Передаточные функции разомкнутой и замкнутой системы
1) Замкнутые системы – это САР с обратной связью, в которых регулируемый параметр непрерывно измеряется и сравнивается с задающим воздействием (рис.3.6.1).
Рис. 3.6.1 Структурная схема замкнутой САР
Если разорвать главную обратную связь (рис.3.6.1), то получим разомкнутую систему, состоящую из последовательного соединения объекта с передаточной функцией Wo(p) и регулятора с передаточной функцией Wp(p).

|

|
 g(t) u(t) y(t)
g(t) u(t) y(t)
Рис. 3.6.2 Структурная схема разомкнутой САР
Передаточная функция разомкнутой системы по задающему воздействию находится путём перемножения передаточных функций всех звеньев прямой цепи регулирования.
Так для рис.3.5.2 передаточная функция разомкнутой системы имеет вид:
Передаточная функция замкнутой системы (рис.3.6.1) находится из выражения:
 ,
,
где W(p)- передаточная функция разомкнутой системы,
M(p),N(p),D(p)- полиномы от комплексной переменной р.
Характеристическим уравнением разомкнутой (замкнутой) системы называется полином знаменателя передаточной функции разомкнутой (замкнутой) системы, приравненный нулю (N(p)=0, D(p)=0).
Передаточная функция разомкнутой системы. Передаточная функция замкнутой системы. Дифференциальное уравнение системы
Страницы работы


Фрагмент текста работы
Методические указания к практическим занятиям
Оглавление.
2. Передаточная функция разомкнутой системы……………………. 4
3. Передаточная функция замкнутой системы………………………. 4
4. Дифференциальное уравнение системы…………………………….4
5. Структурная схема замкнутой системы…………………………….5
9. Переходная характеристика…………………………………………9
11. Асимптотическую ЛАЧХ и ЛФЧХ………………………………..11
12. Анализ устойчивости системы методом Рауса – Гурвица……….13
13. Анализ устойчивости системы методом Михайлова…………….14
14. Анализ устойчивости системы методом Найквиста……………..16
15. Анализ устойчивости системы при помощи ЛАЧХ и ЛФЧХ…. 17
16. Запас устойчивости……………………………………………. …20
По заданным нулю и пяти полюсам передаточной функции разомкнутой системы автоматического регулирования выполнить следующие задания:
· Записать функцию разомкнутой системы
· Записать функцию замкнутой системы
· Записать дифференциальное уравнение системы
· Начертить структурную схему замкнутой системы
· Определить АЧХ системы
· Определить ФЧХ системы
· Определить переходную характеристику
· Определить весовую функцию
· Построить асимптотическую ЛАЧХ и ЛФЧХ
· Проанализировать устойчивость системы методом Рауса – Гурвица
· Проанализировать устойчивость системы методом Михайлова
· Проанализировать устойчивость системы методом Найквиста
· Проанализировать устойчивость системы при помощи ЛАЧХ и ЛФЧХ
· Определить запас устойчивости
2. Запишем передаточную функцию разомкнутой системы:
 ,
,
Подставив значения корней и полюсов, получим:
 , раскрывая скобки:
, раскрывая скобки:
 .
.
3. Запишем передаточную функцию для замкнутой системы:
Переход от разомкнутой системы к замкнутой осуществим по формуле:  или
или  , подставляя передаточную функцию разомкнутой системы, получим:
, подставляя передаточную функцию разомкнутой системы, получим:
 , или
, или
 .
.
4. Запишем дифференциальное уравнение для замкнутой системы:
Передаточную функцию можно представить как отклик  на воздействие
на воздействие  , при этом оператор
, при этом оператор  , учитывая вышесказанное, запишем дифференциальное уравнение:
, учитывая вышесказанное, запишем дифференциальное уравнение:
 .
.
5. Нарисуем структурную схему замкнутой системы:
Структурная схема замкнутой системы представляет собой разомкнутую систему, охваченную отрицательной обратной связью. Разомкнутая система представляет собой каскадное соединение различных звеньев. Учитывая вышесказанное, нарисуем структурную схему замкнутой системы:
 .
.

