, шаг резьбы, наружный диаметр, диаметр, внутренний диаметр
3) Зуб, модуль, наружный радиус, средний радиус, внутренний радиус
4)Шаг зуба, угол модуля, наружный профиль, средний профиль, внутренний профиль
15. Какие слесарные операции можно выполнять на сверлильном станке?
1) Нарезание резьбы
4) Все перечисленные операции
16. В чем зажимают сверло чтобы запустить дрель в работу?
17. Рубку металла выполняют.
18.Детали машин и узлы бывают:
1 )общего назначения;
2) специального назначения;
3)общего и специального назначения ;
4) двигательного и передаточного назначения.
19. Две подвижно — соединительные детали образуют
3) кинематическую пару
20.Совокупность звеньев подвижно кинематических пар образуют
1) кинематическую цепь
2) исполнительный механизм
21. К неразъемным соединениям относятся
2) клепаные, клееные
3) штифтовые, шпилечные.
4) сварные, клепаные, клееные.
22. Что называют рубкой металла?
1)обработка металла ударным и режущим инструментом;
2) обработка металла ударным инструментом;
3) обработка металла режущим инструментом.
23. От чего зависит угол заострения режущей кромки зубила?
1) от твердости обрабатываемого металла ;
2) от ширины зубила;
3) от длины зубила.
24. Из какого металла изготавливают зубила?
3) из инструментальной углеродистой стали.
25. Как называется специальное зубило для прорубания канавок?
26. Что изучает кинематика?
1) Движение тела под действием приложенных к нему сил.
2) Виды равновесия тела.
3) Движение тела без учета действующих на него сил.
4) Способы взаимодействия тел между собой.
27. При расчете заклепочных соединений на смятие учитывается:
1) наименьшая толщина склепываемых элементов
2) наибольшая толщина склепываемых элементов
3) толщина всех склепываемых деталей
4) диаметр заклепки
28. Твердость – это
1) Способность материала, не разрушаясь, воспринимать внешние механические воздействия.
2) Способность материала давать значительные остаточные деформации, не разрушаясь.
3) Способность материала сопротивляться проникновению в него другого тела практически не получающего остаточных деформаций.
29. Для преобразования вращательного движения в поступательное применяется
1) червячная передача
2) реечная передача
30. для передачи вращения между удаленными друг от друга валами применяется
2) ременная передача
3) Червячная передача
31.Что означает это условное изображение
1) зубчатая передача 2) червячная передача
32. Что изучает статика ?
1) статика изучает силы, их действия, сложение, разложение и равновесие их.
2) статика изучает статистические движения тел
3) статика изучает механическое движение тел33
33. На какие разделы делится теоретическая механика?
1) статика, кибернетика, механика.
2) статика, кинематика, динамика.
3) кинематика, механика, кибернетика.
34. Когда расстояние между двумя точками тела остается неизменным его называют
1) абсолютно твердым телом
2) прочным телом
35. Векторная величина, представляющая собой меру механического воздействия одних тел на другие – это
36. Материальной точкой называется
1) абсолютно твердое тело, размерами которого можно пренебречь, сосредоточив всю массу тела в точке.
2) точка, сосредоточенная в центре тела37
37.Дествия системы сил на одно и то же твердое тело, производя одинаковые воздействия
38.Если система сил эквивалентна одной силе, то эта сила называется
39. На чем базируются все теоремы и уравнения статики?
1) на законах статики
2) на наблюдениях
40. Что называется изгибом?
1) Это такой вид деформации, при котором возникают только касательные напряжения
2) Это такой вид деформации, при котором в поперечном сечении бруса возникают изгибающие моменты
3) Это такой вид деформации, при котором возникают поперечные силы
4) Это такой вид деформации, при котором возникают продольные силы
41 . Как называется брус, работающий на изгиб?
1) массив; 3) балка;
2) консоль; 4) опора.
42. Назовите единицу измерения силы?
1) Паскаль. 3) Ньютон.
2) Герц. 4) Джоуль
43. Какой прибор служит для статистического измерения силы?
1) амперметр; 3) гироскоп;
2) динамометр; 4) силомер;
44. Что называется моментом силы относительно точки (центра)?
1) Произведение модуля этой силы на время её действия.
2) Отношение силы, действующей на тело, к промежутку времени, в течение которого эта сила действует.
3) Произведение силы на квадрат расстояния до точки (центра).
4) Произведение силы на кратчайшее расстояние до этой точки (центра).
45. Когда момент силы считается положительным?
1) Когда под действием силы тело движется вперёд.
2) Когда под действием силы тело вращается по ходу часовой стрелки.
3) Когда под действием силы тело движется назад.
4) Когда под действием силы тело вращается против хода часовой стрелки
46. Трением скольжения называют:
1)сопротивление, возникающие при относительном перемещение одного тела по поверхности другого
2)сопротивление силе обратной коэффициенту трения.
47. Сила трения направлена в сторону, противоположную относительной скорости скольжения
1) это закон Кулона;
2) это свойство пары сил;
3)это закон статики.
48. Раздел механики, в котором изучается движение материальных тел под действием приложенных к ним сил – это
49. Основной закон динамики
1) устанавливает связь между ускорением и массой материальной точки и силой
2) Масса является мерой инертности материальных тел в их поступательном движении
3)Всякому действию соответствует равное и противоположно направленное противодействие
50. Тело массой 5 кг движется по горизонтальной прямой. Сила трения равна 6 Н. Чему равен коэффициент трения?
1.Единицы измерения работы в Международной системе единиц (СИ) – это
2.отношение полезной работы к полной затраченной работе – это
3)первый закон динамики
3. Прочность это:
1) способность конструкции выдерживать заданную нагрузку не разрушаясь и без появления остаточных деформаций.
2) способность конструкции сопротивляться упругим деформациям.
3) способность конструкции сохранять первоначальную форму упругого равновесия.
4) способность конструкции не накапливать остаточные деформации.
4. Как называется график зависимости между растягивающей силой и соответствующим удлинением образца материала?
1) Спектрограмма 3) Голограмма
2) Томограмма 4) Диаграмма
5. Пластичность – это
1)Способность материала, не разрушаясь, воспринимать внешние механические воздействия.
2) Способность материала давать значительные остаточные деформации, не разрушаясь.
3) Способность материала восстанавливать после снятия нагрузки свои первоначальные формы и размеры.
4) Способность материала сопротивляться проникновению в него другого тела практически не получающего остаточных деформаций
1) снятие небольших слоев металла напильником
2) Опиливание от заготовки частей металла
3) специальная обработка пилой
7. Как удаляют опилки со слесарного станка?
8. Указать неверный ответ
При рубке металла используют следующие удары:
9. Что называется изгибом?
1) Это такой вид деформации, при котором возникают только касательные напряжения
2) Это такой вид деформации, при котором в поперечном сечении бруса возникают изгибающие моменты
3) Это такой вид деформации, при котором возникают поперечные силы
4) Это такой вид деформации, при котором возникают продольные силы
10 . Как называется брус, работающий на изгиб?
1) массив; 3) балка;
2) консоль; 4) опора.
11. Назовите единицу измерения силы?
1) Паскаль. 3) Ньютон.
2) Герц. 4) Джоуль
12. Какой прибор служит для статистического измерения силы?
1) амперметр; 3) гироскоп;
2) динамометр; 4) силомер;
13. Что называется моментом силы относительно точки (центра)?
1) Произведение модуля этой силы на время её действия.
2) Отношение силы, действующей на тело, к промежутку времени, в течение которого эта сила действует.
3) Произведение силы на квадрат расстояния до точки (центра).
4) Произведение силы на кратчайшее расстояние до этой точки (центра).
14. Когда момент силы считается положительным?
1) Когда под действием силы тело движется вперёд.
2) Когда под действием силы тело вращается по ходу часовой стрелки.
3) Когда под действием силы тело движется назад.
4) Когда под действием силы тело вращается против хода часовой стрелки
15. Трением скольжения называют:
1)сопротивление, возникающие при относительном перемещение одного тела по поверхности другого
2)сопротивление силе обратной коэффициенту трения.
16. Сила трения направлена в сторону, противоположную относительной скорости скольжения
1) это закон Кулона;
2) это свойство пары сил;
3)это закон статики.
17. Раздел механики, в котором изучается движение материальных тел под действием приложенных к ним сил – это
18. Основной закон динамики
1) устанавливает связь между ускорением и массой материальной точки и силой
2) Масса является мерой инертности материальных тел в их поступательном движении
3)Всякому действию соответствует равное и противоположно направленное противодействие
19. Тело массой 5 кг движется по горизонтальной прямой. Сила трения равна 6 Н. Чему равен коэффициент трения?
20.Что такое разметка:
1) операция по нанесению линий и точек на заготовку, предназначенную для обработки
2) операция по снятию с заготовки слоя металла
3) операция по нанесению на деталь защитного слоя
; операция по удалению с детали заусенцев
21. Назвать виды разметки:
1) существует два вида: прямая и угловая
2) существует два вида: плоскостная и пространственная
3) существует один вид: базовая
4) существует три вида: круговая, квадратная и параллельная
22. Назвать инструмент, применяемый при разметке:
1) напильник, надфиль, рашпиль
2) сверло, зенкер, зенковка, цековка
3) труборез, слесарная ножовка, ножницы
4) чертилка, молоток, прямоугольник, кернер, разметочный циркуль
23. назвать мерительные инструменты применяемый для разметки:
1) масштабная линейка, штангенциркуль, угольник, штангенрейсмус
2)микрометр, индикатор, резьбовой шаблон, щуп
3) чертилка, молоток, прямоугольник, кернер, разметочный циркуль
4)киянка, гладилка, кувалда, молоток с круглым бойком
24. Выбрать правильный ответ
Что такое накернивание:
1) это операция по нанесению точек-углублений на поверхности детали
2) это операция по удалению заусенцев с поверхности детали
3) это операция по распиливанию квадратного отверстия
4)это операция по выпрямлению покоробленного металла
25. Инструмент, применяемый при рубке металла:
1) применяется: метчик, плашка, клупп
2) применяется: кернер, шабер, зенкер, киянка, гладилка
3) применяется: слесарное зубило, крейцмейсель, канавочник, молоток
26. Что такое правка металла:
1) операция по выправлению изогнутого или покоробленного металла, подвергаются только пластичные материалы
2)операция по образованию цилиндрического отверстия в сплошном материале
3) операция по образованию резьбовой поверхности на стержне
4) операция по удалению слоя металла с заготовки с целью придания нужной формы и размеров
27. Выбрать правильный ответ
Назовите инструменты и приспособления, применяемые при правке :
1) применяется: параллельные тиски, стуловые тиски, струбцины
2) применяется: натяжка, обжимка, поддержка, чекан
3) применяется: правильная плита, рихтовальная бабка, киянка, молоток, гладилка
4)применяется: кернер, шабер, зенкер, киянка, гладилка
28. Что такое резка металла:
1) это операция, связанная с разделением материалов на части с помощью режущего инструмента
2) это операция, нанесению разметочных линий на поверхность заготовки
3) это операция, по образованию резьбовой поверхности внутри отверстия
4) это операция, по образованию резьбы на поверхности металлического стержня
29. Назовите ручной инструмент для резке металла:
1)Зубило, крейцмейсель, канавочник
2) Слесарная ножовка, ручные ножницы, труборез
3) Гладилка, киянка, кувалда,
4) Развертка, цековка, зенковка
30. Трением скольжения называют:
1)сопротивление, возникающие при относительном перемещение одного тела по поверхности другого
2)сопротивление силе обратной коэффициенту трения.
31. Для преобразования вращательного движения в поступательное применяется
1) червячная передача
2) реечная передача
32. Прочность это:
1) способность конструкции выдерживать заданную нагрузку не разрушаясь и без появления остаточных деформаций.
2) способность конструкции сопротивляться упругим деформациям.
3) способность конструкции сохранять первоначальную форму упругого равновесия.
4) способность конструкции не накапливать остаточные деформации.
33. Как называется график зависимости между растягивающей силой и соответствующим удлинением образца материала?
1) Спектрограмма 3) Голограмма
2) Томограмма 4) Диаграмма
34. Пластичность – это
1) Способность материала, не разрушаясь, воспринимать внешние механические воздействия.
2) Способность материала давать значительные остаточные деформации, не разрушаясь.
3) Способность материала восстанавливать после снятия нагрузки свои первоначальные формы и размеры.
4 ) Способность материала сопротивляться проникновению в него другого тела практически не получающего остаточных деформаций
35.Какой инструмент применяется для плоскостной разметки металла?
36. Какой инструмент применяется при резке металла?
3). Ножовка по металлу
37. Каким инструментом режут тонкий листовой металл?
38. Какие слесарные операции выполняют при резке металла?
39. Как удаляют опилки со слесарного станка?
40. При опиливании металла не используют…
41 . Какой угол заточки должен быть у зубила для рубки нелегированной стали?
42 . Какие работы выполняют крейцмейселем?
2). Выполняют углубление перед сверлением
3). Вырубают узкие канавки
43. Каким инструментом делаем углубление в центре отверстия перед сверлением?
. 44.Что называется силой?
1) Давление одного тела на другое.
2) Мера воздействия одного тела на другое.
3) Величина взаимодействия между телами.
4) Мера взаимосвязи между телами (объектами).
45 . Какая система сил называется уравновешенной?
1) Две силы, направленные по одной прямой в разные стороны.
2) Две силы, направленные под углом 90 о друг к другу.
3) Несколько сил, сумма которых равна нулю.
4) Система сил, под действием которых свободное тело может находится в покое.
46. Назовите виды сверлильных станков:
1) Подвесные, напольные и диагональные
2) Настольные, вертикальные и радиальные
3) Винторезные, расточные и долбёжные
4) Ручные, машинные и станочные
47. Что изучает статика ?
1) статика изучает силы, их действия, сложение, разложение и равновесие их.
2) статика изучает статистические движения тел
3) статика изучает механическое движение тел
48. На какие разделы делится теоретическая механика?
1) статика, кибернетика, механика.
2) статика, кинематика, динамика.
3) кинематика, механика, кибернетика.
49. Когда расстояние между двумя точками тела остается неизменным его называют
1) абсолютно твердым телом
2) прочным телом
50. Векторная величина, представляющая собой меру механического воздействия одних тел на другие – это
Аксиомы и теоремы статики в теоретической механике
Содержание:
В статике твердого тела рассматриваются свойства сил, приложенных к твердому телу. В частности, изучается приведение сложных систем сил к более простому виду и устанавливаются условия равновесия различных систем сил, действующих на твердое тело или материальную точку.
Теоретическая механика, как и всякая другая наука, имеет свои понятия и определения, которые используются для формулирования ее аксиом и теорем. Статика базируется на аксиомах, из которых по законам логики, вводя новые понятия, получают все необходимые следствия в удобной для применения форме.
Основные понятия и определения аксиом
Материальной точкой называют простейшую модель материального тела любой формы, размеры которого достаточно малы и которое можно принять за геометрическую точку, имеющую определенную массу.
Механической системой называется любая совокупность материальных точек.
Абсолютно твердым телом (или неизменяемой механической системой) называют механическую систему, расстояния между точками которой не изменяются при любых взаимодействиях. Все тела в природе в той или иной мере деформируемы, но в некоторых задачах деформациями тел можно пренебречь, считая тела твердыми. При рассмотрении движения Земли вокруг Солнца ее можно считать абсолютно твердым телом и даже материальной точкой, хотя в действительности она не твердая, так как на ней есть океаны, воздушная оболочка и т. д. В дальнейшем абсолютно твердое тело будем называть просто твердым телом.
Понятие силы в теоретической механике является основным, первичным понятием. Силой называют одну из векторных мер действия одного материального объекта на другой рассматриваемый объект. Имеются разные меры действия: скалярные и векторные. Обычно за эталон числового значения силы принимают значение линейной силы упругости, например пружинного динамометра, которая пропорциональна его деформации. Числовые значения сил различной природы определяют путем сравнения со значением линейной силы упругости.
Сила кроме числового значения характеризуется точкой приложения и направлением действия. Она является векторной величиной. Механическое действие материальных тел друг на друга осуществляется при их соприкосновении (давление стула на пол в местах соприкосновения его ножек с полом) или как действие на расстоянии при посредстве силовых полей (притяжение Луны Землей и т. п.).
Силу как величину векторную обозначают какой-либо буквой со знаком вектора, например 
Системой сил называют совокупность сил, действующих на рассматриваемое тело или в более общем случае на точки механической системы. Можно рассматривать систему сил, приложенных к одной материальной точке.
Системой сил, эквивалентной нулю (или равновесной системой сил), называют такую систему сил, действие которой на твердое тело или материальную точку, находящиеся в покое или движущиеся по инерции, не приводит к изменению состояния покоя или движения по инерции этого тела или материальной точки.
Две системы сил называются эквивалентными, если их действие по отдельности на одно и то же твердое тело или материальную точку одинаково при прочих равных условиях, т. е. если одна система сил приводит твердое тело или материальную точку в какое-то движение, например из состояния покоя, то другая система сил, эквивалентная первой, сообщит такое же движение. Движения, вызванные действием эквивалентных систем сил, имеют одинаковые характеристики для каждого момента времени. Условие эквивалентности двух систем сил  и
и  выражают в форме
выражают в форме

где  и
и  — число сил в системах.
— число сил в системах.
Равнодействующей силой рассматриваемой системы сил называют силу, действие которой на твердое тело или материальную точку эквивалентно действию этой системы сил. Равнодействующая сила обозначается  , и условие ее эквивалентности рассматриваемой системе сил
, и условие ее эквивалентности рассматриваемой системе сил  выражается в виде
выражается в виде

Равновесная система сил имеет равнодействующую, равную нулю.
Уравновешивающей силой заданной системы сил считается такая сила, добавление которой к заданной дает новую систему, эквивалентную нулю. Если  является уравновешивающей силой системы сил
является уравновешивающей силой системы сил  , то, согласно определению, она удовлетворяет условию
, то, согласно определению, она удовлетворяет условию

В дальнейшем убедимся, что не всякая система сил имеет равнодействующую и уравновешивающую силы. Есть системы сил, которые не находятся в равновесии и не эквивалентны одной силе.
Аксиомы статики
Справедливость аксиом механики проверяется на опыте как непосредственно, так и по тем следствиям, которые из них получают.
При формулировке аксиом предполагаем, что на твердое тело или материальную точку действуют силы, которые указаны в соответствующей аксиоме. Твердое тело или материальную точку в общем случае следует считать свободными, имеющими возможность совершать в рассматриваемый момент любые перемещения в пространстве.
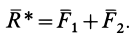
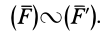
Аксиома о равновесии системы двух сил
Для равновесия системы двух сил, приложенных к точкам твердого тела, необходимо и достаточно, чтобы эти силы были равны по модулю и действовали вдоль одной прямой, проходящей через точки их приложения, в противоположных направлениях (рис. 1). Этой аксиомой устанавливается простейшая система сил, эквивалентная нулю. Если силы  и
и  находятся в равновесии, то, естественно, они образуют систему сил, эквивалентную нулю. Действие такой системы сил на покоящееся твердое тело не изменяет состояния покоя этого тела. Аксиома справедлива и для сил, приложенных к одной точке тела или одной материальной точке.
находятся в равновесии, то, естественно, они образуют систему сил, эквивалентную нулю. Действие такой системы сил на покоящееся твердое тело не изменяет состояния покоя этого тела. Аксиома справедлива и для сил, приложенных к одной точке тела или одной материальной точке.
Аксиома о добавлении (отбрасывании) системы сил, эквивалентной нулю
Если на твердое тело действует система сил, то к ней можно добавить (отбросить) систему сил, эквивалентную нулю. Полученная после добавления (отбрасывания) новая система сил является эквивалентной первоначальной системе сил. Под действием заданной системы сил и новой, полученной после добавления (отбрасывания) равновесной системы сил, тело будет двигаться (или находиться в покое) совершенно одинаково при прочих равных условиях. В частности, к любой системе сил можно добавить (отбросить) простейшую равновесную систему сил, состоящую из двух равных по модулю сил, действующих вдоль одной прямой в противоположных направлениях и приложенных в одной или разных точках твердого тела в соответствии с первой аксиомой.
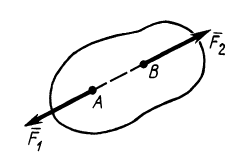
Рис. 1
Аксиома параллелограмма сил
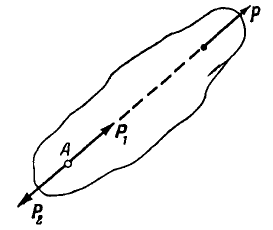
Две силы, действующие в одной точке твердого тела или на одну материальную точку, можно заменить одной равнодействующей силой, равной по модулю и направлению диагонали параллелограмма, построенного на заданных силах (рис. 2). Очевидно, справедливо и обратное. Одну силу, приняв за равнодействующую, можно разложить по правилу параллелограмма на две составляющие силы.
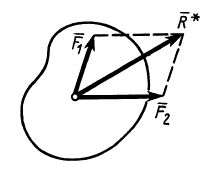
Рис. 2
Эту аксиому долгое время в истории развития механики пытались доказать и, следовательно, считали теоремой. Тщательный анализ таких доказательств, часто очень остроумных, показал, что для этого дополнительно используются положения, которые следует принимать за аксиомы.
Замену двух сил одной равнодействующей силой по правилу параллелограмма называют векторным сложением этих сил. Векторное сложение сил  и
и  математически выражают так:
математически выражают так:
Если силы и направлены по одной прямой в одну или противоположные стороны, то векторное сложение переходит в алгебраическое.
Модуль равнодействующей силы  как векторную сумму сил вычисляют по формуле диагонали параллелограмма
как векторную сумму сил вычисляют по формуле диагонали параллелограмма

Применяя теорему синусов к одному из треугольников параллелограмма, определяют синусы углов, которые образует равнодействующая r* с составляющими ее силами и :

Более предпочтительным способом определения числового значения и направления равнодействующей силы по отношению к каким-либо прямоугольным осям координат является метод проекций, который особенно удобен в случае векторного сложения более чем двух сил. Этот метод рассматривается дальше, при изучении систем сходящихся сил.
Аксиома о равенстве сил действия и противодействия
Аксиома о равенстве сил действия и противодействия — один из основных законов классической механики, сформулированных Ньютоном: всякой силе действия есть равная, но противоположная сила противодействия. По отношению к двум материальным точкам эта аксиома утверждает, что силы взаимодействия двух материальных точек равны по модулю, противоположны по направлению и действуют вдоль одной прямой, проходящей через взаимодействующие точки. Материальные точки при этом могут взаимодействовать как через посредство силовых полей, т. е. на расстоянии, так и путем соприкосновения друг с другом, если их считать твердыми телами очень малых размеров.
В статике эту аксиому применяют для твердых тел. Силы взаимодействия двух твердых тел (при взаимодействии путем соприкосновения или на расстоянии при посредстве силовых полей) равны по модулю и противоположны по направлению. Силы действия и противодействия всегда приложены к разным телам или к различным взаимодействующим точкам одного и того же тела.
Таким образом, в природе силы встречаются всегда по две: силы действия и противодействия.
Аксиома связей
Связью для твердого тела или материальной точки называют материальные объекты (тела и точки), которые ограничивают свободу перемещения рассматриваемого твердого тела или материальной точки. Аксиома связей утверждает, что всякую связь можно отбросить и заменить силой, реакцией связей (в простейшем случае) или системой сил (в общем случае). Эта аксиома фактически уже содержится в определении силы, но в истории развития механики это не было осознано сразу. Длительное время после формулировки Ньютона основных законов классической механики их применение к несвободным твердым телам и механическим системам встречалось с трудностями, пока не была дополнительно сформулирована аксиома связей. Учитывая большое значение аксиомы связей для дальнейшего изложения теоретической механики, оставим эту аксиому как самостоятельную.
Почти все теоремы и окончательные результаты теоретической механики формулируются для материальной точки или твердого тела, освобожденных от связей, т. е. когда связи заменены силами реакций связей. Поэтому очень важно уметь правильно заменять отброшенные связи силами реакций связей. Это одна из главных задач при изучении статики, которой следует уделить наибольшее внимание.
Силы реакций связей для рассматриваемого тела или точки зависят прежде всего от приложенных сил и от вида связей. При движении силы реакций связей зависят еще и от характеристик движения. Так, при движении тела в воздухе сила реакции воздуха на движущееся тело зависит от скорости движения тела относительно воздуха.
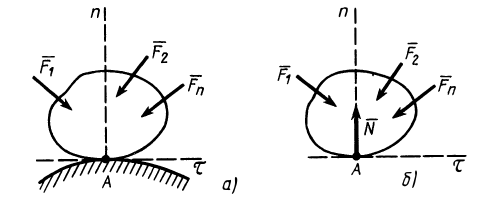
Рис. 3
Приведем примеры связей и их замены силами реакций связей. Если связью для твердого тела (рис. 3, а) является абсолютно гладкая поверхность другого тела, то сила реакции такой поверхности, если соприкосновение происходит в одной точке, направлена по нормали к общей касательной соприкасающихся поверхностей тел независимо от сил, приложенных к рассматриваемому телу (рис. 3, б). Сила реакции связи  направлена в сторону, противоположную направлению, в котором связь препятствует перемещению рассматриваемого тела. Числовое значение силы реакции при равновесии определяется приложенными к телу силами, которые в отличие от сил реакций связей часто называют активными силами.
направлена в сторону, противоположную направлению, в котором связь препятствует перемещению рассматриваемого тела. Числовое значение силы реакции при равновесии определяется приложенными к телу силами, которые в отличие от сил реакций связей часто называют активными силами.
Если соприкосновение происходит не в одной точке, а по некоторой площади поверхности, то реакция такой связи сводится к системе распределенных по поверхности сил, которые в некоторых случаях удается заменить одной равнодействующей силой реакции связи. В общем случае система распределенных сил может не иметь равнодействующей.
В тех случаях, когда сила реакции связей не только по модулю, но и по направлению зависит от приложенных сил, ее обычно раскладывают по правилу параллелограмма на составляющие параллельно осям координат. Через составляющие легко определяется как модуль силы реакции, так и ее направление.
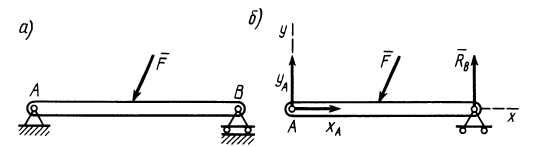
Рис. 4
Неизвестную по модулю и направлению силу реакции создают цилиндрический (плоский) и шаровой шарниры. Пусть имеем балку  , находящуюся в равновесии под действием силы
, находящуюся в равновесии под действием силы  и закрепленную на одном конце с помощью цилиндрического шарнира
и закрепленную на одном конце с помощью цилиндрического шарнира  , а на другом — катковой опоры
, а на другом — катковой опоры  (рис. 4. а). Цилиндрическим шарниром называют устройство, позволяющее балке поворачиваться в плоскости вокруг оси, перпендикулярной этой плоскости. Устройство катковой опоры ясно из рисунка. На рис. 4, б показана та же балка после освобождения от связей. Сила реакции катковой опоры направлена по нормали к общей касательной, если поверхности соприкосновения гладкие. Неизвестная по модулю и направлению реакция цилиндрического шарнира разложена на две составляющие
(рис. 4. а). Цилиндрическим шарниром называют устройство, позволяющее балке поворачиваться в плоскости вокруг оси, перпендикулярной этой плоскости. Устройство катковой опоры ясно из рисунка. На рис. 4, б показана та же балка после освобождения от связей. Сила реакции катковой опоры направлена по нормали к общей касательной, если поверхности соприкосновения гладкие. Неизвестная по модулю и направлению реакция цилиндрического шарнира разложена на две составляющие  и
и  , предположительно направленные в положительном направлении осей координат.
, предположительно направленные в положительном направлении осей координат.
В случае шарового шарнира силу реакции раскладывают на три составляющие, параллельные осям координат.
Гибкие связи (канаты, тросы, нити) дают силы реакции связей (силы натяжения), направленные по касательной к гибкой связи. На рис. 5, а, б сила натяжения нити заменяет действие нити на груз. На рис. 6, а, б показаны силы натяжения провода в сечениях  и
и  , действующих на часть провода
, действующих на часть провода  .
.
Рис. 5
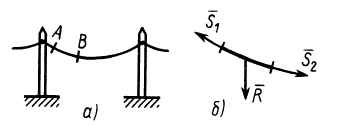
Рис. 6
На рис. 7, а, б показаны силы реакции цилиндрического шарнира  и стержня
и стержня  на балку . Стержень
на балку . Стержень  , имеющий на концах шарниры В и С, создает силу реакции на балку только в направлении самого стержня
, имеющий на концах шарниры В и С, создает силу реакции на балку только в направлении самого стержня  (шарнирный стержень), если на этот стержень не действуют другие силы между -его шарнирами
(шарнирный стержень), если на этот стержень не действуют другие силы между -его шарнирами  и
и  . Действительно, если рассмотреть находящийся в равновесии стержень
. Действительно, если рассмотреть находящийся в равновесии стержень  , то на него действуют только две силы в точках и
, то на него действуют только две силы в точках и  . Согласно первой аксиоме, эти силы должны быть направлены по одной прямой, проходящей через точки и
. Согласно первой аксиоме, эти силы должны быть направлены по одной прямой, проходящей через точки и  . Следовательно, сила реакции стержня
. Следовательно, сила реакции стержня  на балку направлена по
на балку направлена по  , так как действие балки на стержень дает силу, направленную по стержню.
, так как действие балки на стержень дает силу, направленную по стержню.
Рис. 7
Силы реакций других наиболее часто встречающихся связей рассматриваются в примерах.
Аксиома затвердевания
Если деформируемое тело находится в равновесии, то равновесие его без изменения системы приложенных сил не нарушится от наложения на точки тела дополнительных связей, включая превращение деформируемого тела в абсолютно твердое. С помощью этой аксиомы устанавливается, в частности, связь между условиями равновесия сил, приложенных к твердому и деформируемому телам. Из аксиомы следует, что условия равновесия сил, приложенных к твердому телу, необходимы и для равновесия деформируемого тела. Но условия равновесия сил, приложенных к твердому телу, не являются достаточными для равновесия деформируемого тела.
Сформулированные аксиомы и являются той основой, на которой строится вся статика сил, приложенных к твердому телу.
Аксиомы статики характеризуют свойства сил, приложенных к абсолютно твердому телу или одной точке. Но они не учитывают материальных свойств тела или точки, характеризуемых их массой, а для тела — еще распределением массы в теле, влияние которых существенно при их движении.
Совместный учет действия сил и материальных свойств тел или точки содержится в аксиомах динамики. Такие аксиомы статики, как аксиома о параллелограмме сил, о равенстве сил действия и противодействия, аксиома связей, справедливы и в динамике. Так как в статике рассматриваются свойства и неравновесных систем сил, под действием которых твердое тело или точка не могут находиться в покое относительно инерциальной системы отсчета, то для оправдания этого в статике можно считать, что эти системы сил являются частями более укрупненных равновесных систем сил, под действием которых тело или материальная точка находится в покое или совершает движение по инерции.
Простейшие теоремы статики
Теорема о переносе силы вдоль линии действия
Действие силы на твердое тело не изменится от переноса силы вдоль своей линии действия.
Пусть в точке  твердого тела приложена сила
твердого тела приложена сила  (рис. 8). К этой силе на ее линии действия в точке
(рис. 8). К этой силе на ее линии действия в точке  в соответствии с аксиомой II добавим систему сил
в соответствии с аксиомой II добавим систему сил  , эквивалентную нулю, для которой
, эквивалентную нулю, для которой  . Выберем силу
. Выберем силу  , равную силе
, равную силе  . Полученная система трех сил
. Полученная система трех сил 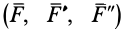 эквивалентна, согласно аксиоме о добавлении равновесной системы сил, силе
эквивалентна, согласно аксиоме о добавлении равновесной системы сил, силе  , т. е.
, т. е.
Система сил  , согласно аксиоме I, эквивалентна нулю и, согласно аксиоме II, ее можно отбросить. Получится одна сила
, согласно аксиоме I, эквивалентна нулю и, согласно аксиоме II, ее можно отбросить. Получится одна сила  , приложенная в точке
, приложенная в точке  , т. е.
, т. е.  . Окончательно получаем
. Окончательно получаем
Сила  приложена в точке
приложена в точке  . Она эквивалентна такой же по модулю и направлению силе
. Она эквивалентна такой же по модулю и направлению силе  , приложенной в точке , где точка —любая точка линии действия силы . Теорема доказана. Таким образом, точка приложения силы в абсолютно твердом теле несущественна. Силу для твердого тела можно считать приложенной в любой точке линии действия. Векторные величины, которые можно прикладывать в любой точке линии действия, называют скользящими. Сила, приложенная к твердому телу, есть вектор скользящий. В деформируемом теле силу нельзя переносить вдоль линии действия. Сила в этом случае не является скользящим вектором.
, приложенной в точке , где точка —любая точка линии действия силы . Теорема доказана. Таким образом, точка приложения силы в абсолютно твердом теле несущественна. Силу для твердого тела можно считать приложенной в любой точке линии действия. Векторные величины, которые можно прикладывать в любой точке линии действия, называют скользящими. Сила, приложенная к твердому телу, есть вектор скользящий. В деформируемом теле силу нельзя переносить вдоль линии действия. Сила в этом случае не является скользящим вектором.
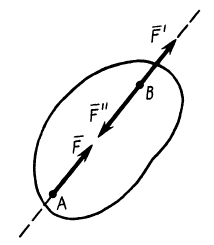
Рис. 8
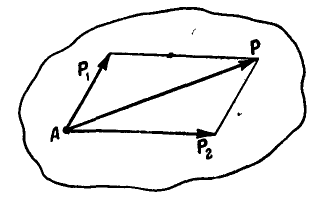
Теорема о трех силах
Если твердое тело под действием трех сил, две из которых пересекаются в одной точке, находится в равновесии, то линии действия таких трех сил пересекаются в одной точке.
Обратная теорема неверна, т. е. если линии действия трех сил пересекаются в одной точке, то такая система сил не обязательно является равновесной.
Пусть имеем систему трех сил  , две из которых, например
, две из которых, например  и
и  , пересекаются в одной точке
, пересекаются в одной точке  (рис. 9). Докажем, что если тело находится в равновесии под действием этих трех сил, то линия действия силы F3 пройдет через точку
(рис. 9). Докажем, что если тело находится в равновесии под действием этих трех сил, то линия действия силы F3 пройдет через точку  , т. е. линии действия трех сил пересекаются в одной точке.
, т. е. линии действия трех сил пересекаются в одной точке.
Силы  и
и  , линии действия которых пересекаются в уточке
, линии действия которых пересекаются в уточке  , перенесем в эту точку и заменим их равнодействующей
, перенесем в эту точку и заменим их равнодействующей  по аксиоме параллелограмма сил. Система трех сил свелась к эквивалентной системе двух сил
по аксиоме параллелограмма сил. Система трех сил свелась к эквивалентной системе двух сил  , находящихся в равновесии, так как твердое тело, на которое они действуют, по условиям теоремы находится в равновесии. Согласно аксиоме I, такие две силы должны быть направлены по одной прямой, проходящей через точки их приложения. Следовательно, линия действия силы
, находящихся в равновесии, так как твердое тело, на которое они действуют, по условиям теоремы находится в равновесии. Согласно аксиоме I, такие две силы должны быть направлены по одной прямой, проходящей через точки их приложения. Следовательно, линия действия силы  должна пройти через точку приложения силы
должна пройти через точку приложения силы  , т. е. точку пересечения сил
, т. е. точку пересечения сил  и
и  . Таким образом, три силы пересекутся в одной точке.
. Таким образом, три силы пересекутся в одной точке.
Теорема о трех силах позволяет в некоторых случаях определить линию действия неизвестной силы, приложенной к твердому телу.
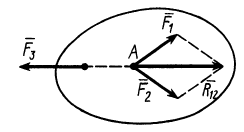
Рис. 9
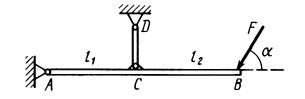
Рис. 10
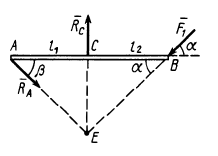
Рис. 11
Пример. Дана балка  , закрепленная, как указано на рис. 10. На балку действует активная сила
, закрепленная, как указано на рис. 10. На балку действует активная сила  , направление которой задано углом
, направление которой задано углом  . Определить линию действия силы реакции цилиндрического шарнира
. Определить линию действия силы реакции цилиндрического шарнира  .
.
Решение. Освободим балку от связей, заменив их силами реакций связей (рис. 11). Сила реакции стержня  на балку
на балку  направлена по стержню
направлена по стержню  . Ее линия действия пересекается с линией действия заданной силы в точке
. Ее линия действия пересекается с линией действия заданной силы в точке  . Согласно теореме о трех силах при равновесии балки, через точку
. Согласно теореме о трех силах при равновесии балки, через точку  должна пройти и линия действия силы реакции . Ее направление определится углом
должна пройти и линия действия силы реакции . Ее направление определится углом  , который зависит от угла и положения точки
, который зависит от угла и положения точки  :
:
Если  , то
, то  .
.
Всё о аксиомах статики
Как было указано выше, статика изучает условия относительного равновесия твердых тел или механических систем, находящихся под действием сил.
Силы возникают в результате взаимодействия между собой различных материальных тел. По своей природе сила является величиной векторной и вполне определяется, если известны ее точки приложения (или линия действия), направление и величина.
Величина силы измеряется при помощи прибора, называемого динамометром, и может быть выражена в единицах веса. За единицу силы мы в дальнейшем примем вес 1 л воды при 4°С; такая единица силы называется килограммом и обозначается сокращенно через кГ.
Линией действия силы называется прямая, вдоль которой направлена сила. В дальнейшем мы. будем обозначать силы жирными буквами Р, Q, F, N, а их численные значения (модули) светлыми буквами Р, Q, F, N... Несколько сил, приложенных к твердому телу, представляют систему сил.
Если твердое тело под действием системы сил остается в покое или движется по отношению к выбранным координатным осям так, что все его точки имеют одинаковые скорости и движутся прямолинейно и равномерно, то такое тело находится в состоянии равновесия, а силы, приложенные к нему, образуют уравновешивающуюся систему. Любая из сил уравновешивающейся системы является уравновешивающей по отношению к остальным силам.
Две системы сил называются эквивалентными, если при замене одной системы сил, приложенных к твердому телу, другой системой не нарушается покой тела, или если тело находилось в движении, то не изменяется это движение.
Если система сил эквивалентна одной силе, то эта сила называется равнодействующей системы, а отдельные силы системы по отношению к их равнодействующей называются составляющими силами.
В основу изучения статики положены истины, которые на протяжении многих столетий подтверждаются опытом. Эти истины, как было указано выше, называются аксиомами статики.
В дальнейшем, для краткости изложения, тело мы будем называть просто телом.
Аксиома 1. Две силы, приложенные к свободному телу, взаимно уравновешиваются тогда, и только тогда, когда они равны по величине и направлены по одной прямой в противоположные стороны.
Эта аксиома выражает, условие равновесия двух сил Р, приложенных к телу (рис. 17).
Аксиома 2. Присоединение и отбрасывание сил, взаимно уравновешивающихся, не изменяет действия сил, приложенных ранее к телу.
На основании этой аксиомы можно вывести важное следствие.
Пусть мы имеем силу Р, действующую на тело (рис. 18).
Возьмем на линии действия этой силы любую точку А и, согласно аксиоме 2, приложим в этой точке две силы  , направленные по линии действия силы Р в противоположные стороны. Тогда силы
, направленные по линии действия силы Р в противоположные стороны. Тогда силы  и
и  , согласно аксиоме 1,взаимно уравновешиваются, а на основании аксиомы 2 их можно отбросить и
, согласно аксиоме 1,взаимно уравновешиваются, а на основании аксиомы 2 их можно отбросить и
вместо силы Р получим силу  перенесенную в точку А.
перенесенную в точку А.
Отсюда следует, что не нарушая действия силы на тело, силу можно переносить в любую точку вдоль ее линии-действия. Следовательно, сила, приложенная к твердому телу, является вектором, скользящим или передвижным.
Аксиома 3. Равнодействующая двух сил, приложенных в одной точке и составляющих между собой некоторый угол, приложена в этой же точке и выражается по величине и направлению диагональю параллелограмма, построенного на данных силах.
Обозначим равнодействующую двух сил  и
и  приложенных к точке А (рис. 19), через Р, тогда на основании этой аксиомы имеем
приложенных к точке А (рис. 19), через Р, тогда на основании этой аксиомы имеем 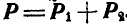 .
.
Последнее равенство обозначает операцию геометрического сложения сил  , т. е. сложения их по правилу параллелограмма.
, т. е. сложения их по правилу параллелограмма.
Обратно, всякую силу Р можно разложить на составляющие  по любым заданным направлениям I и II (рис. 20), для чего продолжаем направления I и II, и из конца силы Р проводим линии, параллельные заданным направлениям.
по любым заданным направлениям I и II (рис. 20), для чего продолжаем направления I и II, и из конца силы Р проводим линии, параллельные заданным направлениям.
Эти линии отсекут на заданных направлениях I и II искомые составляющие силы .
Аксиома 4. Силы, с которыми два тела действуют друг на друга, всегда равны по величине и направлены по одной прямой в противоположные стороны.
Эта аксиома выражает равенство действия и противодействия при взаимодействии друг на друга двух тел. Так, например известно, что между Землей и Луной имеются силы взаимного притяжения, причем эти силы равны по величине и направлены по прямой, соединяющей центры Земли и Луны, в противоположные стороны. Точно так же, если на неподвижной горизонтальной плоскости покоится шар, то действие шара на плоскость будет передаваться в точке касания плоскости и шара в виде давления, равного весу шара, направленного вертикально вниз.
В свою очередь, плоскость в той же точке будет действовать на шар вверх.
Эта сила называется реакцией плоскости; она равна по величине ддвлению и направлена вертикально вверх.
Аксиома 5. Равновесие нетвердого тела не нарушается, если это тело станет абсолютно твердым.
Эта аксиома, называемая принципом затвердения, находит широкое применение при изучении равновесия нетвердых тел.
Аксиома 6. Если тело несвободное, то действие связей на тело может быть заменено их реакциями.
При решении большинства задач механики приходится иметь дело с телами несвободными. Движение таких тел ограничено опорами или направляющими, которые являются связями для тел. В тех местах, где тело соприкасается со связями, происходят взаимодействия между телом и связями; эти взаимодействия могут быть представлены в виде сил. Силы, с которыми связи действуют на тело, называются реакциями связей, или просто реакциями, а равные и противоположно направленные им силы, представляющие действие тела на связи, называются давлениями.
На основании последней аксиомы при решении задач статики можно связи отбросить и рассматривать, например, равновесие несвободного тела, как тела свободного, находящегося под действием заданных сил и реакций связей. Такой прием удобен, как мы увидим дальше, при решении многих задач статики, где силами, подлежащими определению, являются реакции связей.
Различные виды связей и реакции, которыми эти связи могут быть заменены, рассмотрены в следующем параграфе.
Справочный материал о аксиомах статики
Статикой называют раздел механики, в котором изучают преобразования системы сил, приложенных к твердому телу, в системы, ей эквивалентные, и условия взаимной уравновешенности сил, приложенных к твердому телу
Предмет статики
Рассмотрим систему сил, приложенных к одному абсолютно твердому телу. Изучение возможности замены такой системы сил другими системами, оказывающими на данное тело такое же механическое воздействие, и, в частности, изучение условий взаимной уравновешенности сил, приложенных к твердому телу, составляют предмет статики.
Таким образом, статикой называют раздел механики твердого тела, в котором изучают преобразование системы сил, приложенных к твердому телу, в системы, ей эквивалентные, и условия взаимной уравновешенности таких систем.
В высших технических учебных заведениях курс теоретической механики обычно начинают со статики. Такое построение курса обусловлено требованиями учебных планов, необходимостью возможно раньше ознакомить студента со статикой как обязательной предпосылкой для курса сопротивления материалов и всех последующих инженерно-технических дисциплин. Имеет значение и то, что для изучения статики высшая математика не нужна в столь большом объеме, в котором она требуется для других разделов механики. Наконец, как уже было упомянуто, такое построение соответствует и историческому развитию нашей науки.
Исторические корни статики уходят в глубокую древность. Со времен Архимеда учение о силах и их равновесии является уже вполне сложившейся наукой. Крупными вехами в дальнейшем развитии статики явились открытие Стевином закона параллелограмма сил (см. § 3) и открытие современником Ньютона Вариньоном (1654—1722) его знаменитой теоремы о моменте равнодействующей силы (см. § 8). Однако окончательное оформление статика получила лишь после исследований Пуансо и, в частности, после открытия им метода приведения силы к данной точке (см. § 11).
Статика базируется на основных законах, принимаемых без математических доказательств и называемых аксиомами статики
Механика — наука точная
Все свои теоремы и правила она выводит путем строгих математических выкладок. Однако в основе механики и, в частности, статики лежат аксиомы—законы, принятые без математического доказательства. Математических доказательств этих законов не существует, хотя законы эти настолько просты, что кажутся очевидными. Под аксиомой механики мы не будем понимать какую-то непреложную и настолько очевидную истину, что даже доказательство ее совершенно излишне. Они представляют собой результат обобщения выводов, полученных из многолетних и многочисленных опытов и наблюдений над движением и покоем тел. Мы не имеем возможности проверить их непосредственно и располагаем лишь косвенными доказательствами, т. е. мы видим, что следствия, вытекающие из этих аксиом, подтверждаются наблюдениями: сооружения, построенные на основании законов механики, прочны, машины работают, приборы и аппараты действуют, корабли плавают, самолеты летают, запущенные нами космические корабли выходят на предписанные им орбиты, а затмения Солнца и Луны происходят в точности так, как это было заранее предсказано. Все это является доказательством правильности всех положений механики (в частности, ее аксиом), на основе которых были рассчитаны эти сооружения, сконструированы машины и произведены астрономические вычисления, потому что верные практические результаты могут быть получены только из правильных
предпосылок.
В статике принимают обычно шесть аксиом: принцип инерции, аксиому об абсолютно твердом теле, аксиому о присоединении уравновешенной системы сил, закон параллелограмма, принцип равенства действия и противодействия, аксиому о затвердении.
«Всякое тело продолжает удерживаться в своем состоянии покоя или равномерного и прямолинейного движения, пока и поскольку оно не понуждается приложенными силами изменять это состояние» (Ньютон)
Принцип инерции
Принцип (т. е. основоположение, с позиции которого надо рассматривать всякое механическое явление) инерции был сформулирован Ньютоном и принят им в качестве первого основного закона механики. Закон утверждает, что всякое тело должно находиться в состоянии покоя или равномерного прямолинейного движения, пока это состояние не будет изменено действующими на тело силами. Ньютон ничего не говорит о размерах тела, но в дальнейшем он показывает, что высказанные им аксиомы относятся к отдельной материальной частице или же к центру тяжести, в котором предполагается сосредоточенной масса всего тела. Таким образом, здесь под телом надо понимать материальную точку.
Проявление присущего материи свойства сохранять механическое движение, без действия сил сохранять свою скорость, называют инерцией.
Аксиома инерции содержит в себе как бы две части — аксиома инерции покоя и аксиома инерции движения. Та часть, которая утверждает, что тело остается в покое, пока силы не изменят этого состояния, очевидна и подтверждается повседневным опытом: мы никогда не видели, чтобы покоящиеся тела сами, без действия на них сил, приходили в движение. Эта так называемая инерция покоя была известна еще со времен Аристотеля.
Напротив, открытое Галилеем свойство материальных тел без действия сил сохранять состояние равномерного и прямолинейного движения (инерция движения) на первый взгляд как будто бы противоречит повседневному опыту. И движущиеся тела обычно нуждаются в постоянном действии силы для поддержания движения: чтобы передвигать телегу, нужна конская тяга, парусное судно без ветра не движется и т. д. Однако это противоречие закона инерции движения нашим повседневным наблюдениям только кажущееся. В обыденной жизни мы не встречаем тел, на которые не действовали бы никакие силы, на всяком движущемся теле всегда сказываются действия других тел. Катящаяся телега испытывает- сопротивление дороги, трение в осях, сопротивление воздуха; плывущее судно претерпевает сопротивление воды и воздуха. Эти силы (их называют диссипативными) и замедляют движение тел. Диссипативные силы невозможно уничтожить, но их иногда возможно значительно уменьшить.
Например, в машине можно смазать трущиеся части, заменить подшипники скольжения шариковыми подшипниками и т. п. Чем меньше диссипативные силы, тем дольше тело сохраняет свое движение. Велосипед, находящийся в хорошем состоянии, на свободном ходу катится дольше, чем старый и запущенный велосипед.
Отсюда можно заключить, что если бы нам удалось совершенно устранить сопротивление движению тела, то движение было бы равномерным. Вместе с тем, очевидно, движение было бы и прямолинейным, если, конечно, никакие силы не заставили бы это тело свернуть со своего прямолинейного пути. Практически невозможно никакой смазкой полностью уничтожить силы сопротивления. Поэтому для поддержания движения к телу необходимо приложить силу. Эта сила нужна не для осуществления движения, а лишь для преодоления сопротивлений. Для равномерного и прямолинейного движения нужна в точности такая движущая сила, какая необходима для преодоления сил сопротивления. Действительно, если движущая сила меньше сил сопротивления, то движение тела постепенно замедляется и тело останавливается. Если она больше сил сопротивления, то тело движется ускоренно. Если же движущая сила равна силе сопротивления, то не происходит ни замедления, ни ускорения—тело движется равномерно и, разумеется, прямолинейно.
Две силы, действующие на твердое тело, взаимно уравновешиваются тогда и только тогда, когда они равны по величине и действуют по одной прямой в противоположные стороны
Аксиома об абсолютно твердом теле. При равномерном движении или при покое тела движущая сила и сила сопротивления как бы уничтожают, или, как говорят, уравновешивают друг друга. Очевидно, что для равновесия двух сил, действующих на какое-либо твердое тело, точнее говоря, для того, чтобы твердое тело находилось в равновесии под действием только двух сил, необходимо, чтобы они были равны по величине, противоположны по направлению и действовали по одной и той же прямой. Если они направлены в противоположные стороны по одной и той же прямой, но не равны по величине, то тело приобретает ускоренное движение в сторону большей силы. Если же две силы, хотя бы и равные между собой, действуют по пересекающимся или скрещивающимся прямым, ю они тоже не могут уравновесить друг друга. Случай двух сил, направленных по разным прямым и приложенных к одной точке, рассмотрен в аксиоме параллелограмма. Такие две силы не находятся в равновесии. Две силы не уравновешивают друг друга и в том случае, если они действуют на одно и то же тело в противоположные стороны, но не по одной, а по параллельным прямым, что подробно рассмотрено в гл. IV.
Сформулируем условия равновесия двух сил: две силы, действующие на твердое тело, взаимно уравновешивают друг друга в том и только в том случае, если они равны по величине и действуют в противоположные стороны по одной и той же прямой. Это не только необходимые, но и достаточные условия равновесия двух сил.
Напомним, что здесь, как и всюду в теоретической механике, под твердым телом мы понимаем абсолютно твердое тело. Совершенно ясно, что две такие силы, приложенные к какому-либо реальному физическому телу, могут вызвать деформацию и даже разрушение тела. Лишь на абсолютно твердое тело такие взаимно уравновешенные силы никакого действия оказать не могут. Поэтому рассмотренную аксиому следует называть аксиомой об абсолютно твердом теле.
От присоединения к телу или отбрасывания от него уравновешенной системы сил равновесие тела не нарушается
Аксиома о присоединении уравновешенной системы сил. Взаимно уравновешенная система сил — это такая система, наличие которой эквивалентно ее отсутствию. В самом деле, поскольку согласно аксиоме об абсолютно твердом теле две взаимно уравновешенные силы не могут изменить движение или нарушить покой тела, мы вправе сделать
заключение, что такая взаимно уравновешенная система сил никак не влияет на твердое тело. Как мы скоро убедимся, взаимно уравновесить друг друга могут не только две силы, но и любое большее количество сил. Вообще под уравновешенной системой сил понимают совокупность сил, которая, будучи приложена к твердому телу, находящемуся в покое, не выводит его из этого состояния.
В статике принимают как аксиому, что равновесие твердого тела не нарушится, если к телу приложить или от него отбросить взаимно Уравновешенную систему сил. Если же твердое тело находилось не в покое, а в движении перед тем, как мы приложили к нему или отбросили от него взаимно уравновешенную систему сил, то движение тела от этого не изменится.
Всякая данная система сил, действующих на твердое тело, и другая система, полученная из данной путем присоединения или отбрасывания уравновешенной системы сил, оказывает на твердое тело, совершенно одинаковое действие. Обе эти системы эквивалентны.
Действие силы на твердое тело не изменится, если эту силу перенести по линии ее действия.
Сила как скользящий вектор
Докажем теорему, согласно которой всякую силу, действующую на абсолютно твердое тело, можно перенести по прямой, по которой эта сила направлена, в какую-либо другую точку тела, отчего действие силы не изменится.
Пусть на тело действует сила F, приложенная к телу в точке А (рис. 1, а). Прямую линию, вдоль которой направлен вектор силы, называют линией действия силы, или прямой действия силы. Возьмем наней произвольную точку В и приложим к телу в этой точке две силы F1 и F2, численно равные силе F и направленные по той же линии действия, причем пусть F1 направлена в ту же сторону, что и F, a F2 — в противоположную (рис. 1, б).
Действие силы F на тело не изменилось от приложения к нему взаимно уравновешенных сил F1 и F2. Но силы F и F2 также являются двумя равными и противоположно направленными силами, действующими на то же абсолютно твердое тело по одной и той же прямой. :Можно отбрасывать такие уравновешенные системы сил. Отбросив F и F2 (рис. 1, в), убедимся, что на тело действует только одна сила F1, которая представляет собой силу F, перенесенную вдоль линии действия в другую точку, что и требовалось доказать. Это свойство силы выражают словами: сила есть вектор скользящий. Выражение образное и очень распространенное, но не вполне правильное, так как оно характеризует свойство не вектора, а абсолютно твердого тела.
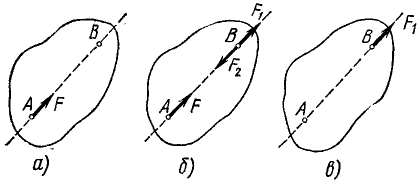
Рис. 1
Наши рассуждения символически можно записать так:
Каждая из сил F и F1 может быть уравновешена одной и той же силой F2. Силу F2, которая, будучи приложенной к твердому телу, уравновешивает данную силу F, называют уравновешивающей данную силу. Две силы F и F1 называют эквивалентными, т. е. равноценными по своему действию на тело, если они имеют одну и ту же уравновешивающую силу.
Это понятие распространяется и на систему сил: системы сил, имеющие одну и ту же уравновешивающую систему сил, называют эквивалентными системами сил.
Равнодействующая двух сил, приложенных к одной точке н направленных под углом друг к другу, изображается по величине и направлению диагональю параллелограмма, построенного на этих силах как на сторонах
Закон параллелограмма сил
Две силы, приложенные к одной материальной частице и направленные под углом друг к другу, эквивалентны одной силе, называемой равнодействующей силой; эта равнодействующая может быть представлена как диагональ параллелограмма, построенного на данных силах как на сторонах, частице О твердого тела приложены две силы: 1) по величине равная P и направленная по прямой OA и 2) по величине равная Q и направленная по прямой OB (рис. 2). Мы представим эти силы в виде векторов, т. е. изобразим силу P вектором  и силу Q-вектором
и силу Q-вектором  . На этих отрезках как на сторонах построим параллелограмм OA1C1B1. Согласно аксиоме параллелограмма две силы
. На этих отрезках как на сторонах построим параллелограмм OA1C1B1. Согласно аксиоме параллелограмма две силы  и
и  по своему действию на данную материальную частицу О эквивалентны одной силе
по своему действию на данную материальную частицу О эквивалентны одной силе  , т. е. сила, изображаемая вектором R, является равнодействующей системы сил и .
, т. е. сила, изображаемая вектором R, является равнодействующей системы сил и .
Это правило называют правилом параллелограмма, а самый процесс—сложением сил по способу параллелограмма. Название это нельзя признать удачным, так как физического сложения сил не происходит, равнодействующая не есть сумма слагаемых сил, а лишь равноценна им обеим, вместе взятым. Пусть, например, два трактора тянут какой-либо груз О: один с силой  по направлению OA, второй с силой
по направлению OA, второй с силой  по направлению OB. Правило параллелограмма лишь утверждает, что эти два трактора оказывают на груз О такое же действие, какое оказывал бы один трактор, который тянул бы груз О с силой
по направлению OB. Правило параллелограмма лишь утверждает, что эти два трактора оказывают на груз О такое же действие, какое оказывал бы один трактор, который тянул бы груз О с силой  по направлению ОС.
по направлению ОС.
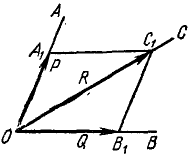
Рис. 2
Сложение сил, направленных под углом друг к другу, называемое геометрическим сложением, сильно отличается от сложения величин, к которому мы привыкли в арифметике и в алгебре.
Геометрическое сложение обозначается обычным знаком « + », но над слагаемыми и над суммой ставят стрелки, означающие, что это векторные величины.
Геометрические равенства выглядят иногда необычно с точки зрения арифметики.
Так, например, на рис. 3, а сила P = 3 н и сила Q = 4 н перпендикулярны друг другу; по теореме Пифагора находим R= 5 н; на рис. 3,б сила Р = 3 н и сила Q = 3 н по той же теореме  ; на рис. 3, в величины сил P и О
; на рис. 3, в величины сил P и О
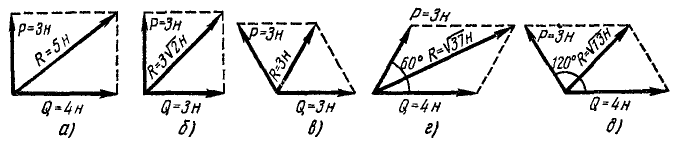
Рис. 3
те же, но направлены они под углом 120 о друг к другу, а потому R = 3 н; на рис. 3, г сила Р = 3 н, сила Q = 4 н и направлены они под углом 60° друг к другу. Применяя теорему косинусов, находим R 2 = 9 + 16—2∙3∙4∙cos 120° = 37 н; иа рис. 3, д те же силы составляют угол 120° и по той же теореме R 2 = 9+ 4-16—2∙3∙4∙cos60°=13 н.
Из геометрии известно, что диагональ параллелограмма всегда меньше арифметической суммы его непараллельных сторон и больше их разности. Поэтому, если в геометрической сумме 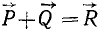
P больше Q, то всегда имеет место алгебраическое неравенство
P-Q≤R≤P+Q.
Равенство P+Q = R имеет место, если силы P и Q направлены по одной прямой и в одну сторону, а равенство P — Q = R, если PnQ направлены в противоположные стороны. В этом случае равнодействующая R направлена в сторону большей силы Р.
Аксиома говорит о сложении сил, приложенных к одной материальной частице, к одной точке. Но складывать силы по правилу параллелограмма можно и в том случае, если они приложены к одному твердому телу и линии их действия пересекаются. В таком случае нужно перенести обе силы в точку пересечения их линий действия и там сложить по правилу параллелограмма, причем если эта точка находится за пределами того тела, на которое действуют обе слагаемые силы, то равнодействующую силу нужно перенести вдоль ее линии действия в какой-либо из точек тела.
Для равновесия трех непараллельных сил, лежащих в одной плоскости, необходимо, чтобы их линии действия пересекались в одной точке
Аксиомы, с которыми мы только что ознакомились, позволяют вывести необходимое условие равновесия трех непараллельных сил: если три непараллельные силы, лежащие в одной плоскости, взаимно уравновешены, то их линии действия пересекаются в одной точке.
Пусть в каких-либо точках А, В и C (рис. 4) к твердому телу, не показанному на чертеже, приложены три силы  ,
,  и
и , линии действия которых непараллельны между собой, но лежат в одной плоскости. Покажем, что если система этих трех сил уравновешена, то линии действия всех трех сил пересекаются в одной точке. Всякие две непараллельные прямые на плоскости пересекаются. Следовательно, линии действия двух сил
, линии действия которых непараллельны между собой, но лежат в одной плоскости. Покажем, что если система этих трех сил уравновешена, то линии действия всех трех сил пересекаются в одной точке. Всякие две непараллельные прямые на плоскости пересекаются. Следовательно, линии действия двух сил  и
и  пересекаются где-либо в точке О. Перенесем силы и точку пересечения их линий действия и сложим их, т. е. заменим одной равнодействующей
пересекаются где-либо в точке О. Перенесем силы и точку пересечения их линий действия и сложим их, т. е. заменим одной равнодействующей  . Данная уравновешенная система трех сил , , и
. Данная уравновешенная система трех сил , , и  заменена нами эквивалентной ей (а следовательно, также уравновешенной) системой двух сил
заменена нами эквивалентной ей (а следовательно, также уравновешенной) системой двух сил  и . Но всякие две силы, находящиеся в равновесии, действуют по одной прямой, а потому линия действия силы проходит через точку 0. Предположение, что все три уравновешенные силы лежат в одной плоскости, сделано для упрощения доказательства, и оно излишне, поскольку три уравновешенные силы не могут не лежать в одной плоскости.
и . Но всякие две силы, находящиеся в равновесии, действуют по одной прямой, а потому линия действия силы проходит через точку 0. Предположение, что все три уравновешенные силы лежат в одной плоскости, сделано для упрощения доказательства, и оно излишне, поскольку три уравновешенные силы не могут не лежать в одной плоскости.
Рис. 4
Это условие равновесия трех сил является необходимым, но не достаточным условием, т. е. если три непараллельные силы находятся в равновесии, то их линии действия обязательно пересекаются в одной точке. Но если линии действия трех сил пересекаются в одной точке, то отсюда вовсе не следует, что эти три силы представляют собой уравновешенную систему сил.
В качестве иллюстрации необходимого условия равновесия трех непараллельных сил приведем такой пример. Для установившегося движения самолета, т. е. чтобы он мог, не теряя набранной высоты, лететь равномерно и прямолинейно, необходимо, чтобы система действующих сил была уравновешенной. Можно считать, что на самолет действуют три силы: его вес, сила тяги и сила сопротивления воздуха (точнее, равнодействующая всех сил сопротивления воздуха, действующих на различные части самолета). Для равновесия этих трех сил необходимо, чтобы их линии действия пересекались в одной точке. Линией действия веса самолета является вертикаль, проходящая через центр тяжести, а сила тяги действует вдоль оси пропеллера. Отсюда вытекает правило, называемое основным правилом самолетостроения: равнодействующая сил сопротивления воздуха должна пересекать ось пропеллера в той же точке, где ее пересекает вертикаль, проходящая через центр тяжести самолета.
«Действию всегда есть равное и противоположное противодействие, иначе — взаимодействия двух тел друг на друга всегда между собой равны и направлены в противоположные стороны» (Ньютон)
Принцип равенства действия и противодействия. Силы, приложенные к данному телу, вызываются другими материальными телами. Отдельно от материальных тел, независимо от них, сил в природе не существует. Поясним это следующим примером.
Представим себе, что санки C скользят по ледяной горе AB (рис. 5). На санки действуют следующие силы: сила тяжести  (вес санок), сила
(вес санок), сила  давления со стороны наклонной плоскости АВ, сила трения
давления со стороны наклонной плоскости АВ, сила трения  о лед и сила
о лед и сила  сопротивления воздуха. Все эти силы действуют на данное тело вследствие наличия других материальных тел и не существовали бы, если бы этих тел не было. Так, сила тяжести является силой притяжения санок Землей. Давление
сопротивления воздуха. Все эти силы действуют на данное тело вследствие наличия других материальных тел и не существовали бы, если бы этих тел не было. Так, сила тяжести является силой притяжения санок Землей. Давление  горы на санки и сила трения санок о гору вызваны наличием горы АВ. Сила сопротивления воздуха не существовала бы, если бы санки двигались в безвоздушном пространстве. Все силы, действующие на санки, вызваны другими материальными телами.
горы на санки и сила трения санок о гору вызваны наличием горы АВ. Сила сопротивления воздуха не существовала бы, если бы санки двигались в безвоздушном пространстве. Все силы, действующие на санки, вызваны другими материальными телами.
Но действия материальных тел не бывают односторонними, они всегда взаимны, тела взаимодействуют между собой.
В рассмотренном примере на санки действует сила , с которой санки притягиваются к Земле, точнее, к ее центру. Однако санки тоже притягивают к себе Землю, и сила притяжения Земли санками приложена к центру Земли. Санки испытывают сопротивление воздушной среды, но они и сами действуют на эту среду, вызывая в ней перемещения ее частиц. Покрытые льдом доски горы не допускают перемещения санок в сторону дощатого настила. Но и сани давят на ледяную гору. Мы видим, что и здесь действия двух тел взаимны. При движении санок по льду трутся обе соприкасающиеся поверхности (полозья саней и ледяная поверхность горы) и возникают две силы трения. Одна приложена к саням и замедляет скольжение; другая — к ледяному покрытию горы, отрывает и увлекает за санями частицы льда. Лед и сани взаимодействуют между собой, и для трения необходимо наличие обоих тел — санок и льда.
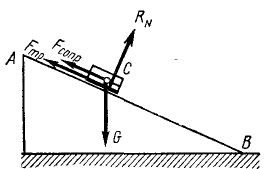
Рис. 5
Аксиома утверждает, что действия двух тел друг на друга равны и противоположны. В нашем примере согласно этой аксиоме Земля притягивает к себе санки с такой же, но обратно направленной силой, с какой санки притягивают Землю; давление санок на гору равно и противоположно давлению горы на санки, силы трения санок о гору и горы о санки равны и противоположны, а воздух сопротивляется движению санок с силой, равной и противоположной той, с которой санки действуют на воздух.
Таких примеров можно привести сколь угодно много и на каждом из них убедиться, что силы, с которыми два тела действуют друг на друга, равны и противоположны.
Нужно твердо усвоить, что механические взаимодействия двух тел хотя и равны по величине и противоположны по направлению и действуют по одной прямой, но не уравновешивают друг друга, так как они приложены не к одному, а к разным телам. Давление или притяжение одного тела может привести в движение другое тело именно потому, что действие и. противодействие приложены к двум различным телам.
Если, например, буксирный теплоход тянет на канате баржу, то и баржа тянет буксир в обратном направлении с равной силой. В этом можно убедиться, прикрепив на обоих концах каната по динамометру, чтобы один из них измерял силу, с которой буксир тянет баржу, а другой — силу, с которой баржа противодействует буксиру. Показания обоих динамометров будут одинаковы. Следовательно, действие буксира на баржу равно и противоположно действию баржи на буксир. Почему же в таком случае вся система перемещается в сторону буксира, а не в обратном направлении? Ответ на этот вопрос очевиден: буксир отталкивается от воды винтом или гребными колесами. По той же аксиоме этой силе, приложенной к шлицам гребного колеса, соответствует другая, равная и противоположная сила, приложенная к воде. Обе эти силы не уравновешивают друг друга, поскольку они не приложены к одному телу.
Приложенная к буксиру сила, с которой он отталкивается от воды, при ускоренном движении больше той силы, также приложенной к буксиру, с которой тянет его назад баржа, при замедленном—меньше, при равномерном движении и при покое — равна. Но всегда — и в покое, и во всяком движении — взаимодействия гребных колес и воды равны и противоположны между собой, и всегда действие буксира на баржу равно и противоположно действию баржи на буксир. Действию всегда есть равное и противоположное противодействие.
Эту аксиому называют принципом равенства действия и противодействия. Она сформулирована Ньютоном, принята им в качестве третьего основного закона механики и опубликована в книге «Математические начала натуральной философии».
Равновесие нетвердого тела не нарушится, если это тело затвердеет
Аксиома затвердения
Если какое-либо нетвердое тело находится в равновесии под действием некоторой системы сил, то можно предположить, что другое. тождественное пo форме, но абсолютно твердое тело под действием такой же системы сил тоже должно быть в равновесии. Аксиома утверждает, что от затвердения равновесие нетвердого тела не нарушится. В статике встречаются задачи о равновесии тела, состоящего из нескольких твердых тел, так или иначе связанных («сочлененных») между собой. Такое тело находится в равновесии, если в равновесии находятся все составляющие его тела. В некоторых случаях такое тело рассматривают как затвердевшее, т. е. как одно абсолютно твердое тело.
Обратим внимание на то, что обратное утверждение является неправильным, т. е. нельзя утверждать, что равновесие твердого тела обязательно сохранится, если это тело перестанет быть твердым.
Что нужно знать о статике
В результате изучения раздела «Статика» необходимо уметь складывать силы, определять равнодействующую любого числа данных сил. Нужно уметь также решить и обратную задачу — данную силу разложить на две или три составляющих.
Главное место в статике занимает учение о равновесии систем сил. Системой называется совокупность сил, приложенных к телу или к точке.
Для удобства изучения системы сил разделяются на плоские и пространственные. В свою очередь плоские системы сил делятся на три группы: а) системы сил, сходящихся в одной точке; б) системы параллельных сил и в) системы сил, расположенных в плоскости как угодно. На аналогичные три группы делятся и пространственные системы сил.
В соответствии с этим дальнейшее изложение методов и примеров решения задач проведено по этой классификации систем сил.
Для любой плоской, а также и пространственной системы сил показаны способы и методы сложения сил и, в частности, определения их равнодействующей силы. В главе II «Плоская система сходящихся сил» показаны способы разложения силы на две составляющие; в главе IV «Пространственная система сил» показан способ разложения силы на три составляющие вдоль трех взаимно перпендикулярных осей. Наиболее широко рассмотрены задачи на равновесие сил, при решении которых используются условия равновесия всех перечисленных выше систем сил.
При решении задач необходимо иметь в виду, что с I января 1963 г. в СССР введена в действие Международная система единиц (ГОСТ 9867 —61), или сокращенно СИ (интернациональная система).
В настоящее время осуществляется переход всех измерений и технических расчетов на эту систему.
Международная система (СИ) имеет шесть основных единиц и две дополнительные. Из основных только три непосредственно применяются в теоретической механике:
- единица длины —метр (1 м),
- единица массы—килограмм (1 кг),
- единица времени —секунда (1 сек).
- Из дополнительных в механике употребляется лишь единица измерения плоского угла — радиан (1 рад) — угол между двумя
- радиусами круга, вырезающий на окружности дугу, длина которой равна радиусу.
- Остальные единицы Международной системы (СИ)— производные и в их числе единица измерения силы ньютон (1 н).
Если в известную из физики формулу второго закона Ньютона

вместо массы т и ускорения а подставить единицы их измерения — соответственно 1 кг и 1  то получим единицу измерения силы равную к. Таким образом,
то получим единицу измерения силы равную к. Таким образом,

Иными словами, ныотон — это сила, сообщающая единице массы (1 кг) единицу ускорения 
Если в условии задачи задана масса нагрузки, то необходимо определить ее вес G:
где  —ускорение силы земного притяжения.
—ускорение силы земного притяжения.
В технической системе единиц (в системе МКГСС) сила измеряется в килограммах 
Соотношение между 1 н и 1 кГ таково:
1 н = 0,102 кГ и 1 кГ = 9,81 н.
При приближенных расчетах можно пользоваться округленными соотношениями:

Общую формулу перехода от единиц технической системы (Т кГ) к единицам СИ (S н) можно выразить так:
Соответственно формула перехода от единиц СИ (S н) к единицам технической системы (Т кГ) выразится в виде 
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Система сходящихся сил
- Моменты силы относительно точки и оси
- Теория пар сил
- Приведение системы сил к простейшей системе
- Тело на сферической и стержневых опорах
- Приведение системы сил к простейшему виду
- Плоское движение тела
- Принцип виртуальных перемещений
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Статика – раздел теоретической механики
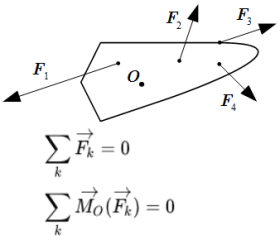
Определение и роль статики в теоретической механике
Основной задачей статики является установление законов преобразования системы сил в эквивалентные системы. Методы статики применяются не только при изучении тел, находящихся в равновесии, но и в динамике твердого тела, при преобразовании сил в более простые эквивалентные системы.
Под состоянием равновесия, в статике, понимается состояние, при котором все части механической системы покоятся относительно некоторой инерциальной системы координат. Одним из базовых объектов статики являются силы и точки их приложения.
Понятие силы
Единицей измерения силы является один Ньютон:
.
В технике широко используется килоньютон:
.
Как следует из определения, сила – это векторная величина, которая, в трехмерном пространстве, имеет три проекции на оси координат. Также задать силу можно с помощью абсолютной величины (модуля) и направления. Для материальной точки, сила приложена к самой точке. Но если мы рассматриваем твердое тело, то кроме вектора силы нам нужно еще указать и точку ее приложения. Таким образом, действие силы на твердое тело характеризуется вектором силы и точкой ее приложения. Если выбрать систему отсчета, то действие силы на твердое тело определяется двумя векторами. Это вектор силы, и вектор, проведенный из начала системы отсчета в точку приложения силы.
Система сил, действующих на тело – это совокупность векторов сил, приложенных к телу, и точек их приложения.
Эквивалентные системы сил Две системы сил являются эквивалентными, если законы движения любых точек твердого тела совпадают при действии любой из этих систем.
Эквивалентное преобразование системы сил – это переход от одной системы сил к эквивалентной ей системе.
Система взаимно уравновешивающихся сил – это система сил, не меняющая уравнений движения или уравнений равновесия твердого тела. То есть это система, эквивалентная отсутствию сил.
Равнодействующая – это одна сила, действие которой эквивалентно действию данной системы сил.
Закрепленные, скользящие и свободные векторы
Поскольку действие силы на твердое тело определяется двумя векторами, то часто под силой подразумевают множество, состоящее из двух векторов – вектора силы, и вектора точки ее приложения относительно выбранной системы координат. Такие множества подразделяются на три класса, для которых вводят специальные термины.
Закрепленный вектор – это множество, состоящее из образующего вектора и точки его приложения. Два закрепленных вектора считаются равными только в том случае, если равны их образующие векторы и совпадают точки приложения. Закрепленный вектор также называют связанным или фиксированным вектором.
Скользящий вектор – это множество, состоящее из образующего вектора и точки его приложения, обладающее тем свойством, что точку приложения можно перемещать вдоль прямой, параллельно образующему вектору. То есть два скользящих вектора считаются равными, если равны образующие векторы и точки их приложения расположены на одной прямой, параллельной образующему вектору.
Свободный вектор – это множество, состоящее из образующего вектора и точки его приложения. Два свободных вектора считаются равными, если равны образующие векторы, не зависимо от точек приложения.
Линия действия силы – это прямая, проведенная через точку приложения силы параллельно ее направлению.
Если мы рассматриваем упругое тело, то сила – это закрепленный вектор. Деформации зависят не только от величин и направлений сил, но и от точек их приложения. Если мы рассматриваем движение или равновесие абсолютно твердого тела, то действующая сила является скользящим вектором. Перемещение ее точки приложения вдоль линии ее действия не меняет уравнений движения или уравнений равновесия. Угловая скорость вращения абсолютно твердого тела является свободным вектором. Она характеризует движение в целом, и ее значение одинаково во всех точках тела.
С математической точки зрения, статика – это алгебра скользящих векторов.
Проекции силы на оси координат
Сила в трехмерном пространстве
Пусть у нас есть декартова система координат Oxyz . И пусть – единичные векторы, направленные вдоль ее осей , и , соответственно. Пусть – проекции вектора силы на оси координат. Тогда разложение силы на составляющие вдоль координатных осей имеет вид:
.
Абсолютное значение (модуль) силы:
.
Введем единичный вектор , направленный вдоль вектора силы . Тогда
.
Эта формула выражает тот факт, что вектор силы можно задать, указав ее модуль F и направление . Вектор имеет три проекции на оси координат: . Поскольку его длина равна единице: , то они связаны соотношением:
.
То есть единичный вектор имеет только две независимые компоненты. Таким образом, для задания вектора силы нужно знать три величины:
либо три проекции на оси координат ;
либо модуль F и направление , которое задается двумя независимыми величинами.
Введем углы между вектором силы и осями координат , и . Тогда проекции силы на оси координат определяются по формулам:
;
.
Косинусы углов называются направляющими косинусами.
Направляющие косинусы вектора – это косинусы углов между вектором и осями координат. Они являются проекциями единичного вектора , сонаправленного с :
,
и связаны соотношением:
.
Сила на плоскости
Результаты, приведенные выше, можно применить и для плоской декартовой системы координат Oxy . В этом случае имеем:
;
;
;
;
;
;
.
Поскольку , то . Последнее уравнение представляет собой известную тригонометрическую формулу:
.
Для задания вектора силы , необходимо знать две независимые величины:
либо проекции вектора на оси координат ;
либо модуль F и направление , которое задается одним углом .
Аксиомы статики
Часть аксиом являются основными законами механики. Другая часть относится к законам преобразования сил, действующих на абсолютно твердое тело, и применяется только к задачам теоретической механики. По своей сути, они выражают собой тот факт, что действие силы на тело является скользящим вектором.
1. Аксиома инерции (закон инерции Галилея)
Существуют такие системы отсчета, в которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если тело покоилось в определенный момент времени, то оно будет покоиться и в последующие моменты.
Такие системы отсчета называются инерциальными. В механике, если это особо не оговорено, под системой отсчета подразумевается именно инерциальная система отсчета. Аксиому инерции иногда формулируют так.
1′. Аксиома инерции
В инерциальной системе отсчета, под действием взаимно уравновешивающихся сил, материальная точка находится в состоянии покоя или движется прямолинейно и равномерно, а первоначально покоившееся тело продолжает покоиться и в последующие моменты времени.
2. Аксиома равновесия двух сил
Две силы, приложенные к абсолютно твердому телу, являются уравновешенными тогда и только тогда, когда они равны по модулю, направлены в противоположные стороны и их линии действия совпадают.
3. Аксиома присоединения и исключения уравновешивающихся сил
Кинематическое состояние твердого тела не изменится, если к действующей на него системе сил прибавить или отнять уравновешенную систему сил.
То есть, прибавляя или исключая уравновешенную систему сил, мы получаем эквивалентную систему сил.
Следствие аксиом 2 и 3
Действие силы на твердое тело не изменится, если точку приложения силы перенести вдоль ее линии действия. То есть сила, приложенная к твердому телу, является скользящим вектором. Доказательство
4. Аксиома параллелограмма сил
Две силы, приложенные к телу в одной точке, можно заменить их равнодействующей силой, равной векторной сумме этих сил и приложенной к той же точке.
Верно и обратное. Любую силу можно разложить на две (и более) силы по правилу векторной суммы (по правилу параллелограмма), приложенных в той же точке, что и исходная сила.
То есть, если силы и приложены в одной точке, то их можно заменить равнодействующей , приложенной к той же точке. Сумму векторов можно найти двумя способами.
1) Можно вычислить проекции сил на оси прямоугольной системы координат:
.
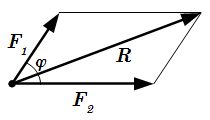
Сложение сил по правилу параллелограмма
2) Можно сложить векторы по правилу параллелограмма (см. рисунок).
;
.
Здесь – угол между векторами и . Точкой обозначено скалярное произведение векторов.
5. Аксиома равенства действия и противодействия (3-й закон Ньютона)
Всякому действию соответствует равное и противоположно направленное противодействие.
То есть если мы возьмем все силы, действующие на тело 2 со стороны тела 1, и объединим их с силами, действующими на тело 1 со стороны тела 2, то получим уравновешенную систему сил.
6. Принцип отвердевания
Если деформируемое тело находится в равновесии, то его равновесие не нарушится, если тело считать абсолютно твердым.
Система сходящихся сил
Система сходящихся сил всегда имеет равнодействующую , равную векторной сумме этих сил:
,
и приложена в точке их пересечения.
Таким образом, проекции равнодействующей системы сходящихся сил на координатные оси равны алгебраическим суммам проекций этих сил на оси координат:
;
.
Условия равновесия системы сходящихся сил
Если тело или система тел, на которые действует сходящаяся система сил, находится в покое, то равнодействующая этих сил равна нулю:
.
Это дает три уравнения равновесия:
.
Теорема о трех непараллельных силах
Если твердое тело находится в равновесии под действием трех сил, линии действия двух из которых пересекаются в одной точке, то все силы лежат в одной плоскости и являются сходящимися.
Следствие
Если твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то эти силы являются сходящимися.
Параллельные силы
Ранее мы отмечали, что система сходящихся сил имеет равнодействующую. То есть такую систему можно заменить одной силой. Приведем еще важные примеры систем сил, имеющих равнодействующую.
Две силы одного направления
Пусть мы имеем две однонаправленные параллельные силы и . Переместим точки их приложения вдоль линий их действия в точки A и B так, чтобы отрезок AB был перпендикулярен силам. Тогда система сил и имеют равнодействующую , приложенную в точке C . Направление равнодействующей совпадает с направлениями и . Абсолютная величина равна сумме сил:
.
Точка приложения C находится между A и B и делит отрезок AB обратно пропорционально модулям сил:
.
Две противоположно направленные силы
Теперь рассмотрим противоположно направленные силы и , различающиеся по величине, . Пусть . Эта система также имеет равнодействующую , направление которой совпадает с направлением большей по модулю силы, а абсолютное значение равно абсолютному значению разности модулей сил:
.
Точка приложения C равнодействующей находится на продолжении отрезка AB , ближе к наибольшей по модулю силе . Расстояния до точек A и B также обратно пропорциональны и :
.
