Равновесие произвольной пространственной системы сил – решение задачи
![]()
Порядок решения задач на равновесие с произвольной пространственной системой сил
Чтобы решить задачу на равновесие твердого тела с произвольной пространственной системой сил, надо выбрать прямоугольную систему координат и, относительно нее, составить уравнения равновесия.
Уравнения равновесия, для произвольной системы сил, распределенных в трехмерном пространстве, представляют собой два векторных уравнения:
векторная сумма сил, действующих на тело, равна нулю
(1) ;
векторная сумма моментов сил, относительно начала координат, равна нулю
(2) .
Пусть Oxyz – выбранная нами система координат. Спроектировав уравнения (1) и (2) на оси этой системы, получим шесть уравнений:
суммы проекций сил на оси xyz равны нулю
(1.x) ;
(1.y) ;
(1.z) ;
суммы моментов сил относительно осей координат равны нулю
(2.x) ;
(2.y) ;
(2.z) .
Здесь мы считаем, что на тело действуют n сил, включая силы реакций опор.
Пусть произвольная сила , с компонентами , приложена к телу в точке . Тогда моменты этой силы относительно осей координат определяются по формулам:
(3.x) ;
(3.y) ;
(3.z) .
Таким образом, порядок решения задачи, на равновесие с произвольной пространственной системой сил, следующий.
- Отбрасываем опоры и заменяем их силами реакций. Если опорой является стержень или нить, то сила реакции направлена вдоль стержня или нити.
- Выбираем прямоугольную систему координат Oxyz .
- Находим проекции векторов сил на оси координат, , и точек их приложения, . Точку приложения силы можно перемещать вдоль прямой, проведенной через вектор силы. От такого перемещения значения моментов не изменятся. Поэтому выбираем наиболее удобные для расчета точки приложения сил.
- Составляем три уравнения равновесия для сил (1.x,y,z).
- Для каждой силы, по формулам (3.x,y,z), находим проекции моментов силы на оси координат.
- Составляем три уравнения равновесия для моментов сил (2.x,y,z).
- Если число переменных больше числа уравнений, то задача статически неопределима. Методами статики ее решить нельзя. Нужно использовать методы сопротивления материалов.
- Решаем полученные уравнения.
Упрощение расчетов
В некоторых случаях удается упростить вычисления, если вместо уравнения (2) использовать эквивалентное условие равновесия.
Сумма моментов сил относительно произвольной оси AA′ равна нулю:
(4) .
То есть можно выбрать несколько дополнительных осей, не совпадающих с осями координат. И относительно этих осей составить уравнения (4).
Далее приводится пример, в котором удается упростить вычисления за счет соответствующего выбора осей.
Пример решения задачи на равновесие произвольной пространственной системы сил
![]()
Найти реакции стержней, поддерживающих тонкую однородную горизонтальную плиту в трехмерном пространстве. Система крепления стержней показана на рисунке. На плиту действуют: сила тяжести G; и сила P, приложенная в точке A, направленная вдоль стороны AB.
Дано:
G = 28 kН ; P = 35 kН ; a = 7,5 м ; b = 6,0 м ; c = 3,5 м .
Решение задачи
Сначала мы решим эту задачу стандартным способом, применимым для произвольной пространственной системы сил. А затем получим более простое решение, основываясь на конкретной геометрии системы, за счет выбора осей при составлении уравнений равновесия.
Решение задачи стандартным способом
Этот метод хоть и приведет нас к довольно громоздким вычислениям, но он применим для произвольной пространственной системы сил, и может применяться в расчетах на ЭВМ.
Отбросим связи и заменим их силами реакций. Связями здесь являются стержни 1–6. Вводим вместо них силы , направленные вдоль стержней. Направления сил выбираем наугад. Если мы не угадаем с направлением какой-либо силы, то получим для нее отрицательное значение.
![]()
Проводим систему координат Oxyz с началом в точке O .
Находим проекции сил на оси координат.
Для силы имеем:
.
Здесь α 1 – угол между LQ и BQ . Из прямоугольного треугольника LQB :
м ;
;
.
Силы , и параллельны оси z . Их компоненты:
;
;
.
Для силы находим:
.
Здесь α 3 – угол между QT и DT . Из прямоугольного треугольника QTD :
м ;
;
.
Для силы :
.
Здесь α 5 – угол между LO и LA . Из прямоугольного треугольника LOA :
м ;
;
.
Сила направлена по диагонали прямоугольного параллелепипеда. Она имеет следующие проекции на оси координат:
.
Здесь – направляющие косинусы диагонали AQ :
м ;
;
;
.
Выбираем точки приложения сил. Воспользуемся тем, что их можно перемещать вдоль линий, проведенных через векторы сил. Так, в качестве точки приложения силы можно взять любую точку на прямой TD . Возьмем точку T , поскольку для нее x и z — координаты равны нулю:
.