Где  — форсирующее звено;
— форсирующее звено;
 и
и  — апериодические звенья 1-го порядка;
— апериодические звенья 1-го порядка;
 — колебательное звено 2-го порядка;
— колебательное звено 2-го порядка;
 — идеальное интегрирующее звено.
— идеальное интегрирующее звено.
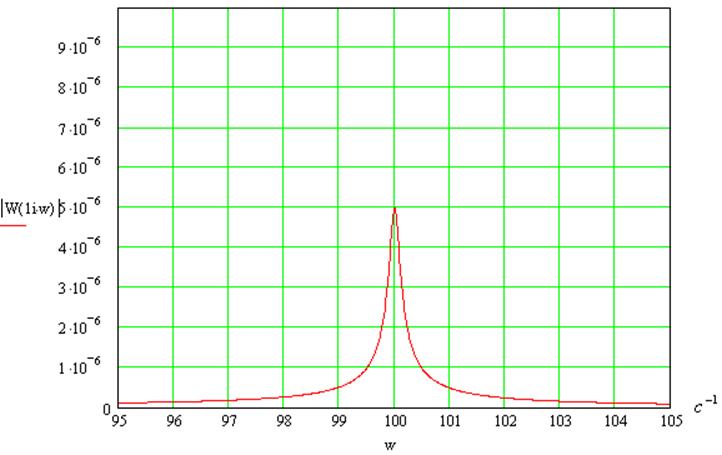
6. Амплитудно-частотная характеристика системы:
Передаточная функция системы в частотной области может быть получена заменой  на
на  :
:


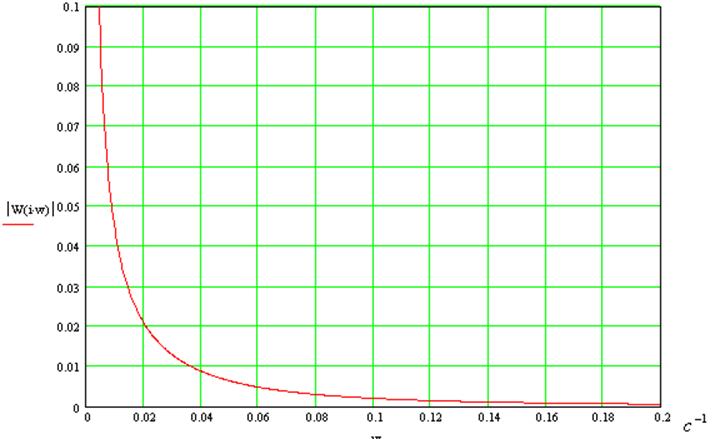
В области резонанса:
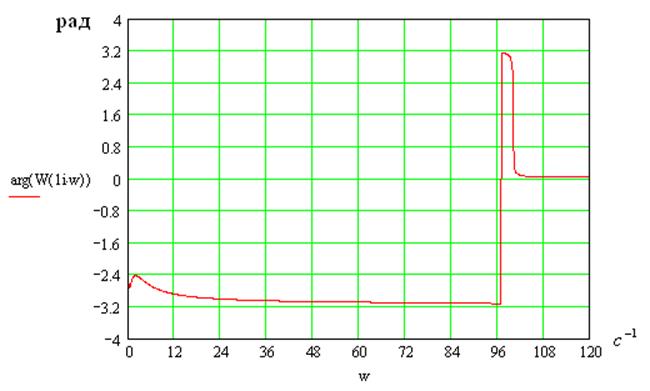
7. Фазо-частотная характеристика системы
 [рад]
[рад]
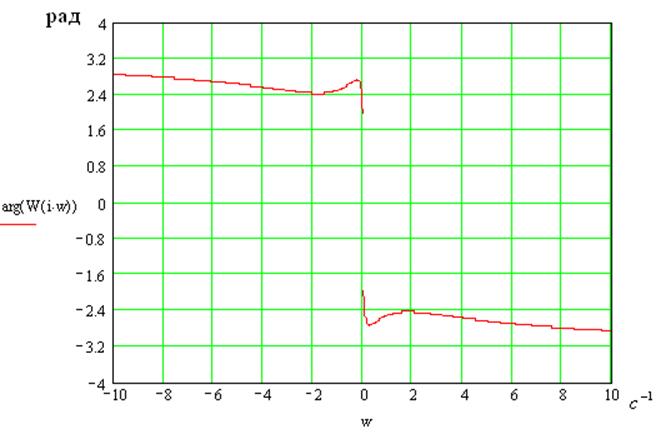
В области резонанса:
8. Амплитудно-фазовая характеристика системы:
Найдем реальную и мнимую части передаточной функции. Домножим числитель и знаменатель на комплексно сопряженное выражение
 , получим:
, получим:
 :
:
 :
:
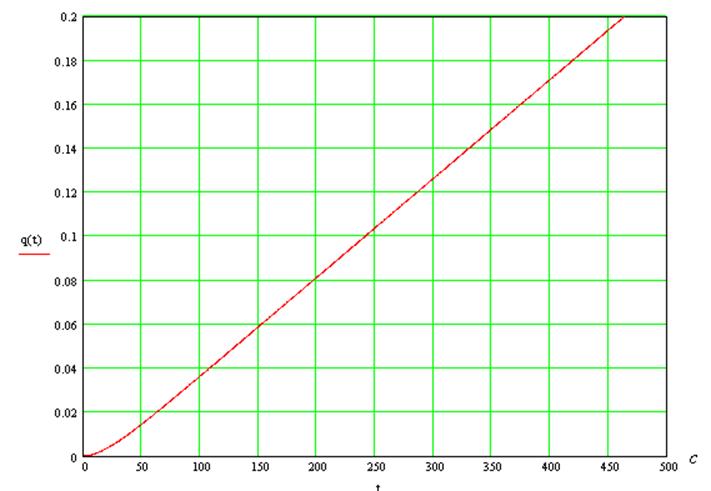
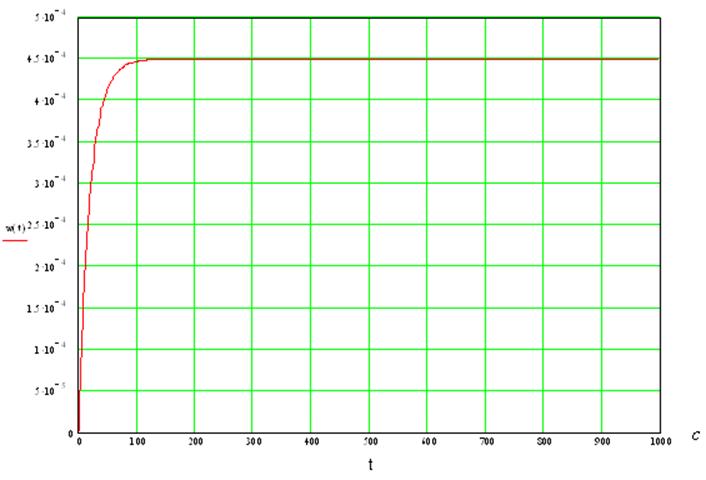
9. Определим переходную характеристику системы:
Переходная характеристика может быть выражена через передаточную функцию системы следующим образом:
 , найдя оригинал от
, найдя оригинал от  , получим:
, получим:

10. Определим весовую функцию, которая может быть выражена через передаточную функцию следующим образом:

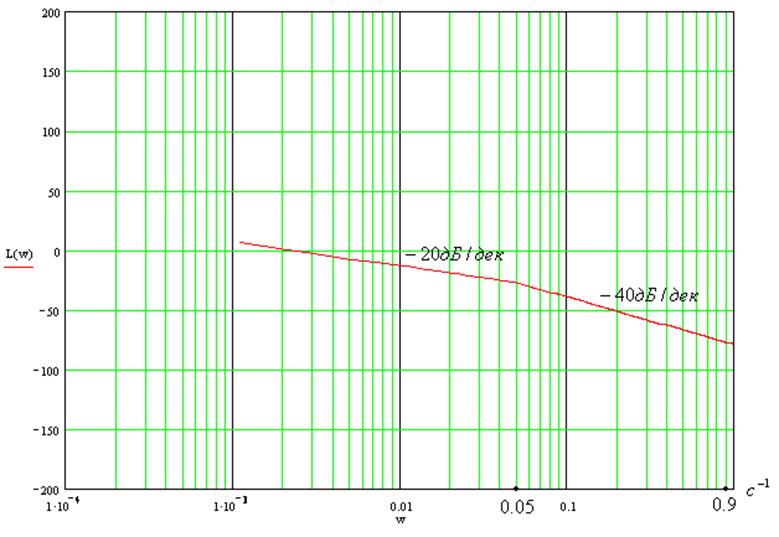
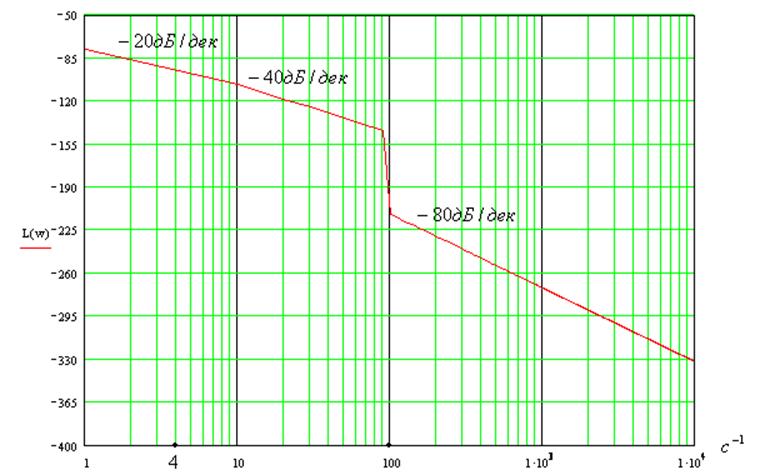
11. Найти и построить асимптотическую ЛАЧХ и ЛФЧХ:

, запишем в другом виде:
 — колебательное звено 2-го порядка.
— колебательное звено 2-го порядка.
 ;
;
 ;
;
 ;
;
 .
.
 ,
,  ,
,  ,
,  ;
;
Тогда асимптотическую ЛАЧХ можно разбить на следующие интервалы:
При  :
:
 ;
;
При  :
:
 ;
;
При  :
:
 ;
;
При: 
 ;
;
При  :
:
 ;
;
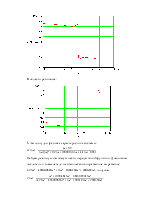
График асимптотической ЛАЧХ:
 12. Проанализируем устойчивость системы методом Рауса — Гурвица:
12. Проанализируем устойчивость системы методом Рауса — Гурвица:
Для того чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы все определители Гурвица имели знаки, одинаковые со знаком первого коэффициента характеристического уравнения а0, т. е. при а0> 0 были положительными.
Рассчитаем определители, если характеристическое уравнение системы
 , тогда:
, тогда:
 ;
;
 ;
;
 ;
;
Так как все определители положительны, система устойчива.
13. Проанализируем устойчивость системы методом Михайлова:
Для того чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы кривая (годограф) Михайлова при изменении частоты  от 0 до
от 0 до  , начинаясь при
, начинаясь при  на вещественной положительной полуоси, обходила только против часовой стрелки последовательно п квадрантов координатной плоскости, где п — порядок характеристического уравнения.
на вещественной положительной полуоси, обходила только против часовой стрелки последовательно п квадрантов координатной плоскости, где п — порядок характеристического уравнения.

