ПЛОСКАЯ СИСТЕМА СИЛ
Плоской называется такая система сил, линии действий которых расположены в одной плоскости. При рассмотрении плоской системы сил введем определения для нагрузок. Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на твердое тело
 Плоскость, в которой расположена данная пара, называется плоскостью действия этой пары. Перпендикуляр, опущенный из точки приложения одной из сил на линию
Плоскость, в которой расположена данная пара, называется плоскостью действия этой пары. Перпендикуляр, опущенный из точки приложения одной из сил на линию
действия другой называется плечом пары (d). Действие пары сил определяется моментом пары. Численное значение момента пары определяется как произведение модуля одной из сил на плечо этой пары.

Приведем следующие два свойства пар сил:
1. Данную пару, не изменяя её действия на тело, можно переносить как угодно в плоскости её действия.
2. Не изменяя действия данной пары на тело, можно изменять модуль сил и плечо этой пары, сохраняя неизменным модуль и направление вращения пары.
 Другим важным понятием является момент силы относительно данной точки (рис. 9). Момент силы относительно данной точки равен произведению модуля силы на плечо, т.е. длину перпендикуляра, опущенного из этой точки на линию действия силы. Следовательно, будем иметь
Другим важным понятием является момент силы относительно данной точки (рис. 9). Момент силы относительно данной точки равен произведению модуля силы на плечо, т.е. длину перпендикуляра, опущенного из этой точки на линию действия силы. Следовательно, будем иметь
Момент силы считается положительным, если тело под действием данной силы стремится вращаться относительно точки О против часовой стрелки.
Отметим следующие свойства момента силы:
1. Момент силы относительно данной точки не изменяется при переносе точки приложения силы вдоль линии действия силы.
2. Момент силы относительно данной точки обращается в нуль в том случае, когда линия действия силы проходит через эту точку.
При решении задач на плоскую систему сил пользуются уравнениями равновесия. Для равновесия плоской системы сил необходимо и достаточно, чтобы сумма проекций этих сил на две координатные оси и сумма моментов относительно произвольно выбранной точки равнялись нулю

Существуют и две другие формы условий равновесия, но они используются гораздо реже.
Вторая форма условий равновесия: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов этих сил относительно каких-нибудь двух центров А и В и сумма их проекций на ось, не перпендикулярную к прямой АВ, были равны нулю.
Третья форма: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительной любых трех центров А, В и С, не лежащих на одной прямой, были равны нулю.
 ;
;
 .
.
Задача 2
Лестница АВ длиной 2а и весом Р опирается на гладкий горизонтальный пол и  гладкую вертикальную стену, на которой в точке Е стоит человек весом Q. Чтобы лестница не скользила, она привязана к стене веревкой ОД. Определить реакции в точках А и В (стены и пола), а также натяжение веревки, если углы a и b, образуемые лестницей и веревкой с плоскостью пола известны и если расстояние
гладкую вертикальную стену, на которой в точке Е стоит человек весом Q. Чтобы лестница не скользила, она привязана к стене веревкой ОД. Определить реакции в точках А и В (стены и пола), а также натяжение веревки, если углы a и b, образуемые лестницей и веревкой с плоскостью пола известны и если расстояние  . Центр тяжести C лестницы находится в её середине (рис. 10).
. Центр тяжести C лестницы находится в её середине (рис. 10).
Решение: Используя принцип освобождаемости от связей, убираем связи, а их действие заменяем соответствующими реакциями. Составляем уравнения равновесия. Оси координат указаны на рис. 10.
 , (1)
, (1)
 (2)
(2)
 (3)
(3)
Из первого уравнения получаем: 
Из второго уравнения получаем: 
Подставляем значения для RA и RB в уравнение (3) и находим значение для
Задача 3
Определить опорные реакции в балочной конструкции, приведенной на
рис. 11, если Р=2 кН, q = 3 кН/м, m = 5 кНм. Размеры приведены на рис.11.
Решение: Используем принцип освобождаемости от связей, для чего вместо связей укажем их реакции (рис. 11, а). Указав оси координат для расчетной схемы, составляем уравнения равновесия. В данной задаче имеется три составляющих неизвестных опорных реакций, следовательно, необходимо составить три уравнения равновесия.
Распределенная нагрузка, т.е. нагрузка приходящаяся на единицу длины, задается интенсивностью q= Н/см. Грузовая нагрузка, которая представляется как сосредоточенная сила равна Q=q∙ℓ, прикладывается в центре тяжести фигуры, образованной распределенной нагрузкой.
 , (1)
, (1)
 (2)
(2)
При составлении третьего уравнения нужно учесть следующие два правила:
1. Момент от распределенной нагрузки равен, взятой с соответствующим знаком, площади грузовой нагрузки, умноженной на расстояние от центра тяжести грузовой нагрузки до рассматриваемой точки, относительно которой берется момент.
2. Если сила расположена под углом к координатным осям, то её необходимо разложить по проекциям на эти оси, а затем определять момент от каждой проекции в отдельности
 (3)
(3)
Момент следует брать относительно той точки, в которой сходятся большее количество неизвестных опорных реакций. Из полученных уравнений определяем неизвестные опорные реакции в следующем порядке:
из уравнения (3): 
из уравнения (1): 
из уравнения (2): 
Следует отметить, что если при решении задач опорная реакция получилась со знаком минус, то, следовательно, её направление первоначально было выбрано неверно и его следует сменить на противоположное.
Дата добавления: 2015-12-26 ; просмотров: 5054 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
iSopromat.ru

