Основное уравнение движения асинхронного двигателя
Понятие асинхронной машины связано с тем, что ротор ее имеет частоту вращения, отличающуюся от частоты вращения магнитного поля статора.
Буква «а» здесь играет как бы роль отрицания или нестрогого следования ротора за синхронно вращающимся магнитным полем статора.
Создателем этой простой по конструкции, но удобной и надежной в работе машины является русский инженер М.О. Доливо-Добровольский. Асинхронный двигатель, впервые разработанный в 1889 году, практически не подвергся серьезным изменениям до наших дней.
В основу конструкции асинхронного двигателя положено создание системы трехфазного переменного тока принадлежащее этому же автору.
Переменный ток, подаваемый в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное поле.
Основными конструктивными элементами асинхронного двигателя являются неподвижный статор и подвижный ротор (рис. 5.1.1). Статор и ротор разделены воздушным зазором от 0,1 мм до 1,5 мм. Пакет статора c целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали. На внутренней полости статора имеются пазы, в которые укладываются провода обмотки. Листы статора перед сборкой в пакет изолируют слоем лака или окалины, полученной при их отжиге.

В пазы статора укладывают обмотку, которая в простейшем случае состоит из трех катушек — фаз, сдвинутых в пространстве на 120 эл. градусов. Ротор асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали. На поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора специально не изолируют, т.к. в большинстве случаев достаточно изоляции от окалины.
В зависимости от типа обмотки роторы двигателей обычного исполнения делятся на короткозамкнутые и фазные.
Обмотка короткозамкнутого ротора представляет собой медные стержни, забитые в пазы. С двух сторон эти стержни замыкаются кольцами. Соединения стержней с кольцами осуществляется пайкой или сваркой (рис. 5.1.2).
Чаще всего короткозамкнутую обмотку выполняют расплавленным, алюминием и литьем под давлением. При этом вместе со стержнями и кольцами отливаются и лопатки вентилятора.
Двигатели большой мощности имеют на роторе фазную обмотку. Конструкция ее аналогична обмотке статора. Концы этой обмотки выведены на контактные кольца. С помощью этих колец и токосъемных щеток к обмотке ротора подключают дополнительные сопротивления.
5.2. ПРИНЦИП ОБРАЗОВАНИЯ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ МАШИНЫ
На статоре трехфазного двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты друг от друга во времени на 1/3 периода (рис. 5.2.1.).

Используя график изменения трехфазного тока, проставим на нем несколько отметок времени; tl, t2, t3. tn. Наиболее удобными будут отметки, когда один из графиков пересекает ось времени.
Теперь рассмотрим электромагнитное состояние обмоток статора в каждые из принятых, моментов времени.
Рассмотрим вначале точку t1. Ток в фазе А равен нулю, в фазе С он будет положительным — (+) , а в фазе В — отрицательным (·) (рис. 5.2.2, а).
Поскольку каждая фазная обмотка имеет замкнутую форму, то конец фазной обмотки В-У будет иметь противоположный знак, т.е. У — (+), а конец Z обмотки C-Z — (·).
Известно, что вокруг проводника с током всегда образуется магнитное поле. Направление его определяется правилом правоходового винта («буравчика»).
Проведем силовую магнитную линию вокруг проводников С и У и, соответственно, В и Z (см. штриховые линии на рис. 5.2.2 a).
Рассмотрим теперь момент времени t2. В это время тока в фазе В не будет. В проводнике А фазы А-Х он будет иметь знак (+), а в проводнике С фазы C-Z он будет иметь знак (·). Теперь проставим знаки: в проводнике Х — (·), а в проводнике Z — (+).
Проведем силовые линии магнитного поля в момент времени t2 (рис. 5.2.2,б). Заметим при этом, что вектор F совершил поворот.
Аналогичным образом проведем анализ электромагнитного состояния в фазных обмотках статора в момент времени t3,…tn (рис. 5.2.2, б, в, г, д).
Из рисунков 5.2.2 наглядно видно, что магнитное поле в обмотках и его поток Ф совершают круговое вращение.
Частота вращения магнитного поля статора определяется следующей формулой:
где f — частота тока питающей сети, Гц; p — число пар полюсов.
Если принять f=50 Гц, то для различных чисел пар полюсов (р=1, 2, 3, 4, ) n1=3000, 1500, 1000, 750, об/мин.
5.3. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника, взаимодействуя с полем статора, создает электромагнитную силу — Fэм. Совокупность сил всех проводников обмотки создает электромагнитный момент М, который приводит ротор во вращение в направлении вращающего поля.
Частота вращения ротора n2 будет всегда меньше синхронной частоты n1, т.е. ротор всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается с частотой n2 равной частоте вращающегося поля статора n1. В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно, в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может вращаться синхронно c полем статора. Разность между частотами поля статора n2 и ротора n1 называется частотой скольжения D n.
 .
.
Отношение частоты скольжения к частоте поля называется скольжением:
 .*)
.*)
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение Sн обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
Обмотка ротора асинхронного двигателя электрически не связана с обмоткой статора. В этом отношении двигатель подобен трансформатору, в котором обмотка статора является первичной обмоткой, а обмотка ротора — вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора наводится неизменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя — потоком постоянным по величине, но вращающимся в пространстве. Эффект в том и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора, неподвижной, обмотка ротора двигателя вместе с ним вращается.
ЭДС роторной обмотки, в свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться, анализируя процессы, протекающие в асинхронном двигателе.
Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения D n. Она же наводит в обмотке ротора ЭДС E2, частота которой f2 связана со скольжением S:

Приняв величину номинального скольжения порядка 0,01-0,1, можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет 0,5-5 Гц (при f1=50 Гц).
5.4. МАГНИТНЫЕ ПОЛЯ И ЭДС АСИНХРОННОГО ДВИГАТЕЛЯ
При подключении обмотки статора к сети возникают токи I1, создающие вращающийся магнитный поток Ф. Большая часть магнитного потока сцепляется с обмотками ротора и статора. Это будет основной поток обмотки статора. Некоторая часть магнитного потока рассеивается в пространстве. Назовем его потоком рассеяния Фрс. Он cцепляется только с витками собственной обмотки.
Основной магнитный поток асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора со скоростью n1 и обмотку ротора со скоростью n2, наводя в них основные ЭДС:
 ;
; 
где W1k1 и W2k2 — произведения чисел витков на обмоточные коэффициенты; Е2s=Е2S.
Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2, которые, как в трансформаторе, могут быть выражены через соответствующие токи I1 и I2 и индуктивные сопротивления х1 и х2s.
 ;
; 
где х1 и х2s — индуктивные сопротивления рассеяния обмоток статора и ротора.
Помимо названных выше ЭДС, в обмотках статора и ротора имеют место активные падения напряжения, которые компенсируются соответствующими ЭДС Er1 и Еr2.
5.5. ОСНОВНЫЕ УРАВНЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Рассуждая аналогично пункту 4.3 составим основные уравнения асинхронного двигателя.
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора.

В роторной обмотке аналогичное уравнение будет иметь вид:

Но т.к. роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 ,
,
 .
.
5.6. ПРИВЕДЕНИЕ ПАРАМЕТРОВ ОБМОТКИ РОТОРА К ОБМОТКЕ СТАТОРА
Для того чтобы параметры ротора и статора изобразить на одной векторной диаграмме, произведем приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2, обмоточным коэффициентом k2 и числом витков W2 заменяют обмоткой с m1×k1×W1, соблюдая при этом энергетический баланс в роторе.
Не останавливаясь на методике приведения параметров, которая повторяется из раздела «трансформаторы», перепишем основные уравнения приведенного асинхронного двигателя:
1. 
2. 
3. 
5.7. ВЕКТОРНАЯ ДИАГРАММА АСИНХРОННОГО ДВИГАТЕЛЯ
Используя принципы построения векторной диаграммы для трансформатора, построим ее для асинхронного двигателя.
Вначале во втором основном уравнении величину r2‘ представим в виде:
 ,
,
что математически не противоречит друг другу.
Тогда само уравнение можно переписать:

Используя три основных уравнения двигателя, построим векторную диаграмму, которая, будет несколько напоминать диаграмму трансформатора (рис. 5.7.1).

Вторичное напряжение определяется вектором:
 ,
,
иначе говоря, асинхронный двигатель в электрическом отношении работает как трансформатор при активной нагрузке.
Мощность, отдаваемая вторичной обмоткой данного трансформатора
 ,
,
представляет собой полную механическую мощность, развиваемую двигателем.
5.8. СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения (рис. 5.8.1.). Таким образом, сложную магнитную цепь электрической машины можно заменить электрической схемой. Сопротивление r2‘(1 — S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу двигателя, а следовательно, изменению скольжения S.

5.9. ПОТЕРИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ
В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:

Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:

Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Воспользовавшись ранее полученной формулой
запишем выражение полной механической мощности:
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину механических Рмех и добавочных Рдоб потерь:
Коэффициент полезного действия есть отношение мощности на валу P2 к потребляемой мощности P1:
5.10. УРАВНЕНИЕ ВРАЩАЮЩЕГО МОМЕНТА
Вращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем машины. Вращающий момент математически можно выразить через электромагнитную мощность машины:
 ,
,
где w1=2pn1/60 — угловая частота вращения поля.
 .
.
Подставим в формулу M1 выражение Рэм=Рэ2/S и, разделив на 9,81, получим:
 ,
,
Отсюда следует, что момент двигателя пропорционален электрическим потерям в роторе. Подставим в последнюю формулу значение тока I2’:
 ,
,
 ,
,
где U1 — фазное напряжение обмотки статора.
5.11. МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ
В последнем выражении для M1 единственным переменным параметром является скольжение S. Зависимость М=f(S) получило название механической характеристики двигателя (рис. 5.11.1).
В момент пуска двигателя, когда n2=0, скольжение S=1, тогда:
 .
.
Под действием момента Mn ротор придет во вращение. В дальнейшем скольжение будет уменьшаться, а вращающий момент увеличиваться. При скольжении Sкр он достигает максимального значения Mmax.. Величина критического скольжения
 .
.
Тогда, подставив его значение в формулу для М, получим:
 .
.
Дальнейший разгон двигателя будет сопровождаться уменьшением скольжения и, вместе с тем уменьшением вращающего момента. Равновесие наступит, когда величине вращающего момента будет противостоять тормозной момент, вызванный нагрузкой.
При номинальной нагрузке будут номинальный вращающий момент Мн и номинальное скольжение Sн.
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя.
 .
.
Обычно она составляет величину от 1,7 до 2,5.
Отношение пускового момента к номинальному называется кратностью пускового момента
 .
.
Эта величина может быть меньше единицы (например, 0,8) и больше ее (до 1,2). При меньшей кратности двигатель следует включать в работу без нагрузки, и лишь после разгона подается нагрузка. Двигатель с кратностью Кп.м.>1 можно включать в сеть с полной нагрузкой.
5.12. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Эти характеристики снимаются экспериментально и представляют собой зависимость I1, М2, n2, cos j , h от нагрузки на валу двигателя P2.
Примерный вид характеристик приведен на рис. 5.12.1.
5.13. ПУСК, РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ.
На практике замечено, что ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой. В ряде случаев он превышает номинальный ток в 6 — 10 раз.
Такой нагрузки может не выдержать не только питающая сеть, но и сама обмотка статора. Поэтому для пуска крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов и автотрансформатора.

Принцип ограничения тока заключается в том, что к статорной обмотке двигателя на период пуска подводится пониженное напряжение. После разгона его дополнительные устройства от двигателя отключаются.
Иногда для снижения напряжения, подаваемого в обмотки статора, изменяют схему переключения обмоток. Например, асинхронный двигатель нормально работает по схеме «треугольник». Если на период пуска его обмотки включить «звездой», то на каждую фазу придется напряжение в  раз меньшее.
раз меньшее.
Двигатели с фазным ротором пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные сопротивления в цепь ротора, добиваются ограничения пускового тока.
Регулирование частоты вращения асинхронного двигателя определяется формулой:
 .
.
Здесь возможны три различных способа реализации:
Первый заключается в изменении частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока еще очень дороги, поэтому они мало применяются.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4), можно обеспечить различные частоты вращения магнитного поля (соответственно: 3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится специальным переключателем.
Этот способ регулирования ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое применение (например, для привода продольно-строгального станка при рабочем и обратном ходе).
Третий способ регулирования частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение скольжения S достигается введением в цепь ротора регулировочных сопротивлений. Такие схемы широко используются на грузоподъемных кранах.
К категории регулирования вращения вала двигателя относится так называемое реверсирование, т.е. изменение направления вращения на обратное. Осуществляется оно путем изменения порядка чередования фаз обмотки статора. На рис. 5.13.2. показана схема изменения направления вращения вала двигателя.
Торможение асинхронного двигателя может быть механическим и электрическим.
К механическим относятся торможения муфтами, электромагнитными лентами, колодками и т.д.
Иногда применяют электродинамическое торможение, когда после отключения двигателя от сети переменного тока в его обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно сокращает выбег ротора.
Чаще используется торможение «противовыключением». После отключения двигателя от сети его кратковременно включают на вращение в обратную сторону. Как только оставшаяся частота вращения ротора n2 станет равной нулю, двигатель отключается от сети.
5.14. ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Статор однофазного двигателя имеет однофазную обмотку, которая занимает 2/3 общего числа пазов статора. Ротор — коротко-замкнутый.
При подключении к сети однофазная статорная обмотка создает не вращающийся, а пульсирующий магнитный поток с амплитудой Ф. Этот поток может быть искусственно разложен на два вращающихся потока ФI и ФII, каждый из которых равен Ф/2. Обозначим ФI прямым потоком, а ФII — обратным. Частота вращения каждого потока — n1I=n1II=n1.
Предположим, что ротор двигателя уже вращается в направлении прямого потока. Тогда скольжение двигателя относительно прямого потока ФI равно:
 ,
,
а относительно обратного потока:
 .
.
Потоки ФI и ФII наводят в обмотке ротора ЭДС E2I и E2II, которые создают токи I2I и I2II. Известно, что частота тока в обмотке ротора пропорциональна скольжению f2=Sf1. Т.к. SII>SI, то ток, наведенный обратным полем, имеет частоту намного больше частоты, наведенной в обмотке ротора прямым полем f2II>f2I.
Пусть n1=1500 об/мин, n2=1450 об/мин, f1=50 Гц, тогда:
Нам также известно, что индуктивное сопротивление роторной обмотки x2 зависит от частоты f2:

Вращающие моменты двигателя пропорциональны магнитным потокам статора и токам в обмотке ротора. (М
Исходя из значений токов I2I и I2II и учитывая, что ФI=ФII можно записать:
Следовательно, если ротор двигателя уже вращается в сторону прямого потока, то он будет продолжать вращаться в этом направлении. Тормозящее воздействие МII не будет оказывать заметного влияния на работу двигателя.
Вспомним, что мы условно предполагали вращение ротора в сторону прямого потока ФI. А если бы он вращался вначале в сторону обратного потока ФII?
Тогда, проведя аналогичные рассуждения, можно заключить, что ротор будет устойчиво вращаться в сторону обратного потока. Рассмотрим механическую характеристику однофазного двигателя (рис. 5.14.2).
Из характеристики М=f(S) видно, что при пуске, когда S=1, пусковой момент Мп=О. Двигатель при включении его в сеть сам не начнет вращаться. Необходим его сдвиг в ту или иную сторону.
Если сдвинуть точку Мп влево от S=1, то момент будет положительным, если вправо — отрицательным.
Другими словами, направление устойчивого вращения ротора двигателя будет зависеть от направления первоначального импульса.
Проведенный анализ показал, что однофазный двигатель нуждается в принудительном пуске.
Пусковые устройства могут быть механическими (пуск от руки) и электрическими.
Первый способ пуска практически выжил себя, и на его смену пришел второй — электрический.
Для создания необходимого пускового момента однофазный двигатель снабжается дополнительной пусковой обмоткой. Эта обмотка размещается в оставшейся незаполненной 1/3 пазов.
Однофазный двигатель, таким образом, превратился в двухфазный. Двухфазный двигатель обладает вращающимся магнитным полем, если выполнены два обязательных условия.
Первое условие состоит в пространственном сдвиге рабочей и пусковой обмоток на 90 эл. градусов. Такое условие, легко реализуется на заводе-изготовителе.
Второе обязательное условие диктуется сдвигом по фазе тока в пусковой обмотке на 90° относительно тока в рабочей обмотке. Выполнение этого условия связано с включением в пусковую обмотку фазосдвигающего элемента, например, конденсатора (рис. 5.14.3).
После того как ротор двигателя придет во вращение, пусковую обмотку ПО отключают. Делается это с помощью выключателя В. Иногда в бытовой технике отключение пусковой обмотки производится автоматически по ходу разгона двигателя.
5.15. ДВУХФАЗНЫЙ КОНДЕНСАТОРНЫЙ ДВИГАТЕЛЬ
Двухфазный конденсаторный двигатель имеет на статоре две обмотки ОВ и ОУ, рассчитанные на длительное протекание тока. Обмотки располагаются в пространстве под углом 90 эл. градусов), а последовательно одной из них включают конденсатор С.
Двухфазный конденсаторный двигатель переменного тока обладает вращающимся магнитным полем (правда, не круговым, а эллиптическим). Поэтому он не нуждается в специальных пусковых устройствах (рис. 5.15 1.).
Двухфазный асинхронный двигатель, в отличие от трехфазного, имеет возможность плавного регулирования частоты вращения ротора.
Делается это одним из двух способов: амплитудным (изменением напряжения Uy) и фазным (изменением емкости конденсатора С).
Двухфазные двигатели получили широкое распространение в бытовых приборах и лабораторной практике.
В отличие от рассмотренных выше типов двигателей, интересен двигатель с полым ротором. Он имеет два статора, между которыми располагается ротор (рис. 5.15.2.).
Наружный статор 1 имеет обычно конструкцию с двухфазной обмоткой 4. Фазные обмотки сдвинуты в пространстве относительно друг друга на 90°. Внутренний статор 3 представляет собой пакет электротехнической стали без обмотки. В воздушном зазоре между статорами помещен ротор двигателя 2, который не имеет обмотки и выполнен в виде стакана с тонкими стенками из немагнитного материала (алюминия). Посредством втулки 6 ротор укреплен на валу двигателя 5. Такая конструкция обеспечивает ему незначительную инерцию и делает двигатель чувствительным даже к небольшим импульсам (сигналам) тока. Этому также способствует наличие второго статора, который уменьшает сопротивление магнитной цепи. Одна из фаз обмоток статора включается на напряжение сети Uс, другая является управляющей обмоткой. Когда напряжение на ней отсутствует, ротор неподвижен. С появлением управляющего сигнала Uу достаточной величины статор создает двухфазное вращающееся поле, и двигатель развивает вращающий момент, величина которого пропорциональна Uc.
Работа этого двигателя основана на взаимодействии магнитного поля статора с вихревыми токами, наведенными на поверхность полого ротора.
Машины с полым ротором весьма чувствительны к изменениям напряжения сигнала и его продолжительности, что дает возможность применять их в качестве исполнительных двигателей.
5.16. ОДНОФАЗНЫЙ ДВИГАТЕЛЬ С ЯВНО ВЫРАЖЕННЫМИ ПОЛЮСАМИ
Для создания вращающего момента в однофазных асинхронных двигателях иногда применяют конструкцию с явно выраженными полюсами и однофазной обмоткой. Полюса 1 (рис. 5.16.1) имеют расщепленную конструкцию, причем на одну из половинок каждого полюса надет короткозамкнутый виток в виде медного кольца 2. Ротор также короткозамкнутый. При подключении обмотки статора к сети под действием создаваемого ею пульсирующего магнитного потока в витке возникает ток, который препятствует нарастанию потока в этой части полюса.
В результате потоки в обеих частях каждого полюса оказываются сдвинуты по фазе относительно друг друга, что в свою очередь приводит к образованию в двигателе вращающего магнитного поля. Однофазные двигатели применяют в некоторых типах вентиляторов, электропроигрывателях и т.д.
5.17. ИСПОЛЬЗОВАНИЕ ТРЕХФАЗНОГО ДВИГАТЕЛЯ В КАЧЕСТВЕ ОДНОФАЗНОГО
Очень часто задают вопрос, нельзя ли обычный трехфазный двигатель включить в однофазную сеть переменного тока?
Рассуждения в п.5.14., относящиеся к однофазным двигателям, можно отнести к двигателям с трехфазной обмоткой на статоре. На рис. 5.17.1. показаны четыре различные схемы подключения двигателей.
Здесь две статорные обмотки включаются в сеть последовательно, образуя обмотку возбуждения. Третья фазная обмотка является пусковой, поэтому она содержит фазосдвигающий элемент.
Второе обязательное условие для двухфазных двигателей здесь можно выполнить достаточно точно путем правильного подбора конденсатора С.
Первое условие здесь выполнено неточно, т.к. пространственный сдвиг между обмотками составляет не 90°, а 120°.
Вследствие этого, двигатель теряет примерно 50-60% своей номинальной мощности.
5.18. СПЕЦИАЛЬНЫЕ РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН
5.18.1 ОБЩИЕ СВЕДЕНИЯ
В учебной программе по электротехнике для факультета «Экономика, предпринимательство, экономика» отсутствует раздел специальных режимов работы асинхронных машин.
Однако широкое развитие технологии, технического творчества учащихся требует знания ряда дополнительных возможностей использования этих материалов. Рассмотрим лишь некоторые из них.
5.18.2 Индукционные регуляторы и фазорегуляторы
Индукционные регуляторы напряжения представляют собой заторможенный асинхронный двигатель с фазовым ротором. Им можно регулировать напряжение в широких пределах. Статорная и роторная обмотки в регуляторе соединены электрически, но так, чтобы они могли быть смещены относительно друг друга поворотом ротора. При подключении индукционного регулятора к сети вращающийся магнитный поток наводит в обмотках статора и ротора ЭДС E1 и E2. При совпадении осей в обмотках ЭДС E1 и E2 совпадают по фазе, а на выходных зажимах регулятора устанавливается максимальное значение напряжения.
При повороте ротора оси обмоток поворачиваются на некоторый угол a . На такой же угол смещается и вектор E2. При этом напряжение на выходе уменьшается. Поворотом ротора на угол 180° мы устанавливаем на выходе минимальное напряжение.
Фазорегулятор предназначен для изменения фазы вторичного напряжения относительно первичного. При этом величина вторичного напряжения остается неизменной.
Фазорегулятор представляет собой асинхронную машину, заторможенную специальным поворотным устройством. Напряжение подводится к статорной обмотке, а снимается с роторной. В отличие от индукционного регулятора здесь обмотки статора и ротора электрически не соединены. Изменение фазы вторичного напряжения осуществляется поворотом ротора относительно статора.
Применяется в автоматике и измерительной технике.
5.18.3 Асинхронный преобразователь частоты
Как известно, частота тока в цепи ротора асинхронного двигателя зависит от скольжения, т.е. определяется разностью частот вращения ротора и поля статора.
 .
.
Указанное свойство позволяет использовать двигатель в качестве преобразователя частоты (рис. 5.18.3.1). Если обмотку статора подключить к сети промышленной частоты f1, а ротор посредством постороннего двигателя приводится во вращение против поля статора, то скольжение возрастает, а частота тока ротора f2 соответственно увеличивается по сравнению с частотой сети f1 в несколько раз. Если требуется уменьшить частоту тока, то ротор преобразователя надо вращать в направлении вращающегося поля статора.
5.18.4 Электромагнитная асинхронная муфта
Электромагнитная асинхронная муфта (рис. 5.18.4.1) устроена по принципу асинхронного двигателя и служит для соединения двух частей вала. На ведущей части вала 1 помещается полюсная система 2, представляющая собой систему явно выраженных полюсов с катушками возбуждения. Постоянный ток в катушке возбуждения подводится через контактные кольца 4. Ведомая часть муфты 3 исполняется по типу роторной обмотки двигателя.
Принцип работы муфты аналогичен работе асинхронного двигателя, только вращающийся магнитный поток здесь создается механическим вращением полюсной системы. Вращающий момент от ведущей части вала к ведомой передается электромагнитным путем. Разъединение муфты производится отключением тока возбуждения.
Управление электрическим током позволяет осуществлять дистанционное управление муфтой (плавно сцеплять и расщеплять ее). Поэтому ее применяют в автоматике и телемеханике.
5.18.5 Сельсины
Представим себе два асинхронных двигателя с фазным ротором включенным последующей схеме (рис. 5.18.5.1). Обмотки статора С1, С2, С3, называемые обмотками возбуждения, включены в общую сеть трехфазного тока.
Обмотки ротора P1, P2, P3 объединены трехпроводниковой линией связи. Магнитные потоки обмоток возбуждения при q1=q2 наводят в соответствующих обмотках роторов равные и совпадающие по фазе ЭДС.
Если ротор двигателя Д1 повернуть на угол q1, а ротор Д2 оставить на месте (q2=0), то в фазных обмотках ротора двигателя Д2 будет наведена ЭДС E2>E1. В результате в линии связи потечет ток D I от большего потенциала к меньшему.
 ,
,
где 2z — сумма сопротивлений обмоток роторов и линии связи.
Этот ток, пройдя по обмоткам роторов, взаимодействуя с магнитными полями статоров, вызовет образование дополнительных вращающих моментов D M. Поскольку направление момента D М в каждом двигателе будет свое, то в одном из них произойдет поворот ротора вправо (у двигателя Д2), а у другого — влево (у двигателя Д1).
Следовательно, оба двигателя самостоятельно (синхронно) придут в положение ( q 1= q 2). Такая система получила название синхронно-следящей.
Практическое использование эта система получила в многоприводных механизмах (конвейерах, козловых кранах и т.п.).
В автоматике применяются так называемые сельсины. Это маломощные асинхронные машины с однофазным статором и трехфазным ротором.
Сельсины применяются для целей измерения или определения угла, на который повернулся определенный механизм.
В сельсинной передаче всегда используются две машины: сельсин-датчик и сельсин-приемник.
Обмотки возбуждения бывают обычно однофазные и располагаются на явновыраженных полюсах. Число полюсов всегда два. Обмотки синхронизации — трехфазные, размещаются в пазах ротора и оканчиваются тремя контактными кольцами (рис. 5.18.5.2).
В отличие от силовых синхронно-следящих систем, поворот ротора сельсина-датчика осуществляется принудительно, а ротор сельсина-приемника приходит в движение автоматически. Поворот ротора фиксируется индикаторной стрелкой.
При наличии однофазных обмоток возбуждения на статоре поворот ротора сельсина-датчика может осуществляться в любую сторону, т.к. пульсирующее магнитное поле статора обеспечивает для этого необходимые условия.
Помимо приведенного индикаторного режима, сельсины могут работать и в так называемом трансформаторном режиме.
В этом случае сельсин-приемник, не только показывает угол рассогласования q , но и вырабатывает электрический сигнал для управления мощным механизмом
5.18.6 Поворотные трансформаторы
Так называют электрические машины переменного тока, предназначенные для преобразования угла поворота q в напряжение, пропорциональное некоторым функциям угла поворота ротора sin q или cos q , а также самому углу q . Их применяют в вычислительной технике для выполнения различных математических операций. С помощью поворотных трансформаторов решают геометрические задачи, связанные с построением треугольников, преобразованием координат, разложением и построением векторов. В системах автоматического регулирования поворотные трансформаторы используют в качестве измерителей расстояния, фиксирующих отклонение системы от некоторого определенного положения.
Конструктивно поворотный трансформатор представляет собой асинхронную машину малой мощности. На статоре ее перпендикулярно размещены две обмотки: C1-C2 и С3-С4. Первая получила название главной, а вторая — квадратурной. Обмотки статора выполняются одинаковыми, т.е. с одинаковым числом витков. На роторе может быть одна обмотка, но чаще их бывает две. На рис. 5.18.6.1. приведены схемы включения синусного, косинусного и синусно-косинусного поворотных трансформаторов.
Основные уравнения асинхронного двигателя
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора:
 В роторной обмотке аналогичное уравнение будет иметь вид:
В роторной обмотке аналогичное уравнение будет иметь вид:
 Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
 Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 где
где

40. Чтобы векторы ЭДС, напряжений и токов обмоток статора и ротора можно было изобразить на одной векторной диаграмме, следует параметры обмотки ротора привести к обмотке статора, т. е. обмотку ротора с числом фаз m2, обмоточным коэффициентом ko62 и числом витков одной фазной обмоткиω2 заменить обмоткой с m1, ω1 и kоб1. При этом мощности и фазовые сдвиги векторов ЭДС и токов ротора после приведения должны остаться такими же, что и до приведения. Пересчет реальных параметров обмотки ротора на приведенные выполняется по формулам, аналогичным формулам приведения параметров вторичной обмотки трансформатора (см. § 1.6).
При s = 1 приведенная ЭДС ротора
где ke = E1/ E2 =ko61 ω1 /(ko62/ ω2) — коэффициент трансформации напряжения в асинхронной машине при неподвижном роторе. Приведенный ток ротора
В отличие от трансформаторов в асинхронных двигателях коэффициенты трансформации напряжения и тока не равны ( kе ≠ ki ). Объясняется это тем, что число фаз в обмотках статора и ротора в общем случае не одинаково ( m1 ≠ m2 ). Лишь в двигателях с фазным ротором, у которых m1 = m2, эти коэффициенты равны.
Активное и индуктивное приведенные сопротивления обмотки ротора:
Следует обратить внимание на некоторую специфику определения числа фаз m2 и числа витков ω2 для короткозамкнутой обмотки ротора (см. рис. 10.3). Каждый стержень этой обмотки рассматривают как одну фазу, а поэтому число витков одной фазы короткозамкнутой обмотки ротора ω2 = ,0,5; обмоточный коэффициент такой обмотки kоб2 = 1, а число фаз m2 = Z2, т. е. равно числу стержней в короткозамкнутой обмотке ротора.
41. В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:

Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:

Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:

Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Воспользовавшись ранее полученной формулой

запишем выражение полной механической мощности:

т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину механических Рмех и добавочных Рдоб потерь:
Коэффициент полезного действия есть отношение мощности на валу P2 к потребляемой мощности P1:
42. Электромагнитный момент асинхронной машины создается в результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем. Связь между моментом и скоростью вращения ротора можно получить из уравнения механической мощности. Если в него подставить выражение для тока ротора, то с учетом того, что угловая частота вращения равна  ,получим
,получим
Все величины, входящие в это выражение константы, кроме скольжения s. Взяв производную  и приравнивая ее нулю, найдем экстремумы функции
и приравнивая ее нулю, найдем экстремумы функции  . Они наступают при критическом скольжении
. Они наступают при критическом скольжении  . К приближенному равенству для критического скольжения можно перейти с учетом того, что
. К приближенному равенству для критического скольжения можно перейти с учетом того, что  . Подставляя критическое скольжение в выражение , получим значение максимального момента
. Подставляя критическое скольжение в выражение , получим значение максимального момента
 . Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
. Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
Из выражения для  следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая
следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая  также, как это было сделано для
также, как это было сделано для  , мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
, мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
 .
.
Полагая  в выражении , получим выражение для пускового момента асинхронного двигателя
в выражении , получим выражение для пускового момента асинхронного двигателя
 Полученная зависимость представлена на рисунке. Точка
Полученная зависимость представлена на рисунке. Точка  соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка
соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка  соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от
соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от  до
до  , т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется «опрокидыванием» двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
, т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется «опрокидыванием» двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
Номинальный режим работы двигателя соответствует скольжению  . Отношение
. Отношение  называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
Если за счет внешнего вращающего момента вал двигателя раскручивается до скорости выше синхронной  , то скольжение становится отрицательным и машина переходит в генераторный режим.
, то скольжение становится отрицательным и машина переходит в генераторный режим.
При скольжениях  скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
На рисунке для наглядности критическое скольжение составляет около 0,5. Такие значения в реальных машинах нормального исполнения не бывают. Они находятся в пределах от 0,1 до 0,02, причем меньшие значения соответствуют машинам большей мощности. Поэтому рабочий участок характеристики практически линейный и может быть заменен прямой  .
.
Выражение не позволяет анализировать свойства характеристики в общем виде. Однако, если его разделить на , то получится удобное выражение в относительных единицах, называемое по имени автора формулой Клосса
 .
.
 В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.
В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.  . Эту характеристику легко можно получить из характеристики , если учесть, что
. Эту характеристику легко можно получить из характеристики , если учесть, что  , т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости
, т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости  , а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
, а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
Линеаризованная механическая характеристика рабочего участка примет вид
43. Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
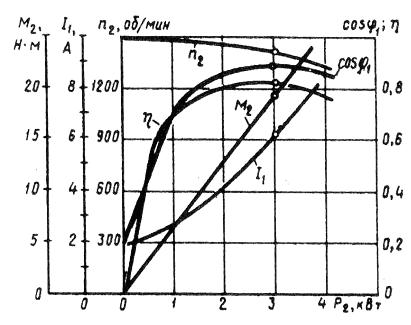
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
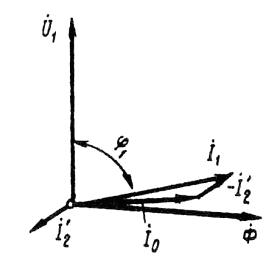
Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода.Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
44. Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.

Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 — 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
45. Для пуска асинхронного двигателя с короткозамкнутым ротором применяются следующие способы:
· пуск при пониженном напряжении питания.
40.2.1. Прямое включение
Прямое включениеасинхронного двигателя в сеть является наиболее простым способом пуска двигателя. В то же время в этом случае обмотки статора и ротора двигателя обтекаются большим пусковым током (током КЗ), равным 4—7-кратному значению номинального. Поэтому очень важно, чтобы время пуска двигателя было при этом как можно меньшим. Такой метод пуска применяется для небольших двигателей, или для двигателей, приводящих во вращение небольшие механические нагрузки.
40.2.2. Пуск при пониженном, напряжении
Пуск при пониженном напряжении питания осуществляется обычно в тех случаях, когда прямой пуск не допускается по условиям работы сети.
Обычно применяют один из четырех способов пуска при пониженном напряжении:
- двигателя через понижающий автотрансформатор;
- переключение обмотки статора со звезды на треугольник;
- включение двигателя через полупроводниковый регулятор напряжения.
Во всех этих случаях снижение напряжения ведет не только к пропорциональному уменьшению пускового тока (положительный эффект), но и к резкому (квадратичному) уменьшению пускового момента (отрицательный эффект).
а) Пуск асинхронного двигателя через автотрасформатор
На рис.40.1. показана схема пуска асинхронного двигателя через автотрансформатор.
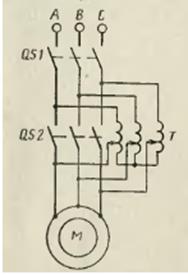
Рис.40.1. Пуск асинхронного двигателя с помощью автотрансформатора
Уменьшения напряжения при пуске можно достигать включением между сетью и двигателем понижающего автотрансформатора Т(рис. 40.1). При пуске сначала замыкают рубильник QS1,и пониженное напряжение попадает на обмотки двигателя. По достижении ротором достаточной частоты вращения замыкают рубильник OS2,шунтируя автотрансформатор так, что полное напряжение сети попадает на обмотки двигателя.
б) Пуск с переключением обмоток статора со звезды на треугольник
К способам пуска с понижением напряжения можно отнести также пуск с переключением обмоток статора со звезды на треугольник (рис. 40.2).

Рис.40.2. Схема пуска двигателя с переключением обмоток со звезды на треугольник
В режиме пуска переключатель QSнаходится в положении  , причем обмотка статора включена по схеме звезды. После того как ротор достигнет установившейся частоты вращения, переключатель необходимо перевести в положение
, причем обмотка статора включена по схеме звезды. После того как ротор достигнет установившейся частоты вращения, переключатель необходимо перевести в положение  и обмотки статора будут включены по схеме треугольника.
и обмотки статора будут включены по схеме треугольника.
При данном способе пуска фактически снижается напряжение, подводимое к каждой фазе двигателя, поскольку при одинаковом напряжении сети фазное напряжение в схеме звезды в  раз меньше, чем в схеме треугольника. Пусковой ток в сети при соединении обмотки статора и звезду снижается в раза по сравнению с пусковым током при соединении в треугольник. Однако пусковой момент, пропорциональный квадрату напряжения, снижается в 3 раза.
раз меньше, чем в схеме треугольника. Пусковой ток в сети при соединении обмотки статора и звезду снижается в раза по сравнению с пусковым током при соединении в треугольник. Однако пусковой момент, пропорциональный квадрату напряжения, снижается в 3 раза.
46. Частота вращения асинхронного двигателя
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
 Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения.Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
 Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
 Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
 Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
47. Конденсаторные двигатели — разновидность асинхронных двигателей, в обмотки которого включены конденсаторы для создания сдвига фазы тока.[1] Подключаются в однофазную сеть посредством специальных схем. По количеству фаз статора делятся на двухфазные и трехфазные.
Существует разные схемы подключения, больше вариантов для трёхфазных двигателей, различающиеся способом соединения обмоток двигателя и составом дополнительных элементов, но минимальная работоспособная схема содержит один конденсатор, от чего и происходит название.
Как правило, одна из обмоток («фаза двигателя») запитывается напрямую от однофазной сети, а другие обмотки запитывается через электрический конденсатор, который сдвигает фазу подводимого тока почти на +90°, или через катушку индуктивности, которая сдвигает фазу почти на −90°. Чтобы результирующее вращающееся магнитное поле не было эллиптическим, последовательно с конденсатором включается переменный проволочный резистор, с помощью которого добиваются кругового вращающегося магнитного поля.
Однофа́зный дви́гатель — электродвигатель, конструктивно предназначенный для подключения к однофазной сети переменного тока. Фактически является двухфазным, но вследствие того, что рабочей является только одна обмотка, двигатель называют однофазным.
48. Большинство синхронных машин имеет электромагнитное возбуждение. Источниками постоянного тока для обмоток возбуждения являются специальные системы возбуждения, к которым предъявляется ряд важных требований:
1) надежное и устойчивое регулирование тока возбуждения в любых режимах работы машины;
2) достаточное быстродействие, для чего применяется форсировка возбуждения, т. е. быстрое увеличение напряжения возбуждения до предельного значения, называемого потолочным. Форсировка возбуждения применяется для поддержания устойчивой работы машины во время аварий и в процессе ликвидации их последствий. Потолочное напряжение возбуждения выбирают не менее 1,8-2 номинального напряжения возбуждения. Скорость нарастания напряжения при форсировке возбуждения должна быть не менее 1,5-2 номинальных напряжений на контактных кольцах ротора в секунду;
3) быстрое гашение магнитного поля, т. е. уменьшение тока возбуждения машины до нуля без значительного повышения напряжения на ее обхмотках. Необходимость в гашении поля возникает при отключении генератора или повреждении в нем.
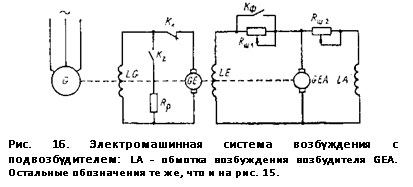
Для возбуждения синхронных машин применяется несколько систем. Простейшей из них является электромашинная система возбуждения с возбудителем постоянного тока (рис. 15). В этой системе в качестве источника используют специальный генератор постоянного тока GE, называемый возбудителем; он приводится во вращение от вала синхронного генератора, а его мощность составляет 1- 3 % мощности синхронного генератора. Ток возбуждения синхронной машины Iв относительно велик и составляет несколько сотен и даже тысяч ампер. Поэтому его регулируют с помощью реостатов, установленных в цепи возбуждения возбудителя. Возбуждение возбудителя осуществляют по схеме самовозбуждения (рис. 15) или независимого возбуждения от специального генератора постоянного тока GEA, называемого подвозбудителем (рис. 16). Подвозбудитель работает с самовозбуждением, и сопротивление резистора Rш2при работе генератора не изменяется.

49. Метод асинхронного пуска. Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т. е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле, которое, взаимодействуя с током Iпв пусковой обмотке (рис. 6.48, а), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм.
Применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 6.48, б,обмотку возбуждения сначала замыкают на гасящий резистор, сопротивление которого Rдоб превышает в 8 — 12 раз активное сопротивление Rв обмотки возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s ≈ 0,05), обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), вследствие чего ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней вращающимся магнитным полем индуцируется ЭДС Ев = 4,44f2wвФm = 4,4f1swвФm , где f2 = f1s — частота изменения тока в обмотке возбуждения; wв — число витков обмотки возбуждения; Фm — амплитуда магнитного потока вращающегося поля.
В начальный момент пуска при s = 1 из-за большого числа витков обмотки возбуждения ЭДС Ев может достигать весьма большого значения и вызвать пробой изоляции. При схеме, изображенной на рис. 6.48, в, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением Rв весьма мало, поэтому эту обмотку в режиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до
s = 0,3 ÷ 0,4 возбудитель возбуждается и в обмотку возбуждения подается постоянный ток, обеспечивающий при s ≈ 0,05 втягивание ротора в синхронизм. Различие пусковых схем обусловлено тем, что не во всех случаях может быть применена более простая схема с постоянно подключенной к возбудителю обмоткой возбуждения (рис. 6.48, в), так как она имеет худшие пусковые характеристики, чем более сложная схема, приведенная на рис. 6.48,б. Главной причиной ухудшения пусковых характеристик является возникновение одноосного эффекта — влияние тока, индуцируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
50. Под реакцией якоря в синхронных машинах понимают воздействие магнитного поля статора (якоря) на магнитное поле ротора. Реакция якоря оказывает сильное влияние на все электромагнитные процессы в машине. Явление реакции по определению связано с магнитным полем статора, поэтому характер и степень влияния реакции определяется током статора, т.е. нагрузкой машины.
 Рассмотрим этот процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле ротора вектором
Рассмотрим этот процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле ротора вектором  . При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС
. При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС  , отстающую от потока на
, отстающую от потока на  . Ток статора
. Ток статора  создает магнитный поток статора
создает магнитный поток статора  , совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС в пределах
, совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС в пределах  .
.
При чисто активной нагрузке (R) ток и магнитный поток статора совпадают по фазе с и результирующий магнитный поток машины  оказывается смещенным относительно потока ротора на некоторый угол в сторону запаздывания. В результате смещения потока магнитное поле ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими. Несмотря на то, что в результате смещения сбегающие края полюсов подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и деформируется.
оказывается смещенным относительно потока ротора на некоторый угол в сторону запаздывания. В результате смещения потока магнитное поле ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими. Несмотря на то, что в результате смещения сбегающие края полюсов подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и деформируется.
При чисто индуктивной нагрузке (L) ток статора и магнитный поток отстают от ЭДС на . Поток статора оказывается направленным встречно по отношению к потоку ротора и сильно размагничивает машину. Однако, в отличие от активной нагрузки, искажения поля за счет смещения потока не происходит.
При чисто емкостной нагрузке (C) ток статора и магнитный поток опережают ЭДС на и поле в машине усиливается потоком реакции, направленным согласно с потоком ротора. Искажения поля в этом случае также не происходит, а усиление поля вследствие насыщения оказывается выраженным слабо.
В случае активно-реактивной нагрузки (RL и RC) поток статора оказывается смещенным на угол меньший, чем , в сторону запаздывания или опережения. В этом случае магнитный поток статора , можно разложить на продольную  и поперечную
и поперечную  составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке.
составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке.
Таким образом реакция якоря в синхронной машине изменяет величину и направление магнитного потока, в отличие от асинхронной машины, у которой  . Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
. Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
Магнитный поток вызывает искажение магнитного поля ротора, которое проявляется в статоре в виде ЭДС  . Так как поток линейно связан с током статора
. Так как поток линейно связан с током статора  , то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде
, то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде  .
.
Асинхронный двигатель
Асинхронный двигатель – электрическая машина, работающая в двигательном режиме, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит также от нагрузки. Основа работы электродвигателя – преобразование электрической энергии в механическую. Трехфазный асинхронный электродвигатель был разработан и впервые создан в 1889 году русским ученым-электротехником М.О. Доливо-Добровольским. Совместно с разработкой двигателя Михаил Осипович разработал и осуществил впервые в мире в 1891 году систему передачи трехфазного тока на расстояние.
Строение асинхронного двигателя
Для того, чтобы разобраться в теории работы двигателя, нам надо рассмотреть из чего же он состоит.

- Крышка клеммной коробки.
- Клеммная коробка.
- Стяжные болты корпуса.
- Вал ротора.
- Передняя крышка корпуса.
- Опорная плита корпуса.
- Корпус с ребрами охлаждения.
- Информационная табличка завода-изготовителя («шильдик»).
- Задняя крышка корпуса.
- Дополнительный вентилятор охлаждения двигателя («вертушка»). «Вертушка» устанавливается не на все двигатели. Если предполагаемое место работы обеспечивает хорошее воздушное охлаждение, то потребности в дополнительном обдуве не требуются.
На самом же деле асинхронный двигатель состоит из трех частей (слева-направо): ротора, статора и корпуса, но главными частями считаются именно ротор и статор, о которых мы с вами и поговорим.

Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.

Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы

в которые укладывается изоляция

Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора

Асинхронный двигатель имеет три «куска» медного провода

Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.

Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.

Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Реальное фото статора одного из асинхронного двигателя выглядит вот так.

Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.

Самая главная часть — это вал. Иначе, как бы происходило вращение?

На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.

Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.


Как вы можете далее заметить, в сердечнике ротора есть специальные пазы

В них вставляются медные или алюминиевые стержни,

которые замыкаются на кольцо с обеих сторон, образуя так называемую «беличью клетку».

В общем виде полностью собранный ротор асинхронного двигателя выглядит вот так.

А вот так он выглядит в реальном двигателе.

Всегда помните, что в асинхронном двигателе вращается ротор, а не статор. Статор — это неподвижная часть, а ротор — подвижная часть электродвигателя. В рабочем состоянии двигателя между ротором и статором всегда имеется воздушный зазор. При работе двигателя ротор ни в коем случае не должен задевать статор двигателя.

Информационная табличка на двигателе (шильдик)
Полную и достоверную информацию о двигателе можно узнать, если уметь «читать» шильдик. Точнее то, что на нем написано. Начнем описание шильдика рассматриваемого двигателя сверху вниз.

- Название двигателя. Значок слева – эмблема завода-изготовителя, справа – знак качества СССР.
- Слева: тип двигателя – в этом наборе букв и цифр кодировалась технологическая информация. В кодировку могли включить данные о: количестве катушек в одной обмотке; количество витков провода в одной катушке; скольким числом проводов намотаны катушки; тип лака, примененного для пропитки и т.д. Справа: заводской номер двигателя.
- Слева направо: количество рабочих фаз; частота рабочего напряжения (Гц); мощность двигателя (W); cos φ – коэффициент мощности тока (параметр показывает, какое количество тока, взятого из сети, используется по назначению). Чем больше мощность, тем выше этот параметр.
- Число оборотов в минуту вала двигателя; характеристики статора – по каким схемам можно соединять обмотки (треугольник или звезда); величина(ы) рабочего напряжения.
- Ток, потребляемый двигателем, соответствующий каждой схеме соединения обмоток (в данном случае — 2,3 А при соединении «треугольником» и 1,33 А – «звездой»); коэффициент полезного действия (КПД), степень пыле- влагозащиты (IP44).
- ГОСТ СССР, по которому сделан двигатель; класс изоляции, режим S1. Режим S1 означает, что это постоянный режим работы. В таком режиме двигатель может оставаться включенным в работу на длительное время.
- Страна-производитель двигателя.
Способы подключения асинхронного двигателя
Как мы уже с вами узнали, асинхронный двигатель имеет три обмотки. На современный манер они обозначаются английскими буквами U,V,W. Начало каждой обмотки обозначается цифрой «1», а конец обмотки цифрой «2».

Поэтому, есть два способа соединения обмоток: звездой и треугольником.
Способ соединения «звезда»
Способ «звезда» подразумевает соединение одинаковых выводов обмоток (начала или концы обмоток) в одну (нулевую) точку.

В клеммной коробке двигателя это соединение будет иметь такой вид.

Как вы видите, в этом случае с помощью железных пластин мы закоротили концы обмоток в одну общую точку.
Соединение таким способом практикуется, в основном, на двигателях промышленного назначения. Часто завод-изготовитель, для таких двигателей, которые не будут реализовываться через розничную сеть, производит соединение «звездой» уже внутри статора. На корпус двигателя выводится не 6 клемм, а 3. В этом случае достаточно просто подать трехфазное напряжение. Поэтому, помните: если вы увидите, что у асинхронного двигателя только 3 провода, это значит, что его обмотки уже соединены по типу «звезда».
Способ соединения «треугольник»
Соединение «треугольник» выполняется по схеме: конец первой обмотки соединяется с началом второй, конец второй – с началом третьей, а конец третьей – с началом первой. В места соединения подается питающее трехфазное напряжение.

В двигателе это будет выглядеть вот таким образом.


Восстановление маркировки обмоток
Если точнее, маркировка обмоток нужна только для определения направления намотки катушек обмотки. Конец и начало обмотки обозначают только с этой целью. Дело в том, что при включении обмотки в работу в ней начинают возникать вихревые токи, которые движутся по направлению «от начала к концу». Если обмотки включить по принципу «начало с началом, конец с концом», то токи суммируются, обмотки превратятся в один большой резистор и возникнет огромный суммарный ток. Двигатель начнет сильно гудеть и не будет вращаться. Очень быстро начнут нагреваться обмотки, и двигатель сгорит. Причем, вполне возможно, вспыхнет настоящее пламя оранжево-синего цвета с очень вредным и неприятным запахом.
Существует способ определения концов и начал обмоток.
Весь этот процесс очень хорошо показан на видео. Автор этого видео использовал для проверки сетевое напряжения в 220 Вольт, что я крайне не рекомендую делать. Используйте понижающие трансформаторы, либо автотрансформатор.
Подключение асинхронного двигателя к трехфазной сети
Остановимся более подробно на подключении двигателя. Завод-производитель, как правило, маркирует не только клеммы в клеммной коробке, но и концы проводов. В реальности это либо алюминиевые скобки, либо пластиковые или картонные бирки с номером провода. Обмотки в современных двигателях указывается, как U, V, W. Начало обмоток цифрой «1», а конец — цифрой «2». Как вы уже знаете, асинхронный двигатель может быть включен по схеме «звезда», а также по схеме «треугольник». В 90% случаев используется именно подключение «звезда».
Итак, у нас обмотки двигателя соединены по схеме «звезда». Куда же нам подать напряжение, чтобы двигатель начал свое вращение?
Оказывается, все просто. Так как в трехфазной сети у нас в основном 4 провода ( Фаза A, Фаза B, Фаза C, Земля), то соответственно, мы должны задействовать все 4 провода.

Есть также небольшой нюанс при подключении асинхронного двигателя к трехфазной сети. Допустим, если мы подключили двигатель по схеме выше, то у нас вал будет вращаться в одну сторону, допустим, по часовой стрелке.

Но если мы поменяем две любые фазы местами, то двигатель начнется вращаться в противоположном направлении. Такой эффект называется реверсивным включением асинхронного двигателя.

Все то же самое касается и при подключении асинхронного двигателя по схеме «треугольник». Имейте ввиду, что при включении двигателя в этом режим, мы на шильдике должны посмотреть допустимое напряжение, на которое рассчитан этот двигатель по схеме соединения «треугольник». Если по схеме «звезда» мы можем подать на такой двигатель питание 380 Вольт, то по схеме «треугольник» только 220 Вольт.


Подключение асинхронного двигателя к однофазной сети
Обратимся к конструкции трехфазного асинхронного двигателя. Как мы знаем, рабочих фаз двигателя – 3, и клемм для их подключения тоже 3. А в однофазной бытовой сети 220 Вольт проводов всего два – фаза и ноль. Что подключить на третью клемму двигателя? Если на нее подключить ответвление от любого из этих двух проводов, то мы получим просто короткое замыкание со всеми вытекающими последствиями.
Выходом является подключение такого ответвления через конденсатор. Слово «конденсатор» переводится на русский язык как «накопитель». Как известно, работает он по принципу «заряд-разряд». То есть, включенный в сеть конденсатор, какое-то время накапливает заряд, а потом, разряжаясь, отдает его обратно в сеть. Времени, в течение которого конденсатор накапливает заряд, вполне достаточно для того, чтобы фаза, от которой он питается, «ушла» вперед, сдвинулась по времени. Сдвинувшись, фаза как бы «освобождает место» для того разряда, который выдаст конденсатор, и исключает возможность «короткого» замыкания. Из-за того, что своей работой конденсатор «сдвигает» фазы, он называется фазосдвигающим. Более подробно про работу конденсатора в цепи переменного тока можно прочитать в этой статье. Таким образом, создается третий провод необходимый для подключения двигателя.
Схемы подключения к однофазной сети
Здесь все достаточно просто. Мы должны соединить конденсатор между двумя фазами. В схеме со звездой это будет выглядеть вот так.

Для того, чтобы поменять вращение двигателя, нам надо просто поменять местами фазу (L) и ноль (N) местами.

Ну и все то же самое касается и со схемой подключения «треугольник».


Как выбрать конденсатор
При подборе конденсатора нужно помнить, что у него есть две характеристики: напряжение, на которое он рассчитан, и его электрическая емкость. Правило подбора напряжения можно выразить простыми словами: рабочее напряжение конденсатора, указанное на его корпусе должно быть больше рабочего напряжения сети, в которую включается двигатель . Более точно это правило выражается формулой:

Вполне может быть так, что полученное значение окажется промежуточным. То есть таким, на которое конденсаторы не выпускаются. Например, для сети 220 В, по формуле получится 311,13 В. На такое напряжение конденсаторы не выпускались. Тогда конденсатор подбирается на ближайшее значение в большую сторону. В нашем случае можно взять конденсатор на 380 Вольт и больше.
Расчет емкости конденсатора
Расчет емкости конденсатора производится по формуле, в которой учитывается схема соединения обмоток двигателя. Дело в том, что при расчете емкости учитывается не только рабочее напряжение сети, но и ток, протекающий по обмоткам двигателя. Большую роль играет и тот факт, что во время запуска двигателя, в обмотках возникает так называемый пусковой ток, который намного больше рабочего тока двигателя. А так как рабочий ток двигателя зависит от схемы включения обмоток, то естественно, и пусковой ток будет тоже зависеть от этой схемы.
Итак, формула расчета конденсатора:

С – искомая емкость конденсатор, мкФ
К – коэффициент, зависящий от схемы подключения обмоток
IН – номинальный ток двигателя, Амперы
U – напряжение сети, Вольты
Коэффициент К будет равен 4800 при соединении обмоток «треугольником», и 2800 – при соединении «звездой». В качестве примера, можно рассчитать емкость для рассматриваемого здесь двигателя, взяв необходимые данные с его шильдика.
Соединение «треугольник»: С = 2,3 × 4800/220 = 50,2. Полученное значение оказалось дробным, поэтому округлим его до целого в большую сторону. Итак, нам нужен конденсатор емкостью 51 мкФ на напряжение 380 В.
Выбор типа конденсатора
Конденсатор, емкость и рабочее напряжение, которого мы определили, должен быть подходящего типа. Как известно, конденсаторы разделяются на два типа: полярные и неполярные. Полярные имеют обозначение «+» и «-» на выводах и применяются в цепях постоянного тока. Неполярные обозначений на выводах не имеют и работают в любых цепях. Кроме того, по способу изготовления они разделяются на электролитические и не электролитические. Электролитические конденсаторы применяются в основном, в радиотехнике и электронике, и чаще всего, бывают полярными. Они в качестве фазосдвигающих не годятся, даже если подходят по емкости и напряжению. Лучшие конденсаторы для работы с двигателями – металлобумажные. Это один из видов неполярных конденсаторов. Пригодные марки – МБГЧ, МБН, К42-19.
Итак, конденсатор подобран и подключен, обмотки собраны правильно, провода присоединены к клеммам – включаем двигатель в сеть и понимаем, что он не развивает ту мощность, которая указана на шильдике. Это – нормально. Таковы законы индуктивности и электродинамики – об этом нужно помнить. Трехфазный двигатель, подключенный к однофазной сети через конденсатор, развивает не более 60-65% от номинальной мощности.
Теория и подключение пускового конденсатора
Выше по тексту, уже было сказано, что во время запуска двигателя возникает пусковой ток, намного превышающий рабочий ток двигателя. Поэтому, если мы оставим только рассчитанный нами конденсатор, мы не учтем наличие пускового тока. Двигатель будет трогаться очень медленно, наращивая обороты понемногу.
Для устранения этого эффекта, параллельно рабочему конденсатору подключают пусковой конденсатор. Все его характеристики должны были быть такими же, как у рабочего конденсатора, кроме емкости. Его емкость равна емкости рабочего конденсатора, умноженной на 2,5.
Подключается пусковой конденсатор параллельно рабочему. Время его включения – краткосрочное, только до того момента, когда двигатель наберет стабильные обороты. Как правило, подключают пусковой конденсатор через кнопку без фиксации. То есть, пока кнопку удерживают в нажатом состоянии, пусковой конденсатор подключен к клеммам двигателя.
Как проверить двигатель перед запуском
Перед тем, как запустить асинхронный двигатель в работу, желательно его проверить на работоспособность. С чего же начать?
Внешний осмотр двигателя. Проверьте, нет ли сколов, вмятин, покрутите вал двигателя. Он должен крутиться плавно и без рывков в обе стороны. Этим действием вы проверяете подшипники, на которых держится ротор двигателя. Если вал двигателя подклинивает, то на это могут быть несколько причин: разбиты посадочные места под подшипники, убитые подшипники, либо ротор затирает статор. Для того, чтобы выяснить причину, нужно будет полностью разобрать двигатель и выяснить реальную проблему. Если все ок, то двигаемся к следующему шагу.
Проверяем обмотки двигателя. Для этого берем мультиметр, ставим его на измерение сопротивления и проверяем сопротивление обмоток. Если обмотки подключены по схеме «звезда», то нам будет достаточно замерять сопротивление между клеммами, куда подается напряжение питания. Делается это в три этапа.



Во всех трех случаях сопротивление должно быть одинаково. Допускается отклонение в несколько Ом.
Этими тремя действиями мы проверили обмотки нашего двигателя и убедились, что они все целые.
И заключительный шаг. Проверяем, не звонятся ли обмотки на землю. Так как все обмотки так или иначе соединяются между собой, достаточно будет встать щупом мультиметра на любую из обмоток, а вторым щупом встать на корпус двигателя. Переключатель на мультиметре поставить на измерение МОм.

В идеале должно получиться бесконечно большое сопротивление, в реале от 100 МОм и выше. Если сопротивление очень маленькое, что то около 1-10 Ом, то это означает, что какая-то из обмоток двигателя звонится на землю, что категорически недопустимо. На практике если же сопротивление меньше 1 МОм, то надо выяснить причину и устранить ее. Скорее всего в двигатель попала влага, грязь, либо произошел пробой диэлектрика медного провода. В этом случае поможет только полная разборка и визуальное выяснение причины.
Все те же самые операции применяются и к двигателю со схемой подключения «треугольник».
Большинство материала для статьи «асинхронный двигатель» было взято из видео ниже. Обязательно к просмотру.
http://poisk-ru.ru/s455t4.html
http://www.ruselectronic.com/induction-motor/