Ограниченный метод Хартри-Фока. Уравнения Рутана.
До сих пор развиваемая теория оставалась общей в том смысле, что не зависела от типа рассматриваемых молекул. Если считать, что в молекуле четное число электронов и число электронов со спином α равно числу электронов со спином β, т.е. Nα/2 = Nβ/2 = n. Кроме того, предположим, что все электроны спарены, т.е. пары электронов занимают одну и ту же пространственную орбиталь, различаясь только спином. Качество этого приближения ухудшается при растяжении связей и, наконец, нарушается при диссоциации связи, когда электронам энергетически выгоднее находиться в неспаренном состоянии. Такой тип молекул в действительности очень распространен и называется молекулами с замкнутыми (закрытыми) электронными оболочками. Тогда уравнения Хартри-Фока сводятся к более простому виду:

Уравнение Хартри-Фока, в принципе, позволяет найти волновые функции многоэлектронной системы, однако в случае молекул его прямое решение все еще оказывается весьма сложным. Для описания молекулярных систем требуется сделать дополнительные упрощения. Будем искать одноэлектронные функции многоэлектронной системы в виде линейной комбинации одноэлектронных функций центрированных на ядрах атомов (атомных орбиталей). Это приближение называется приближением «Молекулярная Орбиталь – Линейная Комбинация Атомных Орбиталей», или МО-ЛКАО.
Тогда можно показать, что выражение (2.46) можно представить в виде системы линейных уравнений (уравнения Рутана):

