Общее уравнение динамики. Пример решения задачи
Условие задачи
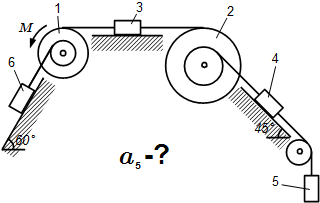
Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3-6, прикрепленных к этим нитям, и невесомого блока. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом M = 10 Н·м , приложенной к шкиву 1. Радиусы ступеней шкива 1 равны: R 1 = 0,2 м , r 1 = 0,1 м , а шкива 2 – R 2 = 0,3 м , r 2 = 0,15 м ; их радиусы инерции относительно осей вращения равны соответственно ρ 1 = 0,1 м и ρ 2 = 0,2 м .
Пренебрегая трением, определить ускорение груза 5. Веса шкивов и грузов заданы: P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н . Грузы, веса которых равны нулю, на чертеже не изображать.
Указание. При решении задачи использовать общее уравнение динамики (принцип Даламбера – Лагранжа).
Решение задачи
Дано: R 1 = 0,2 м , r 1 = 0,1 м , R 2 = 0,3 м , r 2 = 0,15 м , ρ 1 = 0,1 м , ρ 2 = 0,2 м . P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н , M = 10 Н·м .
Установление кинематических соотношений
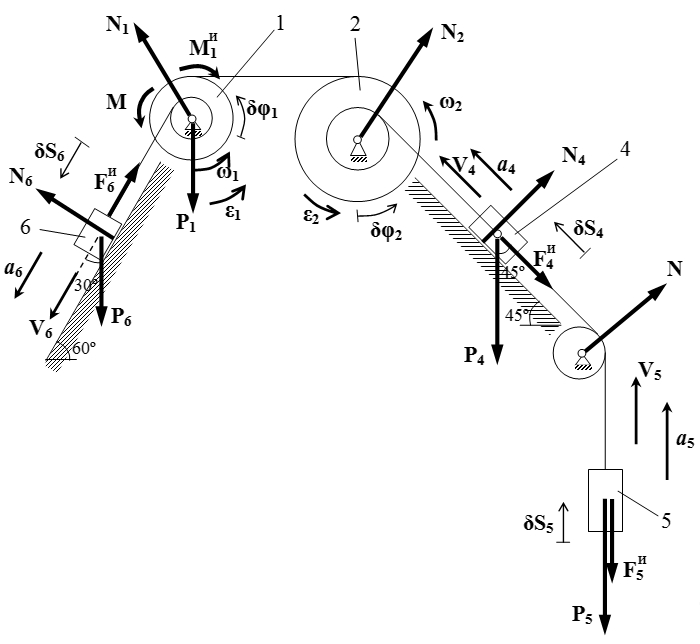
Установим кинематические соотношения. Пусть V 4 , V 5 , V 6 , a 4 , a 5 , a 6 , δS 4 , δS 5 , δS 6 – скорости, ускорения и малые перемещения грузов 4,5 и 6. Пусть ω 1 , ω 2 , ε 1 , ε 2 , δφ 1 , δφ 2 – угловые скорости, угловые ускорения и малые углы поворота шкивов 1 и 2.
Скорость движения нити между телами 2, 4 и 5:
. Отсюда .
Скорость движения нити между шкивами 1 и 2:
. Отсюда
.
Скорость движения нити между телами 1 и 6:
.
Итак, мы нашли связь между скоростями тел.
;
;
.
Поскольку ускорения – это производные скоростей по времени, ,
то дифференцируя по времени предыдущие формулы, находим связь между ускорениями:
;
;
.
Поскольку скорости – это производные от перемещений по времени, то такая же связь есть между бесконечно малыми перемещениями.
;
;
.
Активные внешние силы
Рассмотрим внешние силы, действующие на систему.
Это силы тяжести тел P 1 = 40 Н , P 4 = 20 Н , P 5 = 30 Н и P 6 = 10 Н , направленные вниз;
заданная пара сил с моментом M = 10 Н·м ;
силы давления осей N 1 , N 2 и N шкивов 1, 2 и невесомого блока;
силы реакции N 4 и N 6 , действующие на грузы со стороны поверхностей, перпендикулярные этим поверхностям.
Силы инерции
Мы будем решать эту задачу с помощью общего уравнения динамики, применяя принцип Даламбера — Лагранжа. Он заключается в том, что сначала мы вводим силы инерции. После введения сил инерции, задача динамики превращается в задачу статики. То есть нам нужно найти неизвестные силы инерции, чтобы система находилась в равновесии. Данную задачу статики мы решаем, применяя принцип Даламбера. То есть считаем, что система совершила малое перемещение. Тогда в равновесии, сумма работ всех сил, при таком перемещении, равна нулю.
Итак, на первом этапе мы вводим силы инерции. Для этого предполагаем, что система движется с некоторым, пока не определенным, ускорением. То есть шкивы 1 и 2 вращаются с угловыми ускорениями ε 1 и ε 2 , соответственно; грузы 4,5 и 6 совершают поступательное движение с ускорениями a 4 , a 5 и a 6 , соответственно. Между этими ускорениями имеются связи, которые мы нашли ранее. То есть все эти ускорения можно выразить через одно ускорение a 5 . Силы инерции определяются так, что они равны по модулю и противоположны по направлению тем силам (и моментам сил), которые, по законам динамики, создавали бы предполагаемые ускорения (при отсутствии других сил).
Определяем модули (абсолютные значения) сил и моментов инерции и выражаем их через a 5 .
Пусть – массы тел;
– момент инерции шкива 1.
Момент сил инерции, действующий на шкив 1:
.
Силы инерции, действующие на грузы 4, 5 и 6:
;
;
.
Изображаем силы инерции на чертеже учитывая, что их направления противоположны ускорениям.
Применение общего уравнения динамики
Даем системе бесконечно малое перемещение. Пусть груз 5 переместился на малое расстояние δS 5 . Тогда угол поворота δφ 1 шкива 1 и перемещения δS 4 и δS 6 грузов 4 и 6 определяются с помощью установленных ранее кинематических соотношений. Поскольку нити нерастяжимые, то они не совершают работу при таком перемещении. Это означает, что система имеет идеальные связи. Поэтому мы можем применить общее уравнение динамики:
,
согласно которому сумма работ всех активных сил и сил инерции, при таком перемещении, равна нулю.
Определение суммы работ внешних активных сил и сил инерции
Работа, которую совершает сила при перемещении точки ее приложения на малое смещение равна скалярному произведению векторов , то есть произведению модулей векторов F и ds на косинус угла между ними.
Работа, произведенная моментом сил , вычисляется аналогично:
.
Определяем работы всех активных сил и сил инерции. Поскольку центры осей шкивов 1, 2 и невесомого блока не совершают перемещений, то силы P 1 , N 1 , N 2 и N не совершают работу. Поскольку силы N 4 и N 6 перпендикулярны перемещениям грузов 4 и 6, то эти силы также не совершают работу.
Находим сумму работ остальных активных сил и сил инерции.
.
Подставляем выражения для сил инерции и применяем кинематические соотношения.
.
Сокращаем на δS 5 и преобразовываем.
.
Подставляем численные значения.
;
;
м/с 2 .
Автор: Олег Одинцов . Опубликовано: 02-08-2015
Физика дома
Умение решать задачи на законы Ньютона — является одним из показателей того, что учащийся знает и понимает физику. Тем более, что динамические задачи встречаются не только в «Механике», но и в других разделах физики (например задачи на равновесие и движение частицы в электрическом поле или движение заряженной частицы в магнитном поле).
А для того, чтобы решать задачи, всего-то надо знать алгоритм решения задач по Динамике.
И самые простые, и более сложные задачи решаются с использованием этого алгоритма, приведенного ниже.
Сам алгоритм сопровождается пояснительными рисунками (для большей наглядности).
Алгоритм решения задач по динамике.
1. Сделать рисунок, на котором изобразить тело (систему тел), о котором идет речь в задаче, и указать направление вектора скорости (если движение равномерное) или направление вектора ускорения (если движение равноускоренное или равнозамедленное) для тела (системы тел).
| Тело на горизонтали | Тело на наклонной плоскости | Cвязанные тела |
 |  |  |
2. Указать все силы, действующие на тело (систему тел).
3. Записать уравнение Ньютона (уравнение динамики) в векторной форме (векторная сумма сил, действующих на тело равна равнодействующей ma). Если речь идет о связанных телах, то уравнения Ньютона записываются для каждого тела.
4. Выбрать удобное направление координатных осей (для связанных тел направление координатных осей может отличаться).
5. Спроецировать векторное(-ые) уравнение(-я) на координатные оси.
6. Записать дополнительные кинематические уравнения, если это необходимо и формулы для определения сил.
7. Составить систему уравнений, выделить неизвестные и решить систему получившихся уравнений относительно неизвестных величин.
Большое количество задач, решенных с помощью этого алгоритма, Вы можете найти на нашем сайте.
Общее уравнение динамики – теорема Даламбера-Лагранжа — решение задач по теоретической механике
Ищите кому заказать термех — пишите мне вк

Примеры моих работ: Пример2 Пример2 Пример3
Общее уравнение динамики применяется для решения задач по термеху в случаях если необходимо определит ускорение какого либо тела, или всех тел. Иногда задачи на общее уравнение динамики просят решить используя теорему Даламбера – Лагранжа, или типа того. Это одно и тоже: общее уравнение динамики и теорема Даламбера – Лагранжа. Лично я больше предпочитаю первое название. Суть общего уравнения динамики очень проста: сумма бесконечно малых работ внешних сил и сил инерции, на бесконечно малом возможном (БМВ) перемещении системы, равна нулю.
 Вход на сайт
Вход на сайтhttp://fizika-doma.ru/eto-nado-znat/algoritm-resheniya-zadach-po-dinamike.html
http://univer2.ru/obshee_uravnenie_dinamiki.htm