Евклидовы пространства
Определение евклидова пространства
Вещественное линейное пространство [math]\mathbb
0\quad \forall \mathbf
\forall \lambda\in \mathbb
В скалярном произведении [math]\langle\mathbf, \mathbf
Линейные операции над векторами евклидова пространства удовлетворяют аксиомам 1–8 линейного пространства, а операция скалярного умножения векторов удовлетворяет аксиомам 1–4 скалярного произведения. Можно сказать, что евклидово пространство — это вещественное линейное пространство со скалярным произведением. Поскольку евклидово пространство является линейным пространством, на него переносятся все понятия, определенные для линейного пространства, в частности, понятия размерности и базиса.
Простейшие следствия из аксиом скалярного произведения
1. Аксиомы 2 и 3 скалярного произведения можно заменить одним условием линейности скалярного произведения по первому сомножителю:
\forall \alpha,\beta\in \mathbb
2. Условие линейности скалярного произведения по первому сомножителю в силу симметричности (аксиома 1) справедливо и для второго сомножителя, т.е. скалярное произведение линейно по любому сомножителю.
3. Линейность скалярного произведения по любому сомножителю распространяется на линейные комбинации векторов:
для любых векторов [math]\mathbf_i,\,\mathbf
4. Если хотя бы один сомножитель — нулевой вектор, то скалярное про изведение равно нулю:
Действительно, представим нулевой вектор в виде [math]\mathbf
Неравенство Коши-Буняковского
Для любых векторов [math]\mathbf[/math] и [math]\mathbf
В самом деле, для любого действительного числа [math]\lambda[/math] и любых векторов [math]\mathbf[/math] и [math]\mathbf
Следовательно, дискриминант квадратного трехчлена (переменной [math]\lambda[/math] ) не больше нуля, т.е. [math]4 \langle \mathbf,\mathbf
Примеры евклидовых пространств
Определяя для элементов линейного пространства операцию скалярного произведения, получаем евклидово пространство. Если скалярное произведение можно ввести разными способами в одном и том же линейном пространстве, то и получаемые евклидовы пространства будут разными. Приведем примеры евклидовых пространств, соответствующих рассмотренным ранее примерам линейных пространств.
1. В нулевом линейном пространстве [math]\<\mathbf
2. В пространствах [math]V_1,\,V_2,\,V_3[/math] векторы (свободные или радиус- векторы) рассматриваются как направленные отрезки. В курсе элементарной геометрии вводятся понятия длины вектора и величины угла между векторами, а затем определяется скалярное произведение: [math]\langle \vec,\vec
3. В пространстве [math]\mathbb
где [math]A[/math] — квадратная симметрическая положительно определенная матрица n-го порядка. Проверим выполнение аксиом 1-4. Аксиома 1 (симметричность) выполняется в силу симметричности матрицы [math]A:[/math] [math]\langle x,y\rangle= x^TAy= y^TA^Tx= y^TAx= \langle y,x\rangle[/math] , поскольку число при транспонировании не изменяется, т.е. [math]x^TAy=y^TA^Tx[/math] . Свойство линейности по первому сомножителю (см. п.1 простейших следствий из аксиом) для (8.26) выполняется:
Значит, выполняются аксиомы 2 и 3. Аксиома 4 также выполняется, так как квадратичная форма [math]\langle x,x\rangle= x^TAx[/math] положительно определенная. Таким образом, пространство [math]\mathbb
Это скалярное произведение считается стандартным в пространстве [math]\mathbb
Приведем примеры формул, которые не задают скалярного произведения в [math]\mathbb
1) [math]\langle x,y\rangle= |x_1|\cdot|y_1|+|x_2|\cdot|y_2|[/math] — аксиомы 1, 4 выполняются, а аксиомы 2, 3 — нет;
2) [math]\langle x,y\rangle=x_2\cdot y_2[/math] — аксиомы 1, 2, 3 выполняются, а аксиома 4 — нет.
4. Пространство [math]\
5. В пространстве [math]C[a,b][/math] действительных функций, определенных и непрерывных на данном промежутке [math][a,b][/math] , скалярное произведение можно задать формулой:
Таким образом, пространство [math]C[a,b][/math] со скалярным произведением (8.28) является евклидовым. Скалярное произведение (8.28) считается стандартным в пространстве [math]C[a,b][/math] . Для разрывных функций формула (8.28) не определяет скалярного произведения, так как нарушается аксиома 4. Неравенство (8.25) Коши-Буняковского в пространстве [math]C[a,b][/math] со скалярным произведением (8.28) трансформируется в неравенство Шварца :
6. В пространстве [math]P(\mathbb
В пространстве [math]P_n(\mathbb
Выражение в правой части (8.29) симметрично для коэффициентов двух многочленов, поэтому аксиома 1 выполняется. Аксиомы 2, 3 следуют из линейности выражения по коэффициентам каждого многочлена. Проверим аксиому 4. Запишем скалярный квадрат [math]\langle p,p\rangle= a_n^2+\ldots+ a_1^2+ a_0^2\geqslant0[/math] . Заметим, что [math]\langle p,p\rangle=0[/math] только при [math]a_n=\ldots=a_1=a_0=0[/math] , т.е. в случае нулевого много члена [math]p(x)\equiv0[/math] . Следовательно, формула (8.29) задает скалярное произведение в пространстве [math]P_n(\mathbb
В пространстве [math]P_3(\mathbb
В силу симметричности и линейности правой части (8.30) по значениям многочленов, заключаем, что аксиомы 1-3 выполняются. Проверим выполнение аксиомы 4. Приравняв скалярный квадрат нулю, получаем
Это возможно только при [math]p(1)=p(2)=p(3)=0[/math] . Из этих трех равенств не следует, однако, что многочлен [math]p(x)[/math] нулевой. Например, ненулевой многочлен [math]p(x)=(x-1)(x-2)(x-3)[/math] удовлетворяет трем равенствам. Следовательно, в пространстве [math]P_3(\mathbb
Длина вектора и угол между векторами в евклидовом пространстве
Длиной (нормой) вектора [math]\mathbf
Имея в виду обозначение, длину [math]|\mathbf
Углом между ненулевыми векторами [math]\mathbf[/math] и [math]\mathbf
Представив неравенство Коши-Буняковского (8.25) в виде [math]\bigl|\langle \mathbf,\mathbf
Длина вектора и угол между векторами называются основными метрическими понятиями .
Из неравенства Коши-Буняковского (8.25) следует неравенство треугольника :
Докажем последнее неравенство. Применяя оценку [math]\langle \mathbf,\mathbf
то есть [math]|\mathbf+\mathbf
Пример 8.17. Даны векторы евклидовых пространств:
y=\begin
y=\begin
g(x)=\cos
q(x)=x+2[/math] — элементы пространства [math]P_2(\mathbb
q(x)=x+2[/math] — элементы пространства [math]P_2(\mathbb
В каждом пространстве найти длины двух данных векторов и угол между ними.
Решение. а) Находим скалярные произведения:
б) Находим скалярные произведения:
в) Находим скалярные произведения:
г) Находим скалярные произведения:
\langle p,q\rangle= 1\!\cdot\!0+(-2)\!\cdot\!1+1\!\cdot\!2=0;
\langle q,q\rangle= 0\!\cdot\!0+1\!\cdot\!1+2\!\cdot\!2=5.[/math]
д) Находим скалярные произведения:
\langle p,q\rangle= 0\!\cdot\!3+1\!\cdot\!4+4\!\cdot\!5=24;
\langle q,q\rangle= 3\!\cdot\!3+4\!\cdot\!4+5\!\cdot\!5=50.[/math]
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Евклидово пространство
Одной из важнейших задач геометрии является задача измерения расстояния между двумя объектами. В произвольном линейном пространстве мы пока не можем определить насколько «близки» между собой объекты. В настоящем разделе понятие расстояния между двумя векторами — элементами линейного пространства — будет вводиться посредством скалярного произведения векторов. Насколько обоснован такой порядок введения понятий:
$ \mbox<> \qquad $ скалярное произведение $ \to $ длина ?
Ведь в аналитической геометрии последовательность кажется более «естественной»: скалярное произведение двух векторов $ X_<> $ и $ Y_<> $ определялось как произведение длин этих векторов на косинус угла между ними: $ \langle X,Y \rangle = |X| \cdot |Y| \cdot \cos (\widehat
Определения
Вещественное линейное пространство $ \mathbb E_<> $ называется евклидовым 1) , если в этом пространстве определена функция, ставящая в соответствие паре векторов $ \
1. $ \langle X,Y \rangle= \langle Y,X \rangle $ для $ \ < X,\, Y\>\subset \mathbb E $;
2. $ \langle X_1+X_2,Y \rangle = \langle X_1,Y \rangle + \langle X_2,Y \rangle $ для $ \ < X_1,\, X_2,\, Y \>\subset \mathbb E $;
3. $ \langle \lambda\, X,Y\rangle=\lambda\, \langle X,Y\rangle $ для $ \< X,Y\>\subset \mathbb E,\ \lambda \in \mathbb R $;
4. $ \langle X,X \rangle>0 $ для $ \forall X\ne \mathbb O $, $ \langle \mathbb O,\mathbb O \rangle =0 $.
Из аксиом 1 и 2 вытекает свойство линейности скалярного произведения и по второму вектору:
2′. $ \langle X,Y_1+Y_2 \rangle = \langle X,Y_1 \rangle + \langle X,Y_2 \rangle $ для $ \
Пример 1. Пространство $ \mathbb R_<>^
$$ X=\left[\begin
Однако стандартное определение скалярного произведения вовсе не является единственно допустимым; формально скалярное произведение можно ввести и другим способом. Рассмотрим (пока произвольную) вещественную квадратную матрицу $ A_<> $ порядка $ n_<> $ и положим $$ \begin
Зачем нужна такая возможность в неоднозначности определения скалярного произведения в одном и том же пространстве? — Ответ на этот вопрос откладывается до следующего пункта. А пока приведу одно замечание 3) .
Пример 2. Пространство $ \mathbb P_
$$ p(x)=a_<0>x^n+a_1x^
В том же пространстве $ \mathbb P_
$$ \langle p(x),q(x) \rangle = \sum_
Пример 3. Линейное пространство $ \mathbb R^
Вторая интерпретация формулы связана с операцией $ \operatorname
На основании аксиом скалярного произведения, его вычисление для произвольных векторов $ X_<> $ и $ Y_<> $ может быть сведено к вычислению скалярных произведений векторов произвольного базиса. В самом деле, если система $ \
Матрицей Грама системы векторов 4) $ \
С помощью матрицы Грама формула скалярного произведения записывается в виде $$ \langle X,Y \rangle =[x_1,\dots,x_n] G(X_1,\dots,X_n) \left[ \begin
Пример 4. В пространстве $ \mathbb R^
$$ \langle X,Y \rangle = \sum_
Свойства
Теорема. Имеет место неравенство Коши–Буняковского:
$$ \langle X,Y \rangle ^2 \le \langle X,X \rangle \langle Y,Y \rangle \quad npu \ \forall \ \
Доказательство для случая $ \mathbb R^
С помощью скалярного произведения, введенного в предыдущем пункте, можно доказать справедливость интегральной формы неравенства:
$$ \left( \int_a^b p(t)q(t) d\,t \right)^2 \le \int_a^b p^2(t) d\,t \cdot \int_a^b q^2(t) d\,t $$ для произвольных полиномов 6) $ \
Длиною вектора $ X_<> $ в евклидовом пространстве $ \mathbb E_<> $ называется число $$ |X| = \sqrt <\langle X,X \rangle>\ ; $$ здесь квадратный корень понимается как корень арифметический: $ |X| \ge 0 $. Расстоянием между векторами $ X_<> $ и $ Y_<> $ называется число $ |X-Y| $.
В $ \mathbb R^
$$ \langle X,Y \rangle = \sum_
С помощью введенного определения неравенство Коши-Буняковского можно переписать в виде $$ |\langle X,Y \rangle| \le |X| \cdot |Y| \quad npu \ \forall \
Теорема. Имеет место неравенство треугольника
$$ |X+Y| \le |X|+|Y| \quad npu \ \forall \
Доказательство. На основании неравенства Коши-Буняковского, имеем: $$ 0 \le \langle X+Y,\, X+Y \rangle=\langle X,X \rangle+2\langle X,Y \rangle+\langle Y,Y \rangle \le |X|^2+2\, |X| \cdot |Y| +|Y|^2=\left(|X|+|Y| \right)^2 \ . $$ ♦
Углом между векторами $ X_<> $ и $ Y_<> $ называется угол $$\varphi = \widehat
Введенное таким определением понятие является естественным обобщением понятия угла на плоскости и в трехмерном пространстве. Хотя в пространствах размерностей больших $ 3_<> $ человеческие мозги думать не приучены, тем не менее, абстракция находит практическое применение в задаче информационного поиска.
Пусть задача заключается в сравнении двух текстовых документов «на похожесть». Имеются некоторые наборы ключевых слов, описывающих каждый из этих документов. Составим объединение этих наборов, упорядочим получившийся набор (пронумеруем слова), посчитаем частоты вхождений каждого из слов в каждый из документов. Получим два вектора: $$ X_1=(f_<11>,f_<12>,\dots), \ X_2=(f_<21>,f_<22>,\dots) \ , $$ описывающие каждый из документов. Здесь $ f_
Теорема [Пифагор]. Если $ X \bot Y $, то $ |X+Y|^2=|X|^2+|Y|^2 $.
Если векторы $ X_1,\dots,X_k $ попарно взаимно ортогональны, то
Пример. Найти расстояние между полиномами
$$p(x)=x^<100>-1/2\,x^<85>-1/2\,x^<64>+5\,x^<34>-5\,x^<32>+5\,x^2+1 \quad u \quad q(x)=5\,x^2+1 $$ если скалярное произведение задается формулой а) $ \displaystyle \langle p(x), q(x) \rangle = \sum_
Решение. Для случая а) нам достаточно просто вычислить сумму квадратов коэффициентов разности $ p(x)-q(x) $: расстояние равно $ \sqrt <103/2>$.
Для случая б) нам придется иметь дело с интегралом $$ \int_<-1>^1 \left(p(t)-q(t) \right)^2 d\, t = \int_<-1>^1 \left(t^<100>-1/2\,t^<85>-1/2\,t^<64>+5\,t^<34>-5\,t^ <32>\right)^2 d\, t \ , $$ который, несмотря на свой громоздкий вид, может быть вычислен элементарными приемами математического анализа. В этом случае расстояние будет равно $ \sqrt <95965413818\,\big/ 16503052280715>$.
Ответ. а) $ \approx 7.176 $ ; б) $ \approx 0.076 $.
Теперь прокомментируем последний пример. В разделе, посвященном полиному одной переменной, имеется теорема о непрерывной зависимости корней полинома от его коэффициентов. Смысл этого результата в следующем: если коэффициенты полиномов
$$f(x)=x^n+a_1x^
Другое дело, если ставится задача приближения полинома $ p_<>(x) $ только на интервале $ [-1,1] $ — тогда полином $ q_<>(x) $ может оказаться вполне полезным. Выясним сначала природу интеграла, возникшего при решении. Пусть сначала $ p_<>(x) $ и $ q_<>(x) $ — произвольные, но (для простоты рассуждений) неотрицательные на интервале $ [a_<>,b] $ полиномы. Геометрический смысл интеграла $ \int_a^b p(t) d\, t $ — площадь криволинейной трапеции на плоскости $ (x_<>,y) $, ограниченной прямыми $ x=a_<>,\,x=b,\,y=0 $ и графиком $ y=p(x) $. Следовательно, геометрический смысл интеграла $$ \int_a^b \left| p(t)-q(t) \right| d\, t $$ — площадь фигуры, ограниченной прямыми $ x=a,\,x=b_<> $ и графиками $ y=p(x), y=q(x) $  (заштрихована коричневым на рисунке). Чем меньше эта площадь, тем «теснее» друг к другу на отрезке $ [a_<>,b] $ расположены графики $ y=p(x) $ и $ y=q(x) $. Величина $$ \sqrt <\int_a^b \left( p(t)-q(t) \right)^2 d\, t>\ , $$ вообще говоря, не совпадает с предыдущей, но смысл ее тот же: она позволяет оценивать близость графиков на всем отрезке $ [a_<>,b] $. Ответ в примере для варианта б) позволяет заключить, что на отрезке $ [-1,1] $ полином $ p_<>(x) $ неплохо приближается своими младшими одночленами, т.е. на указанном отрезке график $ y=p(x) $ не должен слишком сильно отличаться от параболы $ y=5\,x^2+1 $.
(заштрихована коричневым на рисунке). Чем меньше эта площадь, тем «теснее» друг к другу на отрезке $ [a_<>,b] $ расположены графики $ y=p(x) $ и $ y=q(x) $. Величина $$ \sqrt <\int_a^b \left( p(t)-q(t) \right)^2 d\, t>\ , $$ вообще говоря, не совпадает с предыдущей, но смысл ее тот же: она позволяет оценивать близость графиков на всем отрезке $ [a_<>,b] $. Ответ в примере для варианта б) позволяет заключить, что на отрезке $ [-1,1] $ полином $ p_<>(x) $ неплохо приближается своими младшими одночленами, т.е. на указанном отрезке график $ y=p(x) $ не должен слишком сильно отличаться от параболы $ y=5\,x^2+1 $.
Подводя итог приведенным рассуждениям, можно только повторить: метод, выбираемый для оценки близости между объектами, может зависеть от поставленной задачи. Микроскоп не пригоден для наблюдения за большими объектами, а телескоп — за малыми.
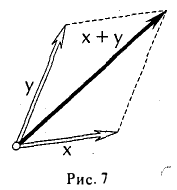
Следующий результат также имеет название, взятое из планиметрии, где он формулируется так: сумма квадратов длин диагоналей параллелограмма равна сумме квадратов длин его сторон.
Теорема. В евклидовом пространстве имеет место равенство параллелограмма
$$ |X+Y|^2+|X-Y|^2 =2(|X|^2+|Y|^2) \quad npu \ \forall \
Ортогонализация
Пусть $ \dim \mathbb E=n $ и векторы $ \
Ортогональный базис будем обозначать $ <\mathfrak E>_1,\dots, <\mathfrak E>_n $.
Чему равно расстояние между двумя векторами ортонормированного базиса?
В пространстве $ \mathbb R_<>^
Теорема. Если ненулевые векторы $ X_1,\dots, X_
Доказательство. В самом деле, если $$ \lambda_1 X_1 + \dots + \lambda_n X_n = \mathbb O \ , $$ то, домножив это равенство скалярно на $ X_ <1>$, получим $$ \lambda_1 \langle X_1,X_1 \rangle + \dots + \lambda_n \langle X_1,X_n \rangle = 0 \ . $$ Поскольку $ \langle X_1,X_j \rangle=0 $ для $ j\in \ <2,\dots,n\>$, то $ \lambda_1 \langle X_1,X_1 \rangle=0 $, откуда $ \lambda_1=0 $. Аналогично показывается, что и все остальные $ \lambda_j $ равны 0. ♦
Задача. Пусть имеется произвольная система $ \
Алгоритм ортогонализации Грама — Шмидта 10)
В случае $ m_<>=1 $ возьмем $ <\mathfrak E>_1=X_1 $: поскольку вектор $ X_ <1>$ входит в линейно независимую систему , то $ <\mathfrak E>_1 \ne \mathbb O $. Далее, будем искать $ <\mathfrak E>_2 $ в виде $$<\mathfrak E>_2=X_2 + \alpha_ <21><\mathfrak E>_1 $$ при пока неопределенном коэффициенте $ \alpha_ <21>$. Очевидно, что при таком выборе $ <\mathfrak E>_2 $ условие $ <\mathcal L>(X_1,X_2)=<\mathcal L>(<\mathfrak E>_1,<\mathfrak E>_2) $ будет выполнено. Подберем $ \alpha_ <21>$ так, чтобы выполнялось $ <\mathfrak E>_2 \bot <\mathfrak E>_1 $. $$0=\langle <\mathfrak E>_1,<\mathfrak E>_2 \rangle=\langle <\mathfrak E>_1,X_2 \rangle+\alpha_ <21>\langle <\mathfrak E>_1,<\mathfrak E>_1 \rangle \ \Rightarrow \ \alpha_<21>=-\langle <\mathfrak E>_1,X_2 \rangle \big/ \langle <\mathfrak E>_1,<\mathfrak E>_1 \rangle \ . $$ Таким образом, коэффициент $ \alpha_ <21>$, а вместе с ним и вектор $ <\mathfrak E>_2 $ определяются единственным образом. При этом $ <\mathfrak E>_2\ne \mathbb O $, ибо, в противном случае, векторы $ X_2 $ и $ <\mathfrak E>_1=X_1 $ были бы л.з., что противоречит предположению о линейной независимости системы $ \
Процесс продолжается далее аналогично. Допустим, что векторы $ <\mathfrak E>_1,\dots,<\mathfrak E>_
Пример. Ортогонализовать систему векторов
$$ X_1=\left[1,0,0,0,1 \right],\ X_2=\left[1,1,0,1,1 \right],\ X_3=\left[1,1,1,1,1 \right] $$ при стандартном способе задания скалярного произведения в $ \mathbb R^5 $.
Пример. Пусть в пространстве полиномов скалярное произведение задается формулой
$$ \langle p(x),q(x) \rangle=\int_<-1>^ <1>p(t)q(t) d\, t \ .$$ Построить ортогональный базис этого пространства.
Решение. Искомый базис строится ортогонализацией канонического базиса $ 1,x,x^2,\dots, x^n $. В результате получаем систему полиномов: $$1,\ x,\ x^2-\frac<1><3>,\ x^3-\frac<3><5>\, x,\ x^4-\frac<6><7>\, x^2+\frac<3><35>,\dots $$ Полиномы, получающиеся из этих нормированием: $$P_0(x)=1,\ P_1(x)= x,\ P_2(x)=\frac<1><2>(3\,x^2-1),\ P_3(x)= \frac<1><2>( 5\,x^3-3\, x),\ $$ $$ P_4(x)= \frac<1><8>(35\,x^4-30\, x^2+3),\dots $$ $$ P_n(x)=\frac<1> <2^n>\sum_
В ортонормированном базисе пространства $ \mathbb E_<> $ матрица Грама из формулы скалярного произведения $$ \langle X,Y \rangle=(x_1,\dots,x_n) G(X_1,\dots,X_n) \left( \begin
Следующая теорема устанавливает связь между двумя ортонормированными базисами в одном и том же пространстве.
Теорема. Матрица перехода от одного ортонормированного базиса к другому является ортогональной.
В пространстве $ \mathbb R^
Матричный формализм алгоритма Грама-Шмидта: QR-разложение
Рассмотрим пример из предыдущего пункта об ортогонализации системы векторов в $ \mathbb R^5 $; только векторы будем рассматривать столбцами: $$ X_1=\left[\begin
Теперь обдумаем полученный результат. Матрицы, на которые производились домножения матрицы $ A_<> $ имеют довольно специфическую форму: они — либо диагональные, либо же отличаются от единичной матрицы в одном их своих столбцов. Эти матрицы могут быть отнесены к типу матриц элементарных преобразований системы столбцов произвольной матрицы $ A_<> $. Все они являются верхнетреугольными, и их произведение $ R_<> $ относится к тому же типу. Обратная к верхнетреугольной также является верхнетреугольной. В результате, можно получить разложение матрицы $ A_<> $ в произведение $$ A=Q_<5\times 3>R^ <-1>\, , $$ где вторая матрица в произведении является верхнетреугольной, а первая имеет свои столбцы ортонормированными.
Теорема [о QR-разложении]. Для любой вещественной матрицы $ A_
Пример. Для матрицы из предыдущего примера имеем:
$$ \left( \begin
Для квадратной неособенной вещественной матрицы $ A_<> $ матрица $ Q_<> $ в QR-разложении будет ортогональной.
Последний результат имеет уже самостоятельное значение, не относящееся к материалам настоящего раздела. Например, его можно использовать для обращения матрицы $ A_<> $. Дело в том, что ортогональная матрица обращается достаточно просто: $ Q^ <-1>= Q^ <\top>$.
Расстояние от точки до многообразия
Задача. Найти расстояние от заданного вектора $ X_<> $ до заданного множества $ \mathbb S\subset \mathbb E $. 
Такая постановка требует немедленного уточнения: что такое расстояние от вектора до множества? Обратясь за помощью к геометрии, мы можем ввести это понятие, основываясь на понятии расстояния между точками: например, расстояние от точки $ X\in \mathbb R^2 $ до множества $ \mathbb S \subset \mathbb R^2 $ определить как минимальное из возможных расстояний между точками $ X_<> $ и $ Y_<> $, где $ Y\in \mathbb S $. Следующий пример показывает, что наше определение оказывается ущербным.
Пример. Множество
Доказать следующие свойства операции $ \perp $:
а) $ \left(\mathbb E_1^<^<\bot>> \right)^<^<\bot>>=\mathbb E_1 $; б) $ \left(\mathbb E_1 +\mathbb E_2 \right)^<^<\bot>>=\mathbb E_1^<^<\bot>> \cap \mathbb E_2^<^<\bot>> $; в) $ \left(\mathbb E_1 \cap \mathbb E_2 \right)^<^<\bot>>=\mathbb E_1^<^<\bot>>+\mathbb E_2^<^<\bot>> $.
Доказать, что в пространстве квадратных матриц со скалярным произведением, заданным формулой
$$ \langle A,B \rangle = \operatorname
Вычисление расстояния
Теорема $ 2 $ из предыдущего пункта позволяет сформулировать результат, на котором и будет основано решение задачи вычисления расстояния.
Теорема 1. Для любого вектора $ X\in \mathbb E $ существует единственное представление его в виде $$ X=X^<^<\parallel>>+X^<^<\bot>> \quad npu \ X^<^<\parallel>>\in \mathbb E_1, X^<^<\bot>> \in \mathbb E_1^<^<\bot>> . $$
В этом разложении вектор $ X^<^<\parallel>> $ называется ортогональной проекцией вектора $ X_<> $ на $ \mathbb E_1 $, а вектор $ X^<^<\bot>> $ — ортогональной составляющей вектора $ X_<> $ относительно $ \mathbb E_1 $ или же перпендикуляром, опущенным из точки $ X_<> $ на подпространство $ \mathbb E_1 $.
Теорема 2. Длина перпендикуляра, опущенного из точки $ X_<> $ на подпространство $ \mathbb E_1 $ , равна расстоянию от этой точки до подпространства: $$\left|X^<^<\bot>>\right|=\min_
Доказательство. $$ X^<^<\bot>>=\left( X-X^<^<\parallel>> \right) \perp \mathbb E_1 \ \Rightarrow \ X^<^<\bot>> \perp \left( -Y+X^<^<\parallel>> \right) \quad npu \ \forall Y \ \in \mathbb E_1 \ . $$ По теореме Пифагора: $$ \left|X^<^<\bot>> \right|^2+ \left|X^<^<\parallel>> -Y \right|^2 =\left|X^<^<\bot>>+ X^<^<\parallel>> -Y \right|^2 = |X-Y|^2 \ \Rightarrow \ $$ $$ \ \Rightarrow \ \left|X^<^<\bot>> \right|^2\le |X-Y|^2 \ \Rightarrow \ \left|X^<^<\bot>> \right|\le \min_
Итак, задача, поставленная в начале ☞ ПУНКТА, решается вычислением $ \left|X^<^<\bot>> \right| $. Для нахождения последнего числа сначала найдем базис $ \
Матрица Грама обращается в единичную если векторы $ X_1,\dots,X_k $ входят в состав ортонормированного базиса пространства $ \mathbb E_<> $. Следовательно, по крайней мере в этом частном случае, система уравнений будет иметь единственное решение. В одном из последующих ☟ ПУНКТОВ будет установлен и более общий факт: $$ \mathfrak
Пример. Найти расстояние от точки $ X=[1,1,2,2,2] $ до подпространства
$$ \mathbb E_1= \left\< X\in \mathbb R^5 \left| \begin
Решение. Базис $ \mathbb E_1 $ составляет фундаментальная система решений системы линейных уравнений, например: $$X_1=[0,-1,1,0,0],\ X_2=[-1,0,0,1,0],\ X_3=[1,1,0,0,1] \ .$$ Составляем матрицу Грама этой системы векторов и выписываем систему уравнений: $$ \left( \begin
Ответ. $ 1/\sqrt <2>$.
Альтернативный способ вычисления расстояния от точки до линейного многообразия, заданного системой линейных уравнений ☞ ЗДЕСЬ.
Расстояние от точки $ X_<> $ до линейного подпространства, базисными векторами которого являются $ X_1,\dots,X_k $, вычисляется по формуле: $$ d=\sqrt<\frac<<\mathfrak G>(X_1,\dots,X_k, X)><<\mathfrak G>(X_1,\dots,X_k)>> \ . $$
Доказательство ☞ ЗДЕСЬ.
Пример. В пространстве полиномов с вещественными коэффициентами степеней не выше $ 5_<> $ со скалярным произведением, заданным формулой
$$\langle p(x),q(x) \rangle = \int_<-1>^1 p(t)q(t) d\,t $$ найти расстояние от полинома $ p(x)= -x^5+x^3-3\,x+1 $ до линейного подпространства четных полиномов.
Решение. Базис подпространства четных полиномов состоит, например, из $ 1,x^2,x^4 $. Имеем: $$ <\mathfrak G>(1,x^2,x^4)=\left| \begin
Подводя итог: определители Грама полностью решают задачу о вычислении расстояния от точки до линейного подпространства в любом евклидовом пространстве; этот результат легко обобщается на произвольное линейное многообразие.
Теорема 3. Расстояние от точки $ X_<> $ до линейного многообразия $ \mathbb M=X_0+\mathbb E_1 $ равно длине ортогональной составляющей вектора $ X-X_0 $ относительно подпространства $ \mathbb E_1 $.
Доказательство. Геометрический смысл понятен из рисунков, иллюстрирующих решение проблемы в $ \mathbb R^ <3>$: надо свести задачу к случаю из предыдущей теоремы с помощью сдвига всей конструкции на вектор $ (-X_0) $.
Формальности: $$ \min_
Расстояние от точки $ X_<> $ до линейного многообразия, заданного параметрически
Вычисление расстояния между линейными многообразиями (и некоторыми другими объектами, заданными алгебраическими уравнениями) ☞ ЗДЕСЬ.
Угол между вектором и линейным многообразием
Углом между вектором $ X\in \mathbb E $ и линейным подпространством $ \mathbb E_1 \subset \mathbb E $ назовем число — точную нижнюю грань множества углов между $ X_<> $ и всевозможными векторами $ Y \in \mathbb E_1 $. Углом между вектором $ X\in \mathbb E $ и линейным многообразием $ \mathbb M=X_0+\mathbb E_1 $ называется угол между $ X_<> $ и $ \mathbb E_1 $.
Теорема. Угол между вектором $ X\in \mathbb E $ и линейным подпространством $ \mathbb E_1 \subset \mathbb E $ равен углу между этим вектором и его ортогональной проекцией $ X^<^<\parallel>> $ на $ \mathbb E_1 $.
Эта теорема сводит задачу к решенной в предыдущих пунктах задаче вычисления расстояния от вектора до подпространства, только теперь интерес смещается от ортогональной составляющей вектора к его ортогональной проекции.
Пример. Определить угол между вектором $ X_0=[1,0,3,0] $ и линейной оболочкой
Решение. Воспользуемся результатом, приведенным ☞ ЗДЕСЬ (для правильной стыковки рассматриваем все векторы как столбцы): $$ X_<\ast>=L(L^ <\top>L_<>)^ <-1>L^ <\top>X_0 \, . $$ Здесь $$ L=\left(\begin
Свойства матрицы Грама
Теорема. $ <\mathfrak G>(X_<1>,\dots,X_m)=0 $ тогда и только тогда, когда система векторов $ \
Доказательство. Если система векторов $ \
Обратно, если определитель Грама равен нулю, то предыдущая система имеет нетривиальное решение относительно $ \alpha_<1>,\dots,\alpha_m $. Пусть $ \alpha_1=\alpha_1^<\star>,\dots,\alpha_m=\alpha_m^ <\star>$ — какое-то из этих решений. Составим вектор $$X^<\star>= \alpha_1^ <\star>X_1+\alpha_2^ <\star>X_2+\dots+\alpha_
Ранг матрицы Грама совпадает с рангом системы порождающих ее векторов:
Если какой-то главный минор матрицы Грама обращается в нуль, то и все главные миноры бóльших порядков обращаются в нуль.
Теорема. $ <\mathfrak G>(X_<1>,\dots,X_m) \ge 0 $ для любого набора векторов $ \
Доказательство ☞ ЗДЕСЬ
Матрица Грама линейно независимой системы векторов является положительно определенной. Матрица Грама произвольной системы векторов является положительно полуопределенной.
Дальнейшие свойства матрицы и определителя Грама ☞ ЗДЕСЬ
Задачи
Источник
Материалы этого раздела составлены на основе книги
Шилов Г.Е. Математический анализ. Конечномерные линейные пространства. М.Наука.1969
Линейные и евклидовы пространства с примерами решения и образцами выполнения
Евклидово пространство — это вещественное линейное пространство, в котором зафиксирована симметричная положительно определенная билинейная форма. Значение билинейной формы на паре элементов называется скалярным произведением этих векторов.

Линейные и евклидовы пространства
Определение линейного пространства
Определение:
Множество V элементов х, у, z,… называется линейным пространством (действительным или комплексным), если по некоторому правилу
I. любым двум элементам х и у из V поставлен в соответствие элемент из V, обозначаемый х + у и называемый суммой элементов х и у;
II. любому элементу х из V и каждому числу а (вещественному или комплексному) поставлен в соответствие элемент из V, обозначаемый ах и называемый произведением элемента х на число а, и эти правила сложения и умножения на число удовлетворяют следующим аксиомам:
- (х + у) + z = х + (у + z) (ассоциативность);
- х + у = у + х (коммутативность)-,
- во множестве V существует элемент θ такой, что для любого элемента х из V выполняется равенство х + θ = х;
- для любого элемента х из V во множестве V существует элемент (-х) такой, что х + (-х) = θ;
- а(х + у) = ах + ау;
- (а + β)х = ах + βх;
- а( β х) = (а β )х;
- 1х = х.
Элемент θ называется нулевым элементом, а элемент (-х) — противоположным элементу х.
Элементы х, у, z,… линейного пространства часто называют векторами. Поэтому линейное пространство называют также векторным пространством.
Примеры линейных пространств
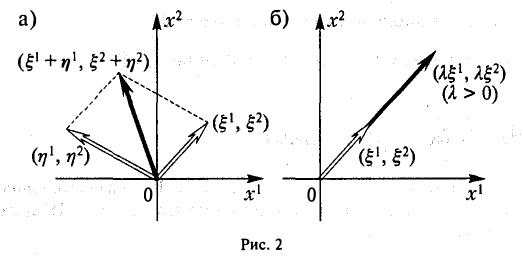
- Совокупность свободных геометрических векторов V3 в пространстве с введенными операциями сложения векторов и умножения вектора на число (рис. 1).
Этим же свойством обладают: совокупность V1 векторов на прямой и совокупность V2 векторов на плоскости.
2, Совокупность упорядоченных наборов ( ) из n действительных чисел.
) из n действительных чисел.
Операции — сложение и умножение на действительное число — вводятся так:

б) умножение на число —

Обозначение: Rn (n -мерное вещественное координатное пространство).
3. Совокупность всевозможных матриц Rmxn размера m х n с введенными правилами сложения матриц,

и умножения матрицы на число,

В частности, совокупность n-строк, R1xn и совокупность столбцов высоты m, Rmx1, являются линейными пространствами.
4. Множество С(-1, 1) вещественных функций, непрерывных на интервале (-1, I), с естественными операциями сложения функций и умножения функции на число.
Во всех приведенных примерах требования 1-8 проверяются непосредственно.
Простейшие свойства линейных пространств
- Нулевой элемент θ определен однозначно.
Пусть θ1 и θ2 — нулевые элементы пространства V. Рассмотрим их сумму θ1 + θ2. Вследствие того, что θ2 — нулевой элемент, из аксиомы 3 получаем, что θ1+ θ2 = θ1, а так как элемент θ1 — также нулевой, то θ1 + θ2 = θ2 + θ1 = θ2 , т. е. θ1 = θ2 .
2. Для любого элемента х противоположный ему элемент (—х) определен однозначно.
Пусть x — и х_ — элементы, противоположные элементу х. Покажем, что они равны.
Рассмотрим сумму х_ + х + x — . Пользуясь аксиомой 1 и тем, что элемент x — противоположен элементу х, получаем:

Аналогично убеждаемся в том, что

Нетрудно убедится также в справедливости следующих свойств:
- Для любого элемента х выполняется равенство 0х = θ.
- Для любого элемента х выполняется равенство —х = (- 1)х.
- Для любого числа а выполняется равенство аθ = θ.
- Из того, что ах = θ, следует, что либо а = 0, либо х = θ.
Линейные подпространства
Непустое подмножество W линейного пространства V называется линейным подпространством пространства V, если для любых элементов х и у из W и любого числа а выполняются следующие условия:

Иногда говорят: «множество W замкнуто относительно указанных операций».
Примеры линейных подпространств
1.Множество векторов на плоскости V2 является линейным подпространством линейного пространства V3.
2. Совокупность решений однородной системы m линейных уравнений с n неизвестными

образует линейное подпространство линейного пространства Rnx1. В самом деле, сумма решений однородной системы () является решением этой же системы и произведение решения системы (*) на число также является ее решением.
3. Совокупность всех вещественнозначных функций, непрерывных на интервале (-1, 1) и обращающихся в нуль при t = 0, образует линейное подпространство линейного пространства С(— 1,1).
Сумма f(t) + g(t) функций f(t) и g(t), обращающихся в нуль при t = 0, t(0) = f(0) = 0, и произведение af(t) функции f(t), обращающейся в нуль при t = 0, f(0) = 0, на число а равны нулю при t = 0.
Свойства линейного подпространства
- Если x1, …, хq — элементы линейного подпространства W, то любая их линейная комбинация
 также лежит в W.
также лежит в W. - Линейное подпространство W само является линейным пространством.
Достаточно убедиться лишь в том, что нулевой элемент 0 и элемент, противоположный произвольному элементу из W, лежат в W. Указанные векторы получаются умножением произвольного элемента х ∈ W на 0 и на -1: θ = 0х, -х = (- 1)х.
Сумма и пересечение линейных подпространств
Пусть V — линейное пространство, W1 w W2 — его линейные подпространства. Суммой W1 + W2 линейных подпространств W1 и W2 называется совокупность всевозможных элементов х пространства V, которые можно представить в следующем виде

где x1 лежит в W1, а х2 — в W2. Коротко это можно записать так:

Сумма линейных подпространств W1 и W2 нaзывается прямой, если для каждого элемента х этой суммы разложение (1) единственно (рис. 3).
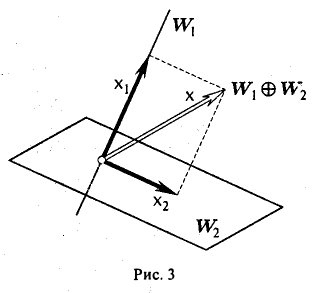
Обозначение: W1⊕W2
Пересечением W1 ∩ W2 линейных подпространств W1 и W2 линейного пространства V называется совокупность элементов, которые принадлежат одновременно и линейному подпространству W1, и линейному подпространству W2.
Свойства пересечения и суммы линейных подпространств
- Сумма W1 + W2 является линейным подпространством пространства V.
Возьмем в W1 + W2 два произвольных элемента х и у. По определению суммы подпространств найдутся элементы х1, у1, из W1 и х2, у2, из W2 такие, что

Это позволяет записать сумму х + у в следующем виде

Так как  то сумма х + у лежит в W1 + W2.
то сумма х + у лежит в W1 + W2.
Аналогично доказывается включение ах ∈ W1 + W2.
2. Пересечение W1 ∩ W2 является линейным подпространством пространства V.
3. Если нулевой элемент является единственным общим вектором подпространств W1 й W2 линейного пространства V, то их сумма является прямой — W1 ⊕ W2.
Линейная оболочка
Линейной оболочкой L(X) подмножества X линейного пространства V называется совокупность всевозможных линейных комбинаций элементов из X,

Последнее читается так: «линейная оболочка L(X) состоит из всевозможных элементов у, представимых в виде линейных комбинаций элементов множества X».
Основные свойства линейной оболочки
- Линейная оболочка L(X) содержит само множество X.
- L(X) — линейное подпространство пространства V.
Сумма линейных комбинаций элементов множества X и произведение линейной комбинации элементов на любое число снова являются линейными комбинациями элементов множества X.
3. L(X) — наименьшее линейное подпространство, содержащее множество X.
Это свойство следует понимать так: если линейное подпространство W содержит множество X , то W содержит и его линейную оболочку L(X).
Пусть W — линейное подпространство, содержащее заданное множество X. Тогда произвольная линейная комбинация  элементов множества X — элемент линейной оболочки L(X) — содержится и в подпространстве W.
элементов множества X — элемент линейной оболочки L(X) — содержится и в подпространстве W.
Пример:
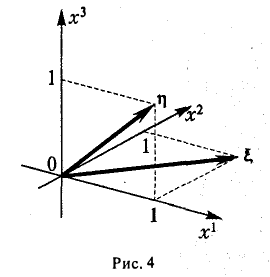
Рассмотрим в линейном пространстве R3 две тройки ξ = (1,1,0) и η = (1,0, I) (рис.4). Множество решений уравнения

является линейной оболочкой L(ξ , η) троек ξ и η.
Действительно, тройки (I, 1, 0) и (1, 0, I) образуют фундаментальную систему решений однородного уравнения (2), и значит, любое решение этого уравнения является их линейной комбинацией.
Пример:
Рассмотрим в линейном пространстве С(- ∞, ∞) вещественнозначных функций, непрерывных на всей числовой оси, набор X одночленов 1, х,…, хn:

Линейная оболочка L(X) представляет собой совокупность многочленов с вещественными коэффициентами, степени которых не превосходят n.
Обозначение: 
Линейная зависимость
Определение. Система элементов х1 . .. , хq линейного пространства V называется линейно зависимой, если найдутся числа a1,… , аq, не все равные нулю и такие, что
(1)

Если равенство (1) выполняется только при а1 = … = аq = 0, то система элементов x1,…, хq называется линейно независимой.
Справедливы следующие утверждения.
Теорема:
Система элементов x1,…, хq (q ≥ 2) линейно зависима в том и только в том случае, если хотя бы один из ее элементов можно представить в виде линейной комбинации остальных.
Предположим сначала, что система элементов x1,…, xq линейно зависима. Будем Считать для определенности, что в равенстве (1) отличен от нуля коэффициент аq. Перенося все слагаемые, кроме последнего, в правую часть, после деления на аq ≠ 0 получим, что элемент хq является линейной комбинацией элементов х1 …, хq:

Обратно, если один из элементов равен линейной комбинации остальных,

то, перенося его в левую часть, получим линейную комбинацию

в которой есть отличные от нуля коэффициенты (-1 ≠ 0). Значит, система элементов x1,…., хq линейно зависима.
Теорема:
Пусть система элементов х1,…,хq линейно независима и y=. Тогда коэффициенты a1 ,… ,аq определяются по элементу у единственным образом.
Пусть


Из линейной независимости элементов x1…, xq вытекает, что a1 — β1 = … = аq — βq = 0 и, значит, 
Теорема:
Система элементов, содержащая линейно зависимую подсистему, линейно зависима.
Пусть первые q элементов системы х1 … , хq, xq+1… , xm линейно зависимы. Тогда найдется линейная комбинация этих элементов такая, что

и не все коэффициенты а1 … ,аq равны нулю. Добавляя элементы xq+1… , xm с нулевыми множителями, получаем, что и в линейной комбинации

равны нулю не все коэффициенты.
Пример. Векторы из V2 линейно зависимы тогда и только тогда, когда они компланарны (рис.5).
Базис. Размерность
Упорядоченная система элементов e1,…, еn линейного пространства V называется базисом этого линейного пространства, если элементы e1,…, еn линейно независимы и каждый элемент из V можно представить в виде их линейной комбинации. Упорядоченность означает здесь, что каждому элементу приписан определенный (порядковый) номер. Из одной системы п элементов можно построить n! упорядоченных систем.
Пример:
Пусть a, b, с — тройка некомпланарных векторов из Vз (рис.6). Тогда упорядоченные тройки а, b, с; b, с, а; с, а, b; b, а, с; а, с, b и с, b, а — различные базисы V3.
Пусть с = (e1 … еn) — базис пространства V.
Тогда для любого элемента х из V найдется набор чисел  такой, что
такой, что
В силу теоремы 2 числа — координаты элемента х в базисе с — определены однозначно.
Посмотрим, что происходит с координатами элементов при простейших действиях с ними.


и для любого числа а
Таким образом, при сложении элементов их соответствующие координаты складываются, а при умножении элемента на число все его координаты умножаются на это число.
Координаты элемента часто удобно записывать в виде столбца. Например,

— координатный столбец элемента  в базисе e.
в базисе e.
Разложим произвольную систему элементов x1,…, хq по базису e,
ли рассмотрим координатные столбцы элементов ч1,…, хq в этом базисе:
Теорема:
Система элементов х1,… ,хq линейно зависима тогда и только тогда, когда линейно зависима система их координатных столбцов в каком-нибудь базисе.
причем хотя бы один из коэффициентов λk отличен от нуля. Запишем это подробнее

Отсюда в силу единственности разложения элемента по базису вытекает, что

Таким образом, линейная комбинация координатных столбцов элементов x1,…, xq равна нулевому столбцу (с теми же коэффициентами λ1,…, λg). Это и означает, что система координатных столбцов линейно зависима.
Если же выполняется равенство (2), то, проводя рассуждения в обратном порядке, получаем формулу (1).
Тем самым, обращение в нуль некоторой нетривиальной (хотя бы один из коэффициентов отличен от нуля) линейной комбинации элементов линейного пространства равносильно тому, что нетривиальная линейная комбинация их координатных столбцов (с теми же коэффициентами) равна нулевому столбцу.
Теорема:
Пусть базис с линейного пространства V состоит из п элементов. Тогда всякая система из то элементов, где т > п, линейно зависима.
4 В силу теоремы 3 достаточно рассмотреть случай m = п + 1.
Пусть x1. . ,хп+1 — произвольные элементы пространства V. Разложим каждый элемент по базису e = (е1 …, еп):
и запишем координаты элементов х1 …, xn+1 в виде матрицы, отводя j-й столбец координатам элемента xj, j = 1,…, п + 1. Получим матрицу из п строк и п + 1 столбцов —
Ввиду того, что ранг матрицы К не превосходит числа п ее строк, столбцы матрицы К (их п + 1) линейно зависимы. А так как это координатные столбцы элементов x1…..хп+1, то согласно теореме 4 система элементов x1…..хп+1 также линейно зависима.
Следствие:
Все базисы линейного пространства V состоят из одинакового числа элементов.
Пусть базис e состоит из п элементов, а базис e’ из п‘ элементов. В силу только что доказанной теоремы из линейной независимости системы е’1,…, е’n заключаем, что п’ ≤ п. Меняя базисы e и e’ местами, в силу этой же теоремы получаем, что п ≤ п’.
Тем самым, п = п’.
Размерностью линейного пространства V называется число элементов базиса этого пространства.
Пример:
Базис координатного пространства R» образуют элементы

Система элементов e1,e2, …,еп линейно независима: из равенства


и значит, a1 = … = an = 0.
Кроме того, любой элемент  из R» можно записать в виде линейной комбинации элементов e1…..еп: ‘
из R» можно записать в виде линейной комбинации элементов e1…..еп: ‘

Тем самым, размерность пространства R» равна п.
Пример:
Однородная линейная система
имеющая ненулевые решения, обладает фундаментальной системой решений (ФСР). ФСР является базисом линейного пространства решений однородной системы. Размерность этого линейного пространства равна числу элементов ФСР, т.е. п — r, где r — ранг матрицы коэффициентов однородной системы, an — число неизвестных.
Пример:
Размерность линейного пространства Мп многочленов степени не выше п равна п + I.
Так как всякий многочлен P(t) степени не выше п имеет вид

то достаточно показать линейную независимость элементов


где t произвольно. Полагая t = 0, получаем, что ао = 0.
Продифференцируем равенство (3) по t:

Вновь положив t = 0, получим, что a1 = 0.
Продолжая этот процесс, последовательно убеждаемся в том, что a0 = a1 = … = ап = 0. Это означает, что система элементов e1 = I,… ,en+1 = t» линейно независима. Следовательно, искомая размерность равна n + 1.
Линейное пространство, размерность которого равна п, называется п-мерным.
Обозначение: dim V = п.
Соглашение. Далее в этой главе всюду считается, если не оговорено противное, что размерность линейного пространства V равна п.
Ясно, что если W — подпространство n-мерного линейного пространства V, то dim W ≤ п.
Покажем, что в п-мерном линейном пространстве V есть линейные подпространства любой размерности k ≤ п.
Пусть e = (е1 … еn) — базис пространства V. Легко убедиться в том, что линейная оболочка
имеет размерность k.
По определению dim < θ >= 0.
Теорема:
О пополнении базиса. Пусть система элементов а1.. , аk линейного пространства V размерности п линейно независима и к 
так как в нетривиальной линейной комбинации

коэффициент μ ≠ 0 вследствие линейной независимости системы а1…., аk.
Если бы разложение вида (4) можно было бы написать для любого элемента b пространства V, то исходная система a1…, аk была бы базисом согласно определению. Но в силу условия k 
строками которой являются координаты векторов а1, а2, а3, а4, равен четырем. Это означает, что строки матрицы А, а, значит, и векторы а1, а2, а3, а4 линейно независимы.
Подобный подход используется и в общем случае: чтобы дополнить систему k линейно независимых элементов

до базиса пространства R» , матрица
элементарными преобразованиями строк приводится к трапециевидной форме, а затем дополняется п — k строками вида
(0 … 1 … 0)
так, чтобы ранг получаемой матрицы был равен п. Справедливо следующее утверждение.
Теорема:
Пусть W1 и W2 — линейные подпространства линейного пространства V. Тогда

Замена базиса
Пусть e = (e1 … еn) и e’ = (е’1, … е’n) — базисы линейного пространства V. Разложим элементы базиса e’ по базису с. Имеем

Эти соотношения удобно записать в матричной форме
(2)

называется матрицей перехода от базиса e к базису e’.
Свойства матрицы перехода
- det S ≠ 0.
Доказательство этого свойства проводится от противного.
Из равенства detS = 0 вытекает линейная зависимость столбцов матрицы S. Эти столбцы являются координатными столбцами элементов е’1,…, е’n в базисе e. Поэтому (и вследствие теоремы 4) элементы е’1…..с’n должны быть линейно зависимыми.
Последнее противоречит тому, что e’ — базис. Значит, допущение, что det S = 0, неверно.
2. Если и  — координаты элемента х в базисах e и e’ соответственно, то:
— координаты элемента х в базисах e и e’ соответственно, то:
(3)
Заменяя в формуле
e’j их выражениями (1), получаем, что

Отсюда в силу единственности разложения элемента по базису имеем
Переходя к матричной записи найденных равенств, убеждаемся в справедливости свойства 2.
3. S -1 — матрица перехода от базиса e’ к базису e.
Свойство 3 доказывается умножением обеих частей матричного равенства (2) на матрицу S -1 справа.
Евклидовы пространства
Вещественное линейное пространство V называется (вещественным) евклидовым пространством, если любым двум элементам х и у из V ставится в соответствие число, обозначаемое через (х,у), такое, что для любых элементов х, y,z и произвольного вещественного числа а выполняются следующие условия:
4. (х, х) ≥ 0; причем равенство нулю возможно в том и только в том случае, если х = θ.
Число (х, у) называется скалярным произведением элементов х и у. Примеры евклидовых пространств.
- В пространстве свободных векторов К] скалярное произведение векторов а и b определяется так:

2. Скалярное произведение произвольных элементов  из координатного пространства R» можно определить формулой
из координатного пространства R» можно определить формулой
3, Линейное подпространство евклидова пространства само является евклидовым пространством.
Пользуясь определением евклидова пространства, нетрудно доказать следующие свойства:
Теорема:
Неравенство Коши—Буняковского. Для любых двух элементов х и у евклидова пространства V справедливо неравенство

Если (х, х) = θ , то х = θ и неравенство выполняется вследствие того, что ( θ , у) = 0.
Обратимся к случаю (х, х) ≠ 0. Тогда (х, х) > 0. По определению скалярного произведения неравенство

справедливо для любых элементов х и у из пространства V и любого вещественного числа t. Запишем неравенство (1) подробнее:

Левую часть последнего неравенства можно рассматривать как квадратный трехчлен относительно t. Из того, что знак этого квадратного трехчлена не изменяется при любых t, заключаем, что его дискриминант неположителен,

Перенося вычитаемое в правую часть, получаем требуемое неравенство.
Замечание:
Часто доказанное неравенство записывают в равносильной форме,

Следует подчеркнуть, что слева в этом неравенстве стоит абсолютная величина (модуль) скалярного произведения, а в правой части — нормы векторов х и у.
Определение:
Длиной (нормой) элемента х называется число |х|, вычисляемое по правилу
Ясно, что |х| ≥ 0 для любого х, причем равенство |х| = 0 возможно лишь в случае, если х = θ.
Рассмотрим цепочку равенств:

Заменяя второе слагаемое на 2|(х, у)| ≥ 2(х, у) и применяя неравенство Коши—Буняковского |(х,у)| ≤ |х| • |у|, получаем, что

После извлечения квадратного корня приходим к неравенству треугольника:
|х + у| ≤ |х| + |у|
(рис.7).
Углом между ненулевыми элементами х и у евклидова пространства называется число φ, подчиненное следующим двум условиям:

Определение угла корректно, так как согласно теореме 8 имеем
для любых ненулевых элементов х и у.
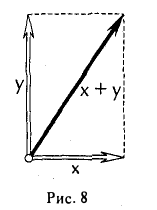
Элементы х и у называются ортогональными, если (х, у) = 0. Для ортогональных элементов из соотношения (2) вытекает равенство

являющееся обобщением известной теоремы Пифагора’, квадрат длины суммы ортогональных элементов равен сумме квадратов их длин (рис. 8).
Система элементов f1…..f k называется ортогональной, если (fi, fj) =0′ при i ≠ j, и ортонормированной, если

Определение:
называют символом Кронекера.
Теорема:
Ортонормированная система элементов линейно независима.
Умножая обе части равенства

скалярно на элемент fj, j = 1 ,… ,k, получаем, что
И так как (fj, fj) = 1,то aj = 0, j = 1,…, k.
Метод ортогонализации
Покажем, как, пользуясь заданной системой линейно независимых элементов f1,… ,fk евклидова пространства Е, построить в нем ортонормированную систему из к элементов.
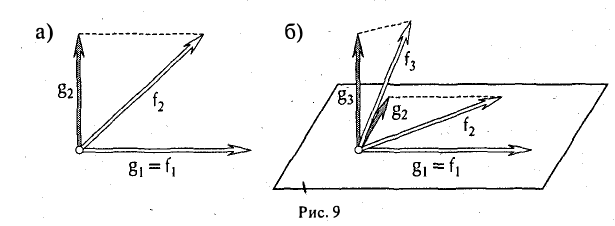
Для того, чтобы элемент
был ортогонален элементу g1, необходимо выполнение следующего равенства:

Тем самым, элемент
ортогонален элементу g1 (рис. 9 а).
Пользуясь построенными элементами g1, g2 и заданным элементом fз, построим элемент

ортогональный как элементу g1, так и элементу g2. Для этого коэффициенты β1 и β2 должны удовлетворять следующим условиям:

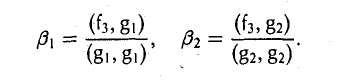
Таким образом, элемент
, (f3,g|) (f3,g2)
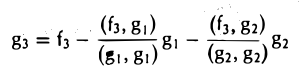
ортогонален элементам g1 и g2 (рис. 9 6).
Аналогичными рассуждениями можно показать, что элемент

ортогонален элементам 
Делением каждого элемента gi (i = 1…..k) на его длину |g 
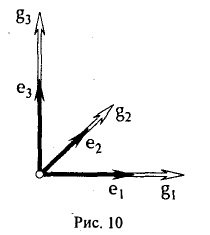
Базис e = (e1 … еn) евклидова пространства называется ортонормированным, или ортобазисом, если

Суммируя вышеизложенное, получаем следующий результат.
Теорема:
В любом евклидовом пространстве существует о ртонормированный базис.
Пример:
Методом ортогонализации построить ортоиормированный базис евклидова пространства Е по его базису

Полагаем b1 = a1 и b2 = а2 — ab1. Для того, чтобы вектор

был ортогонален вектору b1, необходимо выполнение неравенства


Для того, чтобы вектор

был ортогонален векторам b1 и b2, необходимо выполнение равенств


Тем самым, вектор

Система векторов b1, b2, b3 ортогональна. Поделив каждый вектор на его длину, получим

— ортонормированный базис пространства Е.
При помощи ортонормированного базиса скалярное произведение элементов вычисляется особенно просто. Пусть e = (e1 … еn) — ортонормированный базис пространства Е. Вычислим скалярное произведение элементов х и у, предварительно разложив их по базису e

Ортогональное дополнение
Пусть W — линейное подпространство евклидова пространства V. Совокупность W⊥ элементов у пространства V, обладающих свойством
(y. х) = 0,
где х — произвольный элемент из W, называется ортогональным дополнением подпространства W. Другими словами, ортогональное дополнение W⊥ состоит из всех элементов у, ортогональных всем элементам подпространства W.
Свойства ортогонального дополнения
- W⊥ — линейное подпространство пространства V. Пусть элементы y1, у2 лежат в W⊥ , т. е.

для любого элемента х из W. Складывая эти равенства и пользуясь свойствами скалярного произведения, получаем,что
для любого элемента х из W. Это означает, что
Из того, что (у, х) = 0 для любого элемента х из W, вытекает равенство (ау, х) = а(у, х) и, значит, включение ay ∈ W⊥ .
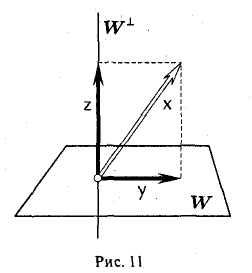
Свойство 2 означает, что любой элемент х пространства V можно представить, причем единственным образом, в виде суммы элементов из W и W⊥ :
x = y+z. ‘ (*)
Элемент у ∈ W называется ортогональной проекцией элемента х на линейное подпространство W, а элемент z ∈ W⊥ — его ортогональной составляющей (рис. 11).
Покажем, как по заданным элементу х и линейному подпространству W найти его ортогональную проекцию у и ортогональную составляющую г.
Можно считать, что в линейном подпространстве W задан ортонормированный базис e1…..еk. Запишем искомый элемент у в виде линейной комбинации

Подставляя это выражение в формулу (*):

и умножая обе части полученного равенства последовательно на элементы e1,…, еk, в предположении z ⊥ W приходим к соотношениям


обладают требуемыми свойствами. *
Пример:
Найти ортогональную проекцию вектора х = (4, 2, 3, 5) на линейное подпространство W ⊂ R4, заданное системой уравнений
Векторы a1 = (1,0,0,-1) и а2 = (0,1,-1,0) образуют фундаментальную систему решений и, следовательно, базис подпространства W. Кроме того, векторы a1 и а2 ортогональны. Для того, чтобы построить ортонормированный базис подпространства W, достаточно разделить эти векторы на иx длины. В результате получим


является ортогональной проекцией вектора х = (4,2, 3, 5), на подпространство W, а вектор

— его ортогональной составляющей.
Унитарные пространства
Унитарным пространством называется линейное комплексное пространство U, в котором каждой упорядоченной паре элементов х и у из U ставится в соответствие число — скалярное произведение (х, у) так, что для любых элементов х, у и z из U и любого комплексного числа а выполняются следующие соотношения:
- (у, х) = (х, у) (черта в правой части указывает на операцию комплексного сопряжения);
- (x + y,z) = (x,z) + (y,z);
- (ах, у) = а(х, у);
- (х, х) ≥ 0, причем равенство (х, х) = 0 возможно лишь в случае, если х = θ.
Пример:
В координатном пространстве Сn, элементами которого являются всевозможные упорядоченные наборы п комплексных чисел, скалярное произведение можно ввести так

Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://vmath.ru/vf5/euclid_space
http://lfirmal.com/lineynye-i-evklidovy-prostranstva/