или в матричном виде:
FC=SCε,(2.51)
Здесь матрица F— т.н. оператор Фока(фокиан).Матрица Pназывается матрицей плотности, S –называются интегралами перекрывания, χi — базисные функции, центрированные на ядрах атомов, r— векторы пространственных координат электронов. Величины εi называются одноэлектронными энергиями или энергией молекулярной орбиталиi. Можно показать, что энергия МО с точностью до знака равна энергии удаления электрона с данной МО (т.е. потенциалу ионизации с данной МО) при условии, что орбитали системы в ходе этого процесса рассматриваются как неизменные (Теорема Кумпанса).
Решение уравнения Рутана (2.51) генерирует набор коэффициентов cij, которые являются коэффициентами разложения молекулярной орбитали φi (ri)по базисным функциям (атомным орбиталям) χ (ri).
Однако, уравнения Рутана имеют еще одну сложность — фокиан зависит от матрицы плотности, которая, в свою очередь определяется через cij — т.е. через решения самих уравнений Рутана. Чтобы выйти из этого заколдованного круга, В.А. Фок предложил решать уравнения (2.48) с помощью итерационной процедуры, которая получила название процедуры самосогласования. Сам метод Хартри-Фока часто называют методом самосогласованного поля (ССП). В соответствие с этой процедурой вначале выбирается некая приближенная матрица плотности и формируется начальный фокиан. Затем решаются уравнения (2.51) и находится новая (уже более точная) матрица плотности.
Процессу самосогласования посвящено большое количество специальных научных исследований. В настоящее время выработаны специальные алгоритмы (конвергеры), позволяющие ускорить сходимость процедуры ССП или добиться самосогласования для систем с плохой сходимостью. Наиболее простым методом является сдвиг виртуальных орбиталей на некоторую энергию dE вверх, так, что энергетическая щель между занятыми и виртуальными орбиталями увеличивается. Более сложным способом являются известные и часто применяемые процедуры DIIS и SOSCF, которые во многих случаях дают более высокое ускорение сходимости. Большинство современных квантовохимических программ позволяет произвольно использовать тот или иной конвергер по желанию пользователя. Следует, однако, помнить, что до настоящего времени нет универсальной процедуры, гарантирующей сходимость процедуры самосогласования во всех случаях.
Дата добавления: 2019-10-16 ; просмотров: 784 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Ограниченный метод Хартри-Фока . Уравнения Рутана .
Лекции 9-10.
АКТУАЛЬНЫЕ ЗАДАЧИ И СТРУКТУРА СОВРЕМЕННОЙ КВАНТОВОЙ ХИМИИ.
I. Обзор современных квантово-химических методов
1. Квантово-химическая модель
2. Метод Хартри-Фока
2.1. Основные приближения
2.2. Вариационный принцип
2.3. Правила Слейтера
2.4. Уравнения Хартри-Фока
2.5. Ограниченный метод Хартри-Фока. Уравнения Рутана.
2.6. Неограниченный метод Хартри-Фока
3. Методы конфигурационного взаимодействия
3.1. Разложение волновой функции в конфигурационный ряд
3.2. Метод конфигурационного взаимодействия
3.3. Классификация корреляционной энергии на основе метода КВ
3.5. Метод обобщенных валентных связей (GVB)
4. Методы, основанные на теории возмущений
5. Метод связанных кластеров и родственные методы
6. Теория функционала плотности
7. Полуэмпирические методы
II. Развитие методов квантовой химии
I . Обзор современных квантово — химических методов
Квантово — химическая модель
Математической моделью называется упрощенное математическое описание системы, в котором исключены незначительные и сложные детали и учитываются только главные свойства моделируемого объекта. Одной из наиболее распространенных моделей изолированной молекулы является нерелятивистское стационарное многоэлектронное уравнение Шредингера в приближении Борна-Оппенгеймера:
ĤΨ(r) = EΨ(r)
Здесь Ψ(r) — волновая функция, зависящая явно от координат всех электронов r и не зависящая от координат ядер; Ĥ — нерелятивистский гамильтониан молекулы.
Эта модель не учитывает релятивистского увеличения массы электронов, влияния электронов на движение ядер и влияние внешней среды на поведение отдельной молекулы. В то же время она учитывает наиболее значимые молекулярные энергетические эффекты — взаимодействие электронов с ядрами молекулы и взаимное отталкивание электронов. Эта модель может быть упрощена или усложнена. Например, можно считать, что электроны двигаются независимо друг от друга — т.е. многоэлектронная волновая функция является произведением одноэлектронных функций (приближение Хартри), что сильно упростит вычисления, но сделает результат значительно более грубыми.
Особенностью моделей, используемых при моделировании молекулярных систем, является невозможность их точного аналитического решения. В отличие от многих простых математических моделей, модели молекулярных систем могут быть решены точно только для тривиальных систем, (например, атома H, молекулярного иона водорода H2 + ). Для всех практически значимых химических систем решение соответствующих электронных уравнений возможно только приближенно.
Квантово — химической моделью называется способ получения электронной энергии молекулы и ее волновой функции (матрицы плотности), не зависящий от размера системы и молекулярной структуры и определяемый:
1. Математической моделью явления.
2. Теоретической процедурой решения уравнений, соответствующих модели.
3. Базисом атомных орбиталей.
Квантово-химическая модель обязана подчиняться следующим принципам:
1. Уникальность решения . Она дает уникальное (хотя и приближенное) решение уравнения Шредингера для заданной конфигурации ядер, электронного и спинового состояния молекулы.
2. Трансферабельность. Она применима к химической системе произвольного размера и с произвольной молекулярной структурой (хотя согласие результатов расчета с экспериментом и практическая осуществимость такого расчета может зависеть от конкретных параметров системы).
3. Точность. В идеале модель должна давать высокоточные количественные результаты, совпадающие с экспериментом в пределах экспериментальной погрешности. Как минимум, модель должна предсказывать качественные закономерности для групп молекулярных систем.
4. Вычислительная эффективность . Расчеты в рамках данной модели должны быть осуществимы с использованием современных компьютерных технологий. Не каждая квантово-химическая модель удовлетворяет всем перечисленным принципам. Характеристики конкретных современных квантово-химических моделей будут рассмотрены далее.
5. Воспроизведение точных результатов соответствующей N-электронной задачи. Квантово-химический метод, явно учитывающий взаимодействие n-электронов должен давать такое решение, которое совпадает с точным решением уравнения Шредингера для n-электронной задачи, допускающей точное (аналитическое) решение.
Метод Хартри-Фока
Основные приближения
Рассмотрим изолированную молекулу, не испытывающую внешних воздействий. Для ее описания используем следующую модель:
1. Учитывается только притяжения электронов к ядрам и отталкиванием электронов друг от друга;
2. Состояние молекулы стационарно (ее энергия E не зависит от времени);
3. Ядра атомов неподвижны и их координаты R точно определены (адиабатическим приближением).
С учетом сделанных предположений, волновая функция молекулы Ψ зависит только от координат электронов и подчиняется стационарному уравнению Шредингера:
ĤΨ(r) = EΨ(r)
Поскольку мы пренебрегли всеми взаимодействиями, за исключением взаимодействием электронов с ядрами и электронов друг с другом, гамильтониан молекулы Ĥ включает только три члена: кинетическую энергию электронов, притяжение электронов к ядрам атомов и отталкивание электронов между собой. Тогда гамильтониан молекулы есть сумма двух членов
Однако поведение системы электронов зависит от того, в каком спиновом состоянии находится каждый из них. Пусть отдельный (например, изолированный) электрон i описывается волновой функцией φ:
Здесь ri — пространственные (например, декартовы) координаты электрона i, σi — его спиновая переменная. Т.к. проекция спина электрона sz может принимать только два значения (+ħ/2 и –ħ/2), то спиновая переменная также принимает только два значения (назовем их, соответственно, α и β).
Сделаем еще одно предположение, которое, строго говоря, является приближением: допустим, что спин и пространственные переменные независимы и волновую функцию отдельного электрона можно представить в виде произведения двух независимых функций:
Здесь ης(σ) — спиновая волновая функция электрона со спином ς , т.е. волновая функция, определяющая вероятность обнаружить данный электрон со спином σ=ς. Мы не знаем явный вид этой функции, но очевидно, что она может принимать только строго определенные значения.
Смысл записи (2.8) состоит в том, что пространственная вероятность обнаружения электрона i описывается квадратом модуля функции φi(r), а его проекция спина в этом состоянии +1/2ħ (т.е. α). Одноэлектронные волновые функции вида (2.7), являющиеся решением молекулярного уравнения Шредингера, называются спин — орбиталями, а их пространственные компоненты φ(r) — одноэлектронными орбиталями молекулы.
С учетом сделанных обозначений стационарное уравнение Шредингера (2.1) следует записать в виде:
где qi=(ri,σi) — совокупность пространственных и спиновых переменных электрона i. Вид оператора Ĥ при этом совершенно не изменяется, и он по-прежнему действует только на пространственные координаты электронов. Спиновая часть волновой функции является для операторов ĥ и Ĝ просто постоянным множителем, который можно вынести за скобки. Эта часть, однако, будет иметь значение при проведении интегрирования по всем координатам электронов, включая спиновые переменные.
Наша задача состоит в нахождении волновой функции Ψ(q1, q2, … qN) из уравнения (2.10), в котором гамильтониан Ĥ задан формулами (2.2)-(2.5). Это уравнение является 3N-мерным дифференциальным уравнением второго порядка в частных производных, решение которого требует дальнейших упрощений.
Важное приближение, позволяющее значительно упростить уравнение (2.10) было предложено английским физиком Д. Хартри. Многоэлектронная волновая функция Ψ(q1, q2, … qN) представляет собой произведение функций, зависящих от координат только одного электрона:
Оно соответствует системе, в которой все электроны движутся независимо друг от друга, что в случае молекулы, конечно же, неверно. Приближение Хартри также не подчиняется принципу Паули, который гласит, что волновая функция, описывающая состояния электронов, должна менять знак при перестановке координат любых двух электронов. Выход из этой ситуации был предложен советским физиком В.А. Фоком и одновременно американским физиком Дж. Слейтером: необходимо подействовать на функцию специальным оператором (т.н. оператором антисимметризации A), который превращает любое произведение функций в антисимметричную относительно перестановки двух электронов.
В соответствие с физическим смыслом волновой функции на функцию (2.15) должно быть наложено еще одно физическое условие — условие нормировки:

которое означает, что вероятность обнаружить любой из N электронов молекулы во всем пространстве с любым спином равна 1.
Вариационный принцип
Энергия, соответствующая любой нормированной электронной волновой функции Ψ, которая может быть, а может и не быть точным решением уравнения Шредингера, всегда больше или равна энергии E0, соответствующей точной нормированной волновой функции основного состояния Ψ0:
Вариационный принцип имеет два очень важных следствия:
Во-первых, мы можем использовать его для нахождения точной волновой функции: варьируя пробную функцию Ψ так, чтобы добиться минимума энергии функционала (2.20), мы приближаемся к точной волновой функции.
Во-вторых, на основе вариационного принципа мы можем сравнивать качество различных приближений: если две функции получены путем вариации функционала (2.20), то более точным решением уравнения (2.1) будет та, которая дает меньшую энергию.
Правила Слейтера
Для того, чтобы развивать дальнейшую теорию, необходимо разработать приемы работы с детерминантными волновыми функциями. Существует несколько простых правил, значительно упрощающих вычисления с такими функциями. Они касаются действия единичного оператора и операторов ĥ и Ĝ на произвольные функции вида (2.18) и называются правилами Слейтера.
Уравнения Хартри-Фока
Используя вариационный принцип и правила Слейтера, можно вывести уравнения для нахождения волновых функций (2.18), удовлетворяющих стационарному электронному нерелятивистскому уравнению Шредингера (2.10). При их выводе используется математический аппарат курса вариационного исчисления.
Уравнения (2.43), (2.44) называются уравнениями Хартри-Фока.
Ограниченный метод Хартри-Фока . Уравнения Рутана .
До сих пор развиваемая теория оставалась общей в том смысле, что не зависела от типа рассматриваемых молекул. Если считать, что в молекуле четное число электронов и число электронов со спином α равно числу электронов со спином β, т.е. Nα/2 = Nβ/2 = n . Кроме того, предположим, что все электроны спарены, т.е. пары электронов занимают одну и ту же пространственную орбиталь, различаясь только спином. Качество этого приближения ухудшается при растяжении связей и, наконец, нарушается при диссоциации связи, когда электронам энергетически выгоднее находиться в неспаренном состоянии. Такой тип молекул в действительности очень распространен и называется молекулами с замкнутыми ( закрытыми ) электронными оболочками. Тогда уравнения Хартри-Фока сводятся к более простому виду:

Уравнение Хартри-Фока, в принципе, позволяет найти волновые функции многоэлектронной системы, однако в случае молекул его прямое решение все еще оказывается весьма сложным. Для описания молекулярных систем требуется сделать дополнительные упрощения. Будем искать одноэлектронные функции многоэлектронной системы в виде линейной комбинации одноэлектронных функций центрированных на ядрах атомов (атомных орбиталей). Это приближение называется приближением «Молекулярная Орбиталь – Линейная Комбинация Атомных Орбиталей», или МО — ЛКАО.
Тогда можно показать, что выражение (2.46) можно представить в виде системы линейных уравнений (уравнения Рутана):

или в матричном виде:
FC=SC ε , (2.51)
Здесь матрица F — т.н. оператор Фока (фокиан ). Матрица P называется матрицей плотности, S – называются интегралами перекрывания, χ i — базисные функции, центрированные на ядрах атомов, r — векторы пространственных координат электронов. Величины εi называются одноэлектронными энергиями или энергией молекулярной орбитали i. Можно показать, что энергия МО с точностью до знака равна энергии удаления электрона с данной МО (т.е. потенциалу ионизации с данной МО) при условии, что орбитали системы в ходе этого процесса рассматриваются как неизменные (Теорема Кумпанса).
Решение уравнения Рутана (2.51) генерирует набор коэффициентов cij, которые являются коэффициентами разложения молекулярной орбитали φ i (r i)по базисным функциям (атомным орбиталям) χ (r i).
Однако, уравнения Рутана имеют еще одну сложность — фокиан зависит от матрицы плотности, которая, в свою очередь определяется через cij — т.е. через решения самих уравнений Рутана. Чтобы выйти из этого заколдованного круга, В.А. Фок предложил решать уравнения (2.48) с помощью итерационной процедуры, которая получила название процедуры самосогласования. Сам метод Хартри-Фока часто называют методом самосогласованного поля ( ССП ). В соответствие с этой процедурой вначале выбирается некая приближенная матрица плотности и формируется начальный фокиан. Затем решаются уравнения (2.51) и находится новая (уже более точная) матрица плотности.
Процессу самосогласования посвящено большое количество специальных научных исследований. В настоящее время выработаны специальные алгоритмы (конвергеры), позволяющие ускорить сходимость процедуры ССП или добиться самосогласования для систем с плохой сходимостью. Наиболее простым методом является сдвиг виртуальных орбиталей на некоторую энергию dE вверх, так, что энергетическая щель между занятыми и виртуальными орбиталями увеличивается. Более сложным способом являются известные и часто применяемые процедуры DIIS и SOSCF, которые во многих случаях дают более высокое ускорение сходимости. Большинство современных квантовохимических программ позволяет произвольно использовать тот или иной конвергер по желанию пользователя. Следует, однако, помнить, что до настоящего времени нет универсальной процедуры, гарантирующей сходимость процедуры самосогласования во всех случаях.
2. Математическое описание систем автоматического управления
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
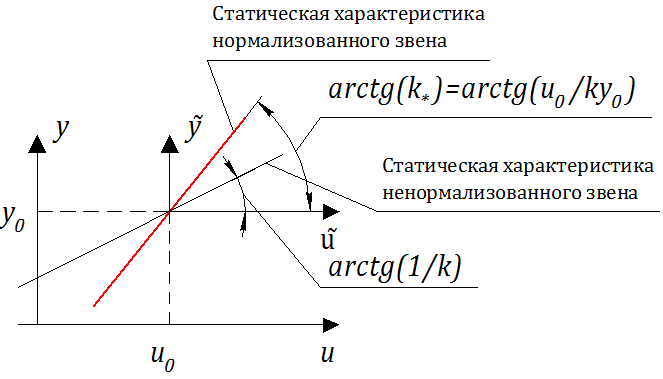
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).

где:  — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;
 — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:

где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:

где  — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):

Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть

перейдем к отклонениям от стационарного состояния:
Пусть при t>0  . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:

если  , то уравнение принимает вид:
, то уравнение принимает вид:


Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:

тогда, разделив на k, имеем:


Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:


Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [ ];
];
— коэффициент в правой части ( ): [
): [ ].
].
Тогда уравнение (2.1.6) можно записать в операторной форме:
 , что эквивалентно
, что эквивалентно

где:  — оператор диффренцирования;
— оператор диффренцирования;
 -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 — линейный дифференциальный оператор, вырожденный в константу, равную .
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:

Подставляя эти соотношения в уравнение (2.1.2), имеем:


Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие  , и, разделив на
, и, разделив на  , получаем:
, получаем:


где:  — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента 

Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
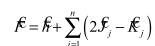
На рис. 2.1.4 представлены статические характеристики для механического демпфера:
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:

где  дифференциальные операторы.
дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или  , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:

Перенесем  в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%

где  -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:

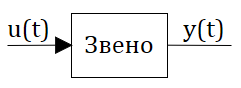
Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния  .
.
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если  , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

C учетом вышеприведенного разложение принимает вид:

Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.: ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку  , получаем:
, получаем:

Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:


Коэффициенты  — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:

где  – оператор дифференцирования;
– оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора : 
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:

Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>

Если вынести в правой части (2.2.7) коэффициент  за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:


или в операторном виде:

Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.

Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:

Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:

• во-вторых, слагаемое в левой части  — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:

Заметим, что:  .
.
Подставляя значения x(t) и y(t) в исходное уравнение:

Удаляем полученного уравнения уравнения стационара:  , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:

Вводим новые обозначения:

Получаем уравнения в «почти» классическом виде:

Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:


Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:

Переходя к полной символике, имеем: 

Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.

где:  — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_<част.>(t) $inline$ — частное решение. $inline$
y_<част.>(t) $inline$ — частное решение. $inline$
Будем называть решение однородного дифференциального уравнения  , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть  , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:

Напомним этапы решения:
1) Если имеется уравнение вида  , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:

2) Записываем характеристическое уравнение:

3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 
4) Тогда собственное решение записывается в виде:

если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:

Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:

5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения.  .
.
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:

7) Используя начальные условия (t = 0), находим значения постоянных интегрирования  . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
. Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если

Решение. Запишем однородное ОДУ: 
Характеристическое уравнение имеет вид:  ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:

где  — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем  как:
как:

Подставляя в исходное уравнение, имеем:

Суммируя  , имеем:
, имеем: 
Используя 1-е начальное условие (при t = 0), получаем:  , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
Решая систему уравнений относительно  и
и  , имеем:
, имеем: 
Тогда окончательно:

Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:

Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).
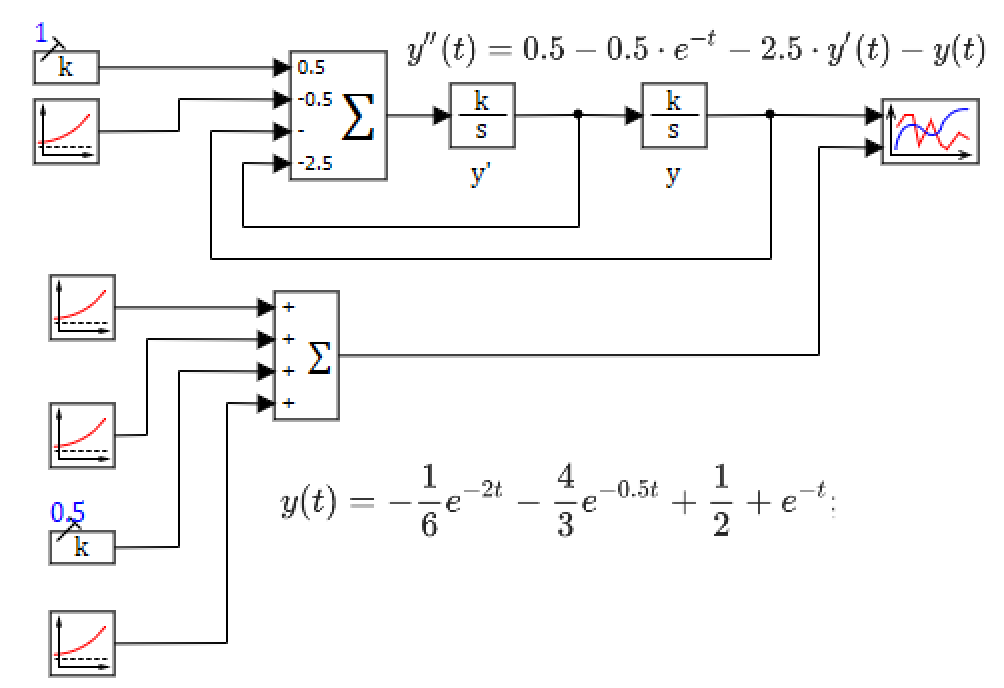
Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).
http://megaobuchalka.ru/13/48101.html
http://habr.com/en/post/506984/