Момент силы относительно точки
Определение
Абсолютное значение момента силы относительно точки O равно произведению силы на плечо этой силы относительно выбранной точки O . Направление момента перпендикулярно плоскости, проходящей через точку O и линию действия силы.
Доказательство
Геометрическая интерпретация
Пусть векторы и расположены в плоскости рисунка. Согласно свойству векторного произведения, вектор перпендикулярен векторам и , то есть перпендикулярен плоскости рисунка. Его направление определяется правилом правого винта. На рисунке вектор момента направлен на нас. Пусть α – угол между векторами и . Абсолютное значение момента:
.
Из точки O проведем перпендикуляр OH к линии действия силы . Из прямоугольника OAH имеем: . Тогда
.
То есть абсолютное значение момента силы относительно точки O равно произведению силы F на плечо |OH| этой силы относительно точки O .
Компоненты момента силы в декартовой системе координат
Выберем декартову систему координат Oxyz с началом в точке O . Найдем компоненты вектора момента силы в этой системе координат относительно ее начала.
.
Здесь – единичные векторы в направлении осей ; – координаты точки A в выбранной системе координат: .
Таким образом, момент силы имеет следующие компоненты:
(М.1) ;
(М.2) ;
(М.3) .
Компоненты представляют собой значения момента силы относительно осей , соответственно.
Свойства момента силы относительно центра
Момент относительно центра O , от силы, проходящей через этот центр, равен нулю.
Доказательство
Если точку приложения силы переместить вдоль линии, проходящей через вектор силы, то момент, при таком перемещении, не изменится.
Доказательство
Момент от векторной суммы сил, приложенных к одной точке тела, равен векторной сумме моментов от каждой из сил, приложенных к этой же точке:
.
Доказательство
То же самое относится и к силам, чьи линии продолжения пересекаются в одной точке.
Если векторная сумма сил равна нулю:
,
то сумма моментов от этих сил не зависит от положения центра, относительно которого вычисляются моменты:
.
Доказательство
Теорема Вариньона о моменте равнодействующей
Если данная система сил имеет равнодействующую, то момент равнодействующей относительно любой точки равен векторной сумме моментов сил системы относительно той же точки.
Пара сил
Из предыдущих формул ⇑ видно, что если противоположно направленные силы имеют равные модули: , то система сил не имеет равнодействующей. Действительно, в этом случае . Пытаясь использовать предыдущие формулы, мы получим деление на нуль. Такую систему сил называют парой сил.
Пара сил – это система из двух сил , равных по абсолютной величине, имеющих противоположные направления, приложенных к разным точкам тела и не лежащих на одной прямой.
Плечо пары сил – это кратчайшее расстояние h между линиями действия сил, входящих в пару.
Момент пары сил – это векторная сумма моментов сил, входящих в пару, вычисленная относительно любой точки. Абсолютное значение момента пары равно произведению силы на плечо пары:
.
Теорема о независимости выбора центра при вычислении момента пары
Векторная сумма моментов сил, составляющих пару, не зависит от выбора точки, относительно которой вычисляются моменты.
Теорема об эквивалентности пар
Две пары, имеющие равные векторы моментов, эквивалентны. То есть у пары можно менять модуль силы и длину плеча, оставляя неизменным ее момент.
Теорема о возможности перемещения пары
Пару сил можно переносить в любом направлении. Другими словами, если пару сил переместить параллельным переносом в любое положение, то она будет эквивалентна исходной паре.
Теорема о сложении нескольких пар
Система нескольких пар сил эквивалентна одной паре, вектор момента которой равен векторной сумме моментов исходных пар.
Условие равновесия пар
Система, состоящая только из нескольких пар, является уравновешенной, если векторная сумма моментов пар равна нулю:
.
Момент силы относительно оси
Часто встречаются случаи, когда нам нужно знать не все компоненты момента силы относительно выбранной точки, а только проекцию момента на выбранное направление.
Момент силы относительно оси, проходящей через точку O – это проекция вектора момента силы относительно точки O , на направление оси.
Свойства момента силы относительно оси
Момент относительно оси от силы, линия действия которой проходит через эту ось, равен нулю.
Доказательство
Момент относительно оси от силы, параллельной этой оси равен нулю.
Доказательство
Вычисление момента силы относительно оси
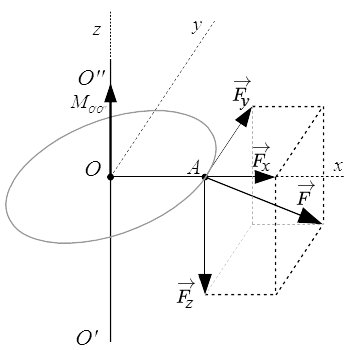
Пусть на тело, в точке A действует сила . Найдем момент этой силы относительно оси O′O′′ .
Построим прямоугольную систему координат. Направим ось z вдоль O′O′′ . Из точки A опустим перпендикуляр AO на O′O′′ . Через точки O и A проводим ось Ox . Перпендикулярно Ox и Oz проводим ось Oy . Разложим силу на составляющие вдоль осей системы координат:
.
Сила пересекает ось O′O′′ . Поэтому ее момент равен нулю. Сила параллельна оси O′O′′ . Поэтому ее момент также равен нулю. По формуле (М.3) находим:
.
Заметим, что компонента направлена по касательной к окружности, центром которой является точка O . Направление вектора определяется правилом правого винта.
Условия равновесия
Главный вектор и главный момент
Подчеркнем, что величина главного момента зависит от выбора центра, относительно которого вычисляются моменты.
Пространственная система сил
Основная форма условий равновесия
Условия равновесия системы сил
Для того, чтобы твердое тело под действием произвольной системы сил находилось в равновесии, необходимо и достаточно, чтобы главный вектор и главный момент, относительно произвольной точки C , равнялись нулю:
;
.
Здесь – точка приложения силы , .
Доказательство
Это основная форма условий равновесия. Точка C может, как принадлежать телу, так и находится за его пределами. Обычно центр C выбирают так, чтобы сделать вычисления более простыми. Спроектировав каждое из этих векторных уравнений на три направления, получим шесть уравнений, из которых можно определить шесть неизвестных величин.
Вторая форма условий равновесия
Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма моментов внешних сил, действующих на тело, относительно произвольным образом выбранных точек и равнялась нулю, и чтобы сумма проекций сил на произвольное направление, не перпендикулярное направлению , равнялась нулю:
;
;
.
Доказательство
Третья форма условий равновесия
Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма моментов внешних сил, действующих на тело, относительно произвольным образом выбранных точек и , не лежащих на одной прямой, равнялась нулю:
;
;
;
.
Доказательство
Плоская система сил
Все изложенное для пространственной системы сил является применимым и для плоской системы. Направим оси x и y декартовой системы координат в плоскости действия сил, а ось z – перпендикулярно. Тогда z компоненты координат точек и сил равны нулю: . Также равны нулю x, y компоненты моментов сил относительно произвольной точки C : . То есть момент может иметь отличное от нуля значение только для z компоненты. Поскольку z компонента не входит в плоскую систему координат xy , то, в двумерном пространстве, момент силы уже не является вектором, а является скаляром (точнее псевдоскаляром). Его называют алгебраическим моментом силы относительно центра C (или просто моментом силы относительно центра C ), и обозначают символом с маленькой буквы без знака вектора:
.
Величина является моментом силы относительно оси, проходящей через точку C перпендикулярно плоскости действия сил. Момент вычисляют как произведение модуля силы на плечо со знаком плюс или минус:
.
Если, при неподвижном центре C , сила стремится повернуть систему против часовой стрелки, то момент положителен . В противном случае – отрицательный: .
Величину момента от силы , приложенной в точке A , относительно центра C , также можно выразить через компоненты векторов по формуле:
,
где и – координаты точек A и C , соответственно.
Условия равновесия плоского тела
Для плоской системы сил можно составить три уравнения, из которых можно определить три неизвестных величины. Считаем, что сила приложена в точке .
Основная форма условий равновесия
;
;
.
Вторая форма условий равновесия
;
;
.
Третья форма условий равновесия
;
;
;
.
Связи и их реакции
Определения и свойства
Принцип освобождаемости
Всякое несвободное тело можно рассматривать как свободное, если действие связей заменить их реакциями, приложенными к телу.
Основные типы связей и их реакции
Плоские и пространственные задачи
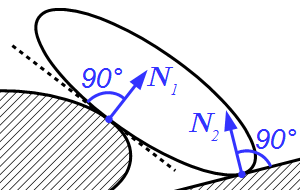
Две гладкие не острые поверхности. Через точку соприкосновения проводим касательную плоскость к этим поверхностям. Реакция является силой, направленной перпендикулярно этой плоскости, то есть, направлена по нормали к обеим поверхностям в точке их соприкосновения.
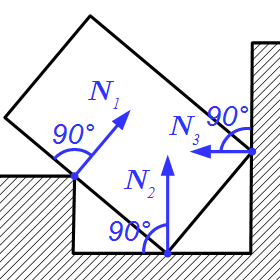
Одна из гладких поверхностей является острием. Реакция является силой, направленной вдоль нормали не острой поверхности в точке соприкосновения.
Две шероховатые поверхности. То же самое, что и для гладких поверхностей, только в точке соприкосновения добавляем силу трения, лежащую в плоскости касания.
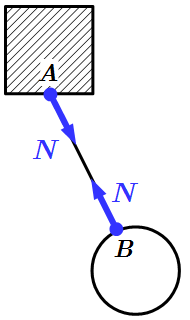
Невесомая нить и стержень. Реакция направлена вдоль нити или стержня. При этом на нить всегда действует сила растяжения. На стержень может действовать как растягивающая, так и сжимающая сила.
Плоские задачи
Следующие связи применяют только в плоских задачах.
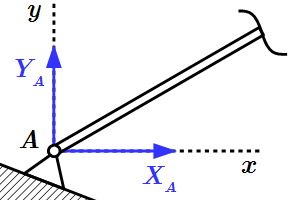
Неподвижный шарнир. Реакция является силой, проходящей через ось шарнира. Обычно ее раскладывают на две составляющие параллельно осям координат.
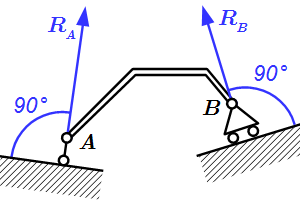
Подвижный шарнир, или опора на катках. Реакция является силой, которая проходит через ось шарнира перпендикулярно опорной поверхности.
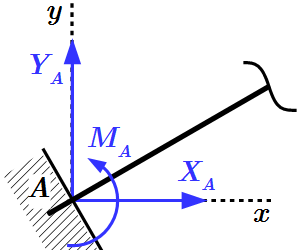
Заделка. Реакция состоит из силы, проходящей через точку соединения и момента относительно оси, проходящей через точку соединения перпендикулярно плоскости фигуры. Силу обычно раскладывают на две составляющие параллельно осям координат.
Пространственные задачи
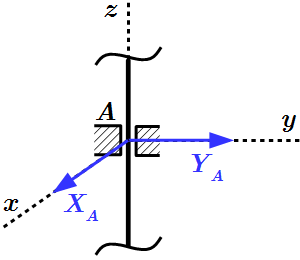
Цилиндрический шарнир или петля. Реакция является силой, проходящей через ось шарнира, перпендикулярно направлению оси. Обычно ее раскладывают на две составляющие параллельно осям координат.
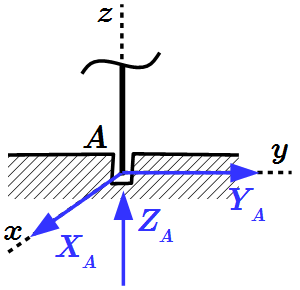
Сферический подшипник или подпятник. Реакция является силой, проходящей через центр подшипника. Обычно ее раскладывают на три составляющие параллельно осям координат.
![]()
Заделка. Реакция состоит из силы, проходящей через точку соединения и момента относительно этой точки. Силу и момент обычно раскладывают на три составляющие параллельно осям координат.
Силы трения
Трение скольжения
Рассмотрим тело, которое скользит по поверхности другого тела с отличной от нуля скоростью v под действием внешней силы . Если поверхности абсолютно гладкие, то в точках соприкосновения тел возникает только сила давления N , перпендикулярная плоскости соприкосновения тел. Для шероховатых поверхностей, возникает еще сила трения , параллельная плоскости соприкосновения, направленная в сторону, противоположную скорости движения. Величина силы трения пропорциональна силе давления и не зависит от площади соприкосновения поверхностей:
(Т1) .
Здесь f – безразмерный коэффициент, который называется динамическим коэффициентом трения, или коэффициентом трения скольжения. Он зависит от материалов и обработки соприкасаемых поверхностей и почти не зависит от скорости относительного движения. При расчетах его считают постоянной.
Сила трения скольжения – это сила трения, приложенная к точкам соприкосновения движущихся тел и параллельная плоскости их соприкосновения. То есть это сила, препятствующая скольжению одного тела по поверхности другого. При расчетах, под силой трения скольжения понимают равнодействующую всех сил трения, возникающих в точках соприкосновения тел.
Закон Амонта – Кулона
Сила трения скольжения направлена параллельно плоскости соприкосновения тел в сторону, противоположную их движению, которое возникло бы при отсутствии трения. Она не зависит от площади соприкосновения поверхностей, а зависит от силы давления N одной поверхности на другую, перпендикулярную плоскости соприкосновения тел:
.
Трение сцепления
Теперь рассмотрим статическую задачу. Пусть тело покоится, и на него действуют внешние силы с равнодействующей , приложенной под углом φ к нормали поверхности. Разложим ее на две составляющие: параллельную поверхности, и перпендикулярную . На тело также действуют сила реакции , перпендикулярная плоскости соприкосновения тел, и сила трения , которую при отсутствии скольжения называют силой сцепления. Сила сцепления направлена параллельно поверхности, препятствуя движению. Она может принимать значения от нуля до максимальной величины , определяемой аналогично (Т1):
(Т2) .
