Лекция №5. ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
4.1. Динамика поступательного движения твердого тела.
Движение любого твердого тела можно рассматривать как сумму поступательного движения его центра масс и вращательного движения относительно оси, проходящей через его центр масс.
Разобьем твердое тело на элементарные массы mi , тогда его можно представить как систему материальных точек, взаимное расположение которых остается неизменным. Поэтому для описания поступательного движения тела можно использовать закон изменения импульса механической системы
p = $$<\sum_
Также можно воспользоваться понятием центра масс и к поступательному движению твердого тела применить закон движения центра масс
Центр масс твердого тела движется как материальная точка, в которой сосредоточена масса тела, и на которую действуют все силы, приложенные к телу. Уравнение (4.1.2) дает возможность установить закон движение центра масс твердого тела, если известна масса тела и действующие на него силы. Если тело движется только поступательно, то это уравнение будет определять не только закон движения центра масс, но и любой другой точки тела.
4.2. Момент импульса. Момент силы.
Момент силы. Векторная величина, равная векторному произведению радиус-вектора r точки, проведенному из полюса в точку приложения силы, на силу F называется моментом силы материальнойточки относительно некоторого центра
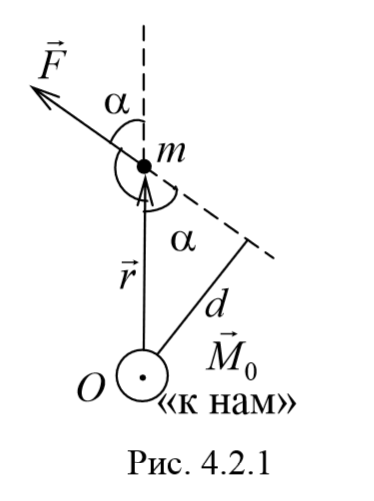
Пусть на частицу массой m действует сила F , а ее положение в некоторой инерциальной системе отсчета характеризуется радиус-вектором r относительно начала координат. Тогда момент силы частицы относительно точки O дается уравнением (4.2.1). Направление момента силы M совпадает с направлением поступательного движения правого винта при его вращении от радиус-вектора r к силе F , и он перпендикулярен как вектору r , так и вектору F (рис. 4.2.1). Тогда модуль вектора момента силы равен

где d=r sin α − плечо силы относительно точки O .
Плечо силы − это расстояние, измеряемое по перпендикуляру от оси вращения до линии, вдоль которой действует сила.
Таким образом, модуль момента силы относительно оси, есть скалярная величина, характеризующая вращательное движение действия силы и равная произведению модуля силы F , действующей на твердое тело, на плечо силы d относительно этой оси.
Если на тело действует несколько сил, то суммарный момент этих сил равен векторной сумме моментов всех сил относительно данной оси:
Момент импульса. Векторная величина, равная векторному произведению радиус-вектора r точки, проведенного из центра на ее импульс m υ называется моментом импульса материальной точки относительно некоторого центра
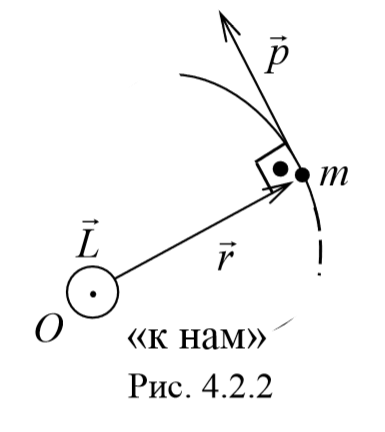
Пусть частица массой m имеет импульс p , а ее положение в некоторой инерциальной системе отсчета характеризуется радиус-вектором r относительно начала координат. Тогда момент импульса частицы относительно точки O дается уравнением (4.2.4). Направление момента импульса совпадает с направлением поступательного движения правого винта при его вращении от радиус-вектора к импульсу p , и он перпендикулярен как вектору r , так и вектору p (рис. 4.2.2). Тогда модуль вектора момента импульса равен
где d − плечо импульса относительно точки O .
Плечо импульса − это расстояние, измеряемое по перпендикуляру от оси вращения до линии, вдоль которой направлен импульс.
Таким образом, модуль вектора момента импульса относительно центра или оси − есть скалярная величина, равная произведению импульса p на плечо импульса d относительно этой оси.
Моментом импульса механической системы относительно некоторого центра называется векторная величина, равная геометрической сумме моментов импульса относительно той же точки всех материальных точек системы

4.3. Основное уравнение динамики вращательного движения относительно точки.
Рассмотрим систему материальных точек массами m1, m2, . mn движущихся со скоростями υ 1, υ 2, . υ n . Пусть на каждую из этих точек действуют: равнодействующие внутренних сил F i 1, F i 2, . F i n , и равнодействующие внешних сил F e 1, F e 2, . F e n .
Запишем уравнения движения частиц:

Умножим каждое уравнение системы (4.3.3) на соответствующий радиус-вектор и получим
Преобразуем данные уравнения
Сложим эти уравнения и получим

В последнем уравнении:
Таким образом, выражение (4.3.6) можно записать в виде
Учитывая, что моменты внутренних сил попарно уравновешивают друг друга, и сумма моментов всех внутренних сил для любой системы всегда равна нулю, т. е. $$<\sum_
4.4. Закон сохранения момента импульса.
Если момент внешних сил $$<\sum_
закон сохранения момента импульса.
Если момент внешних сил действующих на механическую систему относительно центра оси равен нулю, то момент импульса системы относительно этого центра с течением времени не изменяется.
Можно сказать, что момент силы при вращательном движении является аналогом силы при поступательном движении, момент импульса − аналогом импульса.
Законы изменения и сохранения момента импульса механической системы можно применить и к вращательному движению твердого тела.
4.5. Момент инерции.
Моментом инерции твердого тела относительно данной оси называется физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг этой оси и равная сумме произведений масс всех частиц тела на квадраты их расстояний от той же оси:
Момент инерции зависит только от формы тела и расположения масс относительно оси. [I]=1 кг · м 2 .
Понятие момента инерции было введено при рассмотрении вращения твердого тела. Однако следует иметь в виду, что каждое тело, независимо от того, вращается оно или покоится, обладает определенным моментом инерции относительно любой оси.
Если тело сплошное, то суммирование в выражении (4.5.1) следует заменить на интегрирование:
где R − расстояние от элементарной массы dm до оси вращения.
4.6. Теорема Штейнера. Правило аддитивности
Существуют два свойства момента инерции:
1) Теорема Штейнера: момент инерции тела Iz относительно произвольной оси равен сумме момента инерции Ic относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела m на квадрат расстояния a между осями:
2) Правило аддитивности: сумма моментов инерции частей системы относительно оси равен моменту инерции системы относительно данной оси:
Конспект по физике «Динамика вращательного движения» (10 класс)
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Основное уравнение динамики вращательного движения .
Абсолютно твердое тело – тело, расстояние между двумя любыми точками которого остается неизменным при любых движениях и деформациях.
Следовательно, форма и размеры абсолютно твердого тела не изменяются при действии на него любых сил.
Абсолютно твердое тело – физическая модель (в природе не существует). Тело можно считать абсолютно твердым, если деформации малы.
Вращательное движение абсолютно твердого тела вокруг неподвижной оси – движение, при котором все точки тела описывают окружности, центры которых находятся на одной прямой, перпендикулярной плоскостям этих окружностей. Сама эта прямая есть ось вращения ( OO ’).
Примеры вращательного движения: вращение валов двигателей, колес, турбин, пропеллеров самолетов, вращение Земли вокруг совей оси.
Динамика вращательного движения абсолютно твердого тела изучает причины появления углового ускорения у тела, которое может вращаться вокруг оси и позволяет вычислить его величину.
При вращательном движении твердого тела вокруг закрепленной оси масса уже не является мерой его инертности, а сила недостаточна для характеристики внешнего воздействия. Таким образом, для описания вращательного движения твердого тела необходимо ввести новые характеристики:
1) При вращательном движении силовое воздействие характеризуется не силой, а
Момент силы (М) – векторная физическая величина, модуль которой равен произведению модуля силы на ее плечо.
Плечо силы ( d ) – длина перпендикуляра, опущенного из оси вращения на линию действия силы.

 1Н∙м — момент силы в 1Н, линия действия которой отстоит от оси вращения на 1м.
1Н∙м — момент силы в 1Н, линия действия которой отстоит от оси вращения на 1м.
Если линия действия силы проходит через ось вращения, то момент силы относительно этой оси равен нулю. Эта сила не вызывает вращения.
Вектор момента силы направлен вдоль оси вращения. Направление момента силы определяется по правилу правой руки . Для этого необходимо изобразить вектор силы и радиус вектор точки приложения этой силы исходящими из одной точки. За направление вращения выберем направление поворота от  к
к  . Расположим правую руку таким образом, чтобы направление кончиков четырех согнутых пальцев показывало направление поворота от к , тогда направление отогнутого большого пальца укажет направление момента силы.
. Расположим правую руку таким образом, чтобы направление кончиков четырех согнутых пальцев показывало направление поворота от к , тогда направление отогнутого большого пальца укажет направление момента силы.
2) Мерой инерции при вращательном движении является
Момент инерции материальной точки относительно оси вращения – физическая величина, равная  , где
, где  — кратчайшее расстояние от оси вращения до точки.
— кратчайшее расстояние от оси вращения до точки.

1 кг∙м 2 – момент инерции тела, при котором под действием момента силы в 1Н∙м тело приобретает угловое ускорение в  .
.
Момент инерции тела равен сумме моментов инерции отдельных его частей:

где  — масса элемента абсолютно твердого тела;
— масса элемента абсолютно твердого тела;  – кратчайшее расстояние от элемента тела до оси вращения.
– кратчайшее расстояние от элемента тела до оси вращения.
Если масса тела является инвариантной величиной (одинаковой в различных системах отсчета) и не зависит от того, как тело движется, то момент инерции абсолютно твердого тела зависит :
1) От массы тела;
2) От формы и размеров тела;
3) От распределения массы относительно оси вращения (при переносе оси вращения, изменении ее направления, а также переносе отдельных частей тела его момент инерции изменяется) .
У твердых тел момент инерции относительно данной оси – постоянная величина. Момент инерции тел относительно оси вращения, проходящей через центр масс у многих тел известен:
Ось вращения проходит
через центр обруча, перпендикулярно его плоскости


через центр цилиндра, перпендикулярно плоскости его основания


через центр диска вдоль его диаметра


через центр шара


Стержень длиной l
через середину тонкого стержня, перпендикулярно ему


 При переносе оси вращения или отдельных частей тела относительно этой оси его момент инерции изменяется. Соотношение между моментами инерции тела относительно некоторой оси вращения, проходящей через центр масс, относительно произвольной параллельной ей оси устанавливается с помощью теоремы Штейнера : момент инерции тела относительно произвольной оси вращения равен сумме момента инерции этого тела, взятого относительно параллельной ей оси, проходящей через центр масс, и произведения массы тела на квадрат расстояния между осями.
При переносе оси вращения или отдельных частей тела относительно этой оси его момент инерции изменяется. Соотношение между моментами инерции тела относительно некоторой оси вращения, проходящей через центр масс, относительно произвольной параллельной ей оси устанавливается с помощью теоремы Штейнера : момент инерции тела относительно произвольной оси вращения равен сумме момента инерции этого тела, взятого относительно параллельной ей оси, проходящей через центр масс, и произведения массы тела на квадрат расстояния между осями.
Проведем некоторую ось вращения О, проходящую через центр масс абсолютно твердого тела. Выберем другую произвольную ось О’, параллельную оси О и отстоящую от нее на расстоянии d . Пусть момент инерции относительно центра масс известен и равен Io . Тогда, согласно Тереме Штейнера момент инерции относительно оси O ’ равен:
Выведем основное уравнение динамики вращательного движения. Рассмотрим частицу массы m , вращающуюся вокруг оси по окружности радиуса R , под действием результирующей силы , лежащей в плоскости оси вращения. В инерциальной системе отсчета справедлив II закон Ньютона. Запишем его применительно к произвольному моменту времени:  .
.
 Разложим силу на две составляющие: нормальную
Разложим силу на две составляющие: нормальную  и тангенциальную
и тангенциальную  . Нормальная составляющая силы не способна вызвать вращение частицы с угловым ускорением, поэтому рассмотрим только действие ее тангенциальной составляющей. В проекции на тангенциальное направление II закон Ньютона примет вид:
. Нормальная составляющая силы не способна вызвать вращение частицы с угловым ускорением, поэтому рассмотрим только действие ее тангенциальной составляющей. В проекции на тангенциальное направление II закон Ньютона примет вид:  .
. 
Но 

 – основное уравнение динамики вращательного движения материальной точки.
– основное уравнение динамики вращательного движения материальной точки.
Этому уравнению можно придать векторный характер, учитывая, что наличие момента сил вызывает появление параллельного ему вектора углового ускорения, направленного вдоль оси вращения:
 — произведение момента инерции материальной точки на угловое ускорение равно результирующему моменту сил, действующих на материальную точку.
— произведение момента инерции материальной точки на угловое ускорение равно результирующему моменту сил, действующих на материальную точку.
Т.к.  то
то 
Для вывода основного уравнения динамики абсолютно твердого тела необходимо разделить это тело на достаточно малые элементы mi , каждый из которых можно считать материальной точкой. Записать для каждой материальной точки основное уравнение динамики вращательного движения материальной точки и все эти уравнения почленно сложить:

 — основное уравнение динамики вращательного движения абсолютно твердого тела.
— основное уравнение динамики вращательного движения абсолютно твердого тела.
Произведение момента инерции тела относительно оси вращения на угловое ускорение тела равно сумме моментов (относительно той же оси)всех внешних сил, приложенных к телу.
Основное уравнение динамики вращательного движения тела устанавливает зависимость углового ускорения от момента силы и момента инерции.
Ускорение при вращательном движении зависит :
1) Не только от массы, но и от ее распределения относительно оси вращения;
2) Не только от силы, но и от точки ее приложения и направления действия.
Основное уравнение движения абсолютно твердого тела
«Физика — 10 класс»
При любом ли движении тела можно использовать такую его модель, как материальная точка?
Какие модели тела ещё существуют?
Поступательное движение твёрдого тела.
Описание движения тела считается полным лишь тогда, когда известно, как движется каждая его точка.
Мы много внимания уделили описанию движения точки. Именно для точки вводятся понятия координат, скорости, ускорения, траектории. В общем случае задача описания движения тел является сложной. Особенно она сложна, если тела заметно деформируются в процессе движения. Проще описать движение тела, взаимное расположение частей которого не изменяется.
Тело, расстояние между любыми двумя точками которого остаётся постоянным при его движении, называется абсолютно твёрдым.
Абсолютно твёрдое тело — это одна из механических моделей, используемых при описании движения и взаимодействия тел.
На самом деле абсолютно твёрдых тел нет. Но в тех случаях, когда реальные тела при движении мало деформируются, их можно рассматривать как абсолютно твёрдые. Однако и движение абсолютно твёрдого тела в общем случае оказывается весьма сложным. Самое простое движение абсолютно твёрдых тел — поступательное.
Поступательным называется такое движение абсолютно твёрдого тела, при котором любой отрезок, соединяющий любые две точки тела, остаётся параллельным самому себе.
При поступательном движении все точки тела совершают одинаковые перемещения, описывают одинаковые траектории, проходят одинаковые пути, имеют в каждый момент времени равные скорости и ускорения. Покажем это.

Пусть тело движется поступательно (рис. 1.58). Соединим две его произвольные точки В и А отрезком. Расстояние |АВ| не изменяется, так как тело абсолютно твёрдое. При поступательном движении остаются постоянными модуль и направление вектора  . Вследствие этого траектории точек В и А одинаковы, так как они могут быть полностью совмещены параллельным переносом на вектор .
. Вследствие этого траектории точек В и А одинаковы, так как они могут быть полностью совмещены параллельным переносом на вектор .
Согласно рисунку 1.58 перемещения точек А и В одинаковы и совершаются за одно и то же время. Очевидно, что любая точка твёрдого тела, например С, движется так же, как точки А и В.
Следовательно, точки А и В имеют одинаковые скорости и ускорения.
Совершенно очевидно, что для описания поступательного движения абсолютно твёрдого тела достаточно описать движение какой-либо одной его точки.

>Лишь при поступательном движении можно говорить о скорости и ускорении тела.
Примерно поступательно движутся ящик письменного стола, поршни двигателя автомобиля относительно цилиндров, вагоны на прямолинейном участке железной дороги, резец токарного станка относительно станины. Движение педали велосипеда или кабины колеса обозрения в парках (рис. 1.59, 1.60) — также примеры поступательного движения.
Для описания поступательного движения абсолютно твёрдого тела достаточно написать уравнение движения одной из его точек.
Вращательное движение абсолютно твёрдого тела.
Вращательное движение вокруг неподвижной оси — ещё один частный случай движения твёрдого тела.
В технике такой вид движения встречается очень часто: например, вращение валов двигателей и генераторов, турбин и пропеллеров самолётов.

Вращательным движением абсолютно твёрдого тела вокруг неподвижной оси называется такое его движение, при котором все точки тела описывают окружности, центры которых находятся на одной прямой, называемой осью вращения, при этом плоскости, которым принадлежат эти окружности, перпендикулярны оси вращения.
Источник: «Физика — 10 класс», 2014, учебник Мякишев, Буховцев, Сотский
Кинематика — Физика, учебник для 10 класса — Класс!ная физика
http://infourok.ru/konspekt-po-fizike-dinamika-vrashatelnogo-dvizheniya-10-klass-5780683.html
http://class-fizika.ru/10_a17.html