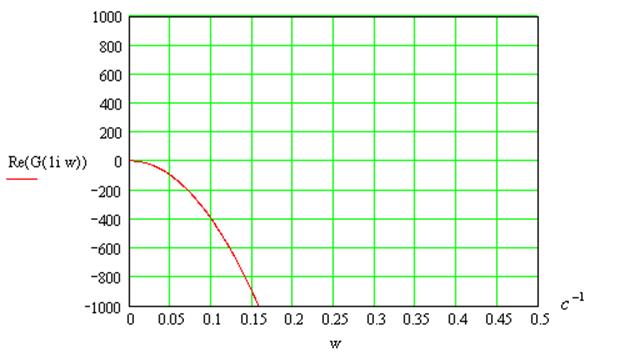

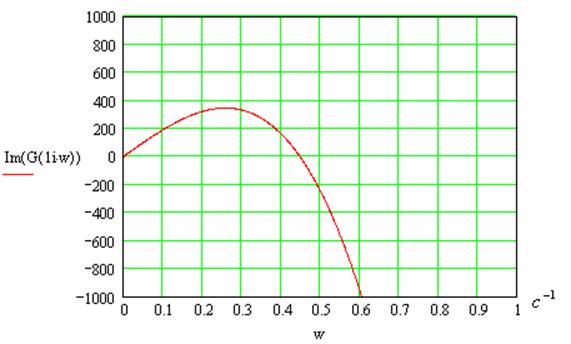
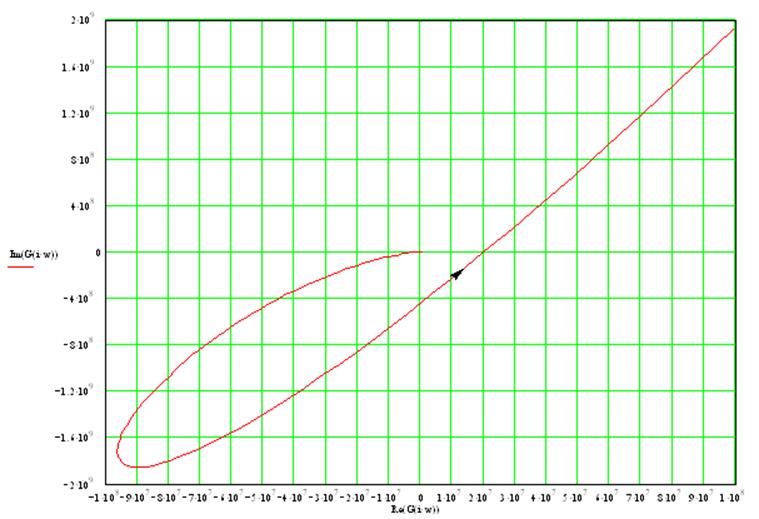
Вектор совершает поворот на 5 квадрантов, следовательно, система устойчива.
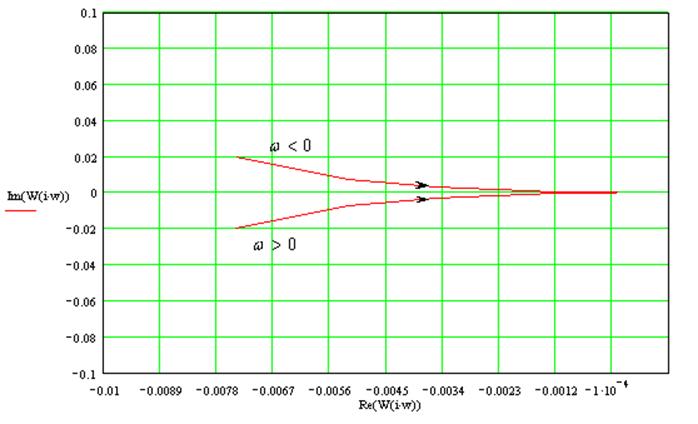
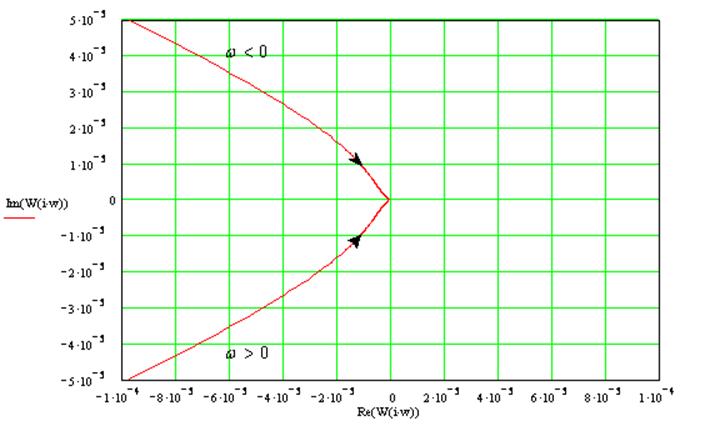
14. Проанализируем устойчивость системы методом Найквиста:
Для устойчивости астатической системы 1-го порядка необходимо и достаточно, чтобы годограф разомкнутой системы не охватывал точку -1+j0.
;
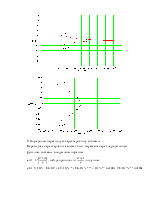
Годограф разомкнутой системы:
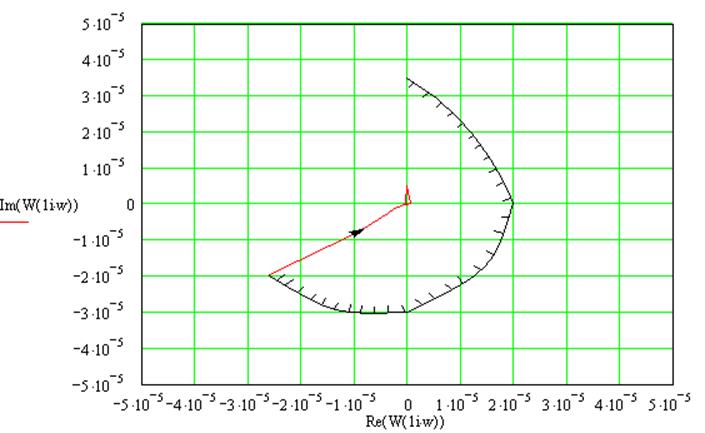
Годограф не охватывает точку -1+j0, следовательно, замкнутая система будет устойчива.
15. Анализ устойчивости по ЛАЧХ и ЛФЧХ:
Для устойчивости системы необходимо, чтобы число переходов ЛФЧХ через  при изменении от 0 до было четным, при условии, что ЛФЧХ
при изменении от 0 до было четным, при условии, что ЛФЧХ
Передаточная функция замкнутой системы относительно управляемой величины по возмущающему воздействию
Введение
Теория автоматического управления (ТАУ), — научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в системах управления техническими и технологическими объектами. ТАУ выявляет общие закономерности функционирования, присущие автоматическим системам различной физической природы, и на основе этих закономерностей разрабатывает принципы построения высококачественных систем управления.
ТАУ при изучении процессов управления абстрагируется от физи- ческих и конструктивных особенностей систем и вместо реальных систем рассматривает их адекватные математические модели. Основными методами исследования в ТАУ являются математическое моделирование, теория обыкновенных дифференциальных уравнений, операционное исчисление и гармонический анализ
Передаточные функции систем автоматического управления по задающему и возмущающему воздействиям
САУ характеризуется несколькими передаточными функциями. При одной выходной координате их количество равно числу входных (для всей системы) воздействий (рис. 1).
 |
Рис. 1. Структурная схема замкнутой САУ

