Уравнение движения и его анализ.
Для анализа движения ротора или движения якоря используют основной закон динамики, который говорит о том, что для вращения тела векторная сумма моментов, действующая относительно оси вращения, равна производной момента количества движения.
В электроприводе составляющими результативного момента является момент двигателя и момент сопротивления. Оба момента могут быть направлены как в сторону движения ротора двигателя, так и против него. Чаще всего в электроприводе используют двигательный режим работы. Электрические машины при этом моменте сопротивления имеют тормозной характер по отношению к ротору и направлены на встречу момента двигателя. Поэтому за положительное направление момента сопротивления принимают направление противоположное направлению положительного момента двигателя. В результате уравнение движения записывается так:

В этом выражении оба момента являются алгебраическими величинами, поскольку они действуют относительно одной и той же оси.
Направление динамического момента всегда совпадает с направлением ускорения dw/dt. Последнее выражение справедливо для постоянного радиуса инерции вращения массы.
В зависимости от знака динамического момента различают следующие работы привода:
1. Мдин>0, dw/dt>0, w>0 – разбег или торможение при w 0, dw/dt>0, w>0 – торможение, при w
Дата добавления: 2016-02-09 ; просмотров: 1120 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Основное уравнение движения и его анализ
Воропаев Е.Г.
Электротехника

 |  |  |
8.1.ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ

Oпределение: Электропривод предназначен для приведения в движение различных машин и механизмов. Он состоят из электрического двигателя, аппаратуры управления и передаточных звеньев от двигателя к рабочей машине. Привод бывает групповым, индивидуальным и многодвигательным.
В первом случае один двигатель приводит в движение несколько машин, а во втором каждая машина снабжена своим двигателем.
Многодвигательный привод — это группа двигателей одной машины, где каждый двигатель приводит в движение отдельный механизм.
Из основных требований, предъявляемых к электроприводу, следует отметить следующие:
1. Электродвигатель должен обладать такой мощностью, чтобы он передавал не только статическую нагрузку, но и кратковременные перегрузки.
2. Аппаратура управления должна обеспечить все требования производственного процесса машины, включая регулирование частоты вращения, реверсирование и др.
8.2.УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
При работе электропривода вращающий момент электродвигателя должен уравновешивать статический момент сопротивления рабочей машины, а также динамиче-ский момент, обусловленный инерцией движущихся масс. Уравнение моментов электропривода можно записать в виде:

где М — вращающий момент электродвигателя;
Мс — статический момент сопротивления;
Мдин — динамический момент.
Динамический или инерционный момент, как известно из механики, равен:

где j — момент инерции движущихся масс, приведенный к валу двигателя, кг/м 2 ;
w — угловая частота вращения вала двигателя, с -1 .
Выражая угловую частоту вращения w через число оборотов n, получим:

Уравнение моментов электропривода можно записать в другом виде:

Если n = const, то Мдин = 0, тогда М = Мс.
8.3.ВЫБОР МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
От правильного выбора мощности электродвигателя зависят технико-экономические показатели электропривода (себестоимость, габариты, экономичность, надежность в эксплуатации и др.).
Если нагрузка на электродвигатель стабильная, то определение его мощности ограничивается лишь выбором по каталогу:

где Рн — мощность выбираемого двигателя,
Рнагр — мощность нагрузки.
Если же нагрузка на электродвигатель переменная, то необходимо иметь график нагрузки I = f(t).
Плавную кривую заменяют ступенчатой линией, полагая, что за время t1 в двигателе течет ток I1, за время t2 — ток I2 и. т.д. (рис. 8.3.1 ).

Изменяющийся ток заменяют эквивалентным ему током Iэ, который за время одного цикла работы tц производит одинаковое, тепловое действие с током, изменяющимся ступенями. Тогда:

а эквивалентный ток
Номинальный ток электродвигателя должен быть равным или больше эквивалентного, т.е. 
Поскольку почти у всех двигателей вращающий момент прямо пропорционален току нагрузки М
Iн, то можно записать и выражение для эквивалентного вращающего момента:

Учитывая, что мощность Р = М w , электродвигатель можно выбирать также по эквивалентной мощности:

При повторно-кратковременном режиме двигатель за период работы не успевает нагреться до установившейся температуры, а за время перерыва в работе не охлаждается до температуры окружающей среды (рис. 8.3.2 ).

Для этого режима вводится понятие относительной продолжительности включения (ПВ). Она равна отношению суммы рабочего времени ко времени цикла tц, со-стоящего из времени работы и времени паузы tо:

Чем больше ПВ, тем меньше номинальная мощность при, равных габаритах. Следовательно, двигатель, рассчитанный на работу в течение 25% времени цикла при номинальной мощности, нельзя оставлять под нагрузкой 60% времени цикла при той же мощности. Электродвигатели строятся для стандартных ПВ — 15, 25, 40, 60%, причем ПВ — 25%; принимается за номинальную. Двигатель рассчитывается на повторно кратковременный режим, если продолжительность цикла не превышает 10 мин. Если расчетные значения ПВ отличаются от стандартных, то при выборе мощности двигателя Рэ следует вносить поправку:

8.4.ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ И ЭЛЕМЕНТЫ
Самым простым и распространенным аппаратом для включения и отключения электрических цепей является рубильник.
Разновидностью рубильника является переключатель, способный перекоммутировать схему, например, при реверсировании или переключении обмоток двигателя со «звезды» на «треугольник».
Рубильник состоит из контактного ножа и двух губок, смонтированных на изолированном основании. Одна из губок является шарнирной. По количеству контактных ножей рубильники бывают одно-, двух- и трёхполюсными. Управление рубильником осуществляется изолированной ручкой, объединяющей контактные ножи.
Иногда при управлении, электродвигателями или другими исполнительными механизмами используются пакетные выключатели. Это малогабаритный отключающий аппарат, как правило, круглой формы (рис. 8.4.1.). В неподвижные кольца 5 из изоляционного материала вмонтированы контакты 3. Внутри колец размещаются подвижные диски 8 с контактными пластинами, закрепленными на оси 7. В крышке 6 помещено пружинное приспособление, с помощью которого достигается быстрое замыкание и размыкание контактов, независимо от скорости поворота ручки 1.
Выключатель собирается и крепится к крышке с помощью скобы 4 и шпилек 2.
Для управления двигателями с фазным ротором требуется большое число переключений, необходимых для ввода или вывода дополнительных сопротивлений.

Эту операцию выполняют контроллеры, которые различают на барабанные и кулачковые (рис. 8.4.2 ).
Подвижные контакты барабанного контроллера, имеющие форму сегментов 4, крепятся на валу 5. Неподвижные контакты 3 размещаются на вертикальной рейке 2 и к ним присоединяются внешние цепи. Контактные сегменты соединяются друг с другом по определенной схеме, и, кроме того, они имеют разную длину дуги.
При повороте вала контроллера сегменты поочередно входят в соприкосновение с неподвижными контактами, и осуществляется включение или отключение цепи.

Вал контроллера снабжается фиксатором 1, обеспечивающим ему несколько фиксированных положений.
Кулачковые контроллеры совершеннее барабанных. На валу 5 крепятся диски фасонного профиля 6, которые воздействуют своей боковой поверхностью на ролик контактного рычага 7, определяя тем самым замкнутое или разомкнутое положение контактов 4 и 3.
Переключения в силовых цепях с помощью контроллеров требует от оператора значительных физических усилий. Поэтому в установках с частыми переключениями для этой цели используются контакторы.
Принцип действия их основан на использовании в управлении силовыми контактами электромагнитной системы. Конструкция контактора приведена на рис. 8.4.3.

На изолированной плите 1 жестко укреплен неподвижный силовой контакт 2. На рычаге 3 шарнирно прикрепленном к плите имеется подвижный силовой контакт 4.
Для управления силовыми контактами на плите смонтирована магнитная система, состоящая из сердечника 5 с катушкой 6 и якоря 7, прикрепленного к рычагу 3. Токоподвод к подвижному контакту осуществляется гибким проводником 8.
При подключении к сети катушки 6 произойдет магнитное притяжение сердечником 5 якоря 7 и замыкание силовых контактов 2 и 4. Для разрыва силовой цепи отключают катушку 6, и якорь под собственным весом отпадает от сердечника.
Помимо силовых контактов, в аппарате имеется ряд блокировочных 9, назначение которых будет показано ниже.
Электрическая цепь катушки электромагнита является вспомогательной или управляющей.
Для управления его применяются кнопки управления. Кнопки бывают одноцепные и двухцепные с замыкающими и размыкающими контактами. В большинстве случаев кнопки делаются с самовозвратом, т.е. при снятии механического давления их контакты возвращаются в исходное положение. На рис. 8.4.4 показана конструкция кнопки с двумя парами контактов: замыкающими и размыкающими.

Для защиты электродвигателя от перегрузки в контактор монтируются два тепловых реле (на две фазы). В этом случае контактор называется магнитным пускателем.
Основной деталью теплового реле (рис. 8.4.5) является биметаллическая пластинка 1, состоящая из двух сплавов с различными коэффициентами расширения.

Пластинка одним концом жестко прикреплена к основанию прибора, а другим упирается в защелку 2, которая под действием пружины 3 стремится повернуться против часовой стрелки. Рядом с биметаллической пластинкой помещается нагреватель 4, включаемый последовательно с двигателем. Когда по силовой цепи потечет большой ток, то температура нагревателя повысится. Биметаллическая пластина прогнется кверху и освободит защелку 2. Под действием пружины 3 защелка поворачивается и через изоляционную пластину 5 размыкает контакты 6 в цепи управления пускателем. Возврат реле возможен только после остывании пластины 1. Он осуществляется нажатием кнопки 7.
Для защиты электроустановок от перегрузок используются также плавкие предохранители. Это неуправляемый аппарат, в котором перегрузка вызывает перегорание плавной вставки, изготовленной из легкоплавкого материала. Предохранители бывает пробчатыми и трубчатыми (рис. 8. 4.6).

Существуют также и управляемые аппараты, защищающие электрооборудование от перегрузок. К ним относится реле максимального тока (рис. 8.4.7 ).
Катушка реле 1 рассчитана на протекание тока в силовой цепи. Для этого она имеет обмотку, изготовленную из провода достаточного поперечного сечения.
При токе, на который настроено реле, произойдет притяжение якоря 2 к сердечнику 3 катушки и с помощью контактного мостика 4 размыкаются контакты 5 в цепи управления магнитного пускателя. Это реле само прервет электроснабжение установки от источника тока.

Нередко встречаются случаи, когда необходимо отключить электроустановку от сети, если уровень напряжения достиг, значения меньше допустимого. Для этой цели используется реле минимального напряжения. Его конструкция напоминает любое электромагнитное реле, но срабатывание здесь происходит при понижении намагниченности катушки и отпадания от нее якоря с контактной системой.
Особое место в схемах защиты электрических установок занимает реле времени. Существуют как электромеханические, так и электронные реле времени.
Рассмотрим конструкцию реле времени типа ЭВ (рис. 8.4.8.).

Основным узлом реле является часовой механизм 2, запускаемый электромагнитной системой 1. Катушка реле включается в силовую цепь и при ее срабатывании часовой механизм вводится в действие. По истечении определенного отрезка времени замкнутся контакты реле и электроустановка отключится от сети. Реле позволяет осуществлять его настройку на различные режимы его работы.
В последние годы получили распространение приборы, в которых электромагнитная и контактная системы объединены в одно целое. Это так называемые герконы (рис. 8.4.9 ).

В герметизированной колбе, заполненной инертным газом, впаяны две или три контактные пластины из пермалоя. Сами контакты (из золота или серебра) находятся на свободных концах пластин. При приближении к геркону постоянного магнита или катушки с током произойдет замыкание или размыкание контактов.
В связи с развитием радиоэлектроники системы автоматического управления пополнились рядом бесконтактных логических элементов. Передачу и преобразование информации от датчика к исполнительному органу можно осуществлять просто, если различать два уровня (две величины) сигнала, каждый из которых может соответствовать, например, символам 0 и 1 или понятиям истинности «да» и «нет». В этом случае сигнал в любой момент времени имеет один из двух возможных значений и называется двоичным сигналом.
8.5.ПРИНЦИПЫ И СХЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
8.5.1. ПРИНЦИПЫ УПРАВЛЕНИЯ
Принцип автоматического управления заключается в том, что без участия человека осуществляется строгое и последовательное выполнение операций по включению, отключению электрооборудования, а также соблюдение заданного режима его работы.
Различают два вида управления: полуавтоматическое и автоматическое. При полуавтоматическом управлении оператор осуществляет первоначальный пуск объекта (нажатие кнопки, поворот ручки и т.д.). В дальнейшем его функции сводятся лишь к наблюдению за ходом процесса. При автоматическом управлении даже начальный импульс по включению установки посылают датчик или реле. Установка полностью работает в автоматическом режиме по заданной программе.
Программное устройство может быть выполнено как на основе электромеханических элементов, так и с помощью логических схем.
8.5.2. СХЕМЫ УПРАВЛЕНИЯ
Приведем несколько часто встречающихся на практике схем управления электродвигателями.
Самой простой из них является схема управления асинхронным трехфазным двигателем с помощью магнитного искателя.
При нажатии кнопки «пуск» подключается к сети катушка электромагнита. Подвижный якорь придет в соприкосновение с сердечником катушки и своим движением замкнет силовые контакты, подающие трехфазное напряжение на электродвигатель. Одновременно с силовыми, замкнутся и блокировочные контакты, которые зашунти-руют кнопку «пуск», что позволяет ее отпустить. При нажатии кнопки «стоп» разрывается цепь питания катушки электромагнита и якорь, освободившись, отпадает, разомк-нув при этом силовые контакты. Электродвигатель остановится.
Защита электродвигателя от длительной перегрузки здесь обеспечивается двумя тепловыми реле РТ, включенными в две фазы. Отключающие контакты тепловых реле РТ1 и РТ2 введены в цепь питания катушки электромагнита.

Для реверсивного управления двигателем применяется схема с двумя магнитными пускателями (рис. 8.5.2.2.).
Один магнитный пускатель коммутирует схему включения двигателя на прямое вращение, а другой — на обратное.
Кнопки «вперед» и «назад» подключают соответственно свои катушки, а кнопка «стоп» и отключающие контакты теплового реле включены в общую цепь управления.
Кратко о гидродинамике: уравнения движения
Написав предыдущий пост, исторический и отчасти рекламный (хотя потенциальные абитуриенты такое вряд ли читают), можно перейти и к разговору «по существу». К сожалению, высокой степени популярности описания добиться вряд ли получится, но всё же постараюсь не устраивать курс сухих лекций. Хотя, от сухости избавиться не удалось, да и пост писался в результате ровно месяц.
В нынешней публикации описаны основные уравнения движения идеальной и вязкой жидкости. По возможности кратко рассмотрен их вывод и физический смысл, а также описаны несколько простейших примеров их точных решений. Увы, этими несколькими примерами доступные аналитически решения уравнений Навье-Стокса в значительной мере исчерпываются. Напомню, что Институт Клэя отнёс доказательство существования и гладкости решений к проблемам тысячелетия. Гении уровня Перельмана и выше — задача вас ждёт.
Понятие сплошной среды
В, если можно так выразиться, «традиционной» гидродинамике, сложившейся исторически, фундаментом является модель сплошной среды. Она отвлекается от молекулярной структуры вещества, и описывает среду несколькими непрерывными полевыми величинами: плотностью, скоростью (определяемой через суммарный импульс молекул в заданном элементе объёма) и давлением. Модель сплошной среды предполагает, что в любом бесконечно малом объёме содержится ещё достаточно много частиц (как принято говорить, термодинамически много — числа, близкие по порядку величины к числу Авогадро — 10 23 шт.). Таким образом, модель ограничена снизу дискретностью молекулярной структуры жидкости, что в задачах типичных пространственных масштабов совершенно несущественно.
Однако, такой подход позволяет описать не только воду в пробирке или водоёме, и оказывается куда более универсальным. Поскольку наша Вселенная на больших масштабах практически однородна, то, как ни странно, она начиная с некоторого масштаба превосходно описывается как сплошная среда, с учётом, конечно же, самогравитации.
Другими, более приземлёнными применениями сплошной среды являются описание свойств упругих тел, динамики плазмы, сыпучих тел. Также можно описывать топлу людей как сжимаемую жидкость.
Параллельно с приближением сплошной среды, в последние годы набирает обороты кинетическая модель, основанная на дискретизации среды на небольшие частицы, взаимодействующие между собой (в простейшем случае — как твердые шарики, отталкивающиеся при столкновении). Такой подход возник в первую очередь благодаря развитию вычислительной техники, однако существенно новых результатов в чистую гидродинамику не превнёс, хотя оказался крайне полезен для задач физики плазмы, которая на микроуровне не является однородной, а содержит электроны и положительно заряженные ионы. Ну и опять же для моделирования Вселенной.
Уравнение неразрывности. Закон сохранения массы
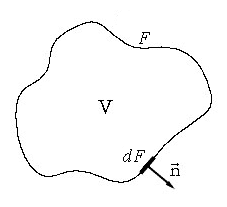
Самый элементарный закон. Пусть у нас есть какой-то совершенно произвольный, но макроскопический объём жидкости V, ограниченный поверхностью F (см. рис.). Масса жидкости внутри него определяется интегралом:

И пусть с жидкостью внутри него не происходит ничего, кроме движения. То есть, там нет химических реакций и фазовых переходов, нет трубок с насосами или чёрных дыр. Ну и всё происходит с маленькими скоростями и для малых масс вещества, потому никакой теории относительности, искривления пространства, самогравитации жидкости (она становится существенна на звёздных масштабах). И пусть сам объём и границы еего неподвижны. Тогда единственное, что может изменить массу жидкости в нашем объёме — это её перетекание через границу объёма (для определённости — пусть масса в объёме убывает):
где вектор j — поток вещества через границу. Точкой, напомним, обозначается скалярное произведение. Поскольку границы объёма, как было сказано, неподвижны, то производную по времени можно внести под интеграл. А правую часть можно преобразовать к такому же, как слева, интегралу по объёму по теореме Гаусса-Остроградского.
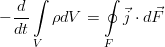
В итоге, в обеих частях равенства получается интеграл по одному и тому же совершенно произвольному объёму, что позволяет приравнять подинтегральные выражения и перейти к дифференциальной форме уравнения:
Здесь (и далее) использован векторный оператор Гамильтона. Образно говоря, это условный вектор, компоненты которого — операторы дифференцирования по соответствующим координатам. С его помощью можно очень кратко обозначать разного рода операции над скалярами, векторами, тензорами высших рангов и прочей математической нечистью, основные среди которых — градиент, дивергенция и ротор. Не буду останавливаться на них детально, поскольку это отвлекает от основной темы.
Наконец, поток вещества равен массе, переносимой через единичную площадку за единицу времени:

Окончательно, закон сохранения массы (называемый также уравнением неразрывности) для сплошной среды таков:
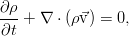
Это выражение наиболее общее, для среды, обладающей переменной плотностью. В реальности, эксперимент свидетельствует о крайне слабой сжимаемости жидкости и практически постоянном значении плотности, что с высокой точностью позволяет применять закон сохранения массы в виде условия несжимаемости:

которое с не менее хорошей точностью работает и для газов, пока скорость течения мала по сравнению со звуковой.
Уравнение Эйлера. Закон сохранения импульса
Весь относительно громоздкий процесс колдовства преобразования интегралов, использованный выше, даёт нам не только уравнение неразрывности. Точно такие же по сути преобразования позволяют выразить законы сохранения импульса и энергии, и получить в итоге уравнения для скорости жидкости и для переноса тепла в ней. Однако пока не будем сильно торопиться, и займёмся не просто сохранением импульса, а даже сохранением импульса в идеальной несжимаемой жидкости — т.е. рассмотрим модель с полным отсутствием вязкости.
Рассуждения практически те же самые, только теперь нас интересует не масса, а полный импульс жидкости в том же самом объёме V. Он равен:

При тех же самых условиях, что и выше, импульс в объёме может меняться за счёт:
- конвективного переноса — т.е. импульс «утекает» вместе со скоростью через границу
- давления окружающих элементов жидкости
- просто за счёт внешних сил, например — от силы тяжести.
Соответствующие интегралы (порядок отвечает списку) дают такое соотношение:

Начнём их преобразовывать. Правда, для этого нужно воспользоваться тензорным анализом и правилами работы с индексами. Конкретнее, к первому и второму интегралам применяется теорема Гаусса-Остроградского в обобщённой форме (она работает не только для векторных полей). И если перейти к дифференциальной форме уравнения, то получится следующее:

Крестик в кружочке обозначает тензорное произведение, в данном случае — векторов.
В принципе, это уже уравнение Эйлера, однако его можно чуток упростить — ведь закон сохранения массы никто не отменял. Раскрыв здесь скобки в дифференциальных операторах и приведя затем подобные слагаемые, мы увидим, что три слагаемых благополучно собираются в уравнение неразрывности, и потому дают в сумме ноль. Итоговое уравнение оказывается таким:

Если перейти в систему отсчёта, связанную с движущейся жидкостью (не будем заострять внимание на том, как это делается), мы увидим, что уравнение Эйлера выражает второй закон Ньютона для единицы объёма среды.
Учёт вязкости. Уравнение Навье-Стокса
Идеальная жидкость, это, конечно, хорошо (правда, всё равно точно не решается), но во многих случаях учёт вязкости необходим. Даже в той же конвекции, в течении жидкости по трубам. Без вязкости вода вытекала бы из наших кранов с космическими скоростями, а малейшая неоднородность температуры в воде приводила бы к её крайне быстрому и бурному перемешиванию. Потому давайте учтём сопротивление жидкости самой себе.
Дополнить уравнение Эйлера можно различными (но эквивалентными, конечно же) путями. Воспользуемся базовой техникой тензорного анализа — индексной формой записи уравнения. И пока также отбросим внешние силы, чтобы не путались под руками / под ногами / перед глазами (нужное подчеркнуть). При таком раскладе всё, кроме производной по времени, можно собрать в виде дивергенции одного такого тензора:

По смыслу, это плотность потока импульса в жидкости. К нему и нужно добавить вязкие силы в виде ещё одного тензорного слагаемого. Поскольку они явно приводят к потере энергии (и импульса), то они должны вычитаться:

Идя обратно в уравнение с таким тензором, мы получим обобщённое уравнение движения вязкой жидкости:

Оно допускает любой закон для вязкости.
Принято считать очевидным, что сопротивление зависит от скорости движения. Вязкость же, как перенос импульса между участками жидкости с различными скоростями, зависит от градиента скорости (но не от самой скорости — тому мешает принцип относительности). Если ограничиться разложением этой зависимости до линейных слагаемых, получится вот такой жутковатый объект:
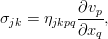
в котором величина перед производной содержит 81 коэффициент. Однако, используя ряд совершенно разумных предположений об однородности и изотропности жидкости, от 81 коэффициента можно перейти всего к двум, и в общем случае для сжимаемой среды, тензор вязких напряжений равен:

где η (эта) — сдвиговая вязкость, а ζ (зета или дзета) — объёмная вязкость. Если же среда ещё и несжимаема, то достаточно одного коэффициента сдвиговой вязкости, т.к. второе слагаемое при этом уходит. Такой закон вязкости
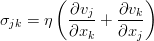
носит название закона Навье, а полученное при его подстановке уравнение движения — это уравнение Навье-Стокса:

Точные решения
Главной проблемой гидродинамики является отсутствие точных решений её уравнений. Как бы с этим ни боролись, но получить действительно всеобщих результатов не удаётся до сих пор, и, напомню, вопрос существования и гладкости решений уравнений Навье-Стокса входит в список Проблем тысячелетия института Клэя.
Однако, несмотря на столь грустные факты, некоторые результаты есть. Здесь будут представлены далеко не все, а лишь самые простые случаи.
Потенциальные течения
Особый интерес представляют течения, в которых жидкость не завихряется. Для такой ситуации можно отказаться от рассмотрения векторного поля скорости, поскольку она выражается через градиент скалярной функции — потенциала. Потенциал же удовлетворяет хорошо изученному уравнению Лапласа, решение которого полностью определяется тем, что задано на границах рассматриваемой области:

Более того, при отсутствии вязкости из уравнения Эйлера можно однозначно выразить и давление, что вовсе замечательно и приводит нас к полному решению задачи. Ах, если бы так было всегда… то гидродинамики, наверное, уже бы и не было как современной и актуальной отрасли.
Дополнительно можно упростить задачу предположением, что течение жидкости двумерно — скажем, всё движется в плоскости (x,y), и ни одна частица не перемещается вдоль оси z. Можно показать, что в таком случае скорость может быть также заменена скалярной функцией (на этот раз — функцией тока):

которая при потенциальном течении удовлетворяет условиям Коши-Лагранжа из теории функций комплексной переменной и воспользоваться соответствующим математическим аппаратом. Полностью совпадающим с аппаратом электростатики. Теория потенциальных течений развита на высоком уровне, и в принципе хорошо описывает большой спектр задач.
Простые течения вязкой жидкости
Решения для вязкой жидкости чаще всего удаётся получить, когда из уравнения Навье-Стокса благодаря свойствам симметрии задачи выпадает нелинейное слагаемое.
Сдвиговое течение Куэтта
Самая элементарная задачка. Канал с неподвижной нижней и подвижной верхней стенкой, которая движется равномерно с некоторой скоростью. На границах жидкость прилипает к ним, так что скорость жидкости равна скорости границы. Этот результат является экспериментальным фактом, и как-то даже авторы первых экспериментов не упоминаются, просто — по совокупности экспериментов.
В такой ситуации от уравнения Навье-Стокса останется уравнение вида v» = 0, и потому профиль скорости в канале окажется линейным:

Данная задача является практически базовой для теории смазки, т.к. позволяет непосредственно определить силу, которую требуется приложить к верхней стенке для её движения с конкретной скоростью.
Течение Пуазейля
Вторая по элементарности — ламинарное течение в канале. Или в трубе. Результат оказывается один — профиль скорости является параболическим:
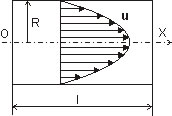
На основе решения Пуазейля можно определить расход жидкости через сечение канала, но, правда, только при ламинарном течении и гладких стенках. С другой стороны, для турбулентного потока и шероховатых стенок точных решений нет, а есть лишь приближённые эмпирические закономерности.
Стекание слоя жидкости по наклонной плоскости
Тут — почти как в задаче Пуазейля, только верхняя граница жидкости будет свободной. Если предположить, что по ней не бегут никакие волны, и вообще сверху нет трения, то профиль скорости будет практически нижней половинкой предыдущего рисунка. Правда, если из полученной зависимости вычислить скорость течения для средней равнинной речки, она составит около 10 км/с, и вода должна самопроизвольно отправляться в космос. Наблюдаемые в природе низкие скорости течения связаны с развитой завихренностью и турбулентностью потока, которые эффективно увеличивают вязкость воды примерно в 1 млн. раз.
В следующем посте планируется рассказать о законе сохранения энергии и соответствующих ему уравнениях переноса тепла при течении жидкости.
http://tsput.ru/res/fizika/1/VOROPAEV_2/vorop8.htm
http://habr.com/ru/post/171327/