Основное уравнение динамики вокруг неподвижной оси
Пусть Ji — момент инерции точки массой mi находящейся на расстоянии Ri от оси вращения,
Момент инерции тела служит мерой инертности при вращательном движении, так же как масса — мера инертности при поступательном движении.
В общем случае тело состоит из огромного количества точек, и все они находятся на разных расстояниях от оси вращения. Момент инерции системы (тела) равен
В случае непрерывного распределения масс
где ρ — плотность тела; dV — объем малого элемента тела массы dm, отстоящего от оси вращения на расстоянии R.
Просуммировав выражение (1.7.6) по всем i-м точкам, получим
Это основное уравнение динамики тела, вращающегося вокруг неподвижной оси. (Сравним: ma = F — основное уравнение динамики поступательного движения тела).
Для момента импульса L тела, вращающегося вокруг оси z, имеем
(Сравним: p = mv — для поступательного движения).
При этом помним, что L и М — динамические характеристики вращательного движения, направленные всегда вдоль оси вращения. Причем L определяется направлением вращения, как и ω, а направление М зависит от того, ускоряется или замедляется вращение.
Лабораторная работа 1-05 проверка основного уравнения динамики вращательного движения при вращении тел вокруг неподвижной оси

ЛАБОРАТОРНАЯ РАБОТА 1-05
ПРОВЕРКА ОСНОВНОГО УРАВНЕНИЯ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ПРИ ВРАЩЕНИИ ТЕЛ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Цель работы: изучение динамики вращательного движения, экспериментальное подтверждение основного уравнения динамики вращательного движения вокруг неподвижной оси и справедливости теоремы Гюйгенса–Штейнера.
Приборы и принадлежности: крестообразный маятник Обербека, снабженный электронным секундомером, набор грузов определенной массы, прибор для измерения длины.
ВВЕДЕНИЕ
Основное уравнение динамики вращательного движения имеет следующий вид:
 , (1)
, (1)
где L = Jw — момент импульса вращающегося тела; J – момент его инерции относительно оси вращения; w — угловая скорость вращения и М = [r,F] – момент силы. Дифференцируя последнее равенство, получим
 . (2)
. (2)
Если вращение осуществляется вокруг неподвижной оси и если момент инерции остается постоянным, то уравнение (2) примет вид
 . (3)
. (3)
Здесь Jz и Мz – момент инерции и момент силы относительно неподвижной оси z. Угловое ускорение e связано с линейным ускорением точек, расположенных на расстоянии r от оси вращения, уравнением
Линейное ускорение, в свою очередь, связано с перемещением h и временем перемещения t, при условии, что начальная скорость перемещения равна нулю
 . (5)
. (5)
Моменты инерции простых тел относительно оси, проходящей через центр масс, известны. Теорема Гюйгенса–Штейнера позволяет определить момент инерции относительно любой другой оси, если она параллельна оси, проходящей через центр масс
 , (6)
, (6)
где J0 – момент инерции относительно оси, проходящей через центр масс; m – масса тел; R – расстояние между осями.
Приведенные зависимости позволяют решить поставленную задачу.
 Схема маятника Обербека приведена на рис. 1. Два шкива различных диаметров 1 и 2 могут легко вращаться вокруг неподвижной оси 3. Шкивы соединены плотной шайбой, в боковой поверхности которой закреплены симметрично четыре спицы 4, расположенные под прямым углом друг к другу. На спицы можно надевать грузы (mгр), которые могут перемещаться вдоль спиц 4. При этом изменяется момент инерции маятника, который зависит от расстояния R между центрами грузов и осью вращения. На один из шкивов 1 или 2 намотана нить, к концу которой привязана платформа 6 известной массы m0. На эту платформу можно помещать грузы различной массы mi 7. В зависимости от массы этого груза изменяется вращающий момент. Нить перекинута через блок 8 с указателем 9. Расстояние между указателем 9 и основанием прибора определяет высоту h падения платформы с соответствующим грузом mi. Выключатель 10 служит для освобождения груза с платформой и для запуска (остановки) секундомера.
Схема маятника Обербека приведена на рис. 1. Два шкива различных диаметров 1 и 2 могут легко вращаться вокруг неподвижной оси 3. Шкивы соединены плотной шайбой, в боковой поверхности которой закреплены симметрично четыре спицы 4, расположенные под прямым углом друг к другу. На спицы можно надевать грузы (mгр), которые могут перемещаться вдоль спиц 4. При этом изменяется момент инерции маятника, который зависит от расстояния R между центрами грузов и осью вращения. На один из шкивов 1 или 2 намотана нить, к концу которой привязана платформа 6 известной массы m0. На эту платформу можно помещать грузы различной массы mi 7. В зависимости от массы этого груза изменяется вращающий момент. Нить перекинута через блок 8 с указателем 9. Расстояние между указателем 9 и основанием прибора определяет высоту h падения платформы с соответствующим грузом mi. Выключатель 10 служит для освобождения груза с платформой и для запуска (остановки) секундомера.
МЕТОДИКА ПРОВЕРКИ ОСНОВНОГО ЗАКОНА
Возможны два способа проверки основного закона динамики вращательного движения тел вокруг неподвижной оси:
а) установить линейную зависимость
б) установить линейную зависимость
а) Первый способ.
Груз mi, помещенный на платформу 6, создает вращающий момент Mi = = T × r, где Т – сила натяжения нити и r – радиус шкива, на который намотана нить. По второму закону Ньютона
где а – ускорение падающего груза с платформой. Момент силы натяжения равен
Сумма моментов сил, действующих на шкив:
Mi – Mтр = m(g – a)r – Mтр.= J× ,
,
где Мтр – момент силы трения
Здесь m = m0 + mi – масса платформы 6 с грузом 7.
В соответствии с теоремой Гюйгенса–Штейнера момент инерции крестовины с надетыми на спицы грузами mгр, равен
Суммарная масса крестовины со стержнями и надетыми на них грузами много больше массы груза с платформой. Кроме того, r mmin. Результаты внесите в табл. 1. Внизу таблицы запишите значение радиуса r того шкива, на котором намотана нить.
3. Установите на платформе груз mi > mmin. Не меняйте этот груз в течение всего опыта (M = const). В опыте изменяют момент инерции перемещением грузов mгр по спицам, изменяя расстояние R. При каждом значении R определите три раза время падения груза с платформой с высоты h. Результаты внесите в табл. 2.
Лекция №6. ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
4.7. Основное уравнение динамики вращательного движения относительно неподвижной оси.
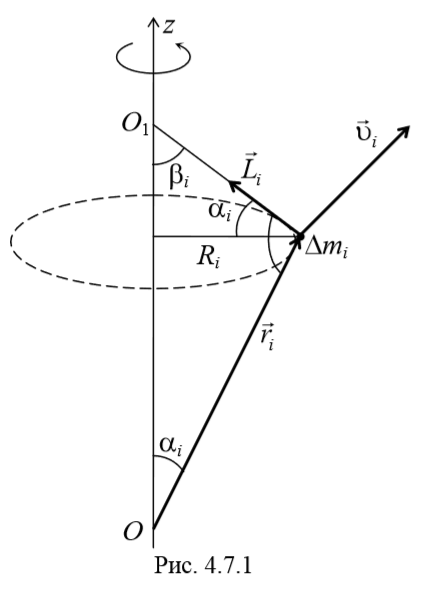
Рассмотрим вращательное движение твердого тела относительно неподвижной оси Oz . Так как твердое тело можно представить как совокупность материальных точек, то воспользуемся основным уравнением динамики вращательного движения относительно точки (4.3.8).
Найдем проекции правой и левой части уравнения (4.7.1) на ось Oz :
Вектор L перпендикулярен радиус-вектору и образует с осью и образует с осью Oz угол βI = 90° − αI . Поэтому проекция момента импульса материальной точки равна

Подставим правую часть уравнения (4.7.4) в (4.7.3)
Используя $$<\sum^n>$$ miR 2 i=Iz , получим момент импульса твердого тела относительно неподвижной оси Oz
Подставляя (4.7.6) в выражение (4.7.1)
и учитывая, что $$ dω \over dt$$ =ε , получим основное уравнение динамики вращательного движения относительно неподвижной оси
Угловое ускорение при вращении твердого тела относительно неподвижной оси прямо пропорционально результирующему моменту внешних сил относительно этой оси и обратно пропорционально моменту инерции тела относительно этой же оси.
Физический смысл момента инерции можно определить из выражения (4.7.8). Если сравнить с основным уравнением динамики поступательного движения (2.1.2), то можно увидеть что роль массы при вращательном движении выполняет момент инерции. Момент инерции тела является мерой инерции тела при вращательном движении.
Если проекция моментов внешних сил относительно оси Oz равна нулю (например, система замкнута) $$

Если проекцию моментов внешних сил относительно оси z равна нулю, то момент импульса тела относительно этой оси с течением времени не будет изменяться.
4.8. Расчет моментов инерции.
1) Момент инерции однородного полого цилиндра.
Определим момент инерции однородного полого цилиндра, внешний радиус которого R2 , а внутренний радиус R1 , относительно оси симметрии. Разобьем цилиндр на концентрические цилиндрические кольца толщиной dr . Все кольца находятся на одинаковом расстоянии от оси, равном r . Если плотность вещества постоянна, то элементарная масса dm=ρdV , где dV − объем бесконечно тонкого кольца радиусом r , толщиной dr и высотой h . Поскольку dV=(2πr)hdr , то dm=2πρrhdr .
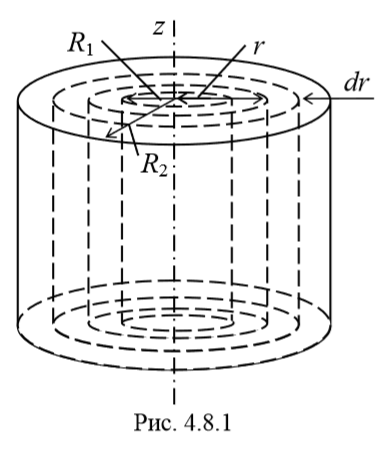
Таким образом, момент инерции получается посредством интегрирования по всем кольцам:
Поскольку (R 4 2-R 2 1)(R 2 2+R 2 1) , то момент инерции равен
Объем полого цилиндра V=Sh=πh(R 2 2-R 2 1) , тогда его масса m=ρV=πρh(R 2 2-R 2 1) .
Таким образом, момент инерции полого цилиндра
2) Момент инерции тонкостенного цилиндра (обода). Используя формулу (4.8.1) и учитывая, что R1=R2=R , получим
3) Момент инерции однородного сплошного цилиндра (диска). Используя формулу (4.8.1) и учитывая, что в этом случае R1=0 и R2=R , то момент инерции
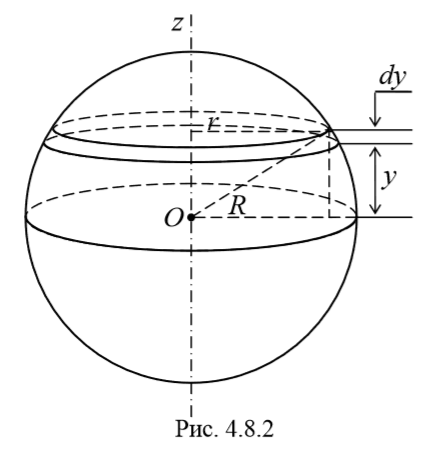
4) Момент инерции однородного шара. Определим момент инерции однородного твердого шара радиусом R , относительно оси, проходящей через его центр. Разобьем шар на бесконечно малые цилиндры высотой dy . Каждый такой цилиндр имеет радиус $$
Следовательно, момент инерции любого бесконечно малого цилиндра можно записать в виде:
Интегрируя по всем бесконечно малым цилиндрам, получим:
Поскольку объем шара равен V= $$4\over3$$ πR 3 , то его масса m=ρV= $$4\over3$$ πρR 3 .
Таким образом, момент инерции шара будет равен
5) Момент инерции однородного стержня. Момент инерции стержня длиной l относительно оси проходящей через середину стержня перпендикулярно его длине:
4.9. Кинетическая энергия вращающегося тела.
Рассмотрим вращение твердого тела вокруг неподвижной оси. Линейная скорость элементарной массы mi равна υi=ωRi , где Ri − расстояние от элементарной массы до оси вращения. Кинетическая энергия этой элементарной массы получается выражением
Кинетическая энергия тела складывается из кинетических энергий его частей, т. е.

Так как величина $$<\sum_
Рассмотрим плоское движение тела, которое может быть представлено как наложение двух движений − поступательного с некоторой скоростью υ o и вращательное вокруг соответствующей оси с угловой скоростью ω .
Кинетическая энергия тела при плоском движении слагается из энергии поступательного движения со скоростью, равной скорости центра масс, и энергии вращения вокруг оси, проходящей через центр масс тела, т. е.
4.10. Работа силы при вращении тела.
Работа, совершаемая всеми приложенными к телу силами, идет на изменение его кинетической энергии:
Подставим в последнее выражение уравнение (4.9.3) и продифференцируем

учитывая, что $$dω \over dt$$ =ε и ωdt=Mzdφ , получим
Тогда элементарная работа, совершаемая силами, приложенными к телу
и полная работа при повороте тела на угол φ за время t
http://pandia.ru/text/78/002/45210.php
http://physics.belstu.by/mechanics_lk/mechanics_lk6.html