Аналогичным способом выбираем точки приложения остальных сил.
В результате получаем следующие значения компонентов сил и точек их приложений:
; (точка B );
; (точка Q );
; (точка T );
; (точка O );
; (точка A );
; (точка A );
; (точка A );
; (точка K ).
Составляем уравнения равновесия для сил. Суммы проекций сил на оси координат равны нулю.
;
;
.
Составляем уравнения равновесия для моментов сил. Суммы моментов сил относительно осей координат равны нулю.
;
;
;
В этой системе шесть уравнений и шесть неизвестных. Далее сюда можно подставить численные значения и получить решение системы, используя математическую программу вычисления системы линейных уравнений.
Но, для этой задачи, можно получить решение без использования средств вычислительной техники.
Эффективный способ решения задачи
Мы воспользуемся тем, что уравнения равновесия можно составлять не единственным способом. Можно произвольным образом выбирать систему координат и оси, относительно которых вычисляются моменты. Иногда, за счет выбора осей, можно получить уравнения, которые решаются более просто.
Воспользуемся тем, что, в равновесии, сумма моментов сил относительно любой оси равна нулю. Возьмем ось AD . Сумма моментов сил относительно этой оси равна нулю:
(П7) .
Далее заметим, что все силы, кроме пересекают эту ось. Поэтому их моменты равны нулю. Не пересекает ось AD только одна сила . Она также не параллельна этой оси. Поэтому, чтобы выполнялось уравнение (П7), сила N 1 должна равняться нулю:
N 1 = 0 .
Теперь возьмем ось AQ . Сумма моментов сил относительно нее равна нулю:
(П8) .
Эту ось пересекают все силы, кроме . Поскольку сила не параллельна этой оси, то для выполнения уравнения (П8) необходимо, чтобы
N 3 = 0 .
Теперь возьмем ось AB . Сумма моментов сил относительно нее равна нулю:
(П9) .
Эту ось пересекают все силы, кроме , и . Но N 3 = 0 . Поэтому
.
Момент от силы относительно оси равен произведению плеча силы на величину проекции силы на плоскость, перпендикулярную оси. Плечо равно минимальному расстоянию между осью и прямой, проведенной через вектор силы. Если закручивание происходит в положительном направлении, то момент положителен. Если в отрицательном – то отрицательный. Тогда
.
Отсюда
kН .
Остальные силы найдем из уравнений (П1), (П2) и (П3). Из уравнения (П2):
N 6 = 0 .
Из уравнений (П1) и (П3):
kН ;
kН
Таким образом, решая задачу вторым способом, мы использовали следующие уравнения равновесия:
;
;
;
;
;
.
В результате мы избежали громоздких расчетов, связанных с вычислениями моментов сил относительно осей координат и получили линейную систему уравнений с диагональной матрицей коэффициентов, которая сразу разрешилась.
N 1 = 0 ; N 2 = 14,0 kН ; N 3 = 0 ; N 4 = -2,3 kН ; N 5 = 38,6 kН ; N 6 = 0 ;
Знак минус указывает на то, что сила N 4 направлена в сторону, противоположную той, которая указана на рисунке.
Автор: Олег Одинцов . Опубликовано: 13-11-2017
iSopromat.ru

Рассмотрим условия равновесия произвольной плоской и пространственной систем сил, включая три основные формы и частные случаи равновесия для систем параллельных и сходящихся сил:
Из основной теоремы статики следует, что любая система сил и моментов, действующих на твердое тело, может быть приведена к выбранному центру и заменена в общем случае главным вектором и главным моментом.
Если система уравновешена, то получаем условия равновесия: R=0, MO=0. Из этих условий для пространственной системы сил получается шесть уравнений равновесия, из которых могут быть определены шесть неизвестных:
Формы условий равновесия
Первая форма
Для плоской системы сил (например, в плоскости Oxy) из этих уравнений получаются только три:
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно. Это первая форма уравнений равновесия.
Вторая форма
Уравнения равновесия могут быть записаны иначе:
Это вторая форма уравнений равновесия, причем ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
Третья форма
Это третья форма уравнений равновесия, причем точки A, B и C не должны лежать на одной прямой.
Предпочтительность написания форм уравнений равновесия зависит от конкретных условий задачи и навыков решающего.
