Понятие импульса основное уравнение движения материальной точки
«Физика — 10 класс»
Роль законов сохранения в механике, да и в других разделах физики огромна.
Во-первых, они позволяют решать ряд практически важных задач, например, по первоначальному состоянию системы, не зная подробностей взаимодействия тел, определять её конечное состояние, зная скорости тел до взаимодействия, определять скорости этих тел после взаимодействия.
Во-вторых, и это главное, открытые в механике законы сохранения играют в природе огромную роль, далеко выходящую за рамки самой механики.
Они применимы как к телам обычных размеров, так и к космическим телам и элементарным частицам.
Вспомните, что такое импульс материальной точки.
С направлением какой из перечисленных величин совпадает направление импульса — силы, скорости или ускорения?
Второй закон Ньютона
m  =
= 
можно записать в иной форме, которая приведена самим Ньютоном в его главном труде «Математические начала натуральной философии».
Если на материальную точку действует постоянная сила, то постоянным будет и ускорение тела

где  1 — начальное значение скорости материальной точки; 2 — конечное значение скорости материальной точки.
1 — начальное значение скорости материальной точки; 2 — конечное значение скорости материальной точки.
Подставив это значение ускорения во второй закон Ньютона, получим

m2 — m1 = Δt. (4.1)
Импульс материальной точки — это физическая величина, равная произведению массы материальной точки на её скорость:
 = m. (4.2)
= m. (4.2)
Из формулы (4.2) видно, что импульс — векторная величина.
Так как m > 0, то импульс имеет такое же направление, как и скорость (рис. 4.1).

Обозначим через 1 = m1 импульс материальной точки в начальный момент времени, а через 2 = m2 — её импульс в конечный момент времени.
Тогда разность 2 — 1 = Δ есть изменение импульса материальной точки за время Δt.
Уравнение (4.1) можно записать так:
Δ = Δt.
Так как Δt > 0, то направления векторов Δ и совпадают.
Уравнение (4.3) показывает, что одинаковые изменения импульса могут быть получены в результате действия большой силы в течение малого интервала времени или малой силы за большой промежуток времени.
Произведение силы на время её действия называют импульсом силы.
Изменение импульса материальной точи равно импульсу действующей на нее силы.
Единица импульса не имеет особого названия, а её наименование получается из определения этой величины (см. формулу (4.2)):
1 ед. импульса = 1 кг • 1 м/с = 1 кг • м/с
Для нахождения импульса тела, которое нельзя считать материальной точкой, поступают так:
мысленно разбивают тело на отдельные малые элементы (материальные точки), находят импульсы полученных элементов, а потом суммируют их как векторы.
Поставьте на лист бумаги банку с водой.
Дёрните лист с большой силой так, чтобы он выскользнул из-под банки, а банка при этом осталась бы на месте.
Затем потяните лист так, чтобы банка двигалась вместе с листом.
Сравните время действия сил. Объясните, почему в первом случае банке не сообщается импульс, а во втором сообщается.
Импульс тела равен сумме импульсов его отдельных элементов.
Импульс системы тел равен векторной сумме импульсов каждого из тел системы:
= 1 + 2 + . .
Систему тел составляют взаимодействующие тела, движение которых мы рассматриваем.
Источник: «Физика — 10 класс», 2014, учебник Мякишев, Буховцев, Сотский
Законы сохранения в механике — Физика, учебник для 10 класса — Класс!ная физика
Понятие импульса основное уравнение движения материальной точки
В основе динамики материальной точки лежат законы (аксиомы) Ньютона. Напомним ключевые определения и законы.
Система отсчёта, в которой любая материальная точка, не взаимодействующая с другими телами (такая точка называется свободной), движется равномерно и прямолинейно или покоится, называется инерциальной.
инерциальные системы отсчёта (ИСО) существуют
в ИСО приращение импульса материальной точки пропорционально силе и происходит по направлению силы:
`Delta vec p = vec F * Delta t` (1)
Импульсом (или количеством движения) материальной точки называют физическую величину, определяемую произведением её массы на вектор скорости в данной системе отсчёта:
`vec p = m * vec v`.
`vec F` — сумма сил, действующих на материальную точку. Величину `vec F * Delta t` называют импульсом силы за время от `t` до `t + Delta t`, в течение которого силу можно считать неизменной по величине и направлению. Величину `Delta vec p = vec p (t + Delta t) — vec p (t)` называют приращением импульса материальной точки за время от `t` до `t + Delta t`. Поэтому второй закон Ньютона для материальной точки можно сформулировать так:
в ИСО приращение импульса материальной точки равно импульсу силы.