Если система автоматического управления имеет несколько входных воздействий (задающих и возмущающих), то при определении передаточной функции относительно какого-либо одного из этих воздействий остальные воздействия полагают равными нулю (согласно принципу суперпозиции).
Вводится понятие передаточной функции разомкнутой системы — отношение изображения Xос(s) — сигнала главной отрицательной обратной связи xос(t) к изображению G(s) — задающего воздействия g(t).
 |
При этом контур управления предполагают разомкнутым около главного сравнивающего устройства, при равенстве нулю всех внешних воздействий, кроме задающего. Для САУ, структурная схема которой представлена на рис. 1, передаточная функция разомкнутой системы:
Вводится также понятие передаточной функции прямого участка цепи САУ от точки приложения входного воздействия до выходной ко- ординаты при равенстве нулю остальных воздействий и разрыве глав- ной отрицательной обратной связи:
 |
Передаточная функция замкнутой САУ относительно управляемой величины по задающему воздействию
Передаточная функция замкнутой системы относительно управля- емой величины x(t) по задающему воздействию g(t) — Wxg(s) может быть определена на основании правил преобразования схем. При f(t) = 0 структурная схема САУ (рис. 1) принимает вид (рис. 2):
 |
Рис. 2. Структурные схемы замкнутой САУ по задающему воздействию: а – исходная; б – эквивалентная
Тогда, согласно правилам преобразования структурных схем, пе- редаточная функция замкнутой системы относительно управляемой ве- личины x(t) по задающему воздействию g(t) равна:
 |
Передаточная функция замкнутой системы относительно управляемой величины по возмущающему воздействию
При g(t) = 0 структурная схема САУ (рис. 1) принимает вид, представленный на рис. 3.
 |
Рис. 3. Структурные схемы замкнутой САУ по возмущающему воздей- ствию: а – исходная; б – эквивалентная
Как следует из структурной схемы (рис. 3), передаточная функция замкнутой САУ относительно управляемой величины x(t) по воз- мущающему воздействию f(t) равна:

В результате исходная структурная схема САУ (рис. 1) преобра- зуется к виду (рис. 4).

Рис. 4. Эквивалентная структурная схема замкнутой САУ
В итоге изображение управляемой величины будет равно:

Таким образом, передаточная функция замкнутой системы относительно рассматриваемого воздействия – есть отношение передаточной функции прямого участка цепи от точки приложения воздействия до выходной координаты (при разомкнутой ГООС и
| пр |
| пр |
равенстве нулю остальных входных воздействий) W gx (s) либо W fx (s) к
 (1+ Wраз(s)) :
(1+ Wраз(s)) : 
http://vunivere.ru/work63531
http://poisk-ru.ru/s37067t13.html