Рассмотрим условия равновесия произвольной плоской и пространственной систем сил, включая три основные формы и частные случаи равновесия для систем параллельных и сходящихся сил:
Из основной теоремы статики следует, что любая система сил и моментов, действующих на твердое тело, может быть приведена к выбранному центру и заменена в общем случае главным вектором и главным моментом.
Если система уравновешена, то получаем условия равновесия: R=0, MO=0. Из этих условий для пространственной системы сил получается шесть уравнений равновесия, из которых могут быть определены шесть неизвестных:
Формы условий равновесия
Первая форма
Для плоской системы сил (например, в плоскости Oxy) из этих уравнений получаются только три:
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно. Это первая форма уравнений равновесия.
Вторая форма
Уравнения равновесия могут быть записаны иначе:
Это вторая форма уравнений равновесия, причем ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
Третья форма
Это третья форма уравнений равновесия, причем точки A, B и C не должны лежать на одной прямой.
Предпочтительность написания форм уравнений равновесия зависит от конкретных условий задачи и навыков решающего.
Другие условия равновесия
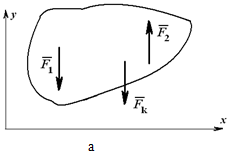
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):
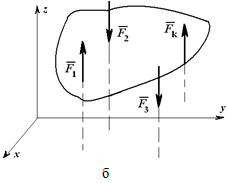
Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
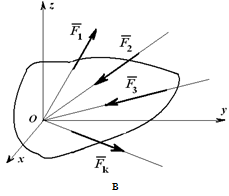
Для системы сходящихся сил (линии действия которых пересекаются в одной точке) можно написать три уравнения для пространственной системы:
и два уравнения для плоской системы:
В каждом из вышеприведенных случаев число неизвестных, находимых при решении уравнений, соответствует числу записанных уравнений равновесия.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
ПроСопромат.ру
Технический портал, посвященный Сопромату и истории его создания
Уравнения равновесия плоской системы сил
Всякая система произвольно расположенных в плоскости сил может быть приведена к главному вектору и главному моменту (см. — здесь).
Для равновесия системы сил, произвольно расположенных в плоскости, необходимо и достаточно, чтобы главный вектор и главный момент этих сил относительно любого центра каждый в отдельности равнялся нулю.
Главный вектор представляет собой геометрическую сумму всех сил, составляющих систему и перенесенных в центр приведения. Величину главного вектора можно определить через проекции на координатные оси всех сил системы.
Для равновесия необходимо, чтобы главный вектор был равен нулю.
Кроме того, для равновесия необходимо, чтобы главный момент также был равен нулю.
Таким образом, имеем уравнения:
ΣPx = 0 (сумма проекций всех сил на ось X равна 0);
ΣPy = 0 (сумма проекций всех сил на ось Y равна 0);
ΣMo =0 (сумма моментов относительно любой точки равна 0)
Данные уравнения являются уравнениями равновесия тела, находящегося под воздействием системы сил, произвольно расположенных в плоскости.
http://isopromat.ru/teormeh/obzornyj-kurs/uravnenia-ravnovesia-sistemy-sil
http://prosopromat.ru/texnicheskaya-mexanika/statika/sistema-proizvolno-raspolozhennyx-sil/uravneniya-ravnovesiya-ploskoj-sistemy-sil.html