2. Математическое описание систем автоматического управления
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
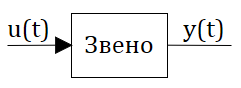
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).

где:  — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;
 — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:

где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:

где  — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):

Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть

перейдем к отклонениям от стационарного состояния:
Пусть при t>0  . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:

если  , то уравнение принимает вид:
, то уравнение принимает вид:


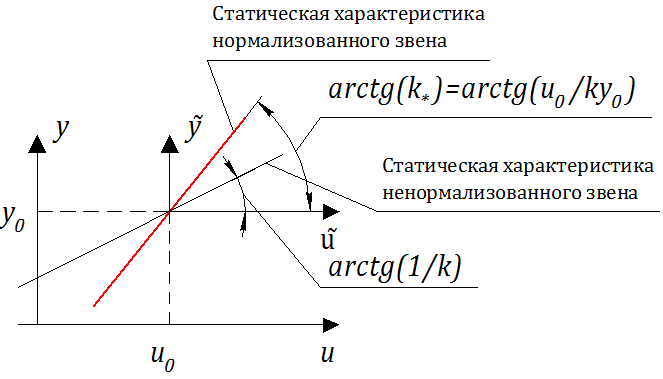
Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:

тогда, разделив на k, имеем:


Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:


Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [ ];
];
— коэффициент в правой части ( ): [
): [ ].
].
Тогда уравнение (2.1.6) можно записать в операторной форме:
 , что эквивалентно
, что эквивалентно

где:  — оператор диффренцирования;
— оператор диффренцирования;
 -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 — линейный дифференциальный оператор, вырожденный в константу, равную .
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:

Подставляя эти соотношения в уравнение (2.1.2), имеем:


Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие  , и, разделив на
, и, разделив на  , получаем:
, получаем:


где:  — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента 

Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
На рис. 2.1.4 представлены статические характеристики для механического демпфера:
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:

где  дифференциальные операторы.
дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или  , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:

Перенесем  в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%

где  -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:

Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния  .
.
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если  , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

C учетом вышеприведенного разложение принимает вид:

Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.: ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку  , получаем:
, получаем:

Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:


Коэффициенты  — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:

где  – оператор дифференцирования;
– оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора : 
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:

Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>

Если вынести в правой части (2.2.7) коэффициент  за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:


или в операторном виде:

Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.

Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:

Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:

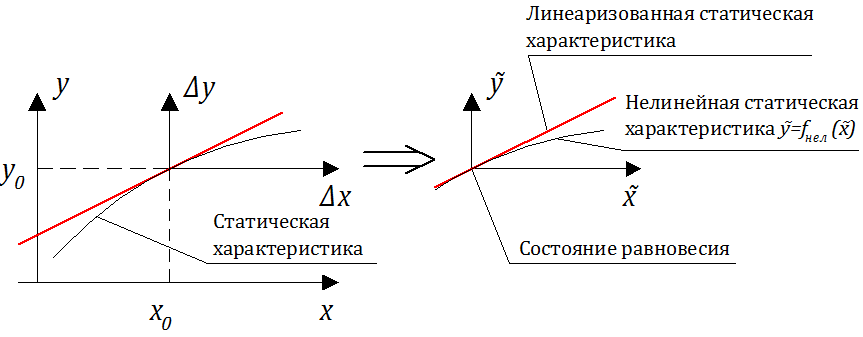
• во-вторых, слагаемое в левой части  — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:

Заметим, что:  .
.
Подставляя значения x(t) и y(t) в исходное уравнение:

Удаляем полученного уравнения уравнения стационара:  , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:

Вводим новые обозначения:

Получаем уравнения в «почти» классическом виде:

Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:


Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:

Переходя к полной символике, имеем: 

Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.

где:  — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_<част.>(t) $inline$ — частное решение. $inline$
y_<част.>(t) $inline$ — частное решение. $inline$
Будем называть решение однородного дифференциального уравнения  , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть  , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:

Напомним этапы решения:
1) Если имеется уравнение вида  , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:

2) Записываем характеристическое уравнение:

3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 
4) Тогда собственное решение записывается в виде:

если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:

Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:

5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения.  .
.
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:

7) Используя начальные условия (t = 0), находим значения постоянных интегрирования  . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
. Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если

Решение. Запишем однородное ОДУ: 
Характеристическое уравнение имеет вид:  ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:

где  — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем  как:
как:

Подставляя в исходное уравнение, имеем:

Суммируя  , имеем:
, имеем: 
Используя 1-е начальное условие (при t = 0), получаем:  , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
Решая систему уравнений относительно  и
и  , имеем:
, имеем: 
Тогда окончательно:

Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:

Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).
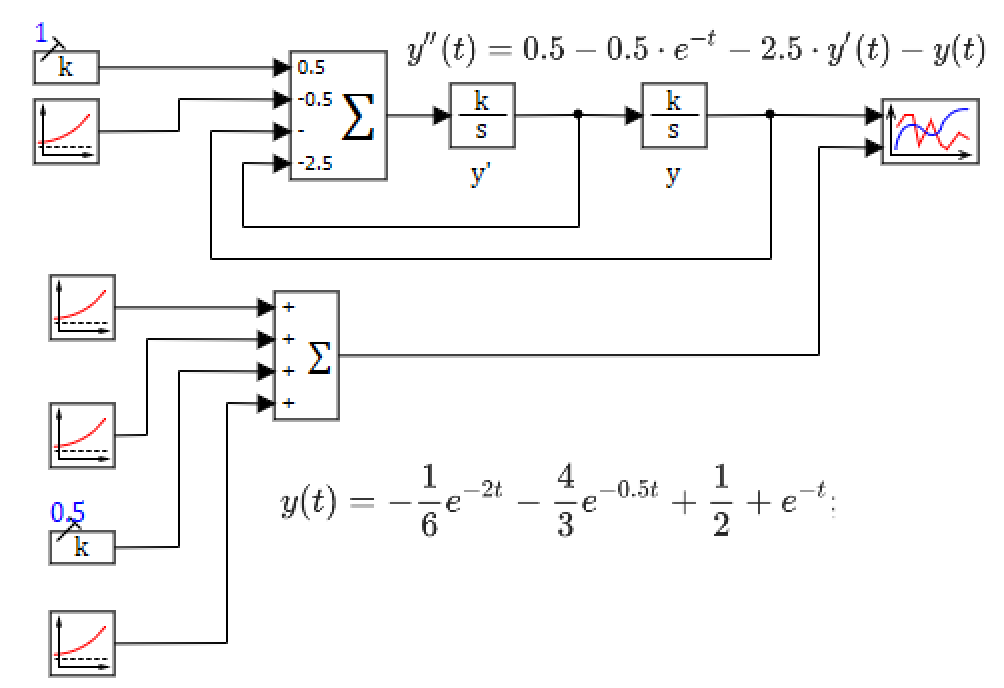
Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).
Электронный учебник по ТАУ (теория автоматического управления)
ТАУ ЛИНЕЙНЫЕ НЕПРЕРЫВНЫЕ МОДЕЛИ И ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ: Модели «вход-выход»
1) Дифференциальные уравнения типовых звеньев и систем
Постановка задачи математического описания линейной САУ
Понятие динамического звена
Дифференциальное уравнение динамического звена
В общем случае ДЗ описывают следующим ОДУ
где x(t) и y(t) – входная и выходная величины ДЗ;
a 2 – a 0 ; b 1 – b 0 – коэффициенты (постоянные) уравнения.
Более употребительны в ТАУ иные формы записи этого ДУ. Обычно уравнение (2.1) записывают в символическом виде
Для решения типовых задач ТАУ дифференциальное уравнение ДЗ (2.1) преобразуют по Лапласу (или Карсону-Хевисайду) заменой оператора дифференцирования p комплексной величиной преобразования Лапласа s = j w . Целью названного преобразования является замена операций дифференцирования и интегрирования оригиналов функций y(t) и x(t) алгебраическими действиями над их изображениями Y(s) и X(s), поскольку уравнение (2.1) преобразуется в алгебраическое
При нулевых начальных условиях p º s.
Если свободные члены a 0 = 1 и b 0 = 1, уравнение (2.3) приобретает нормированный вид .
Такую форму записи ДЗ или САУ называют первой стандартной символической (операторной) формой записи. Уравнения (2.1) — (2.4) относят к уравнениям типа «вход — выход«.
Дифференциальное уравнение САУ
В общем случае замкнутую САУ описывают неоднородным ДУ n-го порядка:
где x(t) – входная (управляющая или возмущающая) величина;
y(t) – выходная (управляемая) величина;
К дифференцирующим звеньям (Д-звено) относят:
– идеальное Д-звено с ПФ
– реальное Д-звено с ПФ .
В таблице 2.1 представлены дифференциальные уравнения и передаточные функции типовых ДЗ.
Типовые соединения динамических звеньев
Сложные элементы и САУ состоят из нескольких соединенных между собой звеньев. Наиболее простыми и часто встречающимися (типовыми) соединениями звеньев являются:
– встречно-параллельное (охват звена обратной связью).
При последовательном соединении ДЗ (рисунок 2.4) выходная величина каждого из звеньев y 1 и y 2 , кроме последнего звена, является входной величиной последующего звена.
Эквивалентная передаточная функция последовательно соединенных l звеньев равна произведению ПФ этих звеньев: .
Эквивалентная ПФ встречно-параллельного соединения звеньев определяется по формуле замыкания
В выражении (2.29) знак «+» соответствует отрицательной ОС, а знак «–» соответствует положительной ОС.
Структурная схема одноконтурной САУ
Алгоритмической структурной схемой САУ называют графическое представление ММ системы в соединении ДЗ, в котором каждой математической операции преобразования сигнала соответствует типовое звено, условно обозначаемое прямоугольником с указанием входных и выходных величин, а так же ПФ этого ДЗ.
Структурная схема типовой одноконтурной САУ показана на рисунке 2.7. На рисунке 2.8 изображена эквивалентная схема типовой САУ.
Очевидно, что эквивалентная схема проще, так как содержит меньше звеньев. Подобного упрощения достигают методом свертки (сущность метода см. п. 2.1.2.6). ПФ звеньев обеих схем связаны согласно (2.27) простейшим образом:
Структурная схема показывает строение САУ, наличие внешних воздействий и точки их приложения, пути распространения воздействий и выходную величину. По существу, структурная схема представляет собой графическую форму ММ САУ, что придает ей наглядность в изображении связей между ДЗ. Это позволяет легко находить по структурной схеме ПФ относительно любых входов и выходов. Для составления структурной схемы САУ необходимо иметь ее функциональную схему (см. п. 1.4) и дифференциальные уравнения или ПФ всех элементов системы.
Передаточные функции САУ
Структурная схема любой одноконтурной САР с любым количеством последовательно или параллельно соединенных звеньев, охваченных местными ОС, может быть сведена к типовой структурной схеме, показанной на рисунке 2.8. Основную ПФ, связывающую изображение выходной величины Y ( s ) с изображением задающего воздействия G ( s ), обозначают Ф( s ): ,
Для следящих систем характерно равенство W yg (s) = W(s). Структурная схема таких САУ показана на рисунке 2.9, а саму САУ называют системой с единичной ОС.
Основная ПФ названной САУ имеет вид .
Таким образом, основная ПФ Ф( s ) определяется по ПФ разомкнутой системы W(s).
Основная ПФ системы Ф(s) характеризует передачу САУ задающего воздействия g(t), его воспроизведение управляемой величиной y (t). Воспроизведение тем лучше, чем ближе Ф(s) к идеальному значению
ПФ разомкнутой САУ определяют по преобразованной структурной схеме САУ (рисунок 2.10). При этом контур регулирования полагают разомкнутым около сумматора и считают все возмущающие воздействия равными нулю (z = 0). ПФ разомкнутой типовой САУ определяется по формуле (2.27):
ПФ разомкнутой САУ W(s) характеризует собственные динамические свойства САУ и позволяет определить ее устойчивость, а так же выбрать корректирующее устройство для улучшения свойств САУ.
В общем случае ПФ разомкнутой САУ представляет собой дробно-рациональную функцию оператора s:
Реальные САУ всегда имеют m . Многочлен A(s) называют характеристическим полиномом разомкнутой САУ, а уравнение A(s) = 0 представляет собой характеристическое уравнение разомкнутой САУ
ПФ разомкнутой САУ обычно записывают в стандартной форме, при которой полиномы B(s) и A(s) имеют свободные члены и , т.е.
Величину v называют порядком астатизма САУ относительно задающего воздействия g(t).
Статические САУ характеризуются v = 0 и имеют ПФ вида .
Астатические САУ характеризуются астатизмом v ¹ 0. В случае v = 1 разомкнутая система имеет ПФ вида
так как свободный член полинома знаменателя A(s) равен нулю (a 0 = 0). Замкнутую САУ при этом называют астатической САУ первого порядка. Такая система содержит в прямой цепи одно И-звено. САУ с двумя И‑звеньями (v = 2) называют астатической САУ второго порядка.
Для определения влияния возмущения z(t) на управляемую величину y (t) структурную схему типовой САУ (рисунок 2.8) следует представить в виде, показанном на рисунке 2.11.
При этом звено с ПФ W 2 ( s ) образует собой прямую цепь, звенья с ПФ W 1 ( s ) и W 3 ( s ) – обратную связь. Тогда в соответствии с (2.29) ПФ замкнутой САУ по возмущению
что позволяет «свернуть» структурную схему САУ (рисунок 2.12) и изобразить САУ звеном с эквивалентной ПФ (2.40).
F z ( s )
ПФ F z ( s ) показывает влияние возмущения z(t) на управляемую величину y (t). Возмущение отклоняет её от заданного значения g (t) и уменьшает точность воспроизведения задающего воздействия. Это отрицательное влияние возмущения тем меньше, чем ближе F z ( s ) к идеальному значению F z ( s ) = 0.
При одновременном приложении к линейной САУ управляющего g(t) и возмущающего z(t) воздействий в соответствии с принципом наложения изображение регулируемой величины определяется следующим образом:
При исследовании САУ часто интересуются значением ошибки регулирования (1.1):
ПФ замкнутой САУ по ошибке определяется по следующей формуле:
Структурная схема системы с ПФ F e ( s ) вида (2.41) показана на рисунке 2.13. При этом считают, все внешние воздействия z(t) = 0, исключая задающее воздействие g (t).
Передаточная функция F e ( s ), как и F ( s ), характеризует воспроизведение управляемой величиной y (t) задающего воздействия g (t) (отработку задания). Воспроизведение тем лучше, чем ближе F e ( s ) к идеальному значению F e ( s ) = 0.
ПФ САУ по ошибке (2.41) позволяет рассчитать значение статической ошибки системы по следующей формуле:
Часто статическую ошибку принимают за оценку точности статической САУ.
Эквивалентные преобразования структурных схем
Структурную схему любой сложности путем последовательных преобразований можно привести к эквивалентной одноконтурной (рисунок 2.14). Условием эквивалентности является сохранение в процессе преобразований зависимости основных величин y(t), e (t) и y ос (t) от внешних воздействий z (t).
Эквивалентные преобразования структурных схем осуществляют по соответствующим правилам в следующей последовательности. Прежде всего каждое имеющееся в схеме типовое соединение звенев заменяют эквивалентным звеном. Затем целесообразно выполнить перенос точек разветвления (узлов) в соответствии с рисунком 2.15 и сумматоров в соответствии с рисунком 2.16, чтобы в преобразованной таким образом схеме образовались новые типовые соединения звеньев. Эти соединения опять должны быть заменены эквивалентными звеньями. Узел может быть перенесен назад через звено W 1 ( s ) или вперед через звено W 2 ( s ). В первом случае в ответвление включают звено с ПФ W 1 ( s ), во втором – звено с ПФ 1/ W 2 ( s ). Подобным образом поступают при переносе сумматора.
Таким образом, указанные правила позволяют преобразовать сложные структурные схемы многоконтурных САУ с перекрещивающимися связями, а также с несколькими входами и выходами. Преобразование структурных схем позволяет определить ПФ САУ любой сложности.
Типовые воздействия
Работа многих САУ сопровождается резкими изменениями внешних воздействий (например, уменьшением или увеличением нагрузки и т.п.). Важно оценить поведение САУ в таких ситуациях, т.е. выяснить, насколько значительным будет отклонение от нормального режима работы и насколько быстро и точно оно будет устранено регулятором. Для того, чтобы сравнить поведение при этом различных САУ и элементов, рассматривают строго определенное, нормированное, изменение воздействий. Таким типовым изменением воздействия считают мгновенное его изменение от нуля до единицы. Для математической записи используют единичную ступенчатую функцию (функцию Хевисайда):
Другим часто встречающимся изменением внешних воздействий являются их кратковременные, но значимые всплески, импульсы. Например, ударная нагрузка на двигатель, порывы ветра, действующие на летательный аппарат и т.п. Нормированным (стандартным) импульсным воздействием считают единичный импульс, т.е. импульс, произведение длительности которого на его амплитуду равно единице.
Предел, к которому стремится единичный импульс, когда его продолжительность стремится к нулю T ® 0, есть единичная импульсная функция ( d -функция или функция Дирака):
Приблизительно d -функцию можно представить как очень узкий прямоугольный импульс длительности T и амплитуды около начала координат (рисунок 2.18), так что его площадь (интеграл) равна единице: .
Это равенство описывает основное свойство d -функции. Кроме того, считают, что d -функция равна первой производной единичной ступенчатой функции
Рассмотренные воздействия относят к динамическим, так как с их помощью анализируют динамические свойства САУ (см. п. 2.14).
Свойства элементов и САУ оценивают также в установившихся режимах. Для этого к системе или элементу прикладывают периодическое воздействие. Наиболее часто используют гармоническое воздействие вида
Такой выбор обусловлен тем, что любое реальное периодическое воздействие может быть представлено рядом гармонических составляющих (рядом Фурье): .
Реакцию линейной САУ на реальное воздействие определяют методом наложения (суперпозиции).
Временн Ï е характеристики динамических звеньев и САУ
К временн Ï м (динамическим) характеристикам САР относят переходную и импульсную характеристики.
Переходной характеристикой (функцией) h(t) называют функцию, описывающую аналитически или графически изменение выходной величины звена или САУ y(t), вызванное единичным ступенчатым воздействием x ( t ) = 1( t ) на входе звена или САУ при нулевых начальных условиях. Другими словами h(t) есть реакция звена или САУ на единичное ступенчатое воздействие при нулевых начальных условиях. Переходные характеристики и функции типовых ДЗ представлены в таблице 2.2.
Импульсной характеристикой (функцией) или весовой характеристикой звена или САУ w(t) называют характеристику, описывающую реакцию ДЗ или САУ на единичное импульсное воздействие на входе звена или САУ при нулевых начальных условиях. Импульсные характеристики и функции типовых ДЗ представлены в таблице 2.3
Частотные характеристики
В тех случаях, когда протекающие процессы в САУ изучены слабо, и вывод ДУ, описывающих эти САУ, затруднен, в основу математического моделирования кладут не уравнения движения, а так называемые частотные характеристики (ЧХ) систем.
Частотные характеристики динамических звеньев
Если на вход стационарного ДЗ (рисунок 2.1) действует гармонический сигнал то на выходе ДЗ установится также гармонической сигнал той же угловой частоты w , но с измененными амплитудой Y m и начальной фазой y 2 (рисунок 2.19). Эти изменения зависят как от свойств самого ДЗ, так и от угловой частоты входного воздействия.
Отношение амплитуд выходного и входного сигналов
разность их фаз
j ( w ) = y 2 — y 1
являются функциями частоты. Их называют соответственно амплитудно-частотной характеристикой (АЧХ) и фазово-частотной характеристикой (ФЧХ) звена.
Эти характеристики показывают, что линейное ДЗ изменяет амплитуду и фазу гармонического сигнала: в установившемся режиме амплитуда уменьшается или увеличивается в A раз, а фазовый сдвиг уменьшается или увеличивается на j градусов (радиан) при изменении угловой частоты w . Частотные характеристики зависят от свойств ДЗ, но не зависят от амплитуды и фазы входного воздействия. АЧХ может служить для оценки фильтрующих свойств, а ФЧХ – инерционных свойств ДЗ.
Частотные характеристики всякого элемента САУ связаны с его ПФ W ( s ). Подставляя в выражение ПФ вместо оператора Лапласа s мнимую величину j w , получают комплексную функцию частоты W(j w ), которую называют частотной передаточной функцией. Эта функция при любой частоте w является комплексной величиной и поэтому может быть представлена в показательном виде
Следовательно, модуль и аргумент частотной ПФ определяют соответственно АЧХ и ФЧХ звена.
Частотная ПФ, как комплексная функция, может быть также представлена и в алгебраическом виде
где U ( w ); V ( w ) – функции частоты, называемые соответственно вещественной (действительной) и мнимой ЧХ.
Они не имеют конкретного физического смысла, но используются в расчетах и определяются по формулам:
Частотные характеристики связаны между собой известными соотношениями (рисунок 2.20):
Если частотная ПФ задана в алгебраическом виде (2.55), преобразование ее к показательному виду (2.52) осуществляют по формулам (2.58). Соотношения (2.59) позволяют осуществить при необходимости обратное преобразование.
Кроме аналитического описания ЧХ изображают графически в декартовых координатах. Построение АЧХ и ФЧХ осуществляют по формулам (2.53) и (2.54). На рисунках 2.21 и 2.22 изображены в самом общем виде соответственно АЧХ и ФЧХ обыкновенных инерционных ДЗ или САУ. В таблице 2.4 приведены АЧХ и ФЧХ типовых ДЗ.
К обычным ЧХ относят амплитудно-фазовую частотную характеристику (АФЧХ). АФЧХ представляет собой годограф частотной ПФ W(j w ), т.е. геометрическое место концов вектора W(j w ) при изменении частоты w от 0 до ± ¥ . Эту характеристику строят на комплексной плоскости в полярных ( A , w ) или декартовых ( U , V ) координатах конца вектора W(j w ) по формулам (2.52), (2.53) или (2.55), (2.56).
Типичный годограф W(j w ) обыкновенного инерционного ДЗ показан на рисунке 2.20 в диапазоне частот — ¥ w + ¥ . Рабочая ветвь годографа соответствует физически реализуемым положительным частотам w ³ 0. Фазовые углы j ( w ) отсчитывают от положительной действительной полуоси (+1) против движения часовой стрелки. Инерционные звенья характеризуются отрицательными фазовыми углами j ( w ) Логарифмические частотные характеристики
Логарифмические амплитудно-частотная (ЛАЧХ) и фазово-частотная (ЛФЧХ) характеристики удобны тем, что небольшим графиком может быть охвачен широкий диапазон частот. При этом одинаково наглядно изменение частотных свойств как на малых, так на средних и высоких частотах.
Небольшим графиком охватывается и широкий диапазон изменения амплитуды при одинаковой наглядности изменения больших и малых амплитуд.
В качестве примера на рисунках 2.23 и 2.24 показаны АЧХ одного и того же А-звена первого порядка (k = 1 и T = 10) в диапазонах частот, отличающихся только на один порядок. По второму графику практически не возможно судить о свойствах исследуемого ДЗ в области малых частот w
Для сравнения на рисунке 2.25 изображена ЛАЧХ указанного А-звена в диапазоне частот 0 w 4. Очевидно, что ЧХ, построенная в логарифмических координатах, точно передает характер исследуемой зависимости на всех частотах. Кроме того, значительные непрямолинейные участки ЛАЧХ с большой точностью могут быть заменены прямыми линиями – асимптотами. В этом случае ЛАЧХ изображают отрезками прямых (асимптот) и называют асимптотической или приближенной ЛАЧХ (рисунок 2.26).
Асимптоты имеют отрицательный и положительный наклон, кратный 20 дБ на декаду. Для построения асимптотической ЛАЧХ проводят простые вычисления, так как любую асимптоту можно построить по двум точкам. При построении ЛАЧХ (рисунок 2.25) по оси абсцисс откладывают частоту в логарифмическом масштабе, т.е. наносят отметки, соответствующие lg W , где – относительная частота. Однако около этих отметок указывают частоты w . Отрезок оси абсцисс, соответствующий изменению частоты в 10 раз, называют декадой ( ), а отрезок, соответствующий изменению частоты в два раза, – октавой ( ). Декада и октава – равномерные единицы на оси абсцисс. Нуль оси обсцисс лежит слева в бесконечности, так как lg0 = — ¥ . Поэтому при построении ЛАЧХ выбирают такой отрезок оси абсцисс, который охватывает требуемый диапазон частот ( w 1 , w 2 ), например, полосу пропускания (0, w п ). В качестве «базовой» частоты w 2 удобно в этом случае принять частоту среза, т.е. w 2 = w ср (рисунок 2.21). По оси ординат ЛАЧХ откладывают в равномерном масштабе в децибеллах (дБ) логарифмическую амплитуду
Децибелл является единицей логарифмической относительной величины. Изменение отношения двух амплитуд в 10 раз ( ) соответствует изменению усиления на 20 дБ (см. таблицу 2.5).
ЛФЧХ имеет такую же ось абсцисс, что и ЛАЧХ. По оси ординат ЛФЧХ откладывают в равномерном масштабе угол фазового сдвига j . Оси абсцисс ЛФЧХ и ЛАЧХ обычно совмещают, чтобы изменения фазы можно было сопоставлять с изменениями амплитуды.
Точные и приближенные (асимптотические) ЛАЧХ типовых ДЗ приведены в таблице 2.6.
В англоязычной технической литературе и современных математических системах (M A TLAB, Maple и др.) ЛАЧХ и ЛФЧХ называют диаграммами Боде ( Bode diagramms ).
Понятие об идентификации
Идентификацией динамической системы называют получение или уточнение по экспериментальным данным ММ этой системы. ММ может быть выражена ДУ, ПФ и т.п. Получение ММ в таком виде составляет задачу непараметрической идентификации. Параметры модели являются результатом параметрической идентификации.
Классическими методами непараметрической идентификации линейных САУ или ее элементов являются:
– метод временн Ï х характеристик;
– метод частотных характеристик;
– метод корреляционных функций.
К прямым методам параметрической идентификации относят:
– метод наименьших квадратов;
– метод сумм произведений и др.
Выбор того или иного метода идентификации и оценки параметров ММ зависит от априорной информации об объекте исследования и требованиях, предъявляемых к ММ. На практике чаще используют метод временн Ï х характеристик как более простой в организации эксперимента. Если эксперимент проводят для получения переходной характеристики h(t), метод называют методом переходных характеристик (функций). Традиционно объединяют метод переходных характеристик с регрессионным анализом, основу которого составляет метод наименьших квадратов (МНК). Созданная таким образом ММ является регрессионной моделью, качество которой гарантированно статистически.
Сущность метода переходных характеристик заключается в следующем. До начала эксперимента изучают объект идентификации и разрабатывают программу его исследования, а также оценивают возможность считать объект линейным, стационарным, с сосредоточенными параметрами. Названные допущения позволяют описать динамические свойства исследуемого объекта ОДУ (2.5) или ПФ. Если объектом идентификации является элемент САУ, то по его физическим свойствам предварительно выбирают ММ из числа типовых ДЗ (см. п. 2.1.2.2). Затем проводят активный эксперимент. Для этого сначала приводят исследуемый объект в исходное установившееся состояние. После этого ступенчато изменяют входное воздействие на D x и регистрируют соответствующее изменение во времени выходной величины D y = f ( t ). Эту зависимость называют разгонной характеристикой (см. п. 3.2) и обозначают y ( t ). По достижении объектом нового установившегося состояния прекращают эксперимент. Полученную экспериментально разгонную характеристику y ( t ) аппроксимируют теоретической переходной функцией h ( t ). Эта функция является решением ОДУ, принятого в качестве ММ объекта идентификации. Аппроксимирующую переходную функцию h ( t ) выбирают первоначально из переходных функций типовых ДЗ (см. таблицу 2.2) при условии наибольшего соответствия характеристик y ( t ) и h ( t ) друг другу. Типовое ДЗ, переходная функция которого выбрана в качестве аппроксимирующей, таким образом, принимается в качестве ММ исследуемого объекта. Определяется порядок ОДУ, решением которого является аппроксимирующая характеристика h ( t ). Уравнение характеристики h ( t ) записывают в явном виде (см. таблицу 2.1). В этом уравнении неизвестными остаются только коэффициенты. Их находят решением обратной задачи: по известным значениям функции h ( t ) и соответствующим им значениям аргумента (времени t ) рассчитывают неизвестные коэффициенты. Эта задача является оптимизационной в том смысле, что искомые коэффициенты должны обеспечить минимум расхождения между характеристиками h ( t ) и y ( t ). В качестве критерия расхождения чаще всего принимают минимум суммы квадратов ошибок по всей совокупности измерений (принцип Лежандра):
Этот метод называют методом наименьших квадратов (МНК). С его помощью строят уравнение регрессии h ( t ), которым аппроксимируют разгонную характеристику y ( t ). Идентификация будет полной, если будет доказана адекватность принятой ММ. Названную модель считают адекватной, если расхождение между характеристиками h ( t ) и y ( t ) является незначительным в статистическом смысле. Оценку адекватности уравнения регрессии в целом проводят по F -критерию Фишера. При положительном результате проверки уравнения регрессии оценивают значимость его коэффициентов по t -критерию Стьюдента. Одновременно коэффициенты уравнения регрессии являются коэффициентами ММ.
Дифференцирующее звено

В теории автоматического регулирования различают реальное дифференцирующее звено и идеальное дифференцирующее звено.
Идеальное дифференцирующее звено
Давайте для начала рассмотрим идеальное дифференцирующее звено, типовое дифференциальное уравнение которого имеет вид:

Операторная форма записи имеет следующий вид:

Передаточная функция идеального дифференцирующего звена имеет вид:

Аналитическое выражение вектора амплитудо-фазовой характеристики (АФХ) для идеального дифференцирующего звена имеет вид:

В последнем выражении при изменении частоты от 0 до ∞ легко построить график вектора АФХ идеального дифференцирующего звена (рисунок 1 а)). Конец вектора АФХ перемещается по положительной мнимой полуоси комплексной плоскости от начала координат, уходя при ω = ∞ в бесконечность.
Идеальное дифференцирующее звено имеет своеобразную переходную функцию (рисунок 1 б)). Выходной сигнал данного звена пропорционален тангенсу угла наклона вектора АФХ, то есть первой производной. Угол равен +90 0 в момент подачи входного воздействия, а tg(+90 0 ) = +∞, но далее входное воздействие становится равным единице, при этом угол наклона изменяется на -90 0 , а tg(-90 0 ) = -∞.
Откуда следует, что в момент подачи входного сигнала выходной сигнал идеального дифференцирующего звена примет значение +∞. Тут же из +∞ вычитается -∞ и выходной сигнал снова принимает нулевое значение (рисунок 1б)).
Примером электрической реализации идеального дифференцирующего звена может послужить электрическая цепь, состоящая из резистора R и конденсатора С, при этом резистор R обладает сверхпроводимостью (R = 0). Схема данной RC цепочки показана на рисунке 1 в).
Реальное дифференцирующее звено
Типовое дифференциальное уравнение для реального дифференцирующего звена имеет вид:

Операторная форма данного уравнения:

хвых (р) можно вынести за скобки:

После чего получить аналитическое выражение передаточной функции реального дифференцирующего звена:

Совершив замену p на jω в передаточной функции, получим аналитическое выражение вектора АФХ для данного звена:

Изменяя частоту после ω проведенных алгебраических преобразований от 0 до ∞ в мнимой in(ω) и действительной m(ω) частях вектора амплитудо- фазовой характеристики (АФХ), построим годограф реального дифференцирующего звена (рисунок 2 а).
В знаменателе m(ω) при ω = ∞ единицу можно отбросить, тогда можно сократить дробь:

Отсюда получим, что m(ω) = k / T0.
Следовательно, графиком вектора АФХ реального дифференцирующего звена будет полуокружность в первом квадранте комплексной плоскости, диаметр которой будет равен k / T0.
На рисунке 2 б) показана переходная функция реального дифференцирующего звена. На рисунке видно, что при подаче возмущения в виде единичного скачка выходной сигнал мгновенно увеличится на величину k / T0, после чего начнет плавно уменьшаться (по нелинейному закону) пока его значение не станет равным нулю. По переходной характеристике не сложно определить коэффициенты k и T0 передаточной функции. Сначала с помощью касательной находят значение T0, после чего умножив ординату величины k / T0 на T0, определяют значение k.
В качестве примера электрической реализации реального дифференцирующего звена может послужить RC цепочка, в которой сопротивление R ≠ 0, что вполне может быть собрано из существующих элементов.
http://tau-predmet.narod.ru/tau2-1-modeli_vhod-vihod.html
http://elenergi.ru/differenciruyushhee-zveno-peredatochnaya-funkciya-i-sxema.html