Структура множества решений системы линейных уравнений
Векторная запись системы уравнений. Теорема Кронекера – Капелли о совместности системы линейных уравнений. Размерность пространства решений однородной системы линейных уравнений. Структура множества решений системы линейных уравнений. Теорема о выборе главных и свободных неизвестных.
Линейные операторы
Матрица линейного оператора. Преобразование матрицы линейного оператора при замене базиса. Собственные векторы и собственные значения линейного оператора. Приведение матрицы линейного оператора к диагональному виду. Характеристический многочлен линейного оператора. О корнях характеристического многочлена линейного оператора. Свойства собственных векторов с равными и различными собственными значениями.
Линейные, билинейные и квадратичные формы
Формула линейного функционала. Матрица билинейной формы. Матрица симметричной билинейной формы. Преобразование матрицы билинейной формы при замене базиса. Единственность симметричной билинейной формы, порождающей квадратичную форму. Критерий Сильвестра положительной определенности квадратичной формы. Закон инерции для квадратичных форм.
Элементы аналитической геометрии
Прямоугольная система координат на плоскости. Расстояние между точками. Деление отрезка в данном отношении. Векторы. Равенство векторов. Координаты вектора. Сложение векторов. Умножение вектора на число. Разложение вектора плоскости по двум неколлинеарным векторам. Скалярное произведение векторов. Общее уравнение прямой на плоскости. Условие параллельности и перпендикулярности прямых. Параметрическое и каноническое уравнения прямой. Расстояние от точки до прямой. Преобразование координат точки при замене системы координат. Разложение вектора по трем некомпланарным векторам. Векторное произведение векторов. Смешанное произведение векторов. Общее уравнение плоскости. Условие параллельности и перпендикулярности плоскостей. Уравнение прямой в пространстве. Взаимное расположение прямой и плоскости, двух прямых. Кривые второго порядка. Окружность. Эллипс. Парабола. Гипербола.
Евклидовы пространства
Скалярное произведение. Неравенство Коши – Буняковского. Неравенство треугольника. Длина вектора и угол между векторами. Ортогональность векторов. Независимость попарно ортогональных векторов. Ортогональная проекция вектора на подпространство. Построение ортонормированного базиса ортогонализацией произвольного базиса. Матрица скалярного произведения в ортонормированном базисе. Ортогональные матрицы. Геометрическая интерпретация ортогональных матриц.
Самосопряженные операторы
Сопряженность операторов в евклидовом пространстве. Матрицы сопряженных операторов. Собственные векторы и собственные значения самосопряженных операторов. Ортонормированный базис из собственных векторов самосопряженного оператора. Приведение квадратичной формы к каноническому виду.
Аффинные пространства
Преобразование координат точки при замене системы координат. Линейные отображения. Линейные операторы, связанные с линейными отображениями. Геометрические свойства линейных отображений. Аффинные и изометрические отображения.
Методические указания
Указания составлены в соответствии с учебниками [1, 2, 3]
1. Данко П.Е., Попов А.Г., Кожевникова Т.Я. Высшая математика в упражнениях и задачах: Уч. пособие для вузов. Ч.1,2.-М.: ОНИКС 21 век, 2002
2.Кремер Н.Ш. Высшая математика для экономистов: Учебник для вузов. — 2-е изд., перераб. и доп.-М.: ЮНИТИ, 2004
3.Кремер Н.Ш. Практикум по высшей математике для экономистов: Учеб. пособие для вузов. — М.: ЮНИТИ — ДАНА , 2005
Задача №1
Решить матричное уравнение Х- 4·Е=В·А- 2·В, если
А=  В= В=  |
Для нахождения элементов неизвестной матрицы выполним действия сложения, вычитания, умножения матриц и умножения их на число.
Матрицу с неизвестными оставим в левой части уравнения, остальные матрицы перенесем в правую часть меняя знак, и выполним все действия с матрицами.
1. Выполним умножение матриц (§ 1.2. главы 1 [2]).
В·А=  · =
· = 
2. Найдем матрицы 2·В и 4·Е (§ 1.2. главы 1 [2]).
2·В=2·  =
= 
4·Е=4· 
3. Выполним сложение и вычитание матриц в правой части:
Х=  —
—  +
+  =
=  .
.
Ответ:  .
.
Задача №2
Решить систему линейных уравнений двумя способами: методом Крамера и методом обратной матрицы.
 2х1 + х2 +х3 = 7,
2х1 + х2 +х3 = 7,
Рассмотрим решение системы линейных уравнений первым способом: методом Крамера.
Пусть А — матрица коэффициентов при неизвестных, Х- матрица – столбец неизвестных и В- матрица – столбец свободных членов:
А=  ; Х=
; Х=  ; В=
; В=  .
.
Найдем определитель системы  =
=  по формуле 1.4 § 1.3. главы 1 [2].
по формуле 1.4 § 1.3. главы 1 [2].
= = 2·(-1)·6 + 4·(-3)·1 + 8·1·6 – (8·(-1)·1+ 4·1·6 +2·(-3)·3) = 2. Так как 
 0, то по теореме Крамера система имеет единственное решение.
0, то по теореме Крамера система имеет единственное решение.
Вычислим определители матриц  , полученных из матрицы А, заменой соответственно первого, второго и третьего столбцов столбцом свободных членов:
, полученных из матрицы А, заменой соответственно первого, второго и третьего столбцов столбцом свободных членов:
 .
.
Теперь по формулам Крамера ( формула 2.8 § 2.1. главы 2 [2])
 ;
;  ;
;  ,
,
т.е. решение системы  .
.
Теперь рассмотрим второй способ решения системы: метод обратной матрицы.
Левую часть системы можно записать в виде произведения матриц А·Х, а правую – в виде матрицы В. Следовательно, имеем матричное уравнение
А·Х=В. ( 
Решить матричное уравнение — это значит найти неизвестные матрицы X , т.е. найти все элементы этой матрицы таким образом, чтобы при подстановке их в уравнение ( они обратились в верное равенство.
При решении матричных уравнений поступают так же, как при решении алгебраических, т.е. преобразуют уравнения так, чтобы получить при неизвестном коэффициент, равный 1. Так как нет действия деления матриц, а роль единицы у матриц играет единичная матрица, то вся задача сводится к тому, чтобы получить при неизвестных матрицах единичные, а для этого нужно использовать обратную матрицу.
Для получения единичной матрицы при X нужно умножить обе части уравнения ( на A -1 , а так как произведение матриц не подчиняется коммутативному закону, то A и A -1 должны быть рядом, поэтому можно умножить обе части уравнения (  на A -1 слева:
на A -1 слева:
 ,
,
так как E×X=X, то получим формулу для решения матричного уравнения ( :
Найдем матрицу, обратную матрице А.
1. Вычислим определитель матрицы A.
 .
.
2. Найдем присоединенную матрицу для A. Алгебраические дополнения находятся для строк, а пишутся в столбцы, т.е. сразу производится транспонирование матрицы алгебраических дополнений, используя формулу  (формула 1.8 § 1.3. главы 1 [2]).
(формула 1.8 § 1.3. главы 1 [2]).
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  .
.
Присоединенная матрица  .
.
3. Найдем обратную матрицу по формуле:
 .
.
4. Найдем X по формуле:
X= A -1 ×B 

 .
.
Чтобы убедиться в правильности решения, нужно сделать проверку, подставив найденные значения в уравнения системы, и убедиться в том, что они обращаются в верные равенства.
Ответ:  .
.
Задача 3
Исследовать данную систему уравнений на совместность и решить ее, если она совместна.
а)  б)
б)  в)
в) 
а) Вычислим ранги обычной и расширенной матриц системы, для этого преобразуем расширенную матрицу системы.













 .
.
Ранг матрицы r (A) = 3 (т.к. чисто нулевую последнюю строку нужно выбросить, и максимальный порядок отличного от нуля минора ее равен 3. У матрицы  есть в запасе еще один столбец — столбец свободных членов. Если его поменять местами с четвертым, то слева будет выделен минор 4-го порядка, отличный от нуля, поэтому r (
есть в запасе еще один столбец — столбец свободных членов. Если его поменять местами с четвертым, то слева будет выделен минор 4-го порядка, отличный от нуля, поэтому r (  ) = 4.
) = 4.
 .
.
Так как ранги матриц A и не равны r(A)¹ r( ), то система несовместна, т.е. не имеет решений по теореме Кронекера – Капелли (§ 2.4. главы 2 [2]).
Пояснения к вычислению ранга:
1. При первом преобразовании (1) переставить местами 1-й столбец с четвертым.
2. При втором (2) преобразовании 1-ю строку, умноженную на (-2), прибавить ко 2-й, затем 1-ю строку, умноженную на (-1), прибавить к 3-й, а затем ее же прибавить к 4-й. (При этом сама первая строка не меняется).
3. При третьем преобразовании (3) переставить местами второй и четвертый столбцы матрицы.
4. При четвертом преобразовании (4) умножить вторую строку на (-1) и поменять местами с третьей.
5. При пятом преобразовании (5) вторую строку умножить на число 5 и прибавить к третьей, а затем умножить на число 9 и прибавить к четвертой.
6. При шестом преобразовании четвертую строку умножить на (-3) и прибавить к ней третью строку, умноженную на 11.
Замечание
Эти преобразования не являются единственными. Можно работать с другими столбцами и строками.
Ответ: решения нет.
б) 
Вычислим сразу ранг расширенной матрицы, т.к. обычная матрица входит в нее.






 .
.
Матрица A приведена к треугольному виду, ее определитель ¹0, следовательно, ранг матрицы А равен 3. r(A)=3. Но так как матрица A входит в расширенную, то в расширенной матрице также выделен минор 3-го порядка ¹0 (этот минор совпадает с определителем матрицы А), и ранг расширенной матрицы также равен 3., т.е. r(A)=r  =3.
=3.
А так как ранг расширенной матрицы равен рангу матрицы системы и он равен числу неизвестных в этой системе, то система совместна и имеет единственное по теореме Кронекера – Капелли (§ 2.4. главы 2 [2]).
Пояснения к вычислению ранга:
1.При первом (1)преобразовании к элементам второй строки прибавить элементы первой, умноженные на (-2), а затем к элементам третьей строки прибавить элементы первой, умноженные на (-1).
2. При втором преобразовании (2)переставить местами второй и третий столбцы матрицы.
3.При третьем преобразовании (3)элементы второй строки прибавить к элементам третьей.
Итак, в результате этих преобразований получили систему уравнений
 откуда, используя обратный ход метода Гаусса, найдем из третьего уравнения
откуда, используя обратный ход метода Гаусса, найдем из третьего уравнения  ; из второго уравнения
; из второго уравнения  и из первого уравнения
и из первого уравнения  . Решение системы (1;2;3).
. Решение системы (1;2;3).
в) 
Так как в данной системе число уравнений меньше числа неизвестных, то система не может иметь единственного решения, она либо несовместна, либо имеет множество решений. Выпишем расширенную матрицу и выполним эквивалентные преобразования.








 .
.
Пояснения к решению:
1. Переставить местами 1-й и 4-й столбцы.
2. Первую строку умножить на (-2), затем на (-7) и прибавить ко 2-й и к 3-й строкам.
3. Умножить вторую строку на (-1), третью разделить на (-5). Получилось две одинаковых строки.
4. Выбросить одну из одинаковых строк.
В матрице не получилось противоречивой строки, значит система совместна и имеет множество решений, так как число строк меньше числа неизвестных по теореме Кронекера – Капелли (§ 2.4. главы 2 [2]).
Система, соответствующая последней матрице, имеет вид:

В качестве основных неизвестных можно взять неизвестные, соответствующие столбцам отличного от нуля минора 2-го порядка, приведенного к треугольному виду , остальные неизвестные перенести в правую часть.

 подставить x2 в x4.
подставить x2 в x4.
 — множество решений.
— множество решений.
Если придавать различные значения неизвестным x1 и x3, то каждый раз будут получаться новые значения неизвестных x2 и x4, те новые решения.
Пусть 
Замечания. Это не единственные формулы общего решения. Если над расширенной матрицей выполнить другие эквивалентные преобразования, то формулы для общего решения получатся другие.
Ответ: 
В ромбе ABCD известны координаты вершин А и С и тангенс внутреннего угла С. Найти уравнения диагоналей и сторон, координаты двух других вершин, а также площадь этого ромба, если А(1,10), С(7,2),  . Сделать чертеж.
. Сделать чертеж.
Изобразим графически положение ромба в прямоугольной системе координат ХОУ:
 |
Зная координаты вершин А и С запишем уравнение диагонали АС как уравнение прямой,
Рисунок 1 – Схематичный чертеж
проходящей через две заданные точки:  ;
; 
В форме общего уравнения прямой оно примет вид
а в форме уравнения прямой с угловым коэффициентом перепишется как
 , откуда КАС =
, откуда КАС = 
Так как в ромбе диагонали взаимно перпендикулярны, то угловой коэффициент диагонали BD будет равен КВD = 

Само же уравнение диагонали BD найдем как уравнение прямой, проходящей через заданную точку в направлении, определяемом угловым коэффициентом КBD.
В качестве «заданной точки» возьмем точку Е пересечения диагоналей ромба, которая лежит на середине отрезка АС, вследствие чего: 

 Е (4,6)
Е (4,6)
Итак, уравнение диагонали BD запишем в виде у – 6 = (х – 4),
Откуда у = х + 3 или 3х – 4у + 12 = 0.
Чтобы найти уравнение сторон ромба, надо определить только угловые коэффициенты КАВ = КCD и КВС = КAD прямых, на которых эти стороны лежат, ибо точки, через которые эти прямые проходят, известны – это вершины А и С ромба.
Для определения указанных угловых коэффициентов воспользуемся формулой:
 (*)
(*)
позволяющей вычислять тангенс угла φ между двумя заданными прямыми по их угловым коэффициентам К1 и К2; при этом угол φ отсчитывается против часовой стрелки от прямой у = К1х + b1 до прямой у = К2х + b2. Формула (*) оказывается удобной, потому что уравнение диагонали АС уже найдено (и, следовательно, известен ее угловой коэффициент КАС), а положение сторон ромба относительно этой диагонали однозначно определяется внутренними углами А и С, которые равны между собой и для которых по условию известен их тангенс (  ).
).
Так диагонали ромба делят его углы пополам, то, положив  (рисунок 1), из формулы
(рисунок 1), из формулы  для тангенса двойного угла при tg 2φ = 4/3 найдем tg φ:
для тангенса двойного угла при tg 2φ = 4/3 найдем tg φ:

Положим z = tg φ; тогда  , откуда 2z 2 + 3z – 2 = 0;
, откуда 2z 2 + 3z – 2 = 0;
корнями этого квадратного уравнения являются z1 =  и z2 = -2; но так как угол φ в ромбе всегда острый, корень z2 = -2 отбрасываем и получаем в итоге, что tg φ = .
и z2 = -2; но так как угол φ в ромбе всегда острый, корень z2 = -2 отбрасываем и получаем в итоге, что tg φ = .
Угол φ является углом между прямыми ВС и АС, с одной стороны, и прямыми АС и CD – с другой (рисунок 1).
Потому в первом случае по формуле (*) имеем

, откуда при КАС =  находим КВС =
находим КВС =  .
.
Во втором случае по формуле (*) имеем


 ½ = , откуда при КАС = — находим КCD = — .
½ = , откуда при КАС = — находим КCD = — .
Так как противоположные стороны ромба параллельны, то тем самым мы определили угловые коэффициенты всех его сторон.
Зная теперь эти угловые коэффициенты и координаты вершин А и С, по уже использовавшимся выше формулам найдем уравнения прямых АВ, CD, BC и AD.
Уравнение АВ: у – 10 = — ½ (х – 1), откуда х + 2у – 21 = 0.
Уравнение CD: у – 2 = — ½ (х – 7), откуда х + 2у – 11 = 0.
Уравнение ВС: у – 2 = — 11/2 (х – 7), откуда 11х + 2у – 81 = 0.
Уравнение AD: у – 10 = — 11/2 (х – 1), откуда 11х + 2у – 31 = 0.
Вершины ромба являются точками пересечения его соответствующих сторон. Поэтому их координаты найдем путем совместного решения уравнений этих сторон.
 Для вершины В:
Для вершины В:
 Для вершины D:
Для вершины D:
Координаты этих точек удовлетворяют ранее найденному уравнению
3х – 4у + 12 = 0 диагонали BD, что подтверждает их правильность. Уточним теперь положение точек В и D на чертеже и завершим построение последнего.
Площадь ромба вычислим по формуле S = ½ d1d2, где d1 и d2 – диагонали ромба.
Полагая d1 = |АС|, а d2 = |BD|, длины этих диагоналей найдем как расстояния между соответствующими противоположными вершинами ромба:
d1 = 
d2 = 
В итоге площадь ромба будет равна S = ½ ∙ 10 ∙ 5 = 25 кв.ед.
Система линейных уравнений. Общее решение
Система линейных уравнений (СЛУ) может быть записана в виде
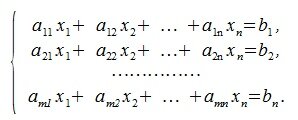
где m, n натуральные числа, aij (i= 1,2, . m, j= 1,2. n) называются коэффициентами, bi (i= 1,2. m) называются свободными членами, xi (i= 1,2. n) называются неизвестными.
Систему линейных уравнений (1) можно записать в виде
где A матрица порядка m×n , x — вектор порядка n (x∈R n ), b — вектор порядка m (b ∈R m ).
Решением системы (2) называется выбор такого вектора x’, что выполнено равенство
Если система линейных уравнений имеет хотя бы одно решение, то СЛУ называется совместным.
Если СЛУ не имеет решения, то СЛУ называется несовместным.
Если СЛУ имеет единственное решение, то СЛУ называется определенным.
Если СЛУ имеет более одного решения, то СЛУ называется неопределенным.
Система линейных уравнений (2) называется неоднородной cистемой линейных уравнений, если b≠0.
Система линейных уравнений (2) называется однородной cистемой линейных уравнений, если b=0.
Нахождение общего решения системы линейных уравнений
Общее решение системы линейных уравнений (1)((или (2))− это множество всех решений этой системы.
Пусть A m×n — матрица rankA=r. В общем случае можем предположить что r 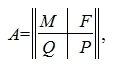
 .
.
Применяя метод исключения Гаусса для системы (3), получим:
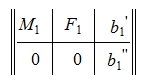
где M1 верхняя треугольная матрица, 0 — нулевые матрицы соответствующих порядков. Далее, применяя обратный ход исключения Гаусса, и, далее, разделив элементы каждой строки на ведущий элемент этой строки (если ведущий элемент существует) получим:

где E — единичная матрица порядка r×r.
