Движение несвободной материальной точки
Основной закон динамики точки справедлив и для случая, когда на движущуюся точку наложены связи. При этом, конечно, могут возникнуть особенности решения первой и второй задач динамики, поскольку реактивные силы заранее неизвестны и их надо определить по заданным связям
Пусть связь представляет собой поверхность какого-либо тела, по которой движется точка. Тогда координаты точки должны удовлетворять уравнению этой поверхности, называемому уравнением связи
Аналогично, если точка вынуждена двигаться по некоторой линии (движение шарика внутри криволинейной трубки), то уравнениями связи являются уравнения этой линии
Таким образом, движение несвободной материальной точки зависит не только от приложенных к точке активных сил и начальных условий, но также от имеющихся связей. При этом значения начальных условий должны удовлетворять уравнениям связей.
Для такой несвободной материальной точки дифференциальные уравнения имеют тот же вид, что и для свободной точки, только к действующим силам надо добавить силы реакций связей.
Связей на двусторонние, или удерживающие, и на односторонние, или неудерживающие, связи.
Связь называется двусторонней, если накладываемые ею на координаты точки ограничения выражаются в форме равенств, определяющих кривые или поверхности в пространстве, на которых должна находиться эта точка.
Двусторонняя, или удерживающая, связь препятствует перемещению точки тела в двух противоположных направлениях.
Ограничения, накладываемые на координаты точки односторонней связью, выражаются неравенствами.
Последовательность решения задачи динамики несвободной точки проследим на примере движения точки по гладкой поверхности.
Пусть гладкая неподвижная поверхность задана уравнением f(x, у, z) = 0 , причем х, у, z — координаты движущейся точки массой m под действием заданной силы F. Обозначим через N

В дифференциальной геометрии доказывается, что направляющие косинусы внешней нормали к поверхности, а следовательно и вектора N, вычисляются по формулам:

Тогда проекции вектора N на координатные оси можно выразить следующим образом:

где обозначено l= N/Df. Подставляя проекции в уравнения движения, получим:
4 Динамика несвободной материальной точки, относительное движение материальной точки
Краткое содержание: Динамика несвободной материальной точки. Относительное движение материальной точки. Частные случаи.
Динамика несвободной материальной точки
Несвободной материальной точкой называется точка, свобода движения которой ограничена.
Тела, ограничивающие свободу движения точки, называются связями.
Пусть связь представляет собой поверхность какого-либо тела, по которой движется точка. Тогда координаты точки должны удовлетворять уравнению этой поверхности, которое называется уравнением связи.

Если точка вынуждена двигаться по некоторой линии, то уравнениями связи являются уравнения этой лини.
Рекомендуемые файлы
 ,
, 
Таким образом, движение несвободной материальной точки зависит не только от приложенных к ней активных сил и начальных условий, но так же от имеющихся связей. При этом значения начальных параметров должны удовлетворять уравнениям связей.
Связи бывают двухсторонние или удерживающие и односторонние или неудерживающие.
Связь называется двухсторонней если, накладываемые ею на координаты точки ограничения выражаются в форме равенств, определяющих кривые или поверхности в пространстве на которых должна находится точка.

Материальная точка подвешена на стержне длины  .
.
Уравнение связи имеет вид:

Связь называется односторонней если, накладываемые ею на координаты точки ограничения выражаются в форме неравенств. Односторонняя связь препятствует перемещению точки лишь в одном направлении и допускает ее перемещение в других направлениях.

Материальная точка подвешена на нити длины .
Уравнение связи имеет вид:

Принцип освобождаемости от связей
Связь можно отбросить заменив действие связи силой реакции связи.
 .
.
В проекциях на оси декартовой системы координат это будет выглядеть так:
 ,
,
 ,
,
 .
.
Относительное движение материальной точки
Во многих задачах динамики движение материальной точки рассматривается относительно системы отсчета, движущейся относительно инерциальной системы отсчета.

Получим дифференциальные уравнения движения материальной точки относительно подвижной системы отсчета.
 — инерциальная система отсчета.
— инерциальная система отсчета.
 — подвижная система отсчета.
— подвижная система отсчета.
,
где  — сумма активных сил,
— сумма активных сил,  — сумма сил реакции связи.
— сумма сил реакции связи.
Согласно теореме Кориолиса 
Перепишем дифференциальное уравнение следующим образом

 — переносная сила инерции,
— переносная сила инерции,
 — кориолисова сила инерции.
— кориолисова сила инерции.
С учетом этих обозначений мы получаем динамическую теорему Кориолиса (уравнения относительного движения).
Материальная точка движется относительно неинерциальной системы отсчета так же как и относительно инерциальной, только к приложенным активным силам и силам реакции связей следует добавить кориолисову и переносную силу инерции.

Силы  и
и  являются поправками на неинерционность системы.
являются поправками на неинерционность системы.
В проекциях на подвижные оси



Частные случаи относительного движения
1. Относительное движение по инерции
Если материальная точка движется относительно подвижной системы отсчета прямолинейно и равномерно, то такое движение называется относительным движением по инерции.
 ,
,  , следовательно
, следовательно

2. Относительное равновесие
При покое материальной точки относительно подвижной системы отсчета ее относительные скорость и ускорение равны нулю, т.е.
 и , следовательно ускорение Кориолиса тоже равно нулю
и , следовательно ускорение Кориолиса тоже равно нулю 
Условие относительного равновесия имеет вид:

3. Инерциальные системы отсчета
Переносное ускорение в общем случае вычисляется по формуле
 ,
,
где  — ускорение точки, принятой за полюс (начало координат);
— ускорение точки, принятой за полюс (начало координат);  — угловая скорость вращения подвижной системы координат вокруг выбранного полюса;
— угловая скорость вращения подвижной системы координат вокруг выбранного полюса;  — угловое ускорение этого вращения (
— угловое ускорение этого вращения ( );
);  — радиус-вектор движения точки относительно полюса.
— радиус-вектор движения точки относительно полюса.
Если подвижная система отсчета движется поступательно, прямолинейно и равномерно, то
Если Вам понравилась эта лекция, то понравится и эта — Крестьянская цивилизация России.
 ,
, 
и уравнения относительного движения имеют вид:
 .
.
Подвижная система отсчета тоже инерциальна.
Лифт движется вверх с ускорением 
Движение несвободной материальной точки


Движение несвободной материальной точки
- Как уже известно, фундаментальные законы динамики несвободных материальных точек и, следовательно, дифференциальные уравнения движения имеют тот же вид, что и в случае свободных точек, и на точки действуют только силы реакции связи. Будет добавлено в. Естественно, что в этом случае сила реакции связи известна заранее, и ее необходимо дополнительно определять по данной связи, наложенной на точку движущегося материала, что позволяет решить первую и вторую основные проблемы динамики.
В некоторых случаях движение точки может вызвать соответствующую особенность. При решении первой основной задачи динамики результирующая сила, действующая на точку, определяется движением точки, заданным из дифференциального уравнения этого движения. Эта результирующая сила затем отделяет силу реакции связывания для конкретной связи. Поэтому проблема разбивки известной силы на ее составляющие. Обычно полная сила реакции движущейся точки разбита на две составляющие.
Эти два явления описываются умножением всех сходств и моментов времени на коэффициент сходства, который исходит из одного значения. Людмила Фирмаль
Объединенная составляющая силы реакции, которая уравновешивает данную силу, приложенную к точке, называется статической силой реакции. Другая составляющая общей силы реакции зависит только от движения точки под действием данной силы и называется динамической силой реакции. Баланс инерции движущейся точки. При решении второй основной проблемы динамики, когда необходимо определить движение свободной точки в соответствии с заданной силой и начальными условиями, некоторые из сил, действующих на эту точку, то есть все реакции связывания Сила заранее не известна и должна определяться данной связью В процессе решения проблемы.
Таким образом, вторую основную проблему динамики несвободных материальных точек можно сформулировать следующим образом: Учитывая силы, начальные условия и ограничения, накладываемые на точку, определяют движение этой точки и силу реакции связи. Рассмотрим решение этой проблемы для движения точек и кривых на поверхности. Дифференциальные уравнения представлены в системе координат, которая лучше всего подходит для конкретной задачи. Анализировать постановки задач и решения в декартовых декартовых системах координат. Движение точки на поверхности Дайте гладкую, неподвижную поверхность, где точка массы m движется под действием заданной силы r с уравнением f (x, y, z) = 0. Где x, y и z — координаты движущейся точки.
Поскольку поверхность мишени гладкая, сила трения отсутствует. Выражая N как неизвестную нормальную силу реакции на поверхности, мы получаем следующее дифференциальное уравнение для движения точки на поверхности: w ^ = Tx + A ‘ bfdx N = 7 Vcos (A?, Av) = -y y bfdy ‘ Nx = Ncos (N ^ z) = ^ — ^. (18) Укажите X = N / bf и подставьте значения Nx, Ny и Nx из (18) в (17) следующим образом: Эти дифференциальные уравнения называются лагранжевыми дифференциальными уравнениями первого порядка для движения несвободных материальных точек.
Эти три дифференциальных уравнения и одно конечное уравнение — поверхностное уравнение f (x, y, z) = 0 — вы можете найти четыре неизвестных — координаты и время точек x, y, z и любой интеграл Неопределенный множитель Лагранжа X как функция постоянной. Любая константа определяется из начальных условий. Из найденного неопределенного множителя Лагранжа X можно легко определить поверхностную силу реакции N = X & /. Как правило, это зависит от времени. = Если поверхность не является гладкой, в дополнение к нормальной силе реакции, будет действовать предельная сила трения Fmai.
Эту проекцию трения следует добавить в правую часть дифференциального уравнения движения точки. Это дополнение усложняет решение проблемы, но проблема принципиально разрешима. Это связано с тем, что с добавлением неизвестной силы добавляется конечное уравнение, которое связывает эту силу с нормальным откликом. Где k — коэффициент трения. Поскольку сила трения скольжения всегда противостоит скорости, проекция этой силы на оси координат может быть выражена как: F max = -Lpax COS (t>, Ax) = -Fraax Как хорошо С учетом сил трения задача интегрирования дифференциальных уравнений движения несвободных материальных точек становится очень сложной.
- Перемещение точек по плавной кривой Кривая с фиксированной линией в пространстве может рассматриваться как пересечение двух поверхностей. j \ (x, y, z) = 0 и f2 (x, y, z) = 0. Эти поверхности создают два нормальных отклика N и N2 на движущуюся точку, поэтому полный отклик кривой линии равен N = N2 + N2. Дифференциальное уравнение Лагранжа для первого типа движения точки вдоль кривой имеет вид каждый Добавление двух конечных уравнений поверхности fi (x, y, z) = 0 и f2 (x, y, z) = 0 к первому виду дифференциального уравнения Лагранжа (19) дает пять величин x, y, z В зависимости от времени вы получите пять уравнений для определения X2.
Так что в этом случае задача может быть решена. В принципе, это можно определить с учетом силы трения. При рассмотрении этой проблемы, если для координатных осей используется естественная ось, дифференциальное уравнение для движения точки вдоль гладкой кривой принимает вид: m ^ = F ;; w- = F „+ Nn; 0 = K + AL dz2Чр ■ И> 0 0 Где Et — проекция силы F на касательную. Fn и N „-Проекция сил на главную нормаль. Fb и Nb —Проекция сил на бинормаль. P — радиус кривизны кривой. Из первого дифференциального уравнения системы (20) мы можем найти закон движения точки и, следовательно, скорость точки v, независимо от двух других уравнений.
Используя теорему Резаля для решения задачи о поведении оси такого гироскопа, можно определить вектор момента движения по известному главному моменту внешней силы. Людмила Фирмаль
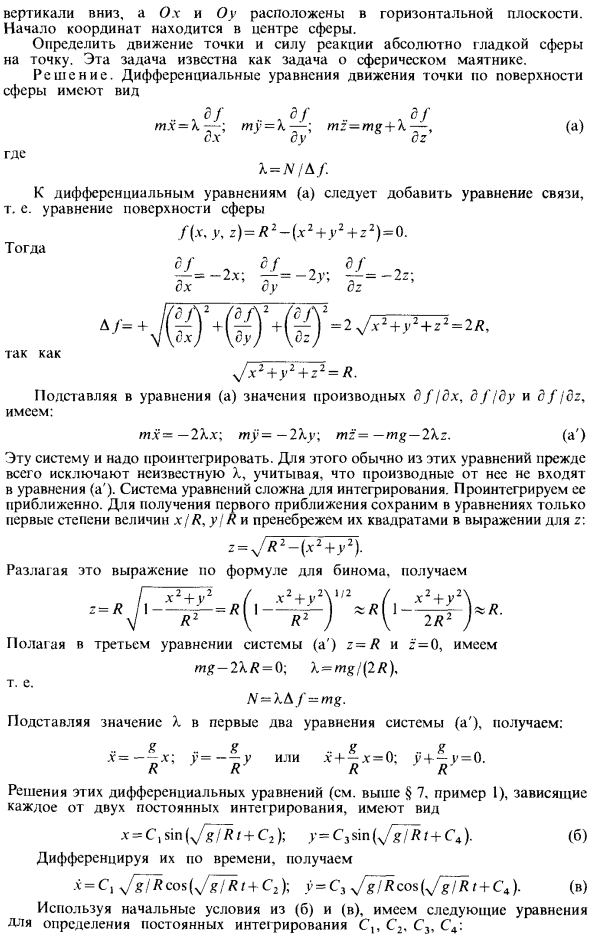
Оставшиеся два уравнения (20) могут затем использоваться для определения проекции неизвестного нормального отклика N на основной и субнормальный. Пример. Точка массы m (рис. 13) движется вдоль внутренней части поверхности сферы радиуса R, близкой к устойчивому положению равновесия под действием силы тяжести. Первый момент = = 0 x = x0, y = 0, t \ = 0, »=» о-Ос * O Oz (20) Вертикально вниз, Oh и Oy находятся в горизонтальной плоскости. Происхождение находится в центре сферы. Определите движение точки и силу реакции абсолютно гладкой сферы на точке. Эта проблема известна как проблема шарикового маятника.
Решения. Форма дифференциального уравнения для движения точки на поверхности сферы имеет вид (А) X = N! Bf. К дифференциальному уравнению (а) нужно добавить уравнение связи, то есть уравнение для поверхности сферы / (X, y, z) = «2- (x2 + y Формула (а) Значения производных df / dx, df / dy и df / 8z. Их = -2Xx; tu = -2Xu; mz = -mg — 2’kz. (А ‘) Интегрировать эту систему. Для этого обычно из этих уравнений Неизвестный X полностью исключен, потому что его производная не включена в уравнение (a ‘). Одновременные уравнения трудно интегрировать. Интегрировать примерно. Чтобы получить первое приближение, сохраняйте в уравнении только первую степень x / R, yl или игнорируйте эти квадраты в выражении z. -V * 2- (x2 + y2).
Бином, мы получаем Разложить это выражение Предположим, что z = R mg-2XR = 0 в третьем уравнении (a ‘) системы. k = мг / (2R). N-Xh f = мг. Подстановка значения X в первых двух уравнениях (a ‘) системы дает Каждое из решений этих дифференциальных уравнений (см. § 7. Пример 1 выше) зависит от двух интегральных констант и имеет вид x = c, sin (x / i7 «» + c2); y = c3sin (7F7Kz + c4). (В) Дифференцируя их по времени, * = C> x / jf7 «cos (y ^ 7s / + C2); y = Czj /


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://studizba.com/lectures/73-fizika/1054-lekcii-po-dinamike/19164-4-dinamika-nesvobodnoy-materialnoy-tochki-otnositelnoe-dvizhenie-materialnoy-tochki.html
http://lfirmal.com/dvizhenie-nesvobodnoj-materialnoj-tochki/