Здесь – статический коэффициент трения, который еще называют коэффициентом сцепления. Он не может быть меньше динамического коэффициента трения: .
Если , тело покоится. При этом сила трения сцепления меньше максимальной величины: . При , возникает движение. Когда , сила трения достигает предельной величины, возникает состояние предельного равновесия. Дальнейшее увеличение приводит к потере равновесия.
Сила трения сцепления – это сила трения скольжения, когда относительное перемещение соприкасающихся тел отсутствует.
Предельная сила трения – это максимальное значение силы трения сцепления.
Предельное равновесие – это состояние равновесия, при котором значение силы трения сцепления равно ее максимальному значению.
Из условий равновесия имеем: . Подставим в (Т2):
.
Отсюда получаем, что система будет находиться в равновесии, если
.
Видно, что условие равновесия зависит от угла φ , под которым приложена равнодействующая внешних сил, и не зависит от ее величины. Введем предельный угол трения: . Эту величину также называют просто углом трения. Тогда, условие равновесия можно записать так:
.
Это неравенство определяет конус в пространстве, который называется предельным конусом трения, конусом трения, или конусом сцепления. Если направление силы выходит за пределы этого конуса, то система начинает движение. Если направление силы попадает в конус сцепления, то система остается в состоянии покоя. Такое явление называется заклиниванием механизма.
Заклинивание механизма – это явление в механике, при котором система остается в состоянии покоя при любом, сколь угодно большом увеличении модуля внешней силы.
Условие возникновения движения при наличии трения
Для того чтобы тело начало движение, необходимо и достаточно, чтобы равнодействующая внешних сил находилась вне конуса трения.
Трение качения
Рассмотрим случай, когда одно из тел круглой формы катится без проскальзывания по поверхности другого. С точки зрения механики, такие тела соприкасаются в одной точке A . Площадь их соприкосновения бесконечно мала, в результате чего возникает бесконечно большое давление, которое не могут выдержать реальные материалы. Поэтому вблизи точки соприкосновения тел возникает деформация, которая имеет место только в небольшом участке соприкасающихся тел. В основной части тел, удаленных от точек соприкосновения, деформация практически отсутствует, и их можно рассматривать как абсолютно твердые тела. Тогда систему сил, возникающую в результате соприкосновения, можно привести к некоторой равнодействующей силе . При этом оказывается, что точка ее приложения смещена относительно оси симметрии катящегося тела. Это приводит к появлению момента сил относительно точки A , расположенной на оси симметрии круглого тела. Изучение деформированного состояния выходит за рамки теоретической механики. Поэтому мы приводим лишь результаты, применяемые в расчетах.
Расчетная схема трения качения.
1. Поскольку деформации, для небольших значений внешних сил малы, то, считают, что они не влияют на геометрические характеристики тел. То есть считают, что тела округлой формы соприкасаются в одной точке.
2. В точке соприкосновения, на тело действуют:
сила давления , перпендикулярная соприкасающимся поверхностям;
сила сцепления , лежащая в касательной плоскости, проходящей через точку соприкосновения поверхностей;
момент силы трения , препятствующий движению.
Максимальное значение момента силы трения определяется по формуле:
,
где δ – коэффициент трения качения, который имеет размерность длины.
3. Коэффициент трения качения зависит от соприкасающихся материалов и состояния их поверхностей. Он не зависит от кривизны поверхностей и угловой скорости вращения тела. А при движении с проскальзыванием, не зависит от скорости скольжения.
Центр тяжести тела
Центр тяжести в пространстве
Пусть тело состоит из n материальных точек. И пусть на каждую точку Bi действует сила тяжести , . Все силы тяжести, действующие на точки, параллельны. Поэтому мы имеем дело с параллельной системой сил. Как и для системы из двух однонаправленных сил, такая система сил имеет равнодействующую. Найдем ее.
Пусть – главный вектор. Поскольку все силы имеют одинаковое направление, то введем единичный вектор , направленный вдоль сил:
. Отсюда .
Найдем момент сил тяжести относительно произвольно расположенного центра O .
,
где
(ЦТ1) .
Отсюда видно, что формула вычисления момента имеет вид формулы момента от одной силы , приложенной в точке C . Точка C , положение которой определяется формулой (ЦТ1), называется центром тяжести тела. Таким образом, равнодействующая отдельных сил тяжести точек тела равна главному вектору силы тяжести, приложенному в центре тяжести. Модуль P равнодействующей называют весом тела.
Если бы мы находили равнодействующую сил тяжести, выполняя эквивалентные преобразования сил, то мы бы нашли только линию действия равнодействующей. Далее, если повернуть тело на некоторый угол, то можно найти другую линию действия равнодействующей. При этом все, подобным образом построенные линии, пересекаются в одной точке, которая и является центром тяжести тела.
Центр тяжести твердого тела – это точка, связанная с телом, через которую проходит линия действия равнодействующей сил тяжести частиц тела, при любом положении тела в пространстве.
Вес тела – это абсолютное значение равнодействующей сил тяжести частиц, составляющих тело.
Координаты центра тяжести определяются по формулам:
(ЦТ2) .
Здесь – абсолютное значение равнодействующей сил тяжести, или вес тела. – координаты точек тела. Эти формулы также можно записать в векторном виде.
.
Центр тяжести C связан с телом. Однако его положение может находиться за его пределами. Например, при наличии полости.
В случае, когда силы имеют другое происхождение, но также имеют одинаковое направление, то мы имеем дело с системой параллельных сил. В этом случае, точка C называется центром параллельных сил.
Для сплошного однородного тела, мы от суммирования переходим к интегрированию. Элементарная сила тяжести выражается через плотность ρi элементарной частицы тела, массой , и занимающей объем :
.
Здесь g – ускорение свободного падения. Переходя от суммированию к интегрированию, имеем:
(ЦТ3) .
Центр тяжести плоской фигуры
Рассмотрим плоскую фигуру. Выберем двумерную систему координат Oxy . Тогда положение центра тяжести определяется по тем же формулам (ЦТ2) и (ЦТ3), из которых нужно убрать переменную z .
Однородная фигура
Рассмотрим плоскую однородную фигуру. Для такой фигуры, плотность ρ является постоянной; сила тяжести Δpi элементарной частицы пропорциональна площади ΔAi этой частицы: Δpi = ρΔAig . Вес P фигуры пропорционален площади A всей фигуры: P = ρAg .
Подставляя эти величины в формулы, определяющие положение центра тяжести находим:
.
Переходим от суммирования к интегрированию:
.
Мы видим, что сюда не входят плотность ρ и ускорение свободного падения g . Остались величины, зависящие только от геометрии сечения. Таким образом, для тела с постоянной плотностью, центр тяжести является геометрической характеристикой.
В этих формулах, yC есть алгебраическое расстояние от центра тяжести до оси x ; yk или y – алгебраическое расстояние элементарного участка до той же оси. xC , xk и x – соответствующие алгебраические расстояния до оси y . В этой связи вводят новую геометрическую характеристику сечения, которую называют статическим моментом.
Статический момент относительно некоторой оси – это сумма произведений элементарных площадей , входящих в состав фигуры, на алгебраические значения их расстояний до этой оси.
В рассматриваемом нами случае, статические моменты относительно осей x, y определяются по формулам:
.
Статические моменты широко используются при расчете конструкций. Для стандартных профилей, их значения указываются в соответствующих справочниках.
Центры тяжести простейших фигур
Параллелограмм, прямоугольник, квадрат: в точке пересечения диагоналей.
Треугольник: в точке пересечения медиан, которая делит каждую медиану в соотношении 1:2.
Дуга окружности с центральным углом 2α: .
Круговой сектор: .
Теоремы, применяемые при расчете центра тяжести
Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси.
Если однородное тело имеет плоскость симметрии, то его центр тяжести находится в этой плоскости.
Центр тяжести фигуры, составленной из n более простых фигур, определяется по формуле:
(ЦТ4) .
Здесь – площадь всей фигуры; – площадь и координаты центра тяжести простой фигуры, входящей в состав сложной.
Способ отрицательных площадей (объемов)
Если k — я фигура вырезана из объемлющей ее части, то, в формуле (ЦТ4), соответствующая ей площадь считается отрицательной: .
Распределенная нагрузка
Силу тяжести протяженных тел, на схемах, изображают в виде эпюр. Также встречаются подобные силе тяжести параллельные силы, приложенные не в определенных точках тела, а непрерывно распределенные по его поверхности или объему. Такие силы называют распределенными силами или распределенными нагрузками.
Равномерно распределенная нагрузка q (рисунок А). Ее можно заменить равнодействующей силой величины , приложенной в центре тяжести эпюры. Поскольку, на рисунке А, эпюра представляет собой прямоугольник, то ее центр тяжести находится в центре основания эпюры – в точке C : | AC | = | CB | .
Линейно распределенная нагрузка q (рисунок В). Ее также можно заменить равнодействующей. Величина равнодействующей равна площади эпюры:
.
Точка приложения находится в центре тяжести эпюры. Центр тяжести треугольника, высотой h , находится на расстоянии от основания. Поэтому .
Приведение системы сил к центру
Теорема о параллельном переносе силы (лемма Пуансо)
Сила, действующая на данное тело, эквивалентна силе, полученной параллельным переносом исходной силы в любую точку тела и паре сил с моментом, равным моменту исходной силы относительно новой точки ее приложения.
Теорема о приведении системы сил к заданному центру
Любую систему сил, действующих на данное тело, можно привести к заданному центру O – то есть заменить одной силой, равной главному вектору, приложенной к точке приведения O , и парой сил с моментом MO , равным главному моменту относительно центра O .
Статические инварианты
Такими инвариантами являются:
1) главный вектор ;
2) скалярное произведение главного вектора на главный момент .
Главный вектор равен векторной сумме всех сил и поэтому не зависит от центра приведения O . Главный момент зависит от положения центра O , относительно которого вычисляются моменты. Но величина его скалярного произведения на главный вектор не зависит от того, относительно какой точки вычисляется главный момент.
Хотя главный вектор не зависит от положения центра O , но величины его проекций на оси координат зависят от выбора системы координат. Поэтому они также не являются инвариантами. По той же причине и направление главного вектора не является инвариантом. Единственной численной величиной, которая не зависит от выбора системы координат, является модуль главного вектора. Но, в математическом отношении, проще иметь дело с квадратом модуля. Поэтому мы выберем его в качестве основного инварианта.
Итак, статическими инвариантами являются следующие величины:
– квадрат модуля главного вектора;
– скалярное произведение главного вектора на главный момент. Инвариантами также являются функции от инвариантов. Например, проекция главного момента на направление главного вектора является инвариантом:
.
Динама
Разложим главный момент на компоненту , параллельную главному вектору , и на компоненту , перпендикулярную :
(П1) .
Тогда .
Отсюда получаем упомянутый выше результат, что инвариантом является алгебраическая величина проекции главного момента на направление главного вектора:
.
Динама – одна из простейших систем сил.
То есть, при изменении положения центра O , меняется вектор , в то время как вектор остается постоянным. Выбором центра приведения O , можно обратить в нуль. Тогда мы получим систему, состоящую из главного вектора и пары сил с моментом , лежащих в плоскости, перпендикулярной главному вектору. Такая система называется динамой или силовым винтом. Система приводится к динаме, если второй статический инвариант не равен нулю.
Динама – это простейшая система сил, состоящая из силы , приложенной к некоторой точке C , и паре сил, перпендикулярных . При этом момент пары параллелен линии действия силы. Динаму также называют силовым винтом, динамическим винтом, или статическим винтом.
Ось винта – это линия действия силы динамического винта.
Из (П1) мы находим, что минимальное значение модуля момента равно модулю его проекции на направление главного вектора:
.
Центральная ось системы сил
Пусть и – главный вектор и главный момент относительно некоторого центра O , который выберем за начало координат. И пусть второй инвариант отличен от нуля:
.
Найдем положение такой точки C , относительно которой система сил приводится к динаме. Для этого преобразуем главный момент от центра O к C :
.
Отсюда
(П2) .
Для динамы, векторы и направлены вдоль одной прямой. Поэтому
, где λ – некоторое число. Отсюда получаем два уравнения:
(П3) .
Пусть – компоненты вектора . Тогда подставив (П2) в (П3), имеем:
.
Это уравнение прямой в пространстве, которую называют центральной осью системы сил. Относительно точек этой прямой, система сил приводится к динаме, а главный момент имеет наименьшее по модулю значение.
Центральная ось системы сил – это прямая, обладающая тем свойством, что при приведении системы сил к любой из ее точек, система сил является динамой. При этом главный вектор и главный момент динамы параллельны этой прямой, а главный момент имеет наименьшее по модулю значение.
Приведение системы сил к простейшему виду
Пара сил
Пусть .
Тогда . Второй инвариант также равен нулю: . В этом случае, вектор главного момента не зависит от положения центра O . Система сил приводится к паре с моментом .
Если и , то это уравновешенная система сил. Она эквивалентна отсутствию сил.
Равнодействующая сила
Пусть .
В этом случае существует прямая, относительно точек которой главный момент равен нулю:
.
То есть система приводится к одной силе – равнодействующей, равной главному вектору приложенному к любой из точек упомянутой выше прямой. Эта прямая является линией действия главного вектора. Примеры: система сходящихся сил, система параллельных сил. Это системы, которые имеют равнодействующую.
Динама
При , как показано выше, система сил приводится к динаме.
Использованная литература:
А. А. Яблонский, В.М. Никифорова. Курс теоретической механики, часть 1, статика, кинематика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 03-10-2017 Изменено: 07-05-2020
http://www.evkova.org/aksiomyi-i-teoremyi-statiki-v-teoreticheskoj-mehanike
http://1cov-edu.ru/mehanika/statika/