Общее уравнение динамики. Пример решения задачи
Условие задачи
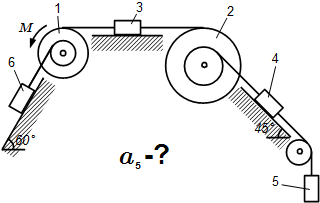
Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3-6, прикрепленных к этим нитям, и невесомого блока. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом M = 10 Н·м , приложенной к шкиву 1. Радиусы ступеней шкива 1 равны: R 1 = 0,2 м , r 1 = 0,1 м , а шкива 2 – R 2 = 0,3 м , r 2 = 0,15 м ; их радиусы инерции относительно осей вращения равны соответственно ρ 1 = 0,1 м и ρ 2 = 0,2 м .
Пренебрегая трением, определить ускорение груза 5. Веса шкивов и грузов заданы: P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н . Грузы, веса которых равны нулю, на чертеже не изображать.
Указание. При решении задачи использовать общее уравнение динамики (принцип Даламбера – Лагранжа).
Решение задачи
Дано: R 1 = 0,2 м , r 1 = 0,1 м , R 2 = 0,3 м , r 2 = 0,15 м , ρ 1 = 0,1 м , ρ 2 = 0,2 м . P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н , M = 10 Н·м .
Установление кинематических соотношений
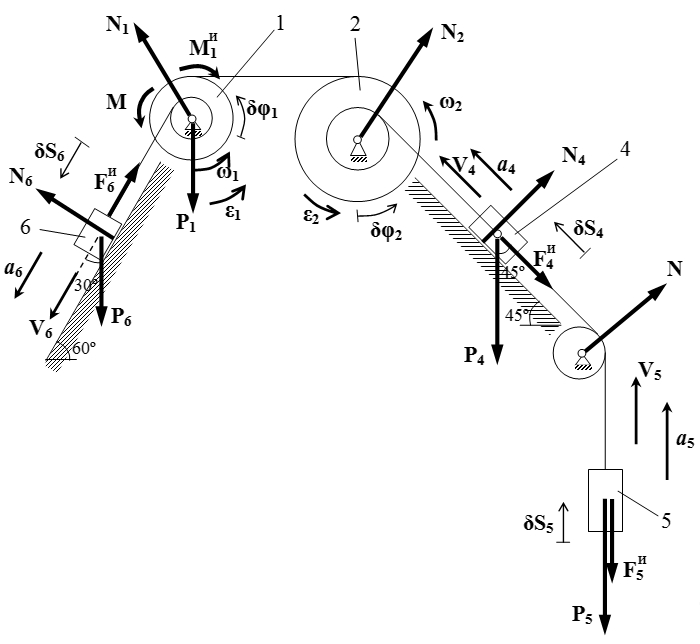
Установим кинематические соотношения. Пусть V 4 , V 5 , V 6 , a 4 , a 5 , a 6 , δS 4 , δS 5 , δS 6 – скорости, ускорения и малые перемещения грузов 4,5 и 6. Пусть ω 1 , ω 2 , ε 1 , ε 2 , δφ 1 , δφ 2 – угловые скорости, угловые ускорения и малые углы поворота шкивов 1 и 2.
Скорость движения нити между телами 2, 4 и 5:
. Отсюда .
Скорость движения нити между шкивами 1 и 2:
. Отсюда
.
Скорость движения нити между телами 1 и 6:
.
Итак, мы нашли связь между скоростями тел.
;
;
.
Поскольку ускорения – это производные скоростей по времени, ,
то дифференцируя по времени предыдущие формулы, находим связь между ускорениями:
;
;
.
Поскольку скорости – это производные от перемещений по времени, то такая же связь есть между бесконечно малыми перемещениями.
;
;
.
Активные внешние силы
Рассмотрим внешние силы, действующие на систему.
Это силы тяжести тел P 1 = 40 Н , P 4 = 20 Н , P 5 = 30 Н и P 6 = 10 Н , направленные вниз;
заданная пара сил с моментом M = 10 Н·м ;
силы давления осей N 1 , N 2 и N шкивов 1, 2 и невесомого блока;
силы реакции N 4 и N 6 , действующие на грузы со стороны поверхностей, перпендикулярные этим поверхностям.
Силы инерции
Мы будем решать эту задачу с помощью общего уравнения динамики, применяя принцип Даламбера — Лагранжа. Он заключается в том, что сначала мы вводим силы инерции. После введения сил инерции, задача динамики превращается в задачу статики. То есть нам нужно найти неизвестные силы инерции, чтобы система находилась в равновесии. Данную задачу статики мы решаем, применяя принцип Даламбера. То есть считаем, что система совершила малое перемещение. Тогда в равновесии, сумма работ всех сил, при таком перемещении, равна нулю.
Итак, на первом этапе мы вводим силы инерции. Для этого предполагаем, что система движется с некоторым, пока не определенным, ускорением. То есть шкивы 1 и 2 вращаются с угловыми ускорениями ε 1 и ε 2 , соответственно; грузы 4,5 и 6 совершают поступательное движение с ускорениями a 4 , a 5 и a 6 , соответственно. Между этими ускорениями имеются связи, которые мы нашли ранее. То есть все эти ускорения можно выразить через одно ускорение a 5 . Силы инерции определяются так, что они равны по модулю и противоположны по направлению тем силам (и моментам сил), которые, по законам динамики, создавали бы предполагаемые ускорения (при отсутствии других сил).
Определяем модули (абсолютные значения) сил и моментов инерции и выражаем их через a 5 .
Пусть – массы тел;
– момент инерции шкива 1.
Момент сил инерции, действующий на шкив 1:
.
Силы инерции, действующие на грузы 4, 5 и 6:
;
;
.
Изображаем силы инерции на чертеже учитывая, что их направления противоположны ускорениям.
Применение общего уравнения динамики
Даем системе бесконечно малое перемещение. Пусть груз 5 переместился на малое расстояние δS 5 . Тогда угол поворота δφ 1 шкива 1 и перемещения δS 4 и δS 6 грузов 4 и 6 определяются с помощью установленных ранее кинематических соотношений. Поскольку нити нерастяжимые, то они не совершают работу при таком перемещении. Это означает, что система имеет идеальные связи. Поэтому мы можем применить общее уравнение динамики:
,
согласно которому сумма работ всех активных сил и сил инерции, при таком перемещении, равна нулю.
Определение суммы работ внешних активных сил и сил инерции
Работа, которую совершает сила при перемещении точки ее приложения на малое смещение равна скалярному произведению векторов , то есть произведению модулей векторов F и ds на косинус угла между ними.
Работа, произведенная моментом сил , вычисляется аналогично:
.
Определяем работы всех активных сил и сил инерции. Поскольку центры осей шкивов 1, 2 и невесомого блока не совершают перемещений, то силы P 1 , N 1 , N 2 и N не совершают работу. Поскольку силы N 4 и N 6 перпендикулярны перемещениям грузов 4 и 6, то эти силы также не совершают работу.
Находим сумму работ остальных активных сил и сил инерции.
.
Подставляем выражения для сил инерции и применяем кинематические соотношения.
.
Сокращаем на δS 5 и преобразовываем.
.
Подставляем численные значения.
;
;
м/с 2 .
Автор: Олег Одинцов . Опубликовано: 02-08-2015
Теоретическая механика: Решебник Яблонского:
Аналитическая механика (Д14, Д15, Д16, Д17, Д18, Д19, Д20, Д21, Д22)
Бесплатный онлайн решебник Яблонского. Выберите задание и номер варианта для просмотра решения.
Задание Д.14. Применение принципа возможных перемещений к решению задач о равновесии сил, приложенных к механической системе с одной степенью свободы
Схемы механизмов, находящихся под действием взаимно уравновешивающихся сил, показаны на рис. 171–173, а необходимые данные приведены в табл. 50.
Применяя принцип возможных перемещений и пренебрегая силами сопротивления, определить величину, указанную в предпоследней графе табл. 50.
Примечание. Механизмы в вариантах 3, 6, 10, 14, 16, 18, 19, 25 и 30 расположены в вертикальной плоскости, а остальные – в горизонтальной.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание Д.15. Применение принципа возможных перемещений к определению реакций опор составной конструкции
Применяя принцип возможных перемещений, определить реакции опор составной конструкции.
Схемы конструкций показаны на рис. 176–178, а необходимые для решения данные приведены в табл. 51. На рисунках все размеры указаны в метрах.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание Д.16. Применение принципа Даламбера к определению реакций связей
Определить реакции внешних связей механической системы:
а) в произвольный момент времени – для вариантов 4, 5, 10, 12–18, 21–30 (рис. 185–187);
б) в момент времени t=t1 – для вариантов 1, 8, 9, 11, 20;
в) в тот момент времени, когда угол поворота φ=φ1, – для вариантов 2, 3, 6, 7;
г) в положении, показанном на чертеже для вариантов 15 и 19.
На схемах (рис. 185–187) плоскость xOy (xAy) горизонтальна, плоскость yOz (yAz) вертикальна. Необходимые для решения данные приведены в табл. 52, в которой ω – угловая скорость, φ0 и ω0 – значения угла поворота и угловой скорости в начальный момент времени.
Примечания: 1. Вращающиеся тела, для которых не указан радиус инерции, рассматривать как тонкие однородные стержни (варианты 1–5, 11–15, 18, 19, 23, 24, 29, 30) или сплошные однородные диски (варианты 6–9, 16, 20, 22, 28); в варианте 10 тело 2 рассматривать как материальную точку.
2. На схемах 1, 8, 9, 11, 16, 17, 20–22 указаны внешние моменты M.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание Д.17. Определение реакций опор при вращении твердого тела вокруг неподвижной оси
Однородное тело Q массой m вращается вокруг неподвижной вертикальной оси z под действием пары сил с моментом M, расположенной в горизонтальной плоскости. Определить реакции подпятника A и подшипника B в момент времени t=t1, считая, что в этот момент плоскость материальной симметрии тела совпадает с плоскостью yAz. Начальная угловая скорость ω0=0. Массой стержней, связанных с телом Q, пренебречь.
Варианты задания показаны на рис. 189–191, необходимые данные – в табл. 53.
Варианты с решением: 1 2 3 4 5 6 7 8 10 11 12 14 15 16 17 18 20 21 22 28 29 (решено 70%)
Задание Д.19. Применение общего уравнения динамики к исследованию движения механической системы с одной степенью свободы
Для заданной механической системы определить ускорения грузов и натяжения в ветвях нитей, к которым прикреплены грузы. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя.
Варианты механических систем показаны на рис. 198–200, а необходимые для решения данные приведены в табл. 55.
Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами.
Примечания: 1. Радиусы инерции даны относительно центральных осей, перпендикулярных плоскости чертежа (рис. 198–200).
2. Коэффициент трения принимать одинаковым как при скольжении тела по плоскости, так и при торможении колодкой (варианты 9–12).
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание Д.20. Применение уравнений Лагранжа II рода к определению сил и моментов, обеспечивающих программное движение манипулятора
Манипулятор (рис. 205–207), состоящий из звеньев 1, 2 и захвата D, приводится в движение приводами A и B. Захват D перемещается вдоль прямой ON. Со стороны привода A к звену 1 прикладывается либо управляющий момент MA (варианты 2, 4, 7, 8, 12, 22, 24–26, 29), либо управляющее усилие PA (варианты 1, 3, 5, 6, 9–11, 13–21, 23, 27, 28, 30). Привод B воздействует на звено 2 либо моментом MB (варианты 1–3, 5, 6, 8–11, 13–21, 23, 27), либо управляющим усилием PB (варианты 4, 7, 12, 22, 24–26, 28–30).
Перемещение звена 1 (варианты 3, 4, 7, 12, 22, 24–26, 28–30) или звена 2 (варианты 1, 2, 5, 6, 8–11, 13–21, 23, 27) манипулятора ограничено препятствиями K и L, поэтому изменение угла поворота φ=φ(t) этого звена возможно лишь в интервале [φ(0),φ(τ)], где τ – время движения звена.
Технические условия работы манипулятора требуют, чтобы указанное звено сошло со связи K при t=0 и «мягко» коснулось препятствия L при t=τ, т.е. так, чтобы были удовлетворены условия
[dφ(t)/dt]|t=0,t=τ = 0; [d 2 φ(t)/dt 2 ]|t=0,t=τ = 0.
Программные движения звена 1, удовлетворяющие требованиям «мягкого» касания, приняты в таком виде:
1) φ(t)=φ(0)+[φ(τ)-φ(0)](10-15t/τ+6t 2 /τ 2 )t 3 /τ 3 (варианты 2, 4, 6, 7, 11, 12, 16, 19, 22, 24–26, 28–30);
2) φ(t)=φ(0)+[φ(τ)-φ(0)][t/τ-(1/(2π))sin(2πt/τ)] (варианты 1, 3, 5, 8–10, 13–15, 17, 18, 20, 21, 23, 27).
Значения φ(0) и φ(τ) заданы в табл. 56, а график φ=φ(t) показан на рис. 208. Силами сопротивления движению пренебречь. Механизм расположен в горизонтальной плоскости. Движением захвата относительно звена 1 пренебречь.
В задании приняты следующие обозначения:
m1 – масса первого звена, захвата и переносимого в захвате объекта;
m2 – масса второго звена;
J1 – момент инерции звена 1, захвата и переносимого в захвате объекта относительно главной центральной оси инерции;
J2 – момент инерции звена 2.
Центр тяжести звена 1 находится в точке C (варианты 1–4, 6–8, 11–13, 16, 18–20, 22–30) или в точке A (варианты 5, 9, 10, 14, 15, 17, 21).
1. Вычислить значения управляющих сил и моментов в начале торможения звена 1. Считать, что торможение звена 1 начинается в тот момент, когда угловое ускорение звена обращается в ноль.
2. Построить графики зависимости управляющих моментов и сил от времени.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 25 26 30 (решено 87%)
Задание Д.21. Применение уравнений Лагранжа II рода к исследованию движения механической системы с двумя степенями свободы
Механическая система тел 1–6 (рис. 212–214) движется под воздействием постоянных сил P и пар сил с моментами M или только сил тяжести.
Найти уравнения движения системы в обобщенных координатах q1 и q2 при заданных начальных условиях. Необходимые данные приведены в табл. 57; там же указаны рекомендуемые обобщенные координаты (x и φ – обобщенные координаты для абсолютного движения, а ξ – для относительного движения).
При решении задачи массами нитей пренебречь. Считать, что качение колес происходит без проскальзывания. Трение качения и силы сопротивления в подшипниках не учитывать. Колеса, для которых в таблице радиусы инерции не указаны, считать сплошными однородными дисками. Водила (кривошипы) рассматривать как тонкие однородные стержни. Принять, что в вариантах 6, 9, 11, 20, 22 и 30 механизм расположен в горизонтальной плоскости.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание Д.22. Определение положений равновесия (покоя) консервативной механической системы с одной степенью свободы и исследование их устойчивости
Для консервативной механической системы с одной степенью свободы требуется:
1. Определить положения равновесия, пренебрегая массами упругих элементов.
2. Провести исследование устойчивости найденных положений равновесия.
Варианты механических систем показаны на рис. 219–221, а необходимые соотношения приведены в табл. 58.
В качестве обобщенной координаты выбрать угол φ. На рис. 219–221 показаны механические системы при некотором положительном угле φ. Во всех вариантах качение колес происходит без проскальзывания и трение в сочленениях отсутствует. При решении задачи считать все стержни и диски однородными.
iSopromat.ru

Рассмотрим общее уравнение динамики механической системы, которое также называется принципом Даламбера-Лагранжа:
Объединяя этот принцип с принципом возможных перемещений для систем с идеальными связями получаем уравнение:
которое называют общим уравнением динамики (или принципом Даламбера-Лагранжа).
При движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и сил инерции на любом возможном перемещении системы будет равна нолю.
Поскольку в уравнении присутствуют силы инерции, а следовательно и ускорения, то эти уравнения представляют собой дифференциальные уравнения движения механической системы с идеальными связями.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
http://exir.ru/termeh/yablonskij/analiticheskaya_mehanika.htm
http://isopromat.ru/teormeh/kratkaja-teoria/obschee-uravnenie-dinamiki