Лекция № 4. Кинематика и динамика вращательного движения
(2 часа).
1. Кинематика вращательного движения: угловая скорость и угловое ускорение, их связь с линейной скоростью и ускорением.
2. Момент силы. Уравнение моментов. Момент инерции. Теорема Штейнера. Кинетическая энергия вращательного движения твердого тела.
3. Основное уравнение динамики вращательного движения твердого тела с закрепленной осью вращения. Момент импульса тела. Закон сохранения момента импульса.
4. Гироскопические силы. Гироскопы и их применение в технике.
Цели:
· ввести понятия угловой скорости, углового ускорения, определить их связь с линейными величинами;
· ввести понятие момент силы, записать уравнение моментов;
· ввести понятие момента инерции, сформулировать теорему Штейнера;
· изучить основное уравнение динамики вращательного движения и закон сохранения момента импульса;
· рассмотреть гироскопический эффект, устройство гироскопа и его применение.
Литература:
1. Трофимова Т.И. Курс физики: учебное пособие для инженерно-технических специальностей вузов — М.: Academia, 2006, 2007 и 2008.
2. Грабовский Р. И. Курс физики [Электронный ресурс]: учебное пособие / Р. И. Грабовский — Санкт-Петербург [и др.]: Лань, 2012.
3. Зисман Г. А. Курс общей физики [Электронный ресурс]: [учебное пособие для студентов высших учебных заведений, обучающихся по техническим, естественнонаучным и педагогическим направлениям и специальностям]: В 3-х т. / Г. А. Зисман, О. М. Тодес — Санкт-Петербург [и др.]: Лань, 2007- Т. 2: Электричество и магнетизм.
4. Ливенцев Н.М. Курс физики [Электронный ресурс]: учебное пособие — СПб: Лань, 2012.
5. Рогачев Н. М. Курс физики [Электронный ресурс]: [учебное пособие для студентов вузов, обучающихся в области техники и технологий] / Н. М. Рогачев — Санкт-Петербург [и др.]: Лань, 2010.
6. Александров И.В. и др. Современная физика [Электронный ресурс]: учебное пособие для студентов всех форм обучения, обучающихся по техническим и технологическим направлениям и специальностям — Уфа: УГАТУ, 2008.
Угловая скорость и угловое ускорение
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис. 6). Ее положение через промежуток времени Dt зададим углом D  . Элементарные (бесконечно малые) повороты можно рассматривать как векторы (они обозначаются
. Элементарные (бесконечно малые) повороты можно рассматривать как векторы (они обозначаются  или
или  ). Модуль вектора равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т.е. подчиняетсяправилу правого винта(рис.6). Векторы, направления которых связываются с направлением вращения, называютсяпсевдовекторами илиаксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
). Модуль вектора равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т.е. подчиняетсяправилу правого винта(рис.6). Векторы, направления которых связываются с направлением вращения, называютсяпсевдовекторами илиаксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:

Вектор  направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор (рис.7). Размерность угловой скорости dim w=T – 1 , а ее единица — радиан в секунду (рад/с).
направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор (рис.7). Размерность угловой скорости dim w=T – 1 , а ее единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис. 6)



В векторном виде формулу для линейной скорости можно написать как векторное произведение:

При этом модуль векторного произведения, по определению, равен  , а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
, а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
Если (  = const, то вращение равномерное и его можно характеризовать периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени Dt = T соответствует
= const, то вращение равномерное и его можно характеризовать периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени Dt = T соответствует  = 2p, то = 2p/T, откуда
= 2p, то = 2p/T, откуда

Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:


Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:

При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор  сонаправлен вектору (рис.8), при замедленном — противонаправлен ему (рис.9).
сонаправлен вектору (рис.8), при замедленном — противонаправлен ему (рис.9).
Тангенциальная составляющая ускорения 

Нормальная составляющая ускорения


Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение  , нормальное ускорение
, нормальное ускорение  ) и угловыми величинами (угол поворота j, угловая скорость w, угловое ускорение e) выражается следующими формулами:
) и угловыми величинами (угол поворота j, угловая скорость w, угловое ускорение e) выражается следующими формулами:

В случае равнопеременного движения точки по окружности (e=const)

где w0 — начальная угловая скорость.
При изучении вращения твердых тел будем пользоваться понятием момента инерции. Моментом инерциисистемы (тела) относительно данной оси называется физическая величина, равнаясумме произведений масс л материальных точек системы на квадраты их расстояний до рассматриваемой оси:

В случае непрерывного распределения масс эта сумма сводится к интегралу

где интегрирование производится по всему объему тела. Величина r в этом случае есть функция положения точки с координатами х, у, z.
В качестве примера найдем момент инерции однородного сплошного цилиндра высотой h и радиусом R относительно его геометрической оси (рис. 23). Разобьем цилиндр на отдельные полые концентрические цилиндры бесконечно малой толщины dr с внутренним радиусом r и внешним r+dr. Момент инерции каждого полого цилиндра dJ=r 2 dm (так как dr з dr. Тогда момент инерции сплошного цилиндра

но так как pR 2 h — объем цилиндра, то его масса m=pR 2 hr, а момент инерции

Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера: момент инерции тела J относительно произвольной оси равен моменту его инерции Jc относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы т тела на квадрат расстояния а между осями:
 (16.1)
(16.1)
В заключение приведем значения моментов инерции (табл. 1) для некоторых тел (тела считаются однородными, т — масса тела).


Кинетическая энергия вращения
Рассмотрим абсолютно твердое тело (см. § 1), вращающееся около неподвижной оси z, проходящей через него (рис. 24). Мысленно разобьем это тело на маленькие объемы с элементарными массами т1, т2 . тn , находящиеся на расстоянии r1, r2. rn от оси.
При вращении твердого тела относительно неподвижной оси отдельные его элементарные объемы массами mi опишут окружности различных радиусов ri, и имеют различные линейные скорости vi. Но так как мы рассматриваем абсолютно твердое тело, то угловая скорость вращения этих объемов одинакова:
 (17.1)
(17.1)
Кинетическую энергию вращающегося тела найдем как сумму кинетических энергий его элементарных объемов:


Используя выражение (17.1), получаем

где Jz — момент инерции тела относительно оси z. Таким образом, кинетическая энергия вращающегося тела
 (17.2)
(17.2)
Из сравнения формулы (17.2) с выражением (12.1) для кинетической энергии тела движущегося поступательно (T=mv 2 /2), следует, что момент инерции — мера инертности тела при вращательном движении. Формула (17.2) справедлива для тела вращающегося вокруг неподвижной оси.
В случае плоского движения тела, например цилиндра, скатывающегося с наклонной плоскости без скольжения, энергия движения складывается из энергии поступательного движения и энергии вращения:

где m — масса катящегося тела; vc — скорость центра масс тела; Jc — момент инерции тела относительно оси, проходящей через его центр масс; w — угловая скорость тела.

Момент силы. Уравнение динамики вращательного движения твердого тела
Моментом силы F относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки О в точку А приложения силы, на силу F (рис. 25):

Здесь М — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к F. Модуль момента силы
 (18.1)
(18.1)
где a— угол между r и F; r sina = l — кратчайшее расстояние между линией действия силы и точкой О —плечо силы.
Моментом силы относительно неподвижной оси z называется скалярная величина Mz , равная проекции на эту ось вектора М момента силы, определенного относительно произвольной точки О данной оси z (рис. 26). Значение момента Мz не зависит от выбора положения точки О на оси z.
Если ось z совпадает с направлением вектора М, то момент силы представляется в виде вектора, совпадающего с осью:

Найдем выражение для работы при вращении тела (рис. 27). Пусть сила F приложена в точке В, находящейся от оси z на расстоянии r, a — угол между направлением силы и радиусом-вектором r. Так как тело абсолютно твердое, то работа этой силы равна работе, затраченной на поворот всего тела. При повороте тела на бесконечно малый угол dj точка приложения В проходит путь ds=rdj и работа равна произведению проекции силы на направление смещения на величину смещения:
 (18.2)
(18.2)

Учитывая (18.1), можем записать

где Frsin a = Fl =Mz — момент силы относительно оси z. Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота.
Работа при вращении тела идет на увеличение его кинетической энергии: dA=dT, но  поэтому Mzdj = Jzwdw, или
поэтому Mzdj = Jzwdw, или 
Учитывая, что  получаем
получаем
 (18.3)
(18.3)
Уравнение (18.3) представляет собойуравнение динамики вращательного движения твердого телаотносительно неподвижной оси.
Можно показать, что если ось z совпадает с главной осью инерции (см. § 20), проходящей через центр масс, то имеет место векторное равенство
 (18.4)
(18.4)
где J — главный момент инерции тела (момент инерции относительно главной оси).
Момент импульса и закон то сохранения
При сравнении законов вращательного и поступательного движений просматривается аналогия между ними, только во вращательном движении вместо силы «выступает» ее момент, роль массы «играет» момент инерции. Какая же величина будет аналогом импульса тела? Ею является момент импульса тела относительно оси.
Моментом импульса (количества движения)материальной точки Аотносительно неподвижной точки Оназывается физическая величина, определяемая векторным произведением:

где r — радиус-вектор, проведенный из точки О в точку A, p=mv — импульс материальной точки (рис. 28); L — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к р.
Модуль вектора момента импульса

где a — угол между векторамиrир,l — плечо вектора р относительно точки О.
Моментом импульса относительно неподвижной оси z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси. Момент импульса Lz не зависит от положения точки О на оси z.

При вращении абсолютно твердого тела вокруг неподвижной оси z каждая отдельная точка тела движется по окружности постоянного радиуса ri с некоторой скоростью vi . Скорость vi и импульс mivi перпендикулярны этому радиусу, т. с. радиус является плечом вектора mivi . Поэтому можем записать, что момент импульса отдельной частицы равен
 (19.1)
(19.1)
и направлен по оси в сторону, определяемую правилом правого винта.
Монет импульса твердого телаотносительно оси есть сумма моментов импульса отдельных частиц:


 (19.2)
(19.2)
Таким образом, момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость. Продифференцируем уравнение (19.2) по времени:


Это выражение — еще одна форма уравнения динамики вращательного движения твердого телаотносительно неподвижной оси: производная момента импульса твердого тела относительно оси равна моменту сил относительно той же оси.

Можно показать, что имеет место векторное равенство
 (19.3)
(19.3)
В замкнутой системе момент внешних сил  откуда
откуда
 (19.4)
(19.4)
Выражение (19.4) представляет собой закон сохранения момента импульса: момент импульса замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Закон сохранения момента импульса — фундаментальный закон природы. Он связан со свойством симметрии пространства — его изотропностью, т. е. с инвариантностью физических законов относительно выбора направления осей координат системы отсчета (относительно поворота замкнутой системы в пространстве на любой угол).
Продемонстрировать закон сохранения момента импульса можно с помощью скамьи Жуковского. Пусть человек, сидящий на скамье, которая без трения вращается вокруг вертикальной оси, и держащий в вытянутых руках гантели (рис. 29), приведен во вращение с угловой скоростью w1. Если человек прижмет гантели к себе, то момент инерции системы уменьшится. Поскольку момент внешних сил равен нулю, момент импульса системы сохраняется и угловая скорость вращения w2 возрастает. Аналогично, гимнаст во время прыжка через голову поджимает к туловищу руки и ноги, чтобы уменьшить свой момент инерции и увеличить тем самым угловую скорость вращения.
Сопоставим основные величины и уравнения, определяющие вращение тела вокруг неподвижной оси и его поступательное движение (табл. 2).



Свободные оси. Гироскоп
Для того чтобы сохранить положение оси вращения твердого тела с течением времени неизменным, используют подшипники, в которых она удерживается. Однако существуют такие оси вращения тел, которые не изменяют своей ориентации в пространстве без действия на нее внешних сил. Эти оси называютсясвободными осями (илиосями свободного вращения). Можно доказать, что в любом теле существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями (они называютсяглавными осями инерции тела). Например, главные оси инерции однородного прямоугольного параллелепипеда проходят через центры противоположных граней (рис. 30). Для однородного цилиндра одной из главных осей инерции является его геометрическая ось, а в качестве остальных осей могут быть две любые взаимно перпендикулярные оси, проведенные через центр масс в плоскости, перпендикулярной геометрической оси цилиндра. Главными осями инерции шара являются любые три взаимно перпендикулярные оси, проходящие через центр масс.
Для устойчивости вращения большое значение имеет, какая именно из свободных осей служит осью вращения тела.
Можно показать, что вращение вокруг главных осей с наибольшим и наименьшим моментами инерции оказывается устойчивым, а вращение около оси со средним моментом — неустойчивым. Так, если подбросить тело, имеющее форму параллелепипеда, приведя его одновременно во вращение, то оно, падая, будет устойчиво вращаться вокруг осей 1 и 2 (рис. 30).
Если, например, палочку подвесить за один конец нити, а другой конец, закрепленный к шпинделю центробежной машины, привести в быстрое вращение, то палочка будет вращаться в горизонтальной плоскости около вертикальной оси, перпендикулярной оси палочки и проходящей через ее середину (рис. 31). Это и есть ось свободного вращения (момент инерции при этом положении палочки максимальный). Если теперь палочку, вращающуюся вокруг свободной оси, освободить от внешних связей (аккуратно снять верхний конец нити с крючка шпинделя), то положение оси вращения в пространстве в течение некоторого времени сохраняется. Свойство свободных осей сохранять свое положение в пространстве широко применяется в технике. Наиболее интересны в этом плане гироскопы — массивные однородные тела, вращающиеся с большой угловой скоростью около своей оси симметрии, являющейся свободной осью.

Рассмотрим одну из разновидностей гироскопов — гироскоп на кардановом подвесе (рис. 32). Дискообразное тело — гироскоп — закреплено на оси АА, которая может вращаться вокруг перпендикулярной ей горизонтальной оси ВВ, которая, в свою очередь, может поворачиваться вокруг вертикальной оси DD. Все три оси пересекаются в одной точке С, являющейся центром масс гироскопа и остающейся неподвижной, а ось гироскопа может принять любое направление в пространстве. Силами трения в подшипниках всех трех осей и моментом импульса колец пренебрегаем.
Таккак трение в подшипниках мало, то, пока гироскоп неподвижен, его оси можно придать любое направление. Если начать гироскоп быстро вращать (например, с помощью намотанной на ось веревочки) и поворачивать его подставку, то ось гироскопа сохраняет свое положение в пространстве неизменной. Это можно объяснить с помощью основного закона динамики вращательного движения. Для свободно вращающегося гироскопа сила тяжести не может изменить ориентацию его свободной оси, так как эта сила приложена к центру масс (центр вращения С совпадает с центром масс), а момент силы тяжести относительно закрепленного центра масс равен нулю. Моментом сил трения мы также пренебрегаем. Поэтому если момент внешних сил относительно его закрепленного центра масс равен нулю, то, как следует из уравнения (19.3), L = const. т. е. момент импульса гироскопа сохраняет свою величину и направление в пространстве. Следовательно, вместе с ним сохраняет свое положение в пространстве и ось гироскопа.
Чтобы ось гироскопа изменила свое направление в пространстве, необходимо, согласно (19.3), отличие от нуля момента внешних сил. Если момент внешних сил, приложенных к вращающемуся гироскопу, относительно его центра масс отличен от нуля, то наблюдается явление, получившее названиегироскопического эффекта. Оно состоит в том, что под действием пары сил F, приложенной к оси вращающегося гироскопа, ось гироскопа (рис. 33) поворачивается вокруг прямой О3О3, а не вокруг прямой O2O2 , как это казалось бы естественным на первый взгляд (O1O1 и O2O2 лежат в плоскости чертежа, а О3О3 и силы F перпендикулярны ей).

Гироскопический эффект объясняется следующим образом. Момент М пары сил F направлен вдоль прямой О2О2. За время dt момент импульса L гироскопа получит приращение dL=Mdt (направление dL совпадает с направлением М) и станет равным L’=L+dL. Направление вектора L’ совпадает с новым направлением оси вращения гироскопа. Таким образом, ось вращения гироскопа повернется вокруг прямой О3О3. Если время действия силы мало, то, хотя момент сил М и велик, изменение момента импульса dL гироскопа будет также весьма малым. Поэтому кратковременное действие сил практически не приводит к изменению ориентации оси вращения гироскопа в пространстве. Для ее изменения следует прикладывать силы в течение длительного времени.
Если ось гироскопа закреплена подшипниками, то вследствие гироскопического эффекта возникают так называемые гироскопические силы, действующие на опоры, в которых вращается ось гироскопа. Их действие необходимо учитывать при конструировании устройств, содержащих быстровращающиеся массивные составные части. Гироскопические силы имеют смысл только во вращающейся системе отсчета и являются частным случаем кориолисовой силы инерции (см. § 27).
Гироскопы применяются в различных гироскопических навигационных приборах (гирокомпас, гирогоризонт и т. д.). Другое важное применение гироскопов — поддержание заданного направления движения транспортных средств, например судна (авторулевой) и самолета (автопилот) и т. д. При всяком отклонении от курса вследствие каких-то воздействий (волны, порыва ветра и т. д.) положение оси гироскопа в пространстве сохраняется. Следовательно, ось гироскопа вместе с рамами карданова подвеса поворачивается относительно движущегося устройства. Поворот рам карданова подвеса с помощью определенных приспособлений включает рули управления, которые возвращают движение к заданному курсу.
Впервые гироскоп применен французским физиком Ж. Фуко (1819—1868) для доказательства вращения Земли.
Контрольные вопросы
- Что называется угловой скоростью?
- Что называется угловым ускорением? Как оно связано с угловой скоростью?
- Как определяются направления угловой скорости и углового ускорения?
- Какова связь между линейными и угловыми величинами?
- Что такое момент инерции тела?
- Какова роль момента инерции во вращательном движении?
- Выведите формулу для момента инерции обруча.
- Сформулируйте и поясните теорему Штейнера.
- Какова формула для кинетической энергии тела, вращающегося вокруг неподвижной оси, и как ее вывести?
- Что называется моментом силы относительно неподвижной точки? относительно неподвижной оси? Как определяется направление момента силы?
- Выведите и сформулируйте уравнение динамики вращательного движения твердого тела.
- Что такое момент импульса материальной точки? твердого тела? Как определяется направление вектора момента импульса?
- В чем заключается физическая сущность закона сохранения момента импульса?
- Каким свойством симметрии пространства обусловливается справедливость закона сохранения момента импульса?
- Что такое свободные оси (главные оси инерции)? Какие из них являются устойчивыми?
- Что такое гироскоп? Каковы его основные свойства?
Вращательное движение тела. Закон вращательного движения
В этой статье описывается важный раздел физики — «Кинематика и динамика вращательного движения».
Основные понятия кинематики вращательного движения
Вращательным движением материальной точки вокруг неподвижной оси называют такое движение, траекторией которого является окружность, находящаяся в плоскости перпендикулярной к оси, а центр ее лежит на оси вращения.
Вращательное движение твердого тела — это движение, при котором по концентрическим (центры которых лежат на одной оси) окружностям движутся все точки тела в соответствии с правилом для вращательного движения материальной точки.
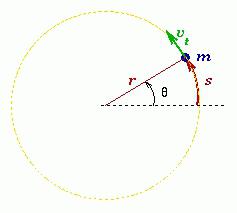
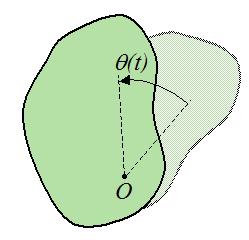
Пусть произвольное твердое тело T совершает вращения вокруг оси O, которая перпендикулярна плоскости рисунка. Выберем на данном теле точку M. При вращении эта точка будет описывать вокруг оси O круг радиусом r.
Через некоторое время радиус повернется относительно исходного положения на угол Δφ.
За положительное направление поворота принято направление правого винта (по часовой стрелке). Изменение угла поворота со временем называется уравнением вращательного движения твердого тела:
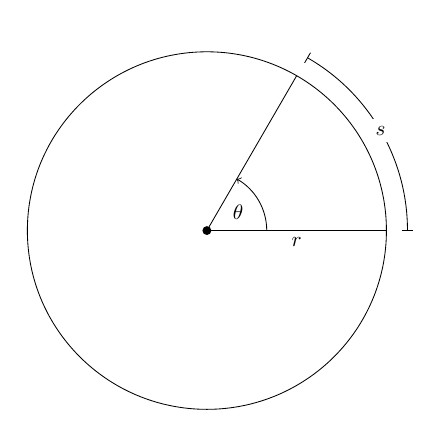
Если φ измерять в радианах (1 рад — это угол, соответствующий дуге, длиной равной ее радиусу), то длина дуги окружности ΔS, которую пройдет материальная точка M за время Δt, равна:
Основные элементы кинематики равномерного вращательного движения
Мерой перемещения материальной точки за небольшой промежуток времени dt служит вектор элементарного поворота dφ.
Угловая скорость материальной точки или тела — это физическая величина, которая определяется отношением вектора элементарного поворота к продолжительности этого поворота. Направление вектора можно определить правилом правого винта вдоль оси О. В скалярном виде:
Если ω = dφ/dt = const, то такое движение называется равномерное вращательное движение. При нем угловую скорость определяют по формуле
Согласно предварительной формуле размерность угловой скорости
Равномерное вращательное движение тела можно описать периодом вращения. Период вращения T — физическая величина, определяющая время, за которое тело вокруг оси вращения выполняет один полный оборот ([T] = 1 с). Если в формуле для угловой скорости принять t = T, φ = 2 π (полный один оборот радиуса r), то
поэтому период вращения определим следующим образом:
Число оборотов, которое за единицу времени совершает тело, называется частотой вращения ν, которая равна:
Единицы измерения частоты: [ν]= 1/c = 1 c -1 = 1 Гц.
Сравнивая формулы для угловой скорости и частоты вращения, получим выражение, связывающее эти величины:
Основные элементы кинематики неравномерного вращательного движения
Неравномерное вращательное движение твердого тела или материальной точки вокруг неподвижной оси характеризует его угловая скорость, которая изменяется со временем.
Вектор ε, характеризующий скорость изменения угловой скорости, называется вектором углового ускорения:
Если тело вращается, ускоряясь, то есть dω/dt > 0, вектор имеет направление вдоль оси в ту же сторону, что и ω.
Если вращательное движение замедлено — dω/dt 2 /r = ω 2 r 2 /r.
Итак, в скалярном виде
Тангенциальное ускоренной материальной точки, которая выполняет вращательное движение
Момент импульса материальной точки
Векторное произведение радиуса-вектора траектории материальной точки массой mi на ее импульс называется моментом импульса этой точки касательно оси вращения. Направление вектора можно определить, воспользовавшись правилом правого винта.
Момент импульса материальной точки (Li) направлен перпендикулярно плоскости, проведенной через ri и υi, и образует с ними правую тройку векторов (то есть при движении с конца вектора ri к υi правый винт покажет направление вектора Li).
В скалярной форме
Учитывая, что при движении по кругу радиус-вектор и вектор линейной скорости для i-й материальной точки взаимно перпендикулярные,
Так что момент импульса материальной точки для вращательного движения примет вид
Момент силы, которая действует на i-ю материальную точку
Векторное произведение радиуса-вектора, который проведен в точку приложения силы, на эту силу называется моментом силы, действующей на i-ю материальную точку относительно оси вращения.
В скалярной форме
Величина li, равная длине перпендикуляра, опущенного из точки вращения на направление действия силы, называется плечом силы Fi.
Динамика вращательного движения
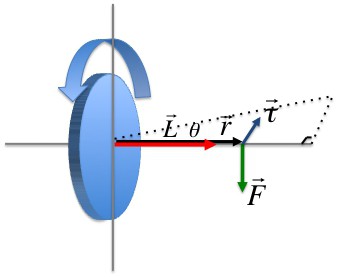
Уравнение динамики вращательного движения записывается так:
Формулировка закона следующая: скорость изменения момента импульса тела, которое совершает вращение вокруг неподвижной оси, равна результирующему моменту относительно этой оси всех внешних сил, приложенных к телу.
Момент импульса и момент инерции
Известно, что для i-й материальной точки момент импульса в скалярной форме задается формулой
Если вместо линейной скорости подставить ее выражение через угловую:
то выражение для момента импульса примет вид
Величина Ii = miri 2 называется моментом инерции относительно оси i-й материальной точки абсолютно твердого тела, проходящей через его центр масс. Тогда момент импульса материальной точки запишем:
Момент импульса абсолютно твердого тела запишем как сумму моментов импульса материальных точек, составляющих данное тело:
Момент силы и момент инерции
Закон вращательного движения гласит:
Известно, что представить момент импульса тела можно через момент инерции:
Учитывая, что угловое ускорение определяется выражением
получим формулу для момента силы, представленного через момент инерции:
Замечание. Момент силы считается положительным, если угловое ускорение, которым он вызван, больше нуля, и наоборот.
Теорема Штейнера. Закон сложения моментов инерции
Если ось вращения тела через центр масс его не проходит, то относительно этой оси можно найти его момент инерции по теореме Штейнера:
I = I0 + ma 2 ,
где I0 — начальный момент инерции тела; m — масса тела; a — расстояние между осями.
Если система, которая совершает обороты округ неподвижной оси, состоит из n тел, то суммарный момент инерции такого типа системы будет равен сумме моментов, ее составляющих (закон сложения моментов инерции).
Вращение твердого тела
Для кинематического описания процесса вращения твердого тела нужно ввести такие понятия как угловое перемещение Δ φ , угловое ускорение ε и угловая скорость ω :
ω = ∆ φ ∆ t , ( ∆ t → 0 ) , ε = ∆ φ ∆ t , ( ∆ t → 0 ) .
Углы выражаются в радианах. За положительное направление вращения принимается направление против часовой стрелки.
Когда твердое тело вращается относительно неподвижной оси, все точки этого тела перемещаются с одинаковыми угловыми скоростями и ускорениями.
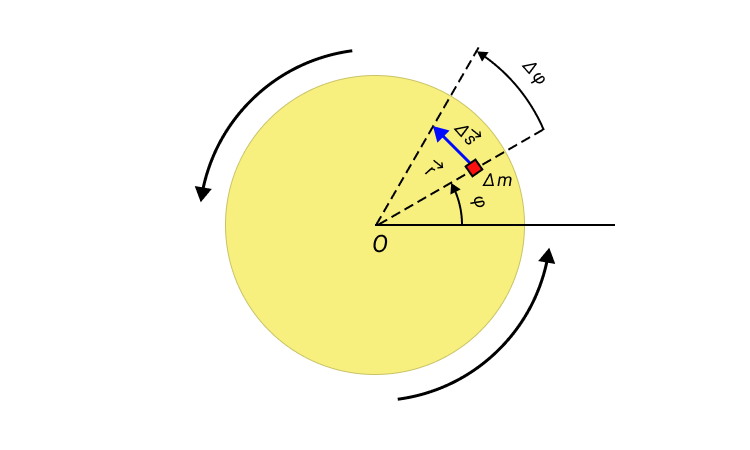
Рисунок 1. Вращение диска относительно оси, проходящей через его центр O .
Если угловое перемещение Δ φ мало, то модуль вектора линейного перемещения ∆ s → некоторого элемента массы Δ m вращающегося твердого тела можно выразить соотношением:
в котором r – модуль радиус-вектора r → .
Между модулями угловой и линейной скоростей можно установить связь посредством равенства
Модули линейного и углового ускорения также взаимосвязаны:
Векторы v → и a → = a τ → направлены по касательной к окружности радиуса r .
Также нам необходимо учесть возникновение нормального или центростремительного ускорения, которое всегда возникает при движении тел по окружности.
Модуль ускорения выражается формулой:
a n = v 2 r = ω 2 r .
Если разделить вращающееся тело на небольшие фрагменты Δ m i , обозначить расстояние до оси вращения через r i , а модули линейных скоростей через v i , то запись формулы кинестетической энергии вращающегося тела будет иметь вид:
E k = ∑ i ν m v i 2 2 = ∑ i ∆ m ( r i ω ) 2 2 = ω 2 2 ∑ i ∆ m i r i 2 .
Физическая величина ∑ i ∆ m i r i 2 носит название момента инерции I тела относительно оси вращения. Она зависит от распределения масс вращающегося тела относительно оси вращения:
I = ∑ i ∆ m i r i 2 .
В пределе при Δ m → 0 эта сумма переходит в интеграл. Единица измерения момента инерции в С И – килограмм—метр в квадрате ( к г · м 2 ) . Таким образом, кинетическую энергию твердого тела, вращающегося относительно неподвижной оси, можно представить в виде:
В отличие от выражения, которое мы использовали для описания кинестетической энергии поступательно движущегося тела m v 2 2 , вместо массы m в формулу входит момент инерции I . Также мы принимаем во внимание вместо линейной скорости v угловую скорость ω .
Если для динамики поступательного движения основную роль играет масса тела, то в динамике вращательного движения имеет значение момент инерции. Но если масса – это свойство рассматриваемого твердого тела, которое не зависит от скорости движения и других факторов, то момент инерции зависит от того, вокруг какой оси вращается тело. Для одного и того же тела момент инерции будет определяться различными осями вращения.
В большинстве задач считается, что ось вращения твердого тела проходит через центр его массы.
Положение x C , y C центра масс для простого случая системы из двух частиц с массами m 1 и m 2 , расположенными в плоскости X Y в точках с координатами x 1 , y 1 и x 2 , y 2 определяется выражениями:
x C = m 1 x 1 + m 2 x 2 m 1 + m 2 , y C = m 1 y 1 + m 2 y 2 m 1 + m 2 .
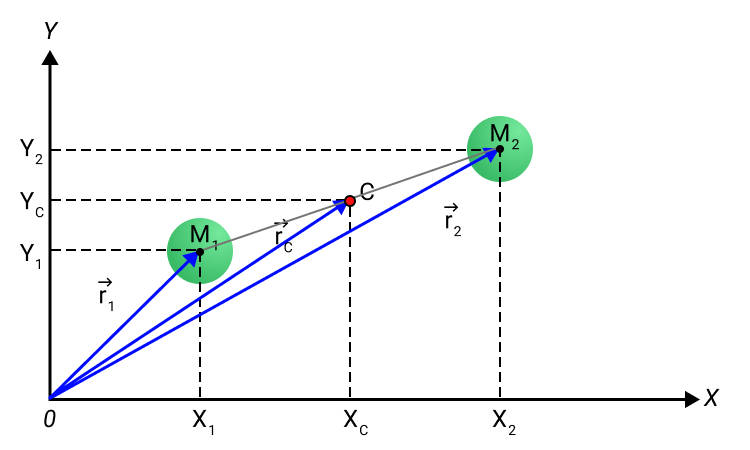
Рисунок 2. Центр масс C системы из двух частиц.
В векторной форме это соотношение принимает вид:
r C → = m 1 r 1 → + m 2 r 2 → m 1 + m 2 .
Аналогично, для системы из многих частиц радиус-вектор r C → центра масс определяется выражением
r C → = ∑ m i r i → ∑ m i .
Если мы имеем дело с твердым телом, состоящим из одной части, то в приведенном выражении суммы для r C → необходимо заменить интегралами.
Центр масс в однородном поле тяготения совпадает с центром тяжести. Это значит, что если мы возьмем тело сложной формы и подвесим его за центр масс, то в однородном поле тяготения это тело будет находиться в равновесии. Отсюда следует способ определения центра масс сложного тела на практике: его необходимо последовательно подвесить за несколько точек, одновременно отмечая по отвесу вертикальные линии.
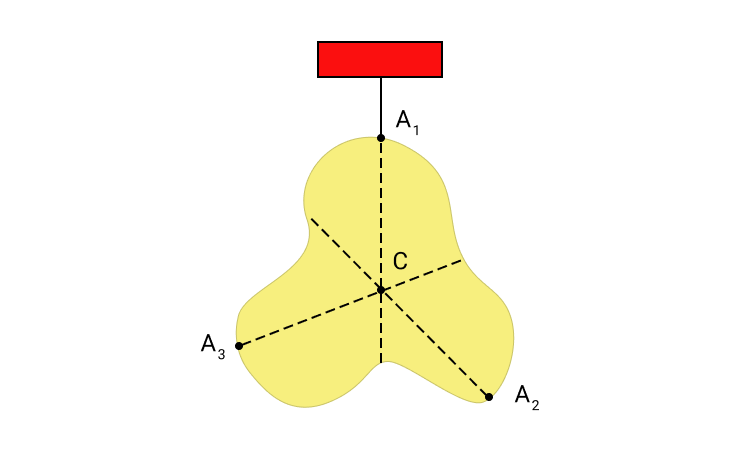
Рисунок 3. Определение положения центра масс C тела сложной формы. A 1 , A 2 , A 3 точки подвеса.
На рисунке мы видим тело, которое подвешено за центр масс. Оно находится в состоянии безразличного равновесия. В однородном поле тяготения равнодействующая сил тяжести приложена к центру масс.
Мы можем представить любое движение твердого тела как сумму двух движений. Первое поступательное, которое производится со скоростью центра масс тела. Второе – это вращение относительно оси, которая проходит через центр масс.
Предположим. Что у нас есть колесо, которое катится по горизонтальной поверхности без проскальзывания. Все точки колеса во время движения перемещаются параллельно одной плоскости. Такое движение мы можем обозначить как плоское.
Теорема о движении центра масс
Кинестетическая энергия вращающегося твердого тела при плоском движении будет равна сумме кинетической энергии поступательного движения и кинетической энергии вращения относительно оси, которая проведена через центр масс и располагается перпендикулярно плоскостям, в которых движутся все точки тела:
E k = m v C 2 2 + I C ω 2 2 ,
где m – полная масса тела, I C – момент инерции тела относительно оси, проходящей через центр масс.
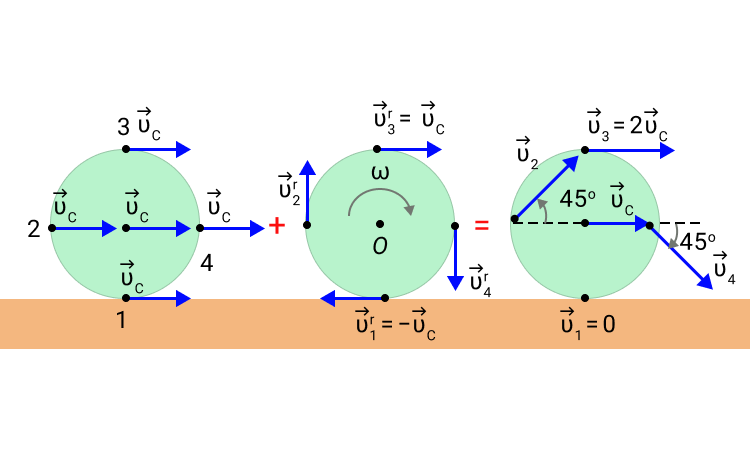
Рисунок 4. Качение колеса как сумма поступательного движения со скоростью v C → и вращения с угловой скоростью ω = v C R относительно оси O , проходящей через центр масс.
В механике используется теорема о движении центра масс.
Любое тело или несколько взаимодействующих тел, которые представляют собой единую систему, обладают центром масс. Этот центр масс под воздействием внешних сил перемещается в пространстве как материальная точка, в которой сосредоточена вся масса системы.
На рисунке мы изобразили движение твердого тела, на которое действуют силы тяжести. Центр масс тела движется по траектории, которая близка к параболе, тогда как траектория остальных точек тела является более сложной.
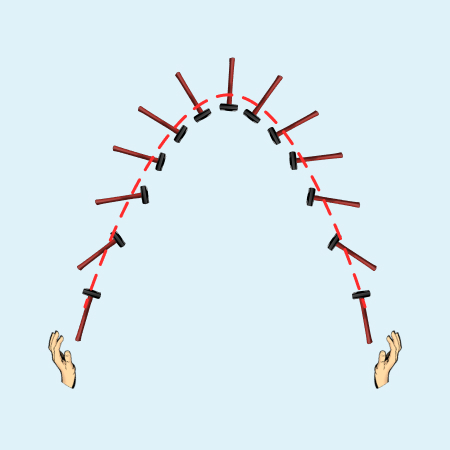
Рисунок 5. Движение твердого тела под действием силы тяжести.
Теорема Штейнера о параллельном переносе оси вращения
Рассмотрим случай, когда твердое тело движется вокруг некоторой неподвижной оси. Момент инерции этого тела инерции I можно выразить через момент инерции I C этого тела относительно оси, проходящей через центр масс тела и параллельной первой.
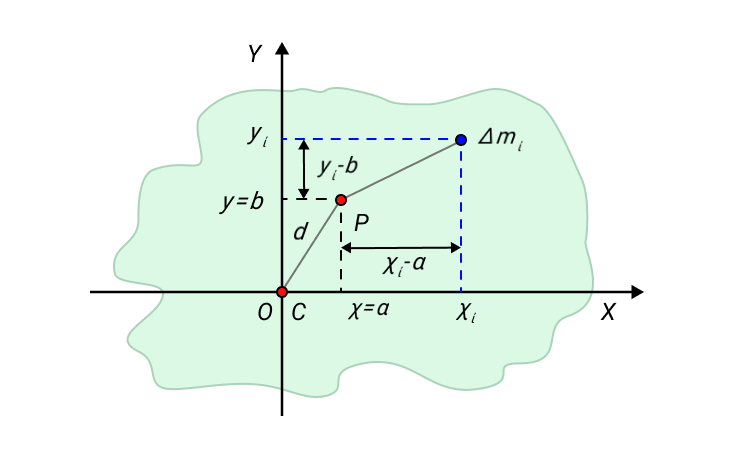
Рисунок 6. К доказательству теоремы о параллельном переносе оси вращения.
Для примера возьмем твердое тело, форма которого произвольна. Обозначим центр масс С . Выберем систему координат Х У с началом координат 0 . Совместим центр масс и начало координат.
Одна из осей проходит через центр масс С . Вторая ось пересекает произвольно выбранную точку Р , которая расположена на расстоянии d от начала координат. Выделим некоторый малый элемент массы данного твердого тела Δ m i .
По определению момента инерции:
I C = ∑ ∆ m i ( x i 2 + y i 2 ) , I P = ∑ m i ( x i — a ) 2 + y i — b 2
Выражение для I P можно переписать в виде:
I P = ∑ ∆ m i ( x i 2 + y i 2 ) + ∑ ∆ m i ( a 2 + b 2 ) — 2 a ∑ ∆ m i x i — 2 b ∑ ∆ m i y i .
Два последних члена уравнения обращаются в нуль, так как начало координат в нашем случае совпадает с центром масс тела.
Так мы пришли к формуле теоремы Штейнера о параллельном переносе оси вращения.
Для тела, которое вращается относительно произвольной неподвижной оси, момент инерции, согласно теореме Штейнера, равен сумме момента инерции этого тела относительно параллельной ей оси, проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между осями.
I P = I C + m d 2 ,
где m – полная масса тела.
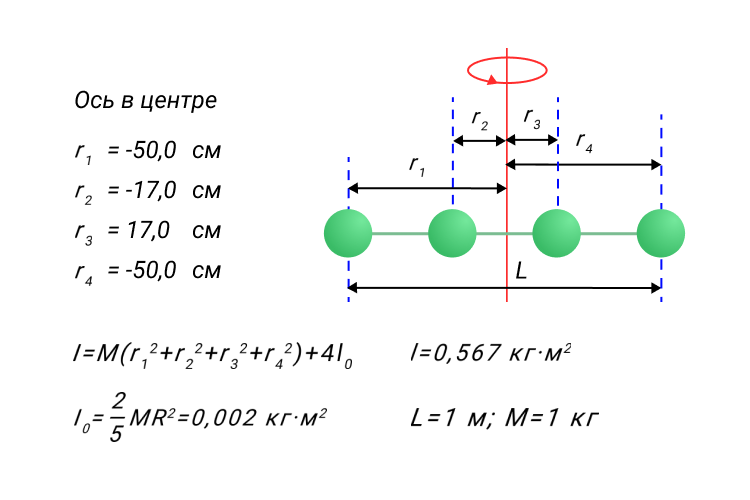
Рисунок 7. Модель момента инерции.
На рисунке ниже изображены однородные твердые тела различной формы и указаны моменты инерции этих тел относительно оси, проходящей через центр масс.
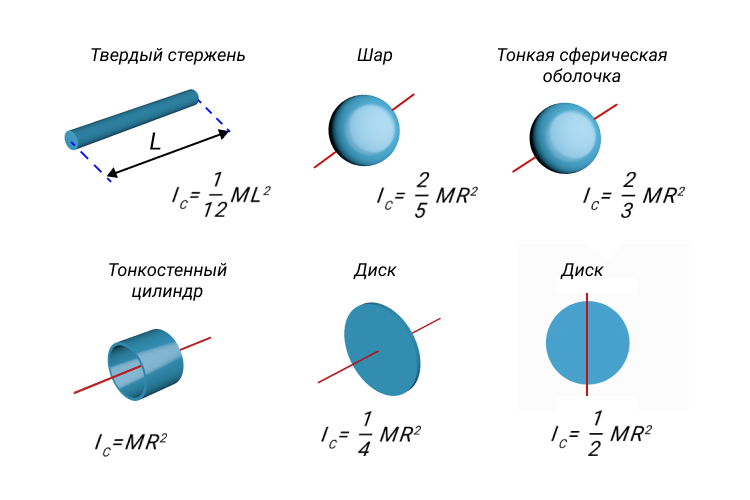
Рисунок 8. Моменты инерции I C некоторых однородных твердых тел.
Основное уравнение динамики вращательного движения твердого тела
В тех случаях, когда мы имеем дело с твердым телом, которое вращается относительно неподвижной оси, мы можем обобщить второй закон Ньютона. На рисунке ниже мы изобразили твердое тело произвольной формы, вращающееся относительно некоторой оси, проходящей через точку О . Ось вращения расположена перпендикулярно плоскости рисунка.
Δ m i – это произвольный малый элемент массы, на который оказывают воздействие внешние и внутренние силы. Равнодействующая всех сил есть F i → . Ее можно разложить на две составляющие: касательную составляющую F i τ → и радиальную F i r → . Радиальная составляющая F i r → создает центростремительное ускорение a n .
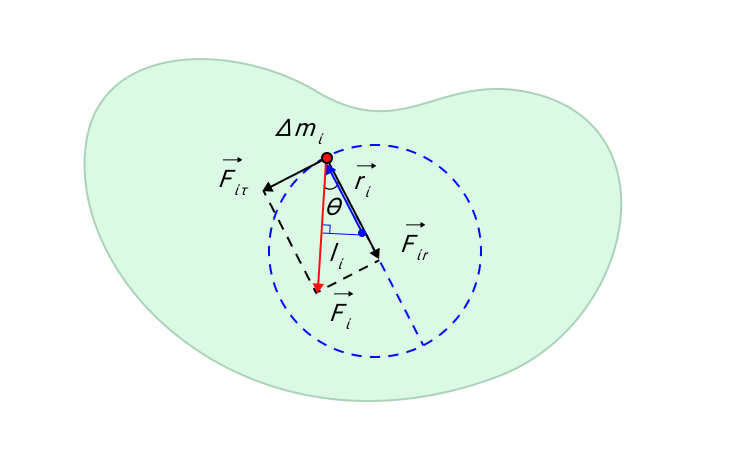
Рисунок 9. Касательная F i τ → и радиальная F i r → составляющие силы F i → действующей на элемент Δ m i твердого тела.
Касательная составляющая F i τ → вызывает тангенциальное ускорение a i τ → массы Δ m i . Второй закон Ньютона, записанный в скалярной форме, дает
∆ m i a i τ = F i τ sin θ или ∆ m i r i ε = F i sin θ ,
где ε = a i τ r i – угловое ускорение всех точек твердого тела.
Если обе части написанного выше уравнения умножить на r i , то мы получим:
∆ m i r i 2 ε = F i r i sin θ = F i l i = M i .
Здесь l i – плечо силы, F i , → M i – момент силы.
Теперь нужно аналогичные соотношения записать для всех элементов массы Δmi вращающегося твердого тела, а затем просуммировать левые и правые части. Это дает:
∑ ∆ m i r i 2 ε = ∑ M i .
Стоящая в правой части сумма моментов сил, действующих на различные точки твердого тела, состоит из суммы моментов всех внешних сил и суммы моментов всех внутренних сил.
∑ M = ∑ M i в н е ш н + ∑ M i в н у т р .
Но сумма моментов всех внутренних сил согласно третьему закону Ньютона равна нулю, поэтому в правой части остается только сумма моментов всех внешних сил, которые мы будем обозначать через M . Так мы получили основное уравнение динамики вращательного движения твердого тела.
Угловое ускорение ε и момент сил M в этом уравнении являются величинами алгебраическими.
Обычно за положительное направление вращения принимают направление против часовой стрелки.
Возможна и векторная форма записи основного уравнения динамики вращательного движения, при которой величины ω → , ε → , M → определяются как векторы, направленные по оси вращения.
Закон сохранения момента импульса
В разделе, посвященном поступательному движению тела, мы ввели понятие импульса тела p → . По аналогии с поступательным движением для вращательного движения мы вводим понятие момента импульса.
Момент импульса вращающегося тела – это физическая величина, которая равняется произведению момента инерции тела I на угловую скорость ω его вращения.
Для обозначения момента импульса используется латинская буква L .
Поскольку ε = ∆ ω ∆ t ; ∆ t → 0 , уравнение вращательного движения можно представить в виде:
M = I ε = I ∆ ω ∆ t или M ∆ t = I ∆ ω = ∆ L .
M = ∆ L ∆ t ; ( ∆ t → 0 ) .
Мы получили это уравнение для случая, когда I = c o n s t . Но оно будет справедливо и тогда, когда момент инерции тела будет изменяться в процессе движения.
Если суммарный момент M внешних сил, действующих на тело, равен нулю, то момент импульса L = I ω относительно данной оси сохраняется: ∆ L = 0 , если M = 0 .
L = l ω = c o n s t .
Так мы пришли к закону сохранения момента импульса.
В качестве примера приведем рисунок, на котором изображено неупругое вращательное столкновение дисков, которые насажены на общую для них ось.
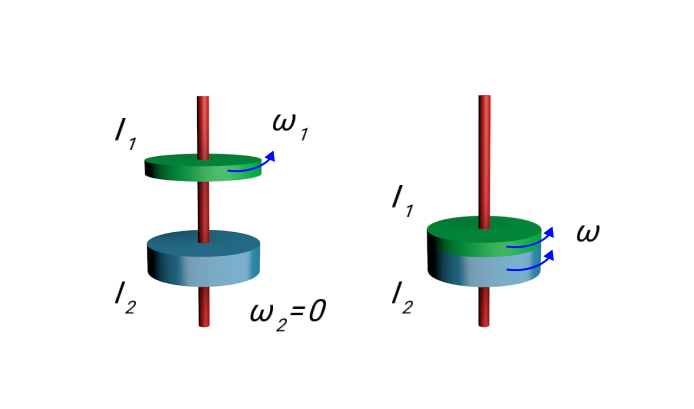
Рисунок 10. Неупругое вращательное столкновение двух дисков. Закон сохранения момента импульса: I 1 ω 1 = ( I 1 + I 2 ) ω .
Мы имеем дело с замкнутой системой. Для любой замкнутой системы закон сохранения момента импульса будет справедливым. Он выполняется и в условиях экспериментов по механике, и в условиях космоса, когда планеты движутся по своим орбитам вокруг звезды.
Мы можем записать уравнение динамики вращательного движения как для неподвижной оси, так и для оси, которая перемещается равномерно или с ускорением. Вид уравнения не изменится и в том случае, если ось движется ускоренно. Для этого должно выполняться два условия: ось должна проходить через центр массы тела, а ее направление в пространстве остается неизменным.
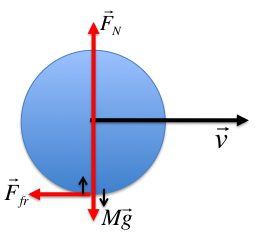
Предположим, что у нас есть тело (шар или цилиндр), которое катится по наклонной плоскости с некоторым трением.
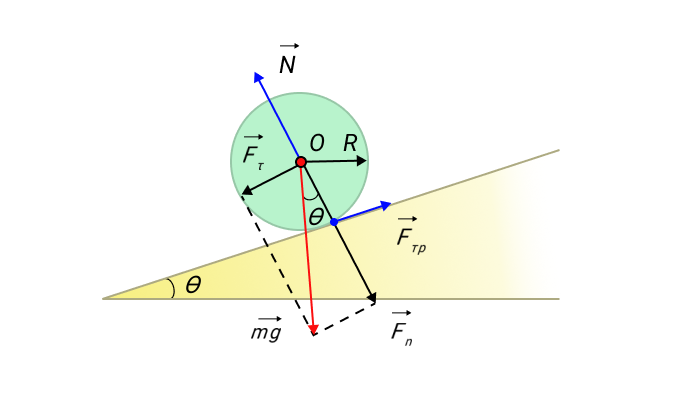
Рисунок 11. Качение симметричного тела по наклонной плоскости.
Ось вращения O проходит через центр масс тела. Моменты силы тяжести m g → и силы реакции N → относительно оси O равны нулю. Момент M создает только сила трения: M = F т р R .
Уравнение вращательного движения:
I C ε = I C a R = M = F т р R ,
где ε – угловое ускорение катящегося тела, a – линейное ускорение его центра масс, I C – момент инерции относительно оси O , проходящей через центр масс.
Второй закон Ньютона для поступательного движения центра масс записывается в виде:
m a = m g sin α — F т р .
Исключая из этих уравнений F т р , получим окончательно:
α = m g sin θ I C R 2 + m .
Из этого выражения видно, что быстрее будет скатываться с наклонной плоскости тело, обладающее меньшим моментом инерции. Например, у шара I C = 2 5 m R 2 , а у сплошного однородного цилиндра I C = 1 2 m R 2 . Следовательно, шар будет скатываться быстрее цилиндра.
http://www.syl.ru/article/189925/new_vraschatelnoe-dvijenie-tela-zakon-vraschatelnogo-dvijeniya
http://zaochnik.com/spravochnik/fizika/zakony-sohranenija-v-mehanike/vraschenie-tverdogo-tela/