Запишем (5) в виде системы линейных уравнений:
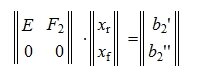
где 
Решим систему линейных уравнений (6). Для этого перезапишем в следующем виде:
Из второго уравнения системы (7) следует, что для совместности системы (6) и, следовательно, (2) (или (1)) должно выполняться условие b2»≡ 0. Если система совместна, то решаем первое уравнение системы (7) относительно вектора xr:
 | (8) |
Таким образом первые r координаты вектора x  выражены через остальные координаты
выражены через остальные координаты  . — свободные координаты, т.е. могут принимать любые значения.
. — свободные координаты, т.е. могут принимать любые значения.
Найдем, далее, множество всех векторов x, удовлетворяющих уравнению (6) и, следовательно, (2)( или (1)).
Рассмотрим множество всех векторов х, удовлетворяющих условию
 | (9) |
где λ — произвольный вектор-столбец длины n-r.
Подставляя (9) в (6) получим:



Следовательно (9) является решением системы (6) и, следовательно, (2)(или (1)). Отметим что вектор  является частным решением неоднородной системы линейных уравнений Ax=b, а
является частным решением неоднородной системы линейных уравнений Ax=b, а  является общим решением однородной системы линейных уравнений Ax=0;
является общим решением однородной системы линейных уравнений Ax=0;
Нахождение общего решения системы линейных уравнений с помощью псевдообратной матрицы
Обозначим через R(A) пространство столбцов матрицы A, т.е.
1. Пусть A n×n матрица и rank(A)=n. Тогда существует обратная к A матрица A -1 , и следовательно единственное решение СЛУ (2) примет вид:
Действительно, подставляя (3) в (2) имеем:
2. Пусть A m×n − матрица, rank(A)=r.
Решение задач по математике онлайн
//mailru,yandex,google,vkontakte,odnoklassniki,instagram,wargaming,facebook,twitter,liveid,steam,soundcloud,lastfm, // echo( ‘
Калькулятор онлайн.
Решение систем линейных алгебраических уравнений (СЛАУ)
Метод Гаусса, матричный метод, метод Крамера, исследование на совместность (теорема Кронекера-Капелли), определение количества решений, нахождение нормальной фундаментальной системы решений.
С помощью данной математической программы вы можете решить и исследовать систему линейных алгебраических уравнений (СЛАУ).
Программа не только даёт ответ задачи, но и приводит подробное решение с пояснениями шагов решения.
Данная программа может быть полезна учащимся старших классов общеобразовательных школ при подготовке к контрольным работам и экзаменам, при проверке знаний перед ЕГЭ, родителям для контроля решения многих задач по математике и алгебре. А может быть вам слишком накладно нанимать репетитора или покупать новые учебники? Или вы просто хотите как можно быстрее сделать домашнее задание по математике или алгебре? В этом случае вы также можете воспользоваться нашими программами с подробным решением.
Таким образом вы можете проводить своё собственное обучение и/или обучение своих младших братьев или сестёр, при этом уровень образования в области решаемых задач повышается.
Ввод дробного числа в виде десятичной дроби.
При вводе десятичной дроби, целую часть от дробной части можно отделять точкой или запятой :
Ввод: -2.34
Результат: \( -2<,>34 \)
Ввод: -1,15
Результат: \( -1<,>15 \)
Ввод дробного числа в виде обыкновенной дроби.
В качестве числителя, знаменателя и целой части дроби может выступать только целое число.
Знаменатель не может быть отрицательным.
При вводе числовой дроби числитель отделяется от знаменателя знаком деления: /
Ввод: -2/3
Результат: $$ -\frac<2> <3>$$
Целая часть отделяется от дроби знаком амперсанд: &
Ввод: 5&8/3
Результат: $$ 5\frac<8> <3>$$
Помните, что на ноль делить нельзя!
RND CFracNum Fill RND int Fill Start MathJax
Сюда ввести строку с GET параметрами :
Немного теории.
Системы линейных алгебраических уравнений
Основные определения
Система \(m\) линейных алгебраических уравнений с \(n\) неизвестными (сокращенно СЛАУ) представляет собой систему вида
\( \left\< \begin
Уравнения системы называют алгебраическими потому, что левая часть каждого из них есть многочлен от \(n\) переменных \( x_1 , \ldots x_n \), а линейными потому, что эти многочлены имеют первую степень.
Числа \(a_
СЛАУ называют однородной, если \( b_1 = b_2 = \ldots = b_m = 0 \). Иначе её называют неоднородной.
Решением СЛАУ, да и вообще всякой системы уравнений, называют такой набор значений неизвестных \( x_1^\circ, \ldots , x_n^\circ \), при подстановке которых каждое уравнение системы превращается в тождество. Любое конкретное решение СЛАУ также называют её частным решением.
Решить СЛАУ — значит решить две задачи:
— выяснить, имеет ли СЛАУ решения;
— найти все решения, если они существуют.
СЛАУ называют совместной, если она имеет какие-либо решения. В противном случае её называют несовместной. Однородная СЛАУ всегда совместна, поскольку нулевой набор значений её неизвестных всегда является решением.
Если СЛАУ (1) имеет решение, и притом единственное, то её называют определенной, а если решение неединственное — то неопределенной. При \(m=n\), т.е. когда количество уравнений совпадает с количеством неизвестных, СЛАУ называют квадратной.
Формы записи СЛАУ
Кроме координатной формы (1) записи СЛАУ часто используют и другие её представления.
Рассматривая коэффициенты \(a_
\( \begin
или, обозначая столбцы соответственно \( a_1 , \ldots , a_n , b \),
\( x_1 a_1 + x_2 a_2 + \ldots + x_n a_n = b \tag <2>\)
Таким образом, решение СЛАУ (1) можно трактовать как представление столбца \(b\) в виде линейной комбинации столбцов \( a_1, \ldots, a_n \). Соотношение (2) называют векторной записью СЛАУ.
Поскольку \(A \;,\; X\) и \(B\) являются матрицами, то запись СЛАУ (1) в виде \(AX=B\) называют матричной. Если \(B=0\), то СЛАУ является однородной и в матричной записи имеет вид \(AX=0\).
Приведенные рассуждения показывают, что задачи :
а) решения СЛАУ (1)
б) представления столбца в виде линейной комбинации данных столбцов
в) решения матричных уравнений вида \(AX=B\)
являются просто различной формой записи одной и той же задачи.
Критерий совместности СЛАУ
«Триединство» форм записи СЛАУ позволяет легко получить критерий совместности СЛАУ. Напомним, что содержательный смысл это понятие имеет для неоднородных СЛАУ (однородные СЛАУ всегда совместны).
Матрицу
\( A = \begin
называют матрицей (коэффициентов) СЛАУ (1), а матрицу
\( (A|B) = \left( \begin
расширенной матрицей СЛАУ (1). Расширенная матрица полностью характеризует СЛАУ. Это означает, что по этой матрице однозначно (если сохранить обозначения для неизвестных) восстанавливается сама СЛАУ.
Теорема Кронекера-Капелли. Для совместности СЛАУ \(AX=B\) необходимо и достаточно, чтобы ранг её матрицы \(A\) был равен рангу её расширенной матрицы \( (A|B) \).
Формулы Крамера
Теорема. СЛАУ с квадратной невырожденной матрицей имеет решение, и притом единственное, которое определяется по формулам Крамера :
$$ x_i = \frac<\Delta_i> <|A|>\;,\quad i=\overline <1,n>\tag <3>$$
где \(\Delta_i\) — определитель матрицы, получающейся из матрицы \(A\) заменой \(i\)-го столбца на столбец свободных членов.
Следствие. Однородная СЛАУ с квадратной невырожденной матрицей имеет единственное решение — нулевое.
Если матрица СЛАУ не является квадратной невырожденной, то формулы Крамера не работают и приходится использовать другие методы нахождения решений.
Однородные системы
Теорема. Если столбцы \( X^<(1)>, X^<(2)>, \ldots , X^ <(s)>\) — решения однородной СЛАУ \(AX=0\), то любая их линейная комбинация также является решением этой системы.
Следствие. Если однородная СЛАУ имеет ненулевое решение, то она имеет бесконечно много решений.
Естественно попытаться найти такие решения \( X^<(1)>, \ldots , X^ <(s)>\) системы \(AX=0\), чтобы любое другое решение этой системы представлялось в виде их линейной комбинации и притом единственным образом. Оказывается, что это всегда возможно и приводит к следующему определению.
Определение. Любой набор из \(k=n-r\) линейно независимых столбцов, являющихся решениями однородной СЛАУ \(AX=0\), где \(n\) — количество неизвестных в системе, а \(r\) — ранг её матрицы \(A\), называют фундаментальной системой решений этой однородной СЛАУ.
При исследовании и решении однородных систем линейных алгебраических уравнений будем использовать следующую терминологию. Если в матрице \(A\) однородной СЛАУ \(AX=0\) фиксировать базисный минор, то ему соответствуют базисные столбцы и, следовательно, набор неизвестных, отвечающих этим столбцам. Указанные неизвестные называют базисными, или зависимыми, а остальные неизвестные — свободными, или независимыми.
Теорема. Пусть дана однородная СЛАУ \(AX=0\) с \(n\) неизвестными и \( \text
Если в фундаментальной системе решений все значения независимых неизвестных равны нулю, кроме одного, которое равно единице, то такую систему решений называют фундаментальной нормальной системой решений.
Следствие. С помощью нормальной фундаментальной системы решений однородной СЛАУ множество всех решений можно описать формулой :
$$ X = c_1X^ <(1)>+ \ldots + c_kX^ <(k)>$$
где постоянные \( c_i \;, \quad i=\overline <1,k>\), принимают произвольные значения.
Следствие. Для существования ненулевого решения у однородной квадратной СЛАУ необходимо и достаточно, чтобы её матрица была вырождена.
Неоднородные системы
Рассмотрим произвольную СЛАУ \(AX=B\). Заменив столбец \(B\) свободных членов нулевым, получим однородную СЛАУ \(AX=0\), соответствующую неоднородной СЛАУ \(AX=B\). Справедливо следующее утверждение о структуре произвольного решения неоднородной СЛАУ.
Теорема. Пусть столбец \(X^\circ\) — некоторое решение СЛАУ \(AX=B\). Произвольный столбец \(X\) является решением этой СЛАУ тогда и только тогда, когда он имеет представление \(X = X^\circ + Y \), где \(Y\) — решение соответствующей однородной СЛАУ \(AY=0\).
Следствие. Пусть \(X’\) и \(X»\) — решения неоднородной системы \(AX=B\). Тогда их разность \( Y = X’ — X» \) является решением соответствующей однородной системы \(AY=0\).
Эта теорема сводит проблему решения СЛАУ к случаю однородной системы: чтобы описать все решения неоднородной СЛАУ, достаточно энать одно её решение (частное решение) и все решения соответствующей однородной СЛАУ.
Чтобы решить неоднородную систему, надо, во-первых, убедиться, что она совместна (например, по теореме Кронекера-Капелли), а во-вторых, найти частное решение \(X^\circ\) этой системы, чтобы свести её к однородной системе.
Теорема о структуре общего решения СЛАУ. Пусть \(X^\circ\) — частное решение СЛАУ \(AX=B\) и известна фундаментальная система решений \( X^<(1)>, \ldots , X^ <(k)>\) соответствующей однородной системы \(AX=0\). Тогда любое решение СЛАУ \(AX=B\) можно представить в виде $$ X = X^\circ + c_1 X^ <(1)>+ c_2 X^ <(2)>+ \ldots + c_k X^ <(k)>$$
где \( c_i \in \mathbb
Эту формулу называют общим решением СЛАУ.
http://matworld.ru/linear-equations.php
http://www.math-solution.ru/math-task/slau