Примеры решения СЛАУ
Методы решения систем линейных уравнений широко используются в задачах математики, экономики, физики, химии и других науках. На практике, они позволяют не делать лишних действий, а записать систему уравнений в более компактной форме и сократить время выполнения задач. Поэтому, будущим специалистам очень важно понять основные методы решения и научиться выбирать оптимальный.
Перед изучением примеров решения задач советуем изучить теоретический материал по СЛАУ, прочитать все теоремы и методы решения. Список тем находится в правом меню.
Примеры по темам:
СЛАУ: основные понятия, виды
Задание. Проверить, является ли набор $<0,3>$ решением системы $\left\<\begin
Решение. Подставляем в каждое из уравнений системы $x=0$ и $y=3$ :
$$3 x-2 y=-6 \Rightarrow 3 \cdot 0-2 \cdot 3=-6 \Rightarrow-6=-6$$ $$5 x+y=3 \Rightarrow 5 \cdot 0+3=3 \Rightarrow 3=3$$
Так как в результате подстановки получили верные равенства, то делаем вывод, что заданный набор является решением указанной СЛАУ.
Ответ. Набор $<0,3>$ является решением системы $\left\<\begin

Задание. Систему $\left\<\begin
Решение. Заданную СЛАУ записываем в матричной форме $A \cdot X=B$ , где матрица системы:
$$A=\left(\begin
$$A=\left(\begin
вектор-столбец свободных коэффициентов:
то есть, запись СЛАУ в матричной форме:
$$\left(\begin
Задание. Записать матрицу и расширенную матрицу системы $\left\<\begin
Решение. Матрица системы $A=\left(\begin
Критерий совместности системы
Задание. При каких значениях $\lambda$ система $\left\<\begin
Решение. Ранг матрицы равен количеству ненулевых строк после приведения этой матрицы к ступенчатому виду. Поэтому записываем расширенную матрицу системы $\tilde$ (слева от вертикальной черты находится матрица системы $A$ ):
и с помощью элементарных преобразований приводим ее к ступенчатому виду. Для этого вначале от второй строки отнимаем две вторых строки, а от третьей вторую, в результате получаем:
Третью строку складываем с первой:
и меняем первую и вторую строки матрицы местами
Квадратные СЛАУ. Матричный метод решения
Теоретический материал по теме — матричный метод решения.
Задание. Найти решение СЛАУ $\left\<\begin
Решение. Выпишем матрицу системы $\left\<\begin
$$X=\left(\begin
Две матрицы одного размера равны, если равны их соответствующие элементы, то есть в итоге имеем, что $x_<1>=-11$, $x_<2>=31$
Ответ. $x_<1>=-11$, $x_<2>=31$
Задание. Решить с помощью обратной матрицы систему $\left\<\begin
Решение. Запишем данную систему в матричной форме:
где $A=\left(\begin
Найдем обратную матрицу $A^-1$ к матрице $A$ с помощью союзной матрицы:
Определитель матрицы $A$
$$\Delta=\left|\begin
Отсюда искомая матрица
Метод / Теорема Крамера
Теоретический материал по теме — метод Крамера.
Задание. Найти решение СЛАУ $\left\<\begin
Решение. Вычисляем определитель матрицы системы:
$$\Delta=\left|\begin
Так как $\Delta \neq 0$ , то по теореме Крамера система совместна и имеет единственное решение. вычислим вспомогательные определители. Определитель $\Delta_<1>$ получим из определителя $\Delta$ заменой его первого столбца столбцом свободных коэффициентов. Будем иметь:
$$\Delta_<1>=\left|\begin
Аналогично, определитель $\Delta_<2>$ получается из определителя матрицы системы $\Delta$ заменой второго столбца столбцом свободных коэффициентов:
$$\Delta_<2>=\left|\begin
Тогда получаем, что
Ответ. $x_<-1>=-11$, $x_ <2>= 31$
Задание. При помощи формул Крамера найти решение системы $\left\<\begin
Решение. Вычисляем определитель матрицы системы:
$$\Delta=\left|\begin
Так как определитель матрицы системы неравен нулю, то по теореме Крамера система совместна и имеет единственное решение. Для его нахождения вычислим следующие определители:
$$\Delta_<1>=\left|\begin
Метод Гаусса. Метод последовательного исключения неизвестных
Теоретический материал по теме — метод Гаусса.
Задание. Решить СЛАУ $\left\<\begin
Решение. Выпишем расширенную матрицу системы и при помощи элементарных преобразований над ее строками приведем эту матрицу к ступенчатому виду (прямой ход) и далее выполним обратный ход метода Гаусса (сделаем нули выше главной диагонали). Вначале поменяем первую и вторую строку, чтобы элемент $a_<1>$ равнялся 1 (это мы делаем для упрощения вычислений):
Далее делаем нули под главной диагональю в первом столбце. Для этого от второй строки отнимаем две первых, от третьей — три первых:
Все элементы третьей строки делим на два (или, что тоже самое, умножаем на $\frac<1><2>$:
Далее делаем нули во втором столбце под главной диагональю, для удобства вычислений поменяем местами вторую и третью строки, чтобы диагональный элемент равнялся 1:
От третьей строки отнимаем вторую, умноженную на 3:
Умножив третью строку на $\left(-\frac<1><2>\right)$ , получаем:
Проведем теперь обратный ход метода Гаусса (метод Гассу-Жордана), то есть сделаем нули над главной диагональю. Начнем с элементов третьего столбца. Надо обнулить элемент $$\tilde \sim\left(\begin
Далее обнуляем недиагональные элементы второго столбца, к первой строке прибавляем вторую:
Полученной матрице соответствует система
$\left\<\begin
Однородные СЛАУ. Фундаментальная система решений
Теоретический материал по теме — однородные СЛАУ.