Отметим, что при изучении динамики второй закон Ньютона часто формулируют следующим образом:
в ИСО ускорение материальной точки прямо пропорционально сумме сил, действующих на неё, и обратно пропорционально её массе:
`vec a = vec F/m` (2)
Если масса тела остаётся неизменной, то `Delta vec p = Delta (m vec v) = m Delta vec v`, и соотношение (1) принимает вид `m Delta vec v = vec F Delta t`. С учётом `vec a = (Delta vec v)/(Delta t)` приходим к эквивалентности соотношений (1) и (2) в рассматриваемом случае.
В настоящем Задании представлены задачи, для решения которых привлекается второй закон Ньютона (см.(1)), устанавливающий равенство приращений импульса материальной точки и импульса силы.
при взаимодействии двух материальных точек сила `vecF_(12)`, действующая на первую материальную точку со стороны второй, равна по величине и противоположна по направлению силе `vecF_(21)`, действующей со стороны первой материальной точки на вторую:
1) силы возникают парами и имеют одинаковую природу, они приложены к разным материальным точкам,
2) эти силы равны по величине,
3) они действуют вдоль одной прямой в противоположных направлениях.
Заметим, что согласно третьему закону Ньютона обе силы должны быть равны по величине в любой момент времени независимо от движения взаимодействующих тел. Другими словами, если в системе двух взаимодействующих тел изменить положение одного из тел, то это изменение мгновенно скажется на другом теле, как бы далеко оно ни находилось. На самом деле скорость распространения взаимодействий конечная; она не может превзойти скорость света в вакууме. Поэтому третий закон Ньютона имеет определённые пределы применимости. Однако в классической механике при малых скоростях взаимодействующих тел он выполняется с большой точностью.
Второй закон Ньютона (уравнение движения) можно представить в виде теоремы об изменении импульса материальной точки:
Скорость изменения импульса материальной точки в инерциальной системе отсчёта равна сумме сил, действующих на эту точку.
Напомним, что для решения задач динамики материальной точки следует:
привести «моментальную фотографию» движущегося тела, указать приложенные к нему силы;
выбрать инерциальную систему отсчёта;
составить уравнение (3);
перейти к проекциям приращения импульса и сил на те или иные направления;
решить полученную систему.
Рассмотрим характерные примеры.
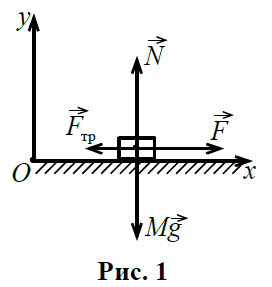
На рис. 1 показаны ИСО и силы, действующие на тело в процессе разгона. По второму закону Ньютона
`(Delta vec p)/(Delta t) = M vec g + vec N + vecF_(«тр») + vec F`.
Переходя к проекциям на горизонтальную ось, находим элементарные приращения импульса в процессе разгона
и в процессе торможения `(F = 0)`
Просуммируем все приращения импульса тела от старта до остановки:
Далее рассмотрим пример, в котором одна из сил зависит от времени.
На какое максимальное расстояние `L_max` улетит мяч, если в процессе удара футболист действует на мяч постоянной по направлению силой, величина которой изменяется по закону, представленному на рис. 2. Длительность удара τ = 8 · 10 — 3 c \tau=8\cdot10^<-3>\;\mathrm c , максимальная сила F max = 3,5 · 10 3 H F_\max=3,5\cdot10^3\;\mathrm H , масса мяча m = 0,5 кг m=0,5\;\mathrm <кг>. Здесь и далее ускорение свободного падения g = 10 м / с 2 g=10\;\mathrm м/\mathrm с^2 . Сопротивление воздуха не учитывайте.
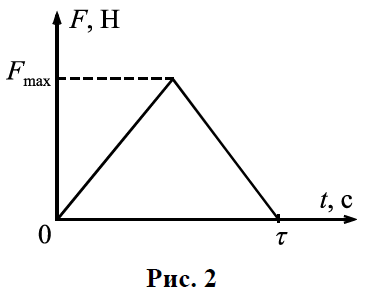
Так как `mg в импульсе силы можно интерпретировать как площадь элементарного прямоугольника со сторонами `F(t)` и `Delta t` на графике зависимости `F(t)`). Тогда импульс силы `F` за время удара равен
и в рассматриваемом случае не зависит от того, в какой именно момент времени сила достигает максимального значения (площадь треугольника равна половине произведения основания на высоту!). Далее находим импульс мяча в момент окончания действия силы
`mv = 1/2 F_max * tau`.