Другие условия равновесия
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):
Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
Для системы сходящихся сил (линии действия которых пересекаются в одной точке) можно написать три уравнения для пространственной системы:
и два уравнения для плоской системы:
В каждом из вышеприведенных случаев число неизвестных, находимых при решении уравнений, соответствует числу записанных уравнений равновесия.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Уравнения равновесия пространственной системы сил
Выше (6.5, случай 6) было установлено, что
| Геометрической формой условия равновесия произвольной пространственной системы сил является равенство нулю ее главного вектора и главного момента |
 (6.18)
(6.18)
Учитывая, что  ,
,  , спроектируем формулы (6.18) на Декартовы оси координат. Имеем аналитическую форму уравнений равновесия произвольной пространственной системы сил:
, спроектируем формулы (6.18) на Декартовы оси координат. Имеем аналитическую форму уравнений равновесия произвольной пространственной системы сил:

 (6.19)
(6.19)
Последние три уравнения имеют место из-за того, что проекция момента силы относительно точки на ось, которая проходит через эту точку, равна моменту силы относительно оси (формула (6.9)).
| Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил системы на три координатные оси и суммы моментов всех сил системы относительно этих координатных осей равнялись нулю. |
Вывод. При решении задач на равновесие произвольной пространственной системы сил, которая приложена к твердому телу, мы должны составить шесть уравнений равновесия (6.19), потому имеем возможность с помощью этих уравнений определить шесть неизвестных величин.
Рассмотрим случай пространственной системы параллельных сил. Систему координат выберем так, чтобы ось Оz была параллельна линиям действия сил (рис. 6.11).
 Рисунок 6.11 Рисунок 6.11 | Если система сил находится в равновесии, то имеют место уравнения (6.19). Система сил, показана на рис. 6.11, является упрощенным вариантом произвольной пространственной системы сил, потому и уравнения (6.19) должны упроститься. Выясним, какие из уравнений (6.19) в данном случае выполняются тождественно, то есть является лишними. Такими является: – суммы проекций сил на оси Оx и Оy, потому что силы  им перпендикулярны; – сумма моментов сил относительно оси Оz, потому что силы параллельны ей (п. 6.3. Рекомендации для практического занятия). им перпендикулярны; – сумма моментов сил относительно оси Оz, потому что силы параллельны ей (п. 6.3. Рекомендации для практического занятия). |
Таким образом, остались три уравнения:
 (6.20)
(6.20)
| Для равновесия параллельной пространственной системы сил необходимо и достаточно, чтобы: – сумма проекций сил системы на ось параллельную силам равнялась нулю; – суммы моментов сил системы относительно двух других осей равнялись нулю. |
Вывод. При решении задач на равновесие параллельной пространственной системы сил, которая приложена к твердому телу, мы должны составить три уравнения равновесия и имеем возможность с помощью этих уравнений определить три неизвестных величины.
На первой лекции по разделу «Статика» мы выяснили, что имеют место шесть разновидностей систем сил, которые могут встретиться в Вашей практике инженерных расчетов. Кроме того есть две возможности расположения пар сил : в пространстве и в плоскости. Сведем все уравнения равновесия для сил и для пар сил в одну таблицу (табл. 6.2), в которой в последней колонке отметим количество неизвестных величин, которые позволит определить система уравнений равновесия.
Таблица 6.2 – Уравнения равновесия разных систем сил
| Вид системы сил | Уравнения равновесия | Количество определяемых неизвестных |
Сходящаяся плоская  |  | |
Параллельная плоская (  оси 0у) оси 0у)  |  т. А – произвольная, принадлежащая плоскости 0ху т. А – произвольная, принадлежащая плоскости 0ху | |
Произвольная плоская (в плоскости 0ху)  |  т. А – произвольная, принадлежащая плоскости 0ху т. А – произвольная, принадлежащая плоскости 0ху |
Продолжение таблицы 6.2
Система пар в плоскости  |  |
Сходящаяся пространственная 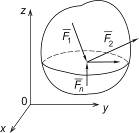 |  |
Параллельная пространственная (  оси 0z) оси 0z) 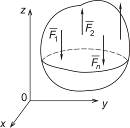 |  |
Продолжение таблицы 6.2
Произвольная пространственная 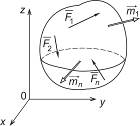 |  |
Система пар в пространстве 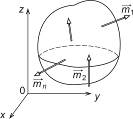 |  |
Вопросы для самоконтроля по теме 6
1. Как найти момент силы относительно оси?
2. Какая зависимость существует между моментом силы относительно точки и моментом этой же силы относительно оси, которая проходит через эту точку?
3. В каких случаях момент силы относительно оси равен нулю? А когда он наибольший?
4. В каких случаях система сил приводится к равнодействующей?
5. В каком случае пространственная система сил приводится:
– к динамическому винту?
6. Что называется инвариантом статики? Какие Вы знаете инварианты статики?
7. Запишите уравнения равновесия произвольной пространственной системы сил.
8. Сформулируйте необходимое и достаточное условие равновесия параллельной пространственной системы сил.
9. Изменится ли главный вектор системы сил при изменении центра приведения? А главный момент?
Тема 7. ФЕРМЫ. ОПРЕДЕЛЕНИЕ УСИЛИЙ
http://isopromat.ru/teormeh/obzornyj-kurs/uravnenia-ravnovesia-sistemy-sil
http://helpiks.org/7-41839.html