Задание. Выяснить, имеет ли однородная СЛАУ $\left\<\begin
Решение. Вычислим определитель матрицы системы:
$$\Delta=\left|\begin
Так как определитель не равен нулю, то система имеет только нулевое решение $x=y=0$
Ответ. Система имеет только нулевое решение.
Задание. Найти общее решение и ФСР однородной системы $\Delta=\left|\begin
Решение. Приведем систему к ступенчатому виду с помощью метода Гаусса. Для этого записываем матрицу системы (в данном случае, так как система однородная, то ее правые части равны нулю, в этом случае столбец свободных коэффициентов можно не выписывать, так как при любых элементарных преобразованиях в правых частях будут получаться нули):
$$A=\left(\begin
с помощью элементарных преобразований приводим данную матрицу к ступенчатому виду. От второй строки отнимаем первую, от третьей — четыре первых, от четвертой — две первых:
$$A \sim\left(\begin
Обнуляем элементы второго столбца, стоящие под главной диагональю, для этого от третьей строки отнимаем три вторых, к четвертой прибавляем вторую:
$$A \sim\left(\begin
От четвертой строки отнимем $$\frac<4><3>$$ третьей и третью строку умножим на $$\frac<1><3>$$ :
$$A \sim\left(\begin
Нулевые строки можно далее не рассматривать, тогда получаем, что
$$A \sim\left(\begin
Далее делаем нули над главной диагональю, для этого от первой строки отнимаем третью, а ко второй строке прибавляем третью:
$$A \sim\left(\begin
то есть получаем систему, соответствующую данной матрице:
Или, выразив одни переменные через другие, будем иметь:
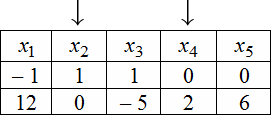
Здесь $x_<2>, x_<4>$ — независимые (или свободные) переменные (это те переменные, через которые мы выражаем остальные переменные), $x_<1>,x_<3>,x_<5>$ — зависимые (связанные) переменные (то есть те, которые выражаются через свободные). Количество свободных переменных равно разности общего количества переменных $n$ (в рассматриваемом примере $n=5$ , так как система зависит от пяти переменных) и ранга матрицы $r$ (в этом случае получили, что $r=3$ — количество ненулевых строк после приведения матрицы к ступенчатому виду): $n-r=5-3=2$
Так как ранг матрицы $r=3$ , а количество неизвестных системы $n=5$ , то тогда количество решений в ФСР $n-r=5-3-2$ (для проверки, это число должно равняться количеству свободных переменных).
Для нахождения ФСР составляем таблицу, количество столбцов которой соответствует количеству неизвестных (то есть для рассматриваемого примера равно 5), а количество строк равно количеству решений ФСР (то есть имеем две строки). В заголовке таблицы выписываются переменные, свободные переменные отмечаются стрелкой. Далее свободным переменным придаются любые, одновременно не равные нулю значений и из зависимости между свободными и связанными переменными находятся значения остальных переменных. Для рассматриваемой задачи эта зависимость имеет вид:
Тогда придавая в первом случае, например, независимым переменным значения $x_<2>=1$ , $x_<4>=0$ получаем, что $\left\<\begin
Эти две строчки и есть фундаментальным решением заданной однородной СЛАУ. Частное решение системы:
Общее решение является линейной комбинацией частных решений:
$$X=C_ <1>X_<1>+C_ <2>X_<2>=C_<1>\left(\begin
где коэффициенты $C_<1>, C_<2>$ не равны нулю одновременно. Или запишем общее решение в таком виде:
Придавая константам $C_<1>, C_<2>$ определенные значения и подставляя их в общее решение, можно будет находить частные решения однородной СЛАУ.
Конспекты «Системы линейных уравнений»
Системы линейных уравнений
Содержание
Введение
СЛУ можно использовать в экономике для решения экономических задач
1 Метод нахождения неотрицательного решения СЛУ
Что такое СЛУ
Система линейных алгебраических уравнений ( линейная система , также употребляются аббревиатуры СЛАУ , СЛУ ) — система уравнений , каждое уравнение в которой является линейным — алгебраическим уравнением первой степени. То есть система m линейных уравнений с n неизвестными ( или , линейная система ) в линейной алгебре — это система уравнений вида 
Здесь <\displaystyle m>m — количество уравнений, а <\displaystyle n>n — количество переменных, <\displaystyle x_<1>,x_<2>,\dots ,x_
Система называется , если все её свободные члены равны нулю ( <\displaystyle b_<1>=b_<2>=\dots b_
Квадратная система линейных уравнений — система, у которой количество уравнений совпадает с числом неизвестных ( <\displaystyle m=n>m = n ). Система, у которой число неизвестных больше числа уравнений является недоопределённой , такие системы линейных алгебраических уравнений также называются прямоугольными . Если уравнений больше, чем неизвестных, то система является переопределённой .
Система называется совместной , если она имеет хотя бы одно решение, и несовместной , если у неё нет ни одного решения. Решения считаются различными, если хотя бы одно из значений переменных не совпадает.
Система  является совместной, так как она имеет, по крайней мере, одно решение
является совместной, так как она имеет, по крайней мере, одно решение  ,
, 
Совместная система с единственным решением называется определённой , при наличии более одного решения — неопределённой .
Система называется квадратной , если количество уравнений равно количеству неизвестных.
Равносильными называются две системы уравнений, если они имеют одно и тоже множество решений.
СЛУ в алгебре и геометрии
Лине́йная а́лгебра — раздел алгебры , изучающий объекты линейной природы : векторные (или линейные) пространства, линейные отображения , системы линейных уравнений , среди основных инструментов, используемых в линейной алгебре — определители , матрицы , сопряжение . Теория инвариантов и тензорное исчисление обычно (в целом или частично) также считаются составными частями линейной алгебры. Такие объекты как квадратичные и билинейные формы, тензоры и операции как тензорное произведение непосредственно вытекают из изучения линейных пространств, но как таковые относятся к полилинейной алгебре .