Отсюда находим начальную скорость полёта мяча
`v = (F_max * tau)/(2m) = (3,5 * 10^3 * 8 * 10^-3)/(2 * 0,5) = 28 sf»м/с»`
и максимальную дальность (старт под углом `alpha = pi/4`) полёта
`L_max = (v^2)/g = (28^2)/(10)
В рассматриваемом модельном примере получен несколько завышенный по сравнению с наблюдениями результат.
На вступительных испытаниях и олимпиадах в вузах России регулярно предлагаются задачи динамики, в которых наряду с «традиционными» силами: силой тяжести, силой Архимеда и т. д., на тело действует сила лобового сопротивления. Такая сила возникает, например, при движении тел в жидкостях и газах. Вопрос о движении тел в жидкостях и газах имеет большое практическое значение. Знакомство с действием такого рода сил уместно начинать, как это принято в физике, с простейших модельных зависимостей, в которых сила сопротивления принимается пропорциональной скорости или её квадрату.
Мяч, брошенный с горизонтальной поверхности земли под углом `alpha = 60^@` к горизонту со скоростью `v = 10 sf»м/с»`, упал на землю, имея вертикальную составляющую скорости по абсолютной величине на `delta = 30 %` меньшую, чем при бросании. Найдите время полёта мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости.
Согласно второму закону Ньютона приращение импульса пропорционально силе и происходит по направлению силы:
`m * Delta vec v = (m vec g — k vec v) * Delta t`.
Переходя к проекциям сил и приращения скорости на вертикальную ось, получаем
`m * Delta v_y = — mg * Delta t — k * v_y * Delta t`.
Заметим, что элементарное перемещение мяча по вертикали равно `Delta y = v_y * Delta t`, и перепишем последнее соотношение в виде:
`m * Delta v_y = — mg * Delta t — k * Delta y`.
Просуммируем все приращения вертикальной проекции импульса по всему времени полёта, т. е. от `t = 0` до `t = T`:
`m * (sum Delta v_y) = — mg * (sum Delta t) — k* (sum Delta y)`.
Переходя к конечным приращениям, получаем
`m (v_y (T) — v_y (0)) = — mg (T — 0) — k (y (T) — y (0))`.
Точки старта и финиша находятся в одной горизонтальной плоскости, поэтому перемещение мяча по вертикали за время полёта нулевое
Тогда `- (1 — delta) mv_0 sin alpha — mv_0 sin alpha = — mgT`. Отсюда находим продолжительность полёта мяча:
`T = (v_0 sin alpha)/(g) (2 — delta) = (10 * sin 60^@)/(10) (2,0 — 0,3)
В следующем примере рассматривается удар, в ходе которого две очень большие силы, «согласованно» действуют во взаимно перпендикулярных направлениях.
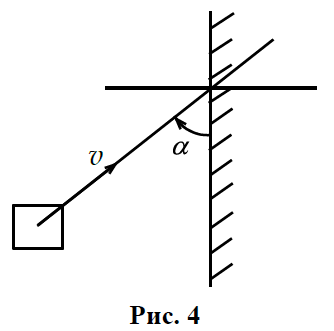
Кубик, движущийся поступательно со скоростью `v` (рис. 4) по гладкой горизонтальной поверхности, испытывает соударение с шероховатой вертикальной стенкой.
Коэффициент трения `mu` скольжения кубика по стенке и угол `alpha` известны. Одна из граней кубика параллельна стенке. Под каким углом `beta` кубик отскочит от стенки? Считайте, что перпендикулярная стенке составляющая скорости кубика в результате соударения не изменяется по величине.
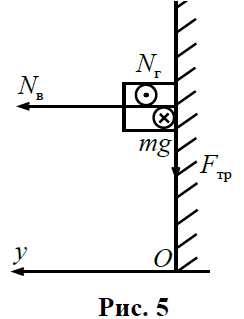
Силы, действующие на кубик в процессе соударения, показаны на рис. 5.
По второму закону Ньютона
`Delta vec p = (m vec g + vecN_(«г») + vecF_(«тр») + vecN_(«в») ) * Delta t`.
Переходя к проекциям на горизонтальные оси `Ox` и `Oy`, получаем
`Delta p_x = — F_sf»тр» Delta t`, `Delta p_y = N_sf»в» Delta t`.
Просуммируем приращения `Delta p_y = N_sf»в» Delta t` по всему времени `tau` соударения, получим:
`sum Delