Теоретическая механика: Решебник Яблонского:
Сложное движение (К7, К8)
Бесплатный онлайн решебник Яблонского. Выберите задание и номер варианта для просмотра решения. Смотрите также способы и примеры решения задач по темам сложное движение точки и тела и кинематика механизмов.
Задание К.7. Определение абсолютной скорости и абсолютного ускорения точки
Точка M движется относительно тела D. По заданным уравнениям относительного движения точки M и движения тела D определить для момента времени t=t1 абсолютную скорость и абсолютное ускорение точки M.
Схемы механизмов показаны на рис. 99–101, а необходимые для расчета данные приведены в табл. 34.
Примечания. Для каждого варианта положение точки M на схеме соответствует положительному значению sr; в вариантах 5, 10, 12, 13, 20–24, 28–30 OM=sr – дуга окружности; на схемах 5, 10, 12, 21, 24 OM – дуга, соответствующая меньшему центральному углу. Относительное движение точки M в вариантах 6 и 27 и движение тела D в вариантах 23 и 29 определяются уравнениями, приведенными в последнем столбце табл. 34.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание К.8. Определение угловых скоростей звеньев планетарного редуктора
Найти угловые скорости ведомого вала II и сателлитов редуктора. Схемы редукторов показаны на рис. 104–106, необходимые для расчета данные приведены в табл. 36.
Примечания. Положительный и отрицательный знаки угловых скоростей означают соответственно направление вращения против и по часовой стрелке, если смотреть со стороны ведущего вала I (для редуктора с цилиндрическими колесами) или со стороны положительного направления соответствующей оси (для редуктора с коническими колесами).
В вариантах 26 и 28 использованы численные данные из сборника 2006 г. издания. В сборнике 1985 г. численные данные для этих двух вариантов поменяны местами относительно более нового издания, а схемы редукторов те же самые. Поэтому если вам нужно сделать подсчеты по изданию 1985 г. (или любого другого, где задания отличаются только значениями величин) – просто подставьте свои числа в формулы из решения нужного варианта.
iSopromat.ru

Пример определения для заданного момента времени абсолютной скорости и абсолютного ускорения точки по заданным уравнениям относительного движения точки и треугольника вращающегося вокруг оси.
Задача
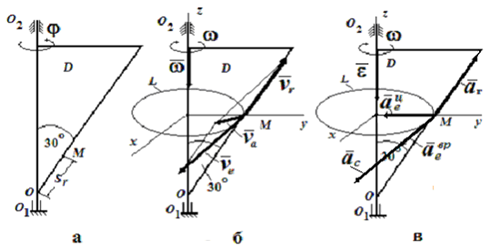
Треугольник D вращается вокруг оси O1O2 (рис. 1, а). По стороне треугольника движется точка M. По заданным уравнениям относительного движения точки M и движения треугольника D определить для момента времени t= t1 абсолютную скорость и абсолютное ускорение точки M.
Решение
Точка M совершает сложное движение. Движется относительно треугольника D и вместе с треугольником вращается вокруг оси O1O2. Тогда движение точки относительно треугольника будет относительным, движение вместе с треугольником – переносным.
Будем считать, что в заданный момент времени плоскость чертежа совпадает с плоскостью треугольника D. Положение точки M на треугольнике D определяется расстоянием sr= OM.
Абсолютную скорость точки М найдем как геометрическую сумму относительной и переносной скоростей:
Модуль относительной скорости vr = | vr |, где
vr= dsr/dt = 24π sin(3π t) — алгебраическое значение относительной скорости.
Положительный знак у vr показывает, что вектор vr направлен в сторону возрастания sr.
Модуль переносной скорости
где R – радиус окружности L, описываемой той точкой тела, с которой в данный момент совпадает точка М;
R = srsin 30° = 10,0 см;
ωe – модуль угловой скорости тела
Отрицательный знак у величины ωe показывает, что вращение треугольника происходит вокруг оси Oz в сторону, обратную направлению отсчета угла φ. Поэтому вектор ωe направлен по оси Oz вниз (рис. 1, б).
Модуль переносной скорости по формуле (1)
Вектор ve направлен по касательной к окружности L в сторону вращения тела.
Так как ve и vr взаимно перпендикулярны, модуль абсолютной скорости точки М
Абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений
или в развернутом виде
Модуль относительного касательного ускорения

Отрицательный знак arτ показывает, что вектор arτ направлен в сторону отрицательных значений sr. Знаки vr и arτ различны, следовательно, относительное движение точки М замедленное.
Относительное нормальное ускорение

так как траектория относительного движения – прямая ( ρ = ∞).
Модуль переносного вращательного ускорения
где εе = | εе | – модуль углового ускорения тела D
Знаки εе и ωe одинаковы; следовательно, вращение треугольника D ускоренное, направления векторов εе и ωe совпадают (рис. 1, б, в).
Согласно (2) ae в = 102 см/с 2 . Вектор ae в направлен в ту же сторону, что и вектор ve.
Модуль переносного центростремительного ускорения
Вектор a ц e направлен к центру окружности L.
Модуль кориолисова ускорения
С учетом найденных выше значений ωe и vr получаем
Вектор aC направлен, согласно правилу векторного произведения, к нам — перпендикулярно плоскости треугольника D (рис. 1, в).
Модуль абсолютного ускорения точки М находим способом проекций:
Результаты расчета сведены в таблицу 1.

Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах

Решение задач, контрольных и РГР
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
По заданным уравнениям относительного движения точки


По заданным уравнениям движения точки М установить вид ее траектории и для момента времени t = t1 (c) найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Необходимые для решения данные приведены в табл. 20.
Задача К2-30 bmp
Движение груза 1 должно описываться уравнением c2t 2 +с1t+c0,
где t — время, с; c0-2 — некоторые постоянные.
В начальный момент времени (t = 0) координата груза должна быть x0, а его скорость — v0.
Кроме того, необходимо, чтобы координата груза в момент времени t = t2 была равна х2.
Определить коэффициенты c0, c1 и c2 при которых осуществляется требуемое движение груза 1. Определить также в момент времени t = t1 скорость и ускорение груза и точки М одного из колес механизма.
Схемы ферм показаны на рис. 68-70, а необходымые для расчета данные приведены в табл. 23.
Задача К3-30 bmp
Найти для заданного положнеия механизма скорости и ускорения точек В и С, а также угловую скорость и угловое ускорение звена, которому эти точки принадлежат. Схемы механизмов помещены на рис. 73 — 75, а необходимые для расчета данные приведены в табл. 25.
Задача К4-30 bmp
Кривошип О1А вращается с постоянной угловой скоростью ω O1A = 2 рад/с. Определить для заданного положения механизма:
1) скорости точек А, В, С . механизма и угловые скорости всех его звеньев с помощью плана скоростей;
2) скорости этих же точек механизма и угловые скорости звеньев с помощью мгновенных центров скоростей;
3) ускорения точек А и В и угловое ускорение звена АВ;
4) положение мгновенного центра ускорений звена АВ;
5) ускорение точки М, делящей звено АВ пополам.
Схемы механизмов показаны рис. 80-83, а необходимые для расчета данные приведены в табл. 27.
Задача К5-30
Заданы уравнени сферического движения твердого тела ψ = ψ (t), θ = θ (t) и φ = φ (t), где ψ , θ и φ — углы Эйлера (рис. 90).
Определить для момента времени t = t1 угловую скорость и угловое ускорение тела, а также скорость и ускорение точки М, координаты которой в подвижной системе, жестко связанные с телом, ξ , η , ζ .
Необходимые данные приведены в табл. 32.
Задача К6-30 bmp
Тело А катится без скольжения по поверхности неподвижного тела В, имея неподвижную точку О. Ось О ζ тела А вращается вокруг неподвижной оси Оz и имеет при заданном положении тела А угловую скорость ω 1 и угловое кскорение ε 1.
Определить угловую скорость и угловое ускорение тела А, а также скорость и ускорение точки М в указанном положении тела А.
Сехмы показаны на рис. 91-93, анеобходимые для расчета данные приведены в табл. 33.
Задача К7-30 bmp
Точка М движется относительно тела D. По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t = t1 абсолютную скорость и абсолютное ускорение точки М.
Схемы механизмов показаны на рис. 99-101, а необходимые для расчета данные приведены в табл. 34.
Задача К8-30 bmp
Найти угловые скорости ведомого вала II и сателлитов редуктора. Схемы рекукторов показаны на рис. 104-106, необходимые для расчета данные приведены в табл. 36.
Решебник сборника задач по теоретической механике Кепе О.Э.
Решебник сборника задач по теоретической механике Диевский В.А., Малышева И.А.
Решебник сборника задач по теоретической механике Тарг С.М.
Решебник сборника задач по физике Прокофьев В.Л.
Решебник сборника задач по химии Глинка Н.Л.
Решебник сборника задач по химии Шиманович И.Е.
Решебник сборника задач по материаловедению Гарбузова Н.Е.
Решебник сборника задач по технической механике Сетков В.И.


Сборник заданий
для курсовых работ по теоретической механике
Настоящий сборник состоит из 45 заданий по разделам статика,
динамика и кинематика, колебания механической системы и
аналитическая механика, утвержденные программой по курсу
теоретической механики. Отдельные задания требуют проведения
практических исследований или предусматривается необходимость
использования ЭВМ. Каждое задание разбито на 30 вариантов.
Имеются примеры правильного выполнения решения заданий.
Издание 4-ое, переработанное и дополненное.
Москва. Высшая школа1985
http://isopromat.ru/teormeh/primery-reshenia-zadach/skorost-i-uskorenie-pri-sloznom-dvizenii-tocki
http://www.zachet.ca/termech/jablonsky/jablonsky_K30.php