Линейная алгебра обобщена средствами общей алгебры , в частности, современное определение линейного (векторного) пространства опирается исключительно на абстрактные структуры, а многие результаты линейной алгебры обобщены на произвольные модули над кольцом . Более того, методы линейной алгебры широко используются и в других разделах общей алгебры, в частности, нередко применяется такой приём, как сведение абстрактных структур к линейным и изучение их относительно простыми и хорошо проработанными средствами линейной алгебры, так, например, реализуется в теории представлений групп . Функциональный анализ возник как применение методов математического анализа и линейной алгебры к бесконечномерным линейным пространствам, и во многом базируется на методах линейной алгебры и в дальнейших своих обобщениях. Также линейная алгебра нашла широкое применение в многочисленных приложениях (в том числе, в линейном программировании , в эконометрике ) и естественных науках (например, в квантовой механике ).
Слу в геометрии
 (3.4)
(3.4)
Каждое уравнение описывает прямую на плоскости; координаты точки пересечения указанных прямых являются решением системы (3.4).
Возможны три случая взаимного расположения двух прямых на плоскости:
1) прямые пересекаются, т.е. коэффициенты системы (3.4) не пропорциональны:
 ; (3.5)
; (3.5)
2) прямые параллельны, т.е. коэффициенты системы (3.4) подчиняются условиям
 ; (3.6)
; (3.6)
3) прямые совпадают, т.е. все коэффициенты пропорциональны
 . (3.7)
. (3.7)
Запишем определитель системы (3.4)
 .
.
Лишь при выполнении условия (3.5) определитель  не равен нулю и система имеет единственное решение (прямые пересекаются в одной точке). В случаях отсутствия решений (прямые параллельны) или при бесконечном множестве решений (прямые совпадают) выполняются соответственно соотношения (3.6) и (3.7), из которых получаем
не равен нулю и система имеет единственное решение (прямые пересекаются в одной точке). В случаях отсутствия решений (прямые параллельны) или при бесконечном множестве решений (прямые совпадают) выполняются соответственно соотношения (3.6) и (3.7), из которых получаем  .
.
Методы нахождения неотрицательных (опорных) решений СЛУ
Совокупность чисел альфа, взятых в определенном порядке, называют решением слау, если они будучи подставлены в уравнения системы на место соответствующих неизвестных, обращают все уравнения в тождества. Решение называется неотрицательным, если все его компоненты альфа неотрицательны.
Можно считать, что правые части всех уравнений неотрицательны. Последовательно исключая неизвестные, можно привести систему к предпочитаемому виду. Если после этого правые части всех уравнений полученных систем окажутся неотрицательными, то соответствующие базисные решения тоже будут неотрицательными. Следовательно, чтобы получить неотрицательные базисные решения слау, надо сделать так, чтобы свободные члены всех уравнений на всех этапах процесса исключения оставались неотрицательными. Для этого достаточно выбирать разрешающий элемент по определенным правилам. При переходе системы в другую систему используем формулы исключения:  ,где r – номер разрешающего уравнения, s – номер разрешающей неизвестной, i не =r.
,где r – номер разрешающего уравнения, s – номер разрешающей неизвестной, i не =r.  ,i=r.
,i=r.  .
.  . А – матрица коэффициентов, В – матрица свободных членов. Так как правые части уравнений должны быть неотрицательны и отбросив случай, когда правые части не изменяются, замечаем, что разрешающий элемент должен быть положительным: ars>0, т.е. в качестве разрешающей можно взять только такую неизвестную, при которой хотя бы в одном уравнении имеется положительный коэффициент. После должно быть выбрано разрешающее уравнение, исходя из условия: >0, откуда следует:
. А – матрица коэффициентов, В – матрица свободных членов. Так как правые части уравнений должны быть неотрицательны и отбросив случай, когда правые части не изменяются, замечаем, что разрешающий элемент должен быть положительным: ars>0, т.е. в качестве разрешающей можно взять только такую неизвестную, при которой хотя бы в одном уравнении имеется положительный коэффициент. После должно быть выбрано разрешающее уравнение, исходя из условия: >0, откуда следует:  . Правила выбора разрешающего элемента. В качестве разрешающей неизвестной можно принять любую неизвестную при которой есть хотя бы один положительный коэффициент, а затем в качестве разрешающего уравнения следует взять то уравнение, которое соответствует наименьшему отношению свободных членов к соответствующим положительным коэффициентам при выбранной неизвестой в этих уравнениях. Если преобразования слау осуществляются методом Жордана-Гаусса с учетом правила выбора разрешающего элемента, то они называются симплексными, т.е. приводящими гарантированно к неотрицательному решению.
. Правила выбора разрешающего элемента. В качестве разрешающей неизвестной можно принять любую неизвестную при которой есть хотя бы один положительный коэффициент, а затем в качестве разрешающего уравнения следует взять то уравнение, которое соответствует наименьшему отношению свободных членов к соответствующим положительным коэффициентам при выбранной неизвестой в этих уравнениях. Если преобразования слау осуществляются методом Жордана-Гаусса с учетом правила выбора разрешающего элемента, то они называются симплексными, т.е. приводящими гарантированно к неотрицательному решению.
Вырожденная слау – система, у которой в каком-либо предпочитаемом виде хотя бы один свободный член = 0, у нее отношение b\а может быть одинаково в нескольких уравнениях.
Система не будет иметь ни одного неотрицательного решения, если в процессе симплексных преобразований в ней появится уравнение, в котором свободный член строго положителен, а среди коэффициентов при неизвестных нет ни одного положительного.
Если правые части всех уравнений полученных систем окажутся неотрицательными ,то соответственно базисные решения также будут неотрицательными. =>чтобы получить неотрицательные базисные решения СЛУ ,надо научиться вести процесс исключения неизвестных так, чтобы свободные члены всех уравнений на всех этапах этого процесса оставались неотрицательными. Для этого следует руководствоваться след правилам: 1)если в СЛАУ им отрицательные свободные члены, то все такие уравнения необходимы *(-1); 2)в качестве разрешающей принимать ту переменную, коэффициента при кот хотя бы в одном уравнении системы положителен; 3)для нахождения разрешающего уравнения находят тип отношений столбца свободных членов к положительным элементам разрешающего столбца, в этом сл k-ое уравнение будет разрешающим
Если хотя бы в одном из уравнений системы свободный член положителен, а все коэффициенты при неизвестных
Опорные решения системы линейных уравнений
Применение математических методов в экономике приводит к необходимости отыскания неотрицательных решений системы линейных уравнений, т.е. таких, в которых  .
.
При этом особое значение имеют неотрицательные базисные решения, которые принято называть опорными решениями .
Таким образом, у опорных решений все базисные неизвестные должны иметь только неотрицательные значения.
Отсюда естественным образом получается один из способов отыскания опорных решений системы: из всех базисных решений выбрать одно, несколько или все (сколько требуется по условию задачи) неотрицательные решения (конечно, если они существуют в нужном количестве или вообще существуют).
Отсюда же видно, что число опорных решений системы может быть значительно меньше числа базисных решений, т.е. пытаться предварительно отыскать все базисные решения – не слишком благодарная работа. Еще раз отметим, что в базисном решении системы значения базисных неизвестных равны свободным членам системы, приведенной к единичному базису, и для того, чтобы базисное решение оказалось опорным, необходимо и достаточно, чтобы эти свободные члены были неотрицательными.
Поэтому задачу отыскания опорных решений системы естественно начать с того, чтобы сделать все ее свободные члены неотрицательными (для этого каждое уравнение с отрицательным свободным членом достаточно умножить на (-1)).
Далее можно воспользоваться тем же алгоритмом приведения системы к единичному базису, что и при получении базисных решений, только его следует дополнить специальным правилом выбора ключевого элемента : ключевой столбец (допустим р -й) выбирается так, чтобы он имел хотя бы один положительный элемент  , и составляются отношения
, и составляются отношения  свободных членов
свободных членов  к соответствующим положительным элементам ключевого столбца; то уравнение (пусть q -е), для которого указанное отношение оказывается наименьшим, выбирается в качестве ключевого (ключевой строки).
к соответствующим положительным элементам ключевого столбца; то уравнение (пусть q -е), для которого указанное отношение оказывается наименьшим, выбирается в качестве ключевого (ключевой строки).
Таким образом  (1)
(1)
После получения исходного (первого) опорного решения системы возникает вторая задача, как последовательно перейти от него к следующему, тоже опорному решению. Оказывается, для этого можно использовать алгоритм преобразования однократного замещения, дополненный этим же правилом (1) выбора ключевого элемента.
Преобразования системы с неотрицательными свободными членами к единичному базису, а также преобразования однократного замещения (и те, и другие), при которых выбор ключевого элемента производится по указанному правилу (1), принято называть симплексными преобразованиями .
Для симплексных преобразований справедлива следующая теорема:
Если все свободные члены уравнений системы неотрицательны, то после симплексных преобразований системы они останутся неотрицательными
Сформулированная теорема подтверждает правило отыскания опорного решения методом Жордана-Гаусса, состоящее в соблюдении следующих условий:
1) все свободные члены уравнений системы должны быть неотрицательными; если есть хотя бы один отрицательный свободный член, то соответствующее ему уравнение нужно умножить на (-1);
2) в базис можно ввести только то неизвестное, у которого есть хотя бы один положительный коэффициент;
3) если при неизвестной, вводимой в базис, имеются положительные коэффициенты в нескольких уравнениях, то неизвестная вводится в базис в том уравнении, которому соответствует наименьшее отношение свободных членов к этим положительным коэффициентам.
Примеры задач на нахождение неотрицательных (опорных) решений СЛУ
Пример 1. Найдите опорное решение системы уравнений

Так как во втором уравнении свободный член  , умножим это уравнение на (-1). Заполним исходную таблицу Гаусса.
, умножим это уравнение на (-1). Заполним исходную таблицу Гаусса.
Все свободные члены положительные. При неизвестной  есть положительные коэффициенты, значит, можно ее ввести в базис. Поскольку положительные коэффициенты при присутствуют во всех трех уравнениях, следует найти (согласно формуле (1)) минимальное отношение свободных членов к этим положительным коэффициентам, т.е.
есть положительные коэффициенты, значит, можно ее ввести в базис. Поскольку положительные коэффициенты при присутствуют во всех трех уравнениях, следует найти (согласно формуле (1)) минимальное отношение свободных членов к этим положительным коэффициентам, т.е.  .
.
Это минимальное отношение соответствует как первой, так и третьей строке, следовательно, можно вводить в базис как в первом уравнении, так и в третьем. Введем в базис в первом уравнении: ключевой элемент  , ключевая строка первая, ключевой столбец первый.
, ключевая строка первая, ключевой столбец первый.
Составляем таблицу Гаусса I итерации.
При неизвестной  есть положительные коэффициенты в первом и во втором уравнениях, причем во втором уравнении нет базисной переменной. Но можно ввести в базис только в том случае, если минимальное отношение свободных членов к положительным коэффициентам соответствует второму уравнению.
есть положительные коэффициенты в первом и во втором уравнениях, причем во втором уравнении нет базисной переменной. Но можно ввести в базис только в том случае, если минимальное отношение свободных членов к положительным коэффициентам соответствует второму уравнению.
Находим  .
.
Отсюда следует, что  можно ввести в базис во втором уравнении.
можно ввести в базис во втором уравнении.
Составляем таблицу Гаусса II итерации.
Итак, система приведена к единичному базису. Выпишем общее решение системы

и опорное решение  .
.
Ответ : .
Пример 2. Найдите опорное решение системы уравнений
 .
.
Так как  , то в таблицу исходной системы запишем результат умножения первого уравнения на (1).
, то в таблицу исходной системы запишем результат умножения первого уравнения на (1).
неизвестную нельзя ввести в базис, не выводя из него , т.к.  , что соответствует второму уравнению.
, что соответствует второму уравнению.
Точно так же нельзя ввести в базис неизвестную  , не выводя из него , т.к. приходится на второе уравнение. У неизвестной
, не выводя из него , т.к. приходится на второе уравнение. У неизвестной  единственный положительный коэффициент также приходится на второе уравнение. У неизвестной все коэффициенты отрицательные.
единственный положительный коэффициент также приходится на второе уравнение. У неизвестной все коэффициенты отрицательные.
Поэтому мы не можем получить опорное решение системы, вводя в базис первой неизвестную . Этот вывод можно было бы сделать быстрее, заметив, что в третьей строке при положительном свободном члене  нет ни одного положительного коэффициента при неизвестных.
нет ни одного положительного коэффициента при неизвестных.
Попытаемся начать приведение системы к единичному базису с других неизвестных.
Для неизвестной :  , поэтому вводим в базис во втором уравнении.
, поэтому вводим в базис во втором уравнении.
При этом исходная таблица имеет вид:
В третьей строке таблицы I итерации опять нет ни одного положительного коэффициента при неизвестных (при положительном свободном члене). Поэтому мы не можем получить опорные решения, вводя в базис первой неизвестную .
Для неизвестной :  , поэтому вводим в базис во втором уравнении. При этом исходная таблица имеет вид:
, поэтому вводим в базис во втором уравнении. При этом исходная таблица имеет вид:
Таблица I итерации выглядит так:
Теперь ни , ни , ни нельзя ввести в базис, не выводя из него . Остается единственная возможность: ввести в базис в первом уравнении. Получим таблицу II итерации:
Теперь в базис можно ввести лишь неизвестную , но только убрав из него (так как  приходится на второе уравнение).
приходится на второе уравнение).
Мы исчерпали все допустимые возможности выбора первой базисной неизвестной (и других) и не смогли получить опорного решения. Следовательно, мы доказали, что данная система опорных решений не имеет.
Ответ : система не имеет опорных решений.
Пример 3 . Найдите опорное решение системы
 .
.
Заполним исходную таблицу Гаусса.
При неизвестной есть два положительных коэффициента и так как  , то ввести в базис можно как в первом, так и в третьем уравнении. Введем в базис в первом уравнении.
, то ввести в базис можно как в первом, так и в третьем уравнении. Введем в базис в первом уравнении.
Получим таблицу I итерации:
Теперь в базис можно вводить неизвестные , , , и только в третьем уравнении (  ). Введем в базис и заполним таблицу II итерации:
). Введем в базис и заполним таблицу II итерации:
Здесь во втором (единственном неиспользованном уравнении) положительный коэффициент только при , но  приходится на уже использованное третье уравнение. Поэтому будем пробовать вводить в базис второй неизвестной одну из неизвестных , и (по очереди) и заполнять новые таблицы I и II итерации.Начнем с неизвестной :
приходится на уже использованное третье уравнение. Поэтому будем пробовать вводить в базис второй неизвестной одну из неизвестных , и (по очереди) и заполнять новые таблицы I и II итерации.Начнем с неизвестной :
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Системы линейных уравнений
Обозначим через $ \mathbb A_<> $ любое из множеств $ \mathbb Q_<>, \mathbb R_<> $ или $ \mathbb C_<> $.
Примеры систем уравнений над $ \mathbb R $.
Относительно числа $ m_<> $ уравнений не делается ни какого предположения: оно может быть меньше, больше или равно числу переменных $ n_<> $. Если $ m_<>>n $ то система называется переопределенной. Решением системы уравнений называется любой набор значений переменных $ x_1=\alpha_<1>,\dots, x_n = \alpha_n $, обращающий каждое из уравнений в истинное равенство. Система называется совместной если она имеет хотя бы одно решение и несовместной в противном случае.
Можно доказать (см. результаты ☟ НИЖЕ ), что все возможности для произвольной системы ограничиваются следующими вариантами:
1. система совместна и имеет единственное решение;
2. cистема совместна и имеет бесконечное множество решений;
3. cистема несовместна.
При этом все решения будут находиться в том же множестве $ \mathbb A_<> $, что и коэффициенты системы.
Матричная форма записи
Для системы линейных уравнений относительно переменных $ x_1,x_2,\dots,x_n $ $$ \left\< \begin
Исключение переменных (метод Гаусса)
метода достаточно проста.
Пример. Решить систему уравнений $$ \left\< \begin
Решение. Выразим из первого уравнения $ x_ <1>$ $$ x_1=\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3> <2>$$ и подставим в оставшиеся уравнения $$ 4 \left(\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3><2>\right) -3\,x_2-5\,x_3=6 \ <\color
Ответ. $ x_<1>=1/4, x_2=-5/8, x_3=-5/8 $.
Теперь осталось формализовать изложенную идею метода (сформулировав допустимые правила действия над уравнениями — те, что в принципе, очевидны из здравого смысла ), а также исследовать возможные последствия его применения к системам общего вида.
Исключение переменных
Элементарными преобразованиями системы л.у. называются преобразования следующих трех типов:
1. перестановка двух уравнений;
2. умножение обеих частей уравнения на любое отличное от нуля число;
3. прибавление к одному уравнению любого другого, умноженного на произвольное число: пара уравнений $$ \begin
Теорема. Любое элементарное преобразование системы л.у. переводит эту систему в ей эквивалентную, т.е. имеющую то же множество решений, что и исходная.
Задача. С помощью элементарных преобразований привести систему л.у. к наиболее простому виду: такому, из которого легко было бы установить множество решений.
Предположим, что первое уравнение системы содержит явно неизвестную $ x_ <1>$, т.е. $ a_<11>^<> \ne 0 $. Исключим эту неизвестную из всех оставшихся уравнений. С этой целью вычтем из второго уравнения первое, домноженное на $ a_<21>/a_<11>^<> $. Получим $$\left(a_<22>— \frac
Понятно, что процесс исключения может быть продолжен и далее. Теперь посмотрим, где он может прерваться. Может так случиться, что очередная, $ \ell_<> $-я подсистема имеет коэффициент $ a_<\ell \ell>^ <[\ell-1]>$ равным нулю, что не позволит алгоритму идти дальше — т.е. исключить переменную $ x_<\ell>^<> $ из оставшихся уравнений (в принципе, такое могло случиться уже на первом шаге, если бы коэффициент $ a_<11>^<> $ был бы равен нулю). Возможные варианты дальнейших действий:
1. если хотя бы один коэффициент при $ x_<\ell>^<> $ в одном из оставшихся уравнений отличен от нуля: $ a_
2. если при всех $ j\ge \ell^<> $ коэффициенты $ a_
Поскольку число переменных конечно, то алгоритм исключения должен завершиться за конечное число шагов. Чем он может завершиться? Окончательная система должна иметь вид: $$ \left\< \begin
Предположение . Мы будем считать, что каждое из первых $ <\mathfrak r>_<> $ уравнений системы содержит в своей левой части хотя бы одну переменную с ненулевым коэффициентом.
Процесс получения системы такого вида из исходной системы уравнений называется прямым ходом метода Гаусса.
Исторический комментарий о Гауссе ☞ ЗДЕСЬ.
Установление множества решений
Теорема. Если хотя бы одно из чисел $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>,\dots , b_
Для простоты мы будем иллюстрировать наши рассуждения на системах л.у. над $ \mathbb R_<> $, в этом же множестве искать решения. Каждое из преобразований метода Гаусса будем обозначать $ \to_<> $.
Пример. Решить систему л.у.
$$ \left\< \begin
Решение. $$ \ \to \ \left\< \begin
Ответ. Система несовместна.
Пусть теперь $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_ Из последнего уравнения системы можно однозначно установить значение $ x_
Из последнего уравнения системы можно однозначно установить значение $ x_
Теорема. Если прямой ход метода Гаусса заканчивается треугольной системой, т.е. $ \mathfrak r = n_<> $ и $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_
Пример. Решить систему л.у.
$$ \left\< \begin
Ответ. $ x_1=1,\, x_<2>=2,\, x_3=-2 $ .
Исследуем теперь случай $ <\mathfrak r>1) :  На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
Теорема. Если прямой ход метода Гаусса заканчивается трапециевидной системой, т.е. $ \mathfrak r 2) матрицы $ A_<> $ (третьего порядка). Понятие определителя распространяется и на квадратные матрицы бóльших порядков; образно говоря, определитель — это функция элементов матрицы, отвечающая за единственность решения системы уравнений.
Дальнейший матричный анализ метода Гаусса ☞ ЗДЕСЬ.
Формулы Крамера
Рассмотрим систему линейных уравнений с квадратной матрицей $ A_<> $, т.е. такую, у которой число уравнений совпадает с числом неизвестных.
Теорема. Cистема
$$ \left\<\begin
Доказательство ☞ ЗДЕСЬ
Пример. Решить систему уравнений
$$ \left\<\begin
Решение. $$ x_1=\frac<\left|\begin
Решение системы линейных уравнений с квадратной матрицей $ A_<> $ является непрерывной функцией коэффициентов этой системы при условии, что $ \det A_<> \ne 0 $.
Кроме того, формулы Крамера начинают конкурировать по вычислительной эффективности с методом Гаусса в случае систем, зависящих от параметра. Подробнее ☞ ЗДЕСЬ.
Еще один способ решения системы основан на построении обратной матрицы: $$ AX= <\mathcal B>\quad \Rightarrow \quad X=A^<-1> <\mathcal B>\ . $$ Этот способ малоэффективен при фиксированных числовых $ A_<> $ и $ <\mathcal B>_<> $.
Найти достаточное условие существования общего решения систем уравнений:
$$ A_1 X = <\mathcal B>_1 \quad u \quad A_2 Y = <\mathcal B>_2 \ , $$ при квадратных матрицах $ A_1 $ и $ A_2 $ одинакового порядка.
Теорема Кронекера-Капелли
Матрица, получающаяся конкатенацией матрицы $ A_<> $ и столбца правых частей $ <\mathcal B>_<> $ $$ [ A| <\mathcal B>] = \left( \begin
Теорема [Кронекер, Капелли]. Система $ AX= <\mathcal B>$ совместна тогда и только тогда, когда ранг матрицы этой системы совпадает с рангом ее расширенной матрицы:
$$ \operatorname
Доказательство необходимости. Пусть существует решение $ x_1=\alpha_1,\dots,x_n=\alpha_n $ системы, тогда $$\alpha_1 A_<[1]>+\dots+\alpha_n A_<[n]>= <\mathcal B>\ ,$$ т.е. столбец $ <\mathcal B>$ линейно выражается через столбцы $ A_<[1]>,\dots,A_ <[n]>$. Но тогда $$ \operatorname
Доказательство достаточности проводится в следующем пункте. ♦
Пример. Исследовать совместность системы уравнений
Решение. В этом примере число уравнений совпадает с числом неизвестных. Это обстоятельство несколько облегчает рассуждения. Обратимся к замечанию из предыдущего пункта: система л.у. с числом уравнений, совпадающем с числом неизвестных, как правило, совместна. Тогда попробуем установить условия, обеспечивающие противоположное свойство — несовместность. Оно, фактически, единственно: за все отвечает определитель системы $ \det A_<> $. Если он отличен от нуля — система совместна. $$\det A = \left| \begin
Осталось исследовать критические случаи: $ <\color
При $ <\color
Ответ. Система несовместна при $ <\color
Система однородных уравнений
$$ \left\< \begin
Пример. Найти условие, при котором три точки плоскости с координатами $ (x_1,y_1), (x_2,y_2) $ и $ (x_3,y_<3>) $ лежат на одной прямой.
Решение. Будем искать уравнение прямой в виде $ ax+by+c=0 $ при неопределенных коэффициентах $ a,b,c_<> $. Если точки лежат на прямой, то получаем для определения этих коэффициентов систему линейных уравнений: $$ \left\< \begin
Доказать, что для совместности системы
$$ \left\< \begin
An elementary treatise on determinants
в следующей формулировке.
Теорема. Для того чтобы система $ n_<> $ неоднородных уравнений была совместна, необходимо и достаточно, чтобы порядок наибольшего отличного от нуля минора был одинаков в расширенной и нерасширенной матрице системы.
Додсон — один из самых знаменитых математиков мира. Назовите его псевдоним.
Ответ ☞ ЗДЕСЬ
Общее решение
Пусть выполнено условие теоремы Кронекера-Капелли: $ \operatorname
Пусть теперь $ \mathfrak
Пример. Исследовать совместность и найти общее решение системы уравнений:
Решение проведем двумя способами, соответствующими двум способам вычисления ранга матрицы. Вычисляем сначала ранг матрицы $ A $ по методу окаймляющих миноров: $$ |2| \ne 0,\quad \left| \begin
Ненулевой минор третьего порядка (базисный минор) находится в первой, второй и четвертых строках, что означает линейную независимость соответствующих уравнений. Третье уравнение линейно зависит от остальных, и может быть отброшено. Далее, указанный базисный минор образован коэффициентами при $ x_1,x_3 $ и $ x_4 $. Следовательно оставшиеся уравнения могут быть разрешены относительно этих переменных, т.е. они — зависимые, а $ x_2 $ и $ x_5 $ — основные. Использование формулы дает общее решение $$ \begin
Ответ. Общее решение системы: $ x_1=1/2 (x_2+x_5-1),\ x_3=3-4\,x_5,\ x_4=0 $.
Проанализируем теперь полученные общие формулы для общего решения. В этих формулах $ \beta_j $ представляет решение системы, получаемое при $ x_<\mathfrak
Вывод. Формула общего решения системы $ A X=\mathcal B $: $$ x_j=\beta_j + \gamma_
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
Доказательство тривиально если система $ A X=\mathcal B $ имеет единственное решение. Если же решений бесконечно много, то выбрав какое-то одно частное $ X=X_1 $ мы получаем, что любое другое частное решение $ X=X_2 $ должно быть связано с первым соотношением $$ A(X_2-X_1)=\mathbb O , $$ т.е. разность частных решений неоднородной системы обязательно является решением однородной системы уравнений $ AX=\mathbb O $. ♦
Теперь посмотрим как можно описать общее решение однородной системы.
Система однородных уравнений
Система линейных уравнений называется однородной, если все коэффициенты правых частей равны нулю: $$ \left\< \begin
Задача ставится о поиске нетривиального решения. Оно не всегда существует. Так, к примеру, если матрица $ A_<> $ системы — квадратная и имеет ненулевой определитель, то, согласно теореме Крамера, нетривиальных решений у однородной системы нет. Теорема Кронекера-Капелли утверждает, что условие $ \det (A_<>) = 0 $ является и достаточным для существования нетривиального решения.
Теорема 1. Для того, чтобы система однородных уравнений с квадратной матрицей $ A_<> $ имела нетривиальное решение необходимо и достаточно, чтобы $ \det (A_<>) = 0 $.
Для произвольной (не обязательно квадратной) матрицы $ A_<> $ имеет место следующий общий результат.
Теорема 2. Если $ \operatorname
Теорема 3. Множество решений системы однородных уравнений образует линейное подпространство пространства $ \mathbb A^
Пусть матрица системы $ AX=\mathbb O $ квадратная и
$$ \operatorname
Теперь обсудим способы нахождения ФСР.
1. Первый из них получается из общего метода решения системы линейных уравнений, рассмотренного в предыдущем пункте. Так же, как и в том пункте, сделаем упрощающее обозначения предположение, что зависимыми переменными являются первые $ x_<1>,\dots,x_ <\mathfrak r>$, т.е. общее решение задается формулами $$ x_j=\gamma_
Оформим этот способ построения ФСР в теорему:
Теорема 4. Если система уравнений $ AX=\mathbb O $ имеет структуру матрицы $ A_<> $ вида:
$$ A = \left[ E_ <\mathfrak r>\mid P_ <\mathfrak r \times (n-\mathfrak r)>\right] \ , $$ то ее ФСР состоит из столбцов матрицы $$ \left[ \begin
Пример. Найти ФСР для системы уравнений
Решение. Приводим систему к трапециевидному виду: $$ \left\< \begin
2. Этот способ напоминает вычисление обратной матрицы методом приписывания единичной матрицы. Транспонируем матрицу $ A_<> $ системы и припишем к ней справа единичную матрицу порядка $ n_<> $: $$ \left[ A^ <\top>| E_n \right] = \left(\begin
Пример. Найти ФСР для системы уравнений
$$ \left\< \begin
$$ \left(\begin
3. Еще один способ построения ФСР основан на теореме Гамильтона-Кэли.
Теорема. Пусть матрица системы $ AX=\mathbb O $ квадратная и $ \operatorname
Пример. Найти ФСР для системы уравнений
Решение. Здесь $$ A= \left( \begin
Блок-схемы зависимости множества решений системы уравнений $ AX= \mathcal B $ от комбинации чисел $ n, \mathfrak r $ ☞ ЗДЕСЬ.
Геометрическая интерпретация
Геометрический смысл введенных определений поясним на примере $ \mathbb R^ <3>$. Уравнение $$ a_1x_1+a_2x_2+a_3x_3=b $$ — при фиксированных вещественных коэффициентах $ a_1,a_2,a_3 $ (хотя бы один из них считаем отличным от нуля) и $ b_<> $ — задает плоскость. Если, к примеру, $ a_1\ne 0 $, то из уравнения получаем выражение для $ x_ <1>$ как функции $ x_2,x_3 $: $$ x_1=\frac
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
 Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Теперь рассмотрим систему из двух уравнений: $$ \left\<\begin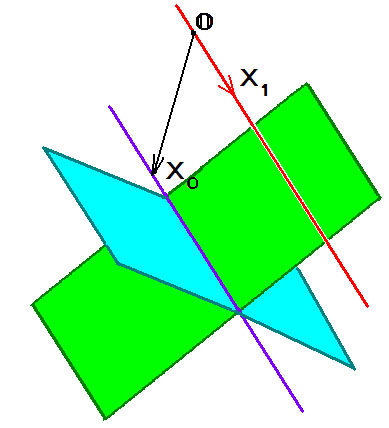 Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Мы рассмотрели пока только случай пересекающихся плоскостей в пространстве. Его можно считать общим, т.е. случаем «как правило»: две случайным образом выбранные плоскости в $ \mathbb R^ <3>$ пересекаться будут. Исследуем теперь исключительный случай — параллельности плоскостей. Исключительность этого случая может быть проверена и аналитикой. Для несовместности системы из двух уравнений необходимо, чтобы ранг ее матрицы $$ \left( \begin
Перейдем теперь к системе из трех уравнений: $$ \left\< \begin
Теорема Кронекера-Капелли в этом случае не нужна — нет, она остается справедливой! — но проверка условия на ранги матриц тривиальна: они оба равны $ 3_<> $. Если же указанный определитель обращается в нуль, то этот факт эквивалентен тому, что три строки определителя линейно зависимы. Например, возможно, что строка $ (a_<31>,a_<32>, a_<33>) $ может быть представлена в виде линейной комбинации первых двух строк. Вспомним геометрический смысл этих строк: они задают координаты векторов, перпендикулярных соответствующим плоскостям. Если система уравнений $$ \left\<\begin
Статья не закончена!
Ортогональность
Геометрические соображения из предыдущего пункта могут быть обобщены на случай когда размерности рассматриваемых пространств увеличиваются, и мы говорим о точках и векторах многомерных пространств. В последующих пунктах нам потребуются понятия линейной оболочки, линейного пространства, размерности, базиса и координат применительно к векторам-столбцам или векторам-строкам. Их можно найти ☞ ЗДЕСЬ.
Задача решения системы линейных уравнений $$ \left\< \begin
С другой стороны, к той же задаче решения системы уравнений, в предыдущем ПУНКТЕ мы подошли с другой стороны. Первое из уравнений системы $$ 3\,x_1+4\,x_2-x_3=2 $$ можно интерпретировать так: скалярное произведение векторов $ \vec<<\mathbf OA>^<[1]>> $ и $ \vec<<\mathbf OX>> $ равно фиксированному числу $ 2_<> $. Здесь вектора рассматриваются в пространстве строк $ \mathbb R_<>^ <3>$; считается, что каждый вектор имеет начало в начале координат $ \mathbf O=[0,0,0] $, а конец — в точке с координатами $ [3,4,-1] $ или, соответственно, $ [x_1,x_2,x_3] $. Если скалярное произведение векторов обозначать скобками $ \langle <> \mbox < >\rangle $, то систему уравнений можно переписать в виде $$ \langle \vec<<\mathbf OA>^<[1]>> ,\ \vec<<\mathbf OX>> \rangle=2,\ \langle \vec<<\mathbf OA>^<[2]>> ,\ \vec<<\mathbf OX>> \rangle=1 \quad npu \quad A^ <[1]>= [3,4,-1], A^<[2]>=[1,-2,3] $$ — строках матрицы $ A_<> $. И задачу решения такой системы понимать в смысле: найти координаты всех векторов-строк $ [x_1,x_2,x_3] $ которые обеспечат нам заданные значения скалярных произведений с двумя фиксированными векторами.
Геометрическая интерпретация еще более упрощается если рассмотреть случай однородной системы уравнений. Так, решить систему уравнений $$ \left\< \begin
Все эти геометрические соображения обобщаются в произвольное пространство $ \mathbb R_<>^
В терминах скалярного произведения, задачу решения системы линейных уравнений можно переформулировать как поиск строки $ X=[x_1,x_2,\dots,x_n] $, ортогональной всем строкам матрицы $ A_<> $: $$ \langle A^<[1]>,X \rangle=0, \langle A^<[2]>,X \rangle=0,\dots, \langle A^<[m]>,X \rangle=0 \ . $$ Множество таких строк образует линейное подпространство пространства $ \mathbb R_<>^
Теорема. $ \operatorname
http://infourok.ru/konspekti-sistemi-lineynih-uravneniy-1960867.html
http://vmath.ru/vf5/algebra2/linearsystems