Однородная система линейных уравнений
Рассмотрим систему линейных уравнений (СЛУ):
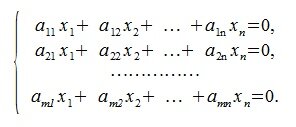
Представим (1) в матричном виде:
где A m×n матрица, x вектор столбец порядка n , 0 — нулевой вектор столбец порядка m.
СЛУ (1) (или (2)) называется однородной системой линейных уравнений, т.к. правая часть системы равна нулю.
Однородная система линейных уравнений всегда совместна, т.к. вектор 0 всегда является решением системы (1):
Это решение называется нулевым или тривиальным решением.
- Cистема линейных однородных уравнений имеет ли другие решения, кроме нулевого.
- При каких условиях система линейных однородных уравнений имеет нетривиальное решение.
- Как найти множество всех решений системы однородных линейных уравнений.
Если A n×n матрица и rank( A)= n, то нулевой вектор является единственным решением системы (1), в противном случае система имеет множество решений.
Обшее решение однородной системы линейных уравнений
Пусть A m×n — матрица rank A=r. В общем случае можем предположить что r r столбцов матрицы A линейно независимы. Для удобства записи предположим, что это первые r столбцы матрицы A. Переставляя строки матрицы можно добиться того, чтобы подматрица матрицы A порядка r×r, расположенная в левом верхнем углу, была невырожденной. Запишем систему (2) в блочном виде:
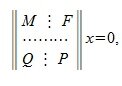
где M — r×r — матрица, rang M=r.
Применяя метод исключения Гаусса для системы (3), получим:
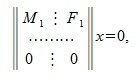
где M1 верхняя треугольная матрица, 0 — нулевые матрицы соответствующих порядков. Далее, применяя обратный ход исключения Гаусса, и, далее, разделив элементы каждой строки на ведущий элемент этой строки (если ведущий элемент существует) получим:
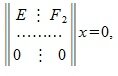
где E — единичная матрица порядка r×r.
где F2— r×(n-r) — матрица, E n-r — единичная матрица порядка n-r, X — матрица порядка n×(n-r).
В уравнении (5) вместо x подставляя матрицу (6), получим:

Таким образом, векторы столбцы матрицы X являются решением системы (2) (или (1)). Более того, эти векторы линейно независимы и их линейная комбинация также является решением (2).
Общее решение системы однородных линейных уравнений имеет следующий вид:
гдe k — произвольный вектор столбец порядка n-r.
Общее решение системы однородных линейных уравнений можно также записать в следующем виде:

где xi — i-ый вектор-столбец матрицы X, а ki — i-ая координата вектора k
Множество всех решений (8)(или (9)) образует ядро или нуль пространство матрицы A и обозначается через Ker (A) или N(A).
В начале этого параграфа мы предполагали, что линейные независимые r векторы столбцы расположены в начале матрицы A. В общем случае, если они расположены в произвольных местах, аналогично вышеизложенному, применяя метод Гаусса, затем обратный ход Гауссова исключения и, наконец , разделив элементы каждой строки на ведущий элемент этой строки (если ведущий элемент существует), получим

Сделаем замену переменных:

где P -матрица перестановок поядка n×n выбрана так, чтобы при подстановке (11) в (10) получили:

где E — единичная матрица порядка r×r.
Аналогично вышеизложенному векторы столбцы матрицы X’:
образуют множесво всех решений однородной системы линейных уравнений (12).
Учитывая (11) получим:
Общее решение системы однородных линейных уравнений имеет следующий вид:

гдe k — произвольный вектор столбец порядка n-r.
Общее решение системы однородных линейных уравнений можно также записать в следующем виде:

где qi — i-ый вектор-столбец матрицы Q, а ki — i-ая координата вектора k
Нахождение общего решения однородной системы линейных уравнений с помощью псевдообратной матрицы
Если rank(A)= r, r общее решение можно представить в следующем виде:
где E —единичная матрица, A + — псевдообратная к A матрица.
Для проверки подставим (16) в (2):
Ax=A(E−A + A)z=(A−AA + A)z=(A−A)z=0.
Ранг матрицы rank( E−A + A)= n-r. Следовательно столбцы матрицы E−A + A образуют множество всех решений системы (2).
Отметим, что r столбцов матрицы E−A + A линейно зависимы. Для исключения линейно зависимых столбцов можно сделать скелетное разложение. Тогда E−A + A= QS, где Q n×n−r — матрица rank (Q)=n−r, S n−r×n-матрица rank (S)=n−r. Тогда множество всех решений однородной системы линейных уравнений примет следующий вид:
Решение однородной системы линейных уравнений онлайн
Для решения однородной системы линейных уравнений пользуйтесь онлайн калькулятором который решает однородную систему по шагам и находит полное решение.
Системы линейных алгебраических уравнений: основные понятия, виды
Определение СЛАУ
Системой линейных алгебраических уравнений (СЛАУ) называется система вида:
$$\left\<\begin
Упорядоченный набор значений $$\left\
Задание. Проверить, является ли набор $<0,3>$ решением системы $\left\<\begin
Решение. Подставляем в каждое из уравнений системы $x=0$ и $y=3$:
$$5 x+y=3 \Rightarrow 5 \cdot 0+3=3 \Rightarrow 3=3$$
Так как в результате подстановки получили верные равенства, то делаем вывод, что заданный набор является решением указанной СЛАУ.
Ответ. Набор $<0,3>$ является решением системы $\left\<\begin
Виды систем
СЛАУ называется совместной, если она имеет, хотя бы одно решение.
В противном случае система называется несовместной.

Система $\left\<\begin
Система $\left\<\begin
Система называется определённой, если она совместна и имеет единственное решение.
В противном случае (т.е. если система совместна и имеет более одного решения) система называется неопределённой.
Система называется однородной, если все правые части уравнений, входящих в нее, равны нулю одновременно.
Система называется квадратной, если количество уравнений равно количеству неизвестных.
Система $\left\<\begin
Матричная запись систем уравнений
Исходную СЛАУ можно записать в матричном виде:
Задание. Систему $\left\<\begin
Решение. Заданную СЛАУ записываем в матричной форме $A. X=B$ , где матрица системы:
$$A=\left(\begin
то есть, запись СЛАУ в матричной форме:
$$\left(\begin
Расширенная матрица системы
Задание. Записать матрицу и расширенную матрицу системы $\left\<\begin
Решение. Матрица системы $A=\left(\begin
Системы линейных уравнений: основные понятия
— это объединение из n линейных уравнений, каждое из которых содержит k переменных. Записывается это так:
Многие, впервые сталкиваясь с высшей алгеброй, ошибочно полагают, что число уравнений обязательно должно совпадать с числом переменных. В школьной алгебре так обычно и бывает, однако для высшей алгебры это, вообще говоря, неверно.
— это последовательность чисел ( k 1, k 2, . kn ), которая является решением каждого уравнения системы, т.е. при подстановке в это уравнение вместо переменных x 1, x 2, . xn дает верное числовое равенство.
Соответственно, решить систему уравнений — значит найти множество всех ее решений или доказать, что это множество пусто. Поскольку число уравнений и число неизвестных может не совпадать, возможны три случая:
- Система несовместна, т.е. множество всех решений пусто. Достаточно редкий случай, который легко обнаруживается независимо от того, каким методом решать систему.
- Система совместна и определена, т.е. имеет ровно одно решение. Классический вариант, хорошо известный еще со школьной скамьи.
- Система совместна и не определена, т.е. имеет бесконечно много решений. Это самый жесткий вариант. Недостаточно указать, что «система имеет бесконечное множество решений» — надо описать, как устроено это множество.
Переменная xi называется , если она входит только в одно уравнение системы, причем с коэффициентом 1. Другими словами, в остальных уравнениях коэффициент при переменной xi должен быть равен нулю.
Если в каждом уравнении выбрать по одной разрешенной переменной, получим набор разрешенных переменных для всей системы уравнений. Сама система, записанная в таком виде, тоже будет называться разрешенной. Вообще говоря, одну и ту же исходную систему можно свести к разным разрешенным, однако сейчас нас это не волнует. Вот примеры разрешенных систем:

Обе системы являются разрешенными относительно переменных x 1, x 3 и x 4. Впрочем, с тем же успехом можно утверждать, что вторая система — разрешенная относительно x 1, x 3 и x 5. Достаточно переписать самое последнее уравнение в виде x 5 = x 4.
Теперь рассмотрим более общий случай. Пусть всего у нас k переменных, из которых r являются разрешенными. Тогда возможны два случая:
- Число разрешенных переменных r равно общему числу переменных k : r = k . Получаем систему из k уравнений, в которых r = k разрешенных переменных. Такая система является совместной и определенной, т.к. x 1 = b 1, x 2 = b 2, . xk = bk ;
- Число разрешенных переменных r меньше общего числа переменных k : r k . Остальные ( k − r ) переменных называются свободными — они могут принимать любые значения, из которых легко вычисляются разрешенные переменные.
Так, в приведенных выше системах переменные x 2, x 5, x 6 (для первой системы) и x 2, x 5 (для второй) являются свободными. Случай, когда есть свободные переменные, лучше сформулировать в виде теоремы:
Обратите внимание: это очень важный момент! В зависимости от того, как вы запишете итоговую систему, одна и та же переменная может быть как разрешенной, так и свободной. Большинство репетиторов по высшей математике рекомендуют выписывать переменные в лексикографическом порядке, т.е. по возрастанию индекса. Однако вы совершенно не обязаны следовать этому совету.
Теорема. Если в системе из n уравнений переменные x 1, x 2, . xr — разрешенные, а x r + 1, x r + 2, . x k — свободные, то:
- Если задать значения свободным переменным ( x r + 1 = t r + 1, x r + 2 = t r + 2, . xk = tk ), а затем найти значения x 1, x 2, . xr , получим одно из решений.
- Если в двух решениях значения свободных переменных совпадают, то значения разрешенных переменных тоже совпадают, т.е. решения равны.
В чем смысл этой теоремы? Чтобы получить все решения разрешенной системы уравнений, достаточно выделить свободные переменные. Затем, присваивая свободным переменным разные значения, будем получать готовые решения. Вот и все — таким образом можно получить все решения системы. Других решений не существует.
Вывод: разрешенная система уравнений всегда совместна. Если число уравнений в разрешенной системе равно числу переменных, система будет определенной, если меньше — неопределенной.
И все бы хорошо, но возникает вопрос: как из исходной системы уравнений получить разрешенную? Для этого существует метод Гаусса.
http://www.webmath.ru/poleznoe/formules_5_1.php
http://www.berdov.com/works/algebra/system_of_linear_equations/