Определяемые переменные системы уравнений математического описания
Определяемые переменные системы уравнений математического описания
Тема:«Векторно-матричные модели систем управления в непрерывном времени»
Понятие пространства состояний
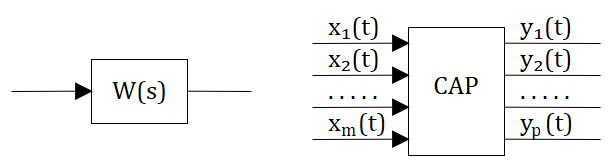
Современная теория автоматического управления оперирует с векторно-матричными моделями динамических систем. При этом рассматриваются в общем случае многомерные системы, т.е. системы произвольного порядка со многими входами и многими выходами, в связи, с чем широко используются векторно-матричные уравнения и аппарат векторной алгебры. Для получения векторно-матричной модели (ВММ) исследуемая динамическая система представляется в виде “черного ящика” с некоторым числом входных и выходных каналов (рис. 1.1, а).
Рис.1.1. Скалярное (а) и векторное (б) представления динамической системы в виде «черного ящика»
Все переменные, характеризующие систему, можно разделить на три группы.
1. Входные переменные или входные воздействия, генерируемые системами, внешними по отношению к исследуемой системе. Они характеризуются вектором входа.
r — число входов
2. Выходные переменные, характеризующие реакцию системы на указанные входные воздействия. Представляются вектором выхода
m — число выходов.
3. Промежуточные переменные, характеризующие внутреннее состояние системы, — переменные состояния, представляются вектором
n — число переменных состояния.
Таким образом, совокупность входов можно рассматривать как один обобщенный вход, на который воздействует вектор входа u, совокупность выходов как вектор y, а совокупность промежуточных координат, характеризующих состояние системы, — в виде вектора состояния x (см. рис. 1.1, б).
Состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно.
Собственно система, ее входы и выходы — это три взаимосвязанных объекта, которые в каждой конкретной ситуации определяются соответственно математической моделью системы, заданием множеств входных и выходных переменных.
Решение задач анализа и синтеза связано с исследованием состояний системы, множество которых образует пространство состояний,.
Векторно-матричные модели в непрерывном времени
В общем случае динамическая система в непрерывном может быть описана парой матричных уравнений:
где F — n-мерная вектор-функция системы; Q — m-мерная вектор-функция выхода.
Матричное уравнение (1.1) называют уравнением состояния системы. Его решение, удовлетворяющее начальному условию , дает вектор состояния системы
Матричное уравнение (1.2), определяющее выходные переменные в зависимости от x(t) и u(t), называют уравнением выхода.
В частном случае зависимости могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:
Переход к стационарным моделям позволяет оперировать с коэффициентными матрицами, т.е. со стационарными уравнениями
А — функциональная матрица размером n x n, называемая матрицей состояния системы (объекта);
В — функциональная матрица размером n x r, называемая матрицей управления (входа);
С — функциональная матрица размером m x n, называемая матрицей выхода по состоянию;
D — функциональная матрица размером m x r, называемая матрицей выхода по управлению.
Очень часто D=0, т.е. выход непосредственно не зависит от входа.
В дальнейшем под векторно-матричной моделью объекта (системы) будем понимать описание ее динамического поведения в классе стационарных непрерывных линейных систем, представленное в виде уравнений (1.6), (1.7).
Таким образом, ВММ имеет единую форму представления, что значительно облегчает алгоритмизацию и компьютерную реализацию проектных процедур и проектных операций структурно-параметрического синтеза и анализа систем управления. Однако с использованием ВММ может быть получено лишь приближенное проектное решение, которое потребует дальнейшего уточнения, так как такие модели отображают динамическое поведение реального объекта лишь в классе стационарных линейных систем.
Построение ВММ реального объекта сопряжено с проблемами линеаризации исходного математического описания и приведения его к структурированному виду — форме Коши.
Если мы знаем физическое описание системы и можем записать уравнения, описывающие поведения ее отдельных частей, то получить уравнения состояния системы обычно сравнительно не трудно. Покажем эту процедуру на нескольких примерах.
Пример 1.1. Получим уравнения состояния для простейшей RLC-цепи, показанной на рис 1.2.
Динамическое поведение этой системы при полностью определяется, если известны начальные значения и входное напряжение U(t) при . Следовательно, можно выбрать в качестве переменных состояния, то есть
Для указанных переменных состояния можно записать дифференциальные уравнения
или в векторно-матричной форме
Таким образом для рассматриваемой системы матрицы А, В, С векторно-матричной модели будут иметь следующий вид:
Пример 1.2. На рис. 1.3. показан электродвигатель постоянного тока независимого возбуждения, работающий при постоянном магнитном потоке (Ф=const).
Дифференциальные уравнения для такого объекта могут быть записаны относительно следующих переменных состояния: — скорости вращения ротора, тока якоря i(t), углового перемещения ротора . При использовании знакомых зависимостей для электродвижущей силы и вращающего момента двигателя получим уравнение электрической цепи
и уравнения вращающейся части
где J – приведенный момент инерции электродвигателя.
Представляя векторы состояния, входа и выхода как получим следующую векторно-матричную модель электродвигателя постоянного тока
То есть для рассматриваемой системы матрицы А, В, С векторно-матричной модели будут иметь следующий вид:
Пример1.3. Построим векторно-матричную модель электромеханического объекта — электропривода постоянного тока, приводящего в движение через механический редуктор тяжелую платформу. Функциональная схема такого объекта приведена на рис. 1.4.
Здесь легко выделить три функциональных элемента, соответствующие трем видам преобразования энергии:
двигатель, выполняющий преобразование электрической энергии в механическую, — электромеханический преобразователь;
механизм, осуществляющий передачу механической энергии от вала двигателя через редуктор к рабочему органу — платформе.
При использовании общеизвестных допущений [5] и обозначений координат и параметров такого объекта его динамическое поведение при МС=0 описывается следующей системой линейных дифференциальных уравнений:
Если компонентами вектора состояния выбрать , где Uп – напряжение преобразователя, iя — ток электродвигателя, — скорость вращения электродвигателя, МУ — момент упругости механизма, — скорость вращения механизма, то элементы векторно-матричной модели
принимают следующий вид:
После подстановки реальных значений параметров объекта, которые приведены в табл. 1.1, компоненты матриц состояния А и управления В принимают вид (1.13).
На рис. 1.5. приведено окно редактирования векторно-матричной модели (1.13) в среде Компьютерного комплекса функционального проектирования динамических систем.
Контрольные вопросы к лекции № 1.
1. Какие переменные при построении математического описания системы принято называть
a) входными переменными;
b) выходными переменными;
c) переменными состояния?
2. Математическое описание объекта с одним входом и одним выходом представлено структурной схемой, содержащей q элементов, представленных передаточной функцией общего вида
Как в этом случае можно определить размерность пространства состояния для описания этого объекта?
3. Математическое описание объекта с двумя входами и одним выходом y(t) представлено следующим уравнением в операторной форме
Какова в этом случае будет размерность пространства состояния n для описания этого объекта?
4. Выберите из приведенных ниже записей возможные формы представления уравнения состояния для непрерывных систем.
5. Объект управления имеет r – входов, m — выходов, его математическое описание в непрерывном времени содержит n дифференциальных уравнений первого порядка. Какова в этом случае будет размерность матрицы состояния?
6. Сформируйте векторно-матричную модель фильтра, электрическая схема которого представлена на рис. 1.6.
Здесь следует учесть, что
объект имеет один вход — U1 один выход — iH; все параметры электрической схемы R1, R2, L, C1, C2, RH известны и являются постоянными;
могут быть использованы следующие обозначения
7.При составлении математического описания динамических процессов в упругом электромеханическом объекте, влючающем в себя электродвигатель постоянного тока независимого возбуждения (Ф=const) и механизм, модель которого представляется двухмассовой системой (см. пример 1.3), могут быть использованы следующие переменные:
iя — ток электродвигателя,
— скорость вращения электродвигателя,
Му – упругий момент механизма,
— скорость вращения механизма,
— угол поворота ротора электродвигателя,
l – линейное перемещение механизма.
Какие из этих переменных, и в какой последовательности включены в состав вектора состояния приведенной ниже векторно-матричной модели?
ОТВЕТЫ
a) переменные, характеризующие реакцию системы на входные воздействия;
b) переменные, генерируемые системами, внешними по отношению к исследуемой системе;
c) промежуточные переменные, характеризующие внутреннее состояние системы.
2. Математическое описание систем автоматического управления ч. 2.9 — 2.13
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В предыдущих сериях:
В это части будут рассмотрены:
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена). 2.10. Весовая и переходная функции звена (системы). 2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции. 2.12. Mетод переменных состояния. 2.13. Переход от описания переменных «вход-выход» к переменным состояния.
Попробуем применить, полученные знания на практике, создавая и сравнивая расчетные модели в разных видах. Будет интересно познавательно и жестко.
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена)
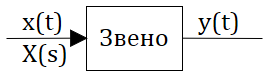
Рассмотрим динамическое звено САР изображенное на рисунке 2.9.1
Подставим полученные выражения в уравнение динамики и получим уравнение динамики в изображениях:
B(s) — слагаемое, которое определяется начальными условиями, при нулевых начальных условиях B(s)=0. W(s) — передаточная функция.
Передаточной функцией САР (звена) называется отношение изображений выходного сигнала к входному воздействию при нулевых н.у.
После того, как в явном виде найдено изображение для неизвестной выходной величины, нахождение оригинала не представляет сложностей. Либо по формуле Хэвисайда, либо разложением на элементарные дроби, либо по таблице из справочника.
Пример
Построить выходной сигнал звена САР при единичном входном воздействии и нулевых начальных условиях, если уравнение динамики звена имеет следующий вид:
Подставим в уравнение динамики и получим уравнение динамики в изображениях:
Для получения выходного сигнала из уравнения в изображениях выполним обратное преобразования Лапласа:
2.10. Весовая и переходная функции звена (системы).
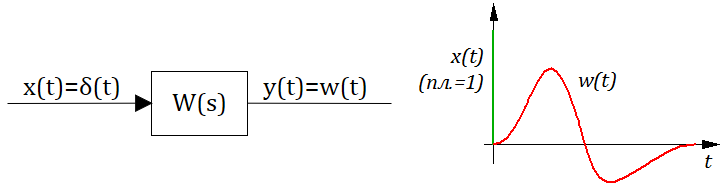
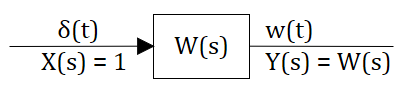
Определение:Весовой функцией звена (системы) называется реакция системы при нулевых н.у. на единичное импульсное воздействие.
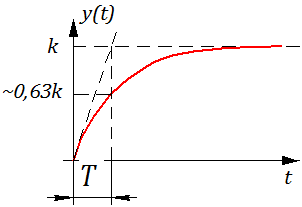
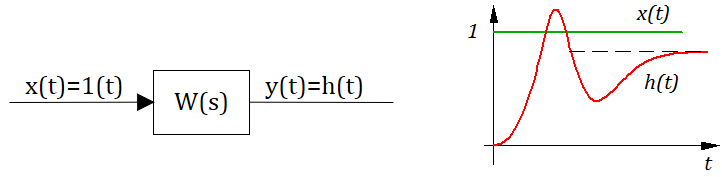
Определение:Переходной функцией звена (системы) при н.у. называется реакция на единичное ступенчатое воздействие.
На этом месте можно вспомнить, что преобразование Лапласа это интеграл от 0 до бесконечности по времени (см. предыдущий текст), а импульсное воздействие при таком интегрировании превращается в 1 тогда в изображениях получаем что:
Передаточная функция играет роль изображения реакции звена или системы на единичное импульсное воздействие.
Для единичного ступенчатого воздействия преобразование Лапласа тоже известно (см. предыдущий текст):
тогда в изображениях получаем, что реакция системы на ступенчатое воздействие, рассчитывается так:
Реакция системы на единичное ступенчатое воздействие рассчитывается обратным преобразованием Лапласа:
2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции. Формула Дюамеля-Карсона
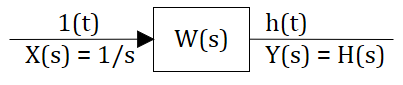
Предположим, что на вход системы поступает произвольное воздействие x(t), заранее известное. Найти реакцию системы y(t), если известны входное воздействие x(t) и весовая функция w(t).
Представим, что входное воздействие представляет собой последовательность прямоугольных импульсов до времени t и ступеньки высотой x(t) в момент времени t. см.рис. 2.11 Для каждого импульса мы можем записать реакцию системы через весовую функциию:
где: — значение отклика по завершению предыущего импульса; — время завершения текущего импульса; — значение весовой функции в начале текущего импульса.
Тогда для определения занчения отклика в произвольный момент времени необходимо сложить все импульсы и ступенчатое воздействие в момент времени t:
Переходя к пределам
если перейти от t к бесконечности мы получим формулу интеграла Дюамеля-Карсона, или по другому «интеграла свертки» который обеспечивает вычисление оригинала функции по произвдению изображения двух функций:
где — вспомогательное время
Для вывода аналогичной зависмости от переходной функции вспомним что изображение весовой и переходной функции связаны соотношением: запишем выражение изображения для отклика в операторной форме:
Используя интеграл свертки получаем, что при известной переходной функции (h(t)) и известному входному воздействию х(t) выходное воздействие рассчитывается как:
2.12. Mетод переменных состояния.
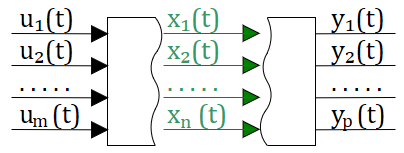
До этого мы рассматривали системы с одной передаточной функцией, но жизнь всегда сложнее и как правило в системах есть несколько передаточных функций несколько входных воздейстий и несколько реакций системы. (см. рис. 2.12.1)
В этом случае наиболее удобной формой пердставления систем для их анализа и расчета оказался метод переменных состояния. Для этого метода, вместо передаточных функций связывающих вход с выходом используются дополнительные переменные состояния, которые описывают систему. В этом случае можно говорить, что состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно. см. рис. 2.12.2
В методе состояний, производные всех переменных состояния, в общем случае зависит от всех переменных и всех входных воздействия, и могут быть записаны в представленной ниже системы обыкновенных дифференциальных уравнений (ОДУ) первой степени. Эта система уравнений называю системой ОДУ в форме Коши:
Выход из системы зависит от переменных состояния и, в общем случае от входных воздействий и описывается следующей системой уравнений:
где: n — количество перемнных состояния, m — количество входных воздействий, p — количество выходных переменных;
Данная система уравнений может быть записана в матричной форме:
где: — вектор входа (или вектор управления); — вектор столбец производных переменных состояния; — вектор столбец переменных состояния; — вектор выхода; — собственная матрица системы [n x n], — постоянные коэффициенты; — матрица входа [n x m], — постоянные коэффициенты; — матрица выхода а [p x n], — постоянные коэффициенты; — матрица обхода [p x m], — постоянные коэффициенты;
В нашем случае почти всегда все элементы матрицы D будут нулевыми: D = 0.
Такое описание системы позволяет с одной стороны стандартным образом описывать различные технические системы. Явная формула для расчета производных позволяет достаточно просто осуществлять численное интегрирование по времени. И это используется в различных программах моделирования
Другое использование данного представления для простых систем, описанных в переменных «вход-выход», зачастую позволяет устранить технические трудности, связанные с решением ОДУ высокой степени.
Еще одним преимуществом данного описания, является то, что уравнения в форме Коши можно получить из законов физики
Пример решения задачи в форме коши.
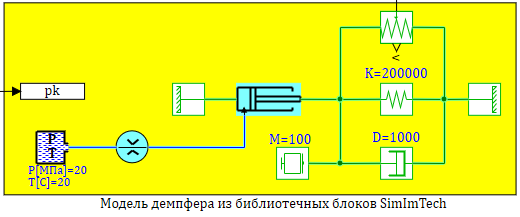
Рассмотрим задачу моделирования гидравлического привода, при следующих условиях:
Дано: Цилиндрический плунжер диаметром 10 мм, с приведенной массой 100 кг, работает на пружину жесткостью 200 Н/мм и демпфер с коэффициентом вязкого трения — 1000 Н/(м/с). Полость начальным объемом 20 см 3 соединяется с источником давлния дросселем диаметром диаметр которого 0,2 мм. Коэффициент расхода дросселя 0.62. Плотность рабочей жидкости ρ = 850 кг/м 3 . Определить: Перемещение дросселя, если в источнике давление происходит скачек 200 бар. см. рис. 2.12.13
Уравенение движение плунжера:
Где: – площадь плунжера, – жесткость пружины, – коэффициент вязкого трения, p – давление в камере.
Поскольку дифференциальное движения это уравнение второго порядка, превратим его в систему из двух уравнений первого порядка, добавив новую переменную — скорость , тогда
Уравнение давления в камере, для упрощения принимаем что изменениям объема камеры из-за перемещения плунжера можно пренебречь:
Где: Q – расход в камеру, V — объем камеры.
Расход через дроссель:
Где: f– площадь дросселя, – давление в источнике, p – давление в камере. Уравнение дросселя не линейное, по условию задачи, давление входное изменяется скачком, от 0 до 200 бар, проведем линеаризацию в окрестности точки давления 100 бар тогда:
Подставляем линеаризованную формул расхода в формулу давления:
Таким образом общая система уравнений в форме Коши, для рис 2.12.3 привода принимает вид:
Матрицы A, B, С, В для матричной формы системы уравнений принимают вид:
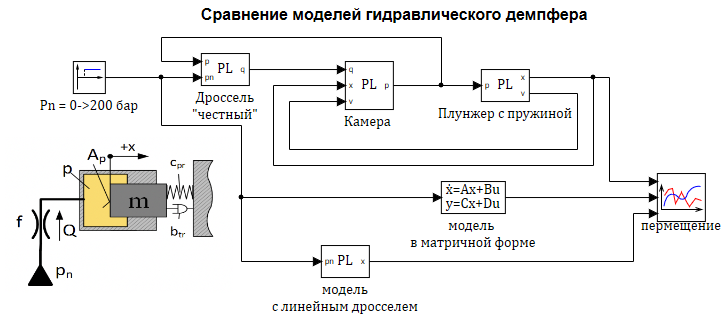
Проверим моделированием в SimInTech составленную модель. На рисунке 2.12.13 представлена расчетная схема содержащая три модели: 1 — «Честная» модель со всеми уравнениями без упрощений. 2 — Модель в блоке «Переменные состояние» (в матричной форме). 3 — Модель в динамическом блоке с линеаризованным дросселем.
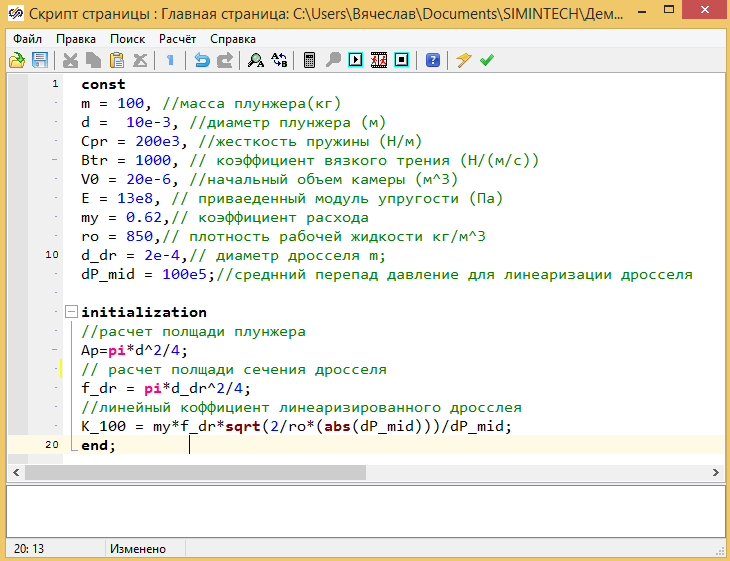
Все условия задачи задаются как глобальные константы проекта, в главном скрипте проекта, там же расчитываются на этапе инициализации расчета, площади плунжера и проходного сечения дросселя см. рис. 2.12.5:
Рисунок 2.12.5 Глобальный скрипт проекта.
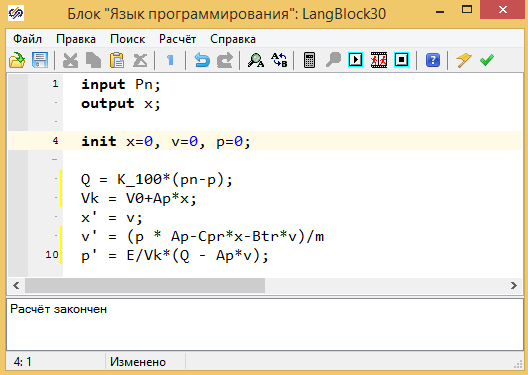
Модель на внутреннем языке программирования представлена на рис. 2.12.6. В данной модели используется описание модели в форме Коши. Так же выполняется учет изменения объема дросселя на каждом шаге расчета, за счет перемещения плунжера (Vk = V0+Ap*x.)
Рисунок 2.12.6 Скрипт расчета модели в форме Коши.
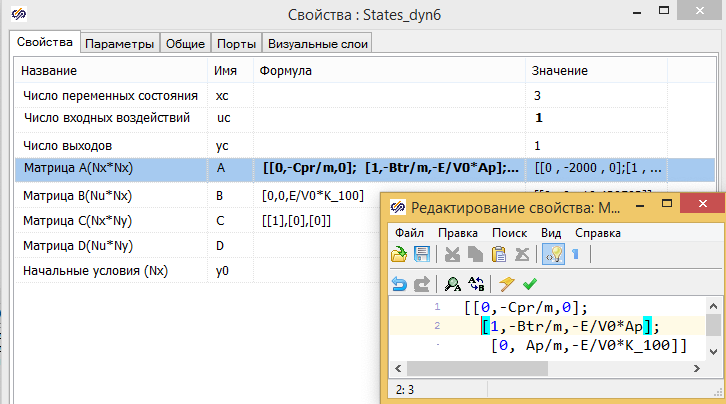
Модель в матричном форме задается с использованием глобальных констант в виде формул. (Матрица в SimInTech задается в виде последовательности из ее столбцов) см. рис. 2.12.7
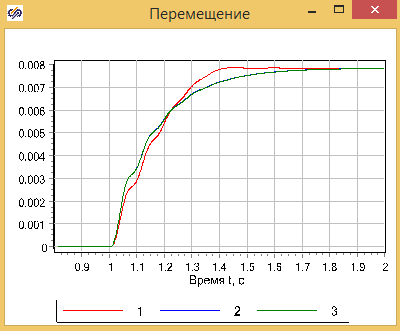
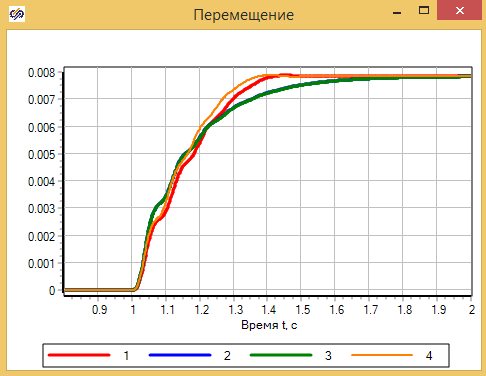
Результаты расчета показывают, что модель в матричной форме и модель на скриптовом языке в форме Коши, практически полностью совпадают, это означает, что учет изменения объема полости практически не влияют на результаты. Кривые 2 и З совпадают. Процедура линеаризация расхода через дроссель вызывает заметное отличие в результатах. 1-й график c «честной» моделью дросселя, отличается от графиков 2 и 3. (см. рис. 2.12.8)
Сравним полученные модели, с моделью созданной из библиотечных блоков SimInTech, в которых учитываются так же изменение свойств реальной рабочей жидкости — масла АМГ-10. Сама модель представлена на рис. 2.12.9, набор графиков на рисунке 2.12.10
На графиках видно, что уточненная модель отличается от предыдущих, однако погрешность модели составлят наших упрощенных моделей составляют примерно 10%, в лишь в некоторые моменты времени.
2.13. Переход от описания переменных «вход-выход» к переменным состояния и обратно
Рассмотрим несколько вариантов перехода от описания «вход-выход», к переменным состояния:
Вариант прехода зависит от правой части уравнения с переменными «вход-выход»:
2.13.1. Правая часть содержит только b0*u(t)
В этом варианте, в уравнениях в правой части отсутствуют члены с производными входной величины u(t). Пример с плунжером выше так же относится к этому варианту.
Что бы продемонстрировать технологию перехода рассмотрим следующее уровнение:
Для перехода к форме Коши ведем новые переменные:
И перепишем уравнение относительно y»'(t):
Используя эти переменные можно перейти от дифференциального уравнения 3-го прядка, к системе из 3-х уравнений первого порядка в форме Коши:
Соотвественно матрицы для матричного вида уравнений в переменных сосотяния:
2.13.2. Правая часть общего вида
Более сложный случай, когда в уравнениях есть производные от входных воздействий и уравнение в общем случае выглядит так:
Сделаем преобразования: перейдем к уравнениям динамики в изображениях:
Тогда можно представить уравнение в изображениях в виде:
Разделим уравнение в изображениях на произведение полиномов , получим:
Где: — некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины . Тогда входная величина может быть в изображениях представлена как:
Вренемся к оригиналу от изображений получим: , где: — дифференциальный оператор.
А это дифференциальное уравнение n-го порядка мы можем преобразовать к системе из n дифференциальных уравнений первого порядка, как это мы делали выше:
Таким образом, мы получили систему уравнение в форе Коши, относительно переменных состояния :
А регулируемую величину (выход системы) мы так же можем выразить через эти переменные, в изображениях:
Перейдем от изображения к оригиналам:
Если обозначить вектор , то мы получим уравнения переменных состояниях в матричной форме, где D = 0:
Пример:
Рисунок 2.13.1 Передаточная функция.
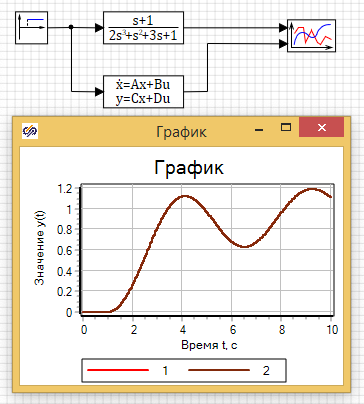
Имеется передаточная функция (рис. 2.13.1) в изображениях :
Необходимо преобразовать передаточную функцию к системе уравнений в форме Коши
В изображения реакция системы связана с входным воздействие соотношением:
Разделим в последнем правую и левую часть на произведения , и введем новую перменную :
Полиномы N(s) и L(s) равны:
Перейдем в последнем выражении от изображения к оригиналам и ведем новые переменные (состояния):
Переходим от уравнения третьего порядка к системе трех уравнений первого порядка:
Или в матричной форме:
Для получения второго матричного уравнения воспользуемся соотношением для новых переменных в отображениях:
Перейдем от изображений к оригиналу:
Таким образом второе уравнение матричной системы выглядит так:
Проверим в SimInTech сравнив передаточную функцию и блок переменных состояния, и убедимся, что графики совпадают см. рис. 2.13.2
Рисунок 2.13.2 Сравнение переходного процеса у блока передаточной функции и блока переменных состояния.
Переменные в математических моделях
Переменные величины, входящие в математическую модель, различают по нескольким признакам.
По роли, которую переменные играют по отношению к объекту моделирования. На рис. 1.4 X = (x1, x2,…, xn) – вектор входных переменных, Y = (y1, y2,…, ym) – вектор выходных переменных. В связи с разделением переменных на входные и выходные рассматриваются прямые и обратные задачи исследования объекта по его математической модели. В прямых задачах по данным о выходах объекта иссле-дуется его поведение в различных условиях (режимах работы), т. е. входные переменные, структура и параметры модели относятся к исходным данным, а выходные переменные представляют результат исследования: Y =f(X) или F(X, Y) = 0, где известны характеристики X и f или F.
Рис. 1.4. Переменные в объекте и его модели
В обратных задачах считаются известными X и Y (доступны для измерения и исследования), а определению подлежат неизвестные структура и параметры модели (f или F). Такие задачи называют задачами идентификации.
Входные переменные разделяют на управляемые (управляющие воздействия) и неуправляемые (возмущения) Первые позволяют выполнять регулирование режима работы объекта, а вторые меняются самопроизвольно, например погодные условия.
По подверженности воздействию случайным факторам. Детерминированная (определенная) переменная означает, что для нее исключено влияние случайных факторов – она задается вполне определенным значением или меняется во времени по определенному закону. Некоторые переменные по своей природе или по влиянию на них случайных факторов являются случайными величинами. Процесс изменения такой величины во времени называется случайным или стохастическим процессом. К этим переменным можно отнести мощность нагрузки тяговой подстанции, которая зависит от загрузки контактной транспортной сети, или величину активного сопротивления провода ЛЭП, в большой степени подверженного влиянию температуры окружающей среды.
В основе описания случайных переменных лежат методы теории вероятностей, случайных процессов и математической статистики.
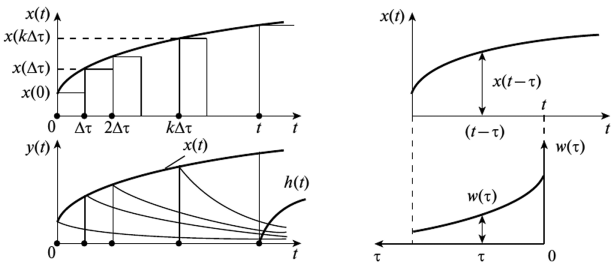
По свойствам непрерывности и дискретности. Изменения непрерывных переменных во времени описываются непрерывными функциями, которые могут принимать континуальное множество значений в некоторых практически всегда имеющихся пределах (рис. 1.5, а). Непрерывность, порожденная инерционностью материальных систем, является их неотъемлемым свойством. Однако на практике возможности разрешения близких значений функций и ее аргументов всегда ограничены; для каждого конкретного случая можно указать определенную область, в пределах которой эти значения становятся неразличимыми для наблюдателей или инструментальных средств. Очевидно, что такую область достаточно характеризовать единственным значением, что приводит к понятию дискретных переменных (рис. 1.5, б, в, г).
Дискретные переменные подразделяются на три типа:
1) дискретные относительно значений переменной (рис. 1.5, б);
2) дискретные относительно времени (рис. 1.5, в);
3) дискретные относительно значений переменной и относительно времени (рис. 1.5, г).
Множество дискретных значений, которые принимает переменная, как правило, является конечным: положение выключателя (включено, выключено), количество включенных генераторов на электростанции (0, 1, 2, … ), значения целых чисел, представленных в цифровой вычислительной машине (например, от –32 768 до +32 767). С помощью дискретных переменных относительно значений удобно представлять некоторые процессы (графики нагрузок или напряжений по часам суток или месяцам года), распределение вероятностей (гистограмма) и т. п.
Дискретность во времени связана с отсчетом или замером переменных в отдельные дискретные моменты времени. Так, в автоматизированных системах управления измерения переменных выполняются с заданной периодичностью, например, через каждые 5 минут.
г
в
б
а
Рис. 1.5. Виды переменных по свойствам непрерывности и дискретности
Дискретность по времени и по значению дополнительно к измерениям в отдельные моменты времени предполагает использование дискретных значений переменных.
По способу получения переменные подразделяются на наблюдаемые и ненаблюдаемые.
Главное свойство наблюдаемых переменных – доступность для наблюдения. Однако наблюдаемость сама по себе еще не обеспечивает возможности полного исследования и описания переменной. Необходимо, чтобы последняя обладала еще свойством измеримости, т. е. возможностью построения для исследуемой величины метрики. Этому требованию удовлетворяют непосредственно измеряемые переменные. Они представляют собой количественные характеристики свойств и параметров всевозможных материальных объектов и процессов (напряжение, ток, скорость, линейные размеры и пр.), которые определяются на основе прямого измерения, т. е. сравнения с мерой, обеспечены средствами измерения и охвачены существующей системой метрологического обеспечения.
Тесно связан с непосредственно измеряемыми и следующий класс переменных – косвенно измеряемые.
Косвенно измеряемая переменная x сама по себе не является объектом измерения, а часто и в принципе не может быть непосредственно измерена. Вместо нее непосредственному измерению подвергаются другие, вспомогательные переменные (α, β, γ,…), которые связаны с исследуемой переменной функциональной зависимостью x = f(α, β, γ,…). Это позволяет вычислить значение искомой переменной по результатам прямых наблюдений вспомогательных величин, например, вычислить объем тела по результатам измерения его линейных размеров. При испытаниях силовых трансформаторов в электрических сетях температуру его обмоток определяют методом измерения их сопротивлений постоянному току, т. е. температура – косвенно измеряемая переменная.
К косвенно измеряемым переменным относят такие искусственно сконструированные идеальные образования, которые вообще не наблюдаемы: математическое ожидание, дисперсия, энтропия и др.
Существует класс переменных, которые при их количественном оценивании не имеют материальной эталонной базы и находятся вне сферы метрологии. К ним относятся все виды непосредственно или косвенно измеряемых переменных, приведенных к безразмерной форме и выраженных в относительных единицах. Например, некоторые величины материальной природы (интенсивность сейсмических явлений, интенсивность облачности в метеорологии, твердость материалов по Бринеллю и некоторые другие), а также искусственные идеальные конструкции, характеризующие в количественном отношении сложные и массовые объекты и явления (рентабельность, прибыль, эффективность и др.). Такие переменные называют условно измеряемыми, так как меры или единицы измерения, используемые при их количественном оценивании, носят конвенционный характер.
Существует еще один класс наблюдаемых переменных – условно количественно оцениваемые. Они представляют сложные многофакторные явления, интенсивность которых может быть различной, но для количественного оценивания этой интенсивности не удается ввести ни объективной единицы измерения, ни способа измерения. Однако в целом ряде случаев между интенсивностями рассматриваемого явления удается установить отношение порядка (равны – не равны, больше – меньше и т. д.), а затем отобразить эти отношения, вообще говоря, произвольным образом на некоторое множество (систему) чисел. Результатом такой процедуры являются, например, численные оценки качества усвоения учащимися и студентами учебного материала, степень удовлетворения работой членов некоторого производственного коллектива, степень качества исполнения музыкального произведения или выполнения спортивного упражнения. Условное количественное оценивание основано на опыте и интуиции и по сути своей субъек-тивно.
Ненаблюдаемые переменные подразделяют на принципиально ненаблюдаемые и технически ненаблюдаемые.
Принципиально ненаблюдаемые переменные не существуют как компоненты реального мира и поэтому поддаются определению только косвенными методами, в частности на основе косвенных измерений (статистические характеристики).
Технически ненаблюдаемые переменные характеризуют такие материальные явления, которые либо не обеспечены техническими средствами, необходимыми для измерения и оценивания, либо протекают в условиях, когда инструментальный доступ к ним невозможен. Характерным примером переменной, не наблюдаемой из-за практической недоступности, является количество угля для помола в шаровой мельнице на электростанции.
Каждая переменная, связанная с материальным объектом, может изменять свои значения лишь в некоторых конечных пределах, которые обусловлены физическими свойствами объекта и характером решаемой задачи. Данные об этих пределах – ограничения на переменные – существенны при построении и использовании всех видов моделей, а в оптимизационных задачах, где необходимо найти оптимальное значение так называемой целевой функции, ограничения являются главной частью самой модели.
С математической точки зрения различают ограничения типа простых неравенств: Xmin ≤ X ≤ Xmax, Ymin ≤ Y ≤ Ymax – параллепипедные ограничения и функциональные ограничения, фиксирующие предельные значения некоторой величины в функции от других переменных: fmin(X) ≤ Z ≤ fmax(X) и т. п.
В практике моделирования выделяют так называемые жесткие ограничения, которые являются абсолютными (например, угол поворота лопатки турбины – «до упора»), и ограничения мягкие, допускающие кратковременные нарушения установленной границы значений переменной (например, верхнего предела рабочего напряжения на электродвигателе).
В общем случае данные об ограничениях на переменные входят в состав модели как обязательная составная часть.
1.4. Адекватность и эффективность математических моделей
Математическое описание объекта может иметь различную степень соответствия (адекватность) объекту-оригиналу. Как правило, исследователь стремится к более полному и точному отражению в модели свойств объекта. Это естественное стремление объясняется неопределенностью, которая неизбежно присутствует при построении моделей. Нельзя заранее точно знать, какие свойства объекта важны для решаемой задачи, а какие – несущественны. Такая неопределенность тем больше, чем меньше исследователь знает исследуемый объект и меньше его опыт в решении подобных задач.
Таким образом, требование полноты соответствия модели объекту-оригиналу является одним из ее качеств. Мало того, излишняя полнота модели в большинстве случаев даже вредна, так как приводит к такому усложнению модели, что ее использование становится невозможным. Поэтому другое качество модели – это ее простота.
Нетрудно понять, что качества адекватности и простоты противоречат друг другу, т. е. с улучшением одного из них происходит ухудшение другого. Отыскание оптимального сочетания (как говорят, «золотой середины») этих двух качеств при построении модели есть отдельная задача, решение которой лежит на исследователе. Здесь необходимы опыт, интуиция и соответствующий уровень подготовки исследователя. Идеальная квалификационная подготовка последнего не только весьма обширна, но и в значительной мере противоречива.
С одной стороны, исследователь должен досконально представлять себе задачу и глубоко изучить объект моделирования. Но, с другой стороны, исследователю, строящему модель, необходимо хорошо владеть аппаратом современной математики, представлять себе весь арсенал модельных конструкций, иметь опыт формализации знаний и использования современных вычислительных средств. Кроме того, во многих случаях от исследователя требуются знания в области планировании и проведения эксперимента на объекте-оригинале или на более сложной модели (вычислительный эксперимент).
Модель с оптимальным сочетанием качеств адекватности и простоты можно назвать эффективной (практически полезной) моделью. Математически такое сочетание соответствует максимуму так называемой «функции полезности», и, если эта функция может быть записана, отыскание ее максимума возможно известными оптимизационными методами.
Употребляя термин «точность математического моделирования», можно иметь в виду адекватность модели, например, говорят: точная или приближенная формула, линеаризованная (т. е. приближенно замененная линейной) зависимость и т. д. Но реализация математической модели, т. е. проведение «вычислителем» одного или нескольких расчетов, результатом которых будут численные значения переменной, вектора, таблицы, содержит погрешности вычислений из-за ошибок округления, прерывания итерационного процесса вычислений и ошибок в данных, которые переходят (распространяются) на результаты. Дальнейшая обработка реализаций математической модели предполагает и подсчет погрешности исследований. В связи с этим, рассматривая вопрос об эффективности математических моделей, следует иметь в виду погрешности реализаций, которые иногда являются причиной дополнительных упрощений модели, так как учет некоторых факторов может, например, сказаться на результатах в меньшей степени, чем погрешности в исходных данных.
Рассмотрим математическую модель линии электропередачи (ЛЭП) высокого напряжения. В нее входят такие параметры, как активное сопротивление, индуктивность самоиндукции и взаимоиндукции проводов, а также емкости между проводами и проводами и землей. Высота подвеса проводов и заземленных грозозащитных тросов на линии влияет на величину емкостей между проводами и землей. Следует ли в расчетах режимов ЛЭП учитывать близость земли? В некоторых случаях при достаточно длинных ЛЭП определение емкостных параметров требует уточнения в части влияния земли, а при небольших длинах линий это не обязательно.
При анализе адекватности, эффективности и точности отдельных математических моделей используются некоторые численные оценки. Получение этих оценок почти всегда связано с большими трудностями, так как требует проведения натурных (на объекте-оригинале) или вычислительных (по реализациям по более точной модели) экспериментов. Иногда такие эксперименты требуют больших материальных и временных затрат, но проводить их необходимо, поскольку это единственный способ оценить качество математических моделей.
Истинные значения параметров обычно отождествляются с экспериментально полученными. Однако погрешности натурного эксперимента во многих случаях оказываются соизмеримыми с погрешностями математических моделей, а иногда заметно их превышают.
Пусть на выходе объекта измеряются m переменных Y (рис. 1.4, а). При исследовании на математической модели получились m модельных переменных Yм. Вектор погрешностей есть разница полученных векторов Δ = Y – Yм. В целом погрешность математической модели можно оценить по норме вектора погрешностей Δ:
.
Часто используют евклидову норму и среднеквадратическую погрешность
.
В качестве других характеристик математических моделей иногда называют экономичность (по затратам) и универсальность (применимость к группе объектов).
 r — число входов
r — число входов m — число выходов.
m — число выходов. n — число переменных состояния.
n — число переменных состояния. .
.
 , дает вектор состояния системы
, дает вектор состояния системы
 могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:
могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:

 полностью определяется, если известны начальные значения
полностью определяется, если известны начальные значения  и входное напряжение U(t) при
и входное напряжение U(t) при  можно выбрать в качестве переменных состояния, то есть
можно выбрать в качестве переменных состояния, то есть 

 — скорости вращения ротора, тока якоря i(t), углового перемещения ротора
— скорости вращения ротора, тока якоря i(t), углового перемещения ротора  . При использовании знакомых зависимостей для электродвижущей силы
. При использовании знакомых зависимостей для электродвижущей силы  и вращающего момента двигателя
и вращающего момента двигателя  получим уравнение электрической цепи
получим уравнение электрической цепи
 получим следующую векторно-матричную модель электродвигателя постоянного тока
получим следующую векторно-матричную модель электродвигателя постоянного тока
 , где Uп – напряжение преобразователя, iя — ток электродвигателя,
, где Uп – напряжение преобразователя, iя — ток электродвигателя,  — скорость вращения электродвигателя, МУ — момент упругости механизма,
— скорость вращения электродвигателя, МУ — момент упругости механизма,  — скорость вращения механизма, то элементы векторно-матричной модели
— скорость вращения механизма, то элементы векторно-матричной модели
 для описания этого объекта?
для описания этого объекта? и одним выходом y(t) представлено следующим уравнением в операторной форме
и одним выходом y(t) представлено следующим уравнением в операторной форме

 — угол поворота ротора электродвигателя,
— угол поворота ротора электродвигателя, приведенной ниже векторно-матричной модели?
приведенной ниже векторно-матричной модели?

 — постоянные времени;
— постоянные времени;  — коэффициент усиления.
— коэффициент усиления.






 — единичное ступенчатое воздействие.
— единичное ступенчатое воздействие.



 тогда в изображениях получаем что:
тогда в изображениях получаем что:

 на ступенчатое воздействие, рассчитывается так:
на ступенчатое воздействие, рассчитывается так:


 — значение отклика по завершению предыущего импульса;
— значение отклика по завершению предыущего импульса;  — время завершения текущего импульса;
— время завершения текущего импульса;  — значение весовой функции в начале текущего импульса.
— значение весовой функции в начале текущего импульса.



 — вспомогательное время
— вспомогательное время запишем выражение изображения для отклика в операторной форме:
запишем выражение изображения для отклика в операторной форме:




 — вектор входа (или вектор управления);
— вектор входа (или вектор управления);  — вектор столбец производных переменных состояния;
— вектор столбец производных переменных состояния;  — вектор столбец переменных состояния;
— вектор столбец переменных состояния;  — вектор выхода;
— вектор выхода;  — собственная матрица системы [n x n],
— собственная матрица системы [n x n],  — постоянные коэффициенты;
— постоянные коэффициенты;  — матрица входа [n x m],
— матрица входа [n x m],  — постоянные коэффициенты;
— постоянные коэффициенты;  — матрица выхода а [p x n],
— матрица выхода а [p x n],  — постоянные коэффициенты;
— постоянные коэффициенты;  — матрица обхода [p x m],
— матрица обхода [p x m],  — постоянные коэффициенты;
— постоянные коэффициенты;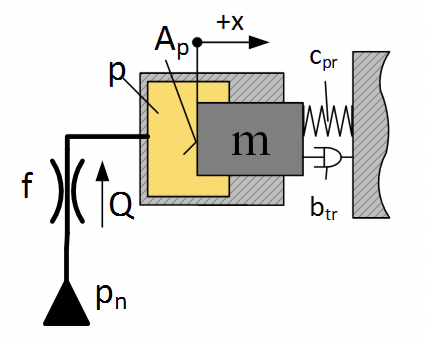

 – площадь плунжера,
– площадь плунжера,  – жесткость пружины,
– жесткость пружины,  – коэффициент вязкого трения, p – давление в камере.
– коэффициент вязкого трения, p – давление в камере. , тогда
, тогда 



 – давление в источнике, p – давление в камере.
– давление в источнике, p – давление в камере. 













 , получим:
, получим:
 — некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что
— некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что  . Тогда входная величина может быть в изображениях представлена как:
. Тогда входная величина может быть в изображениях представлена как:
 ,
,  — дифференциальный оператор.
— дифференциальный оператор.

 :
:


 , то мы получим уравнения переменных состояниях в матричной форме, где D = 0:
, то мы получим уравнения переменных состояниях в матричной форме, где D = 0:


 , и введем новую перменную
, и введем новую перменную  :
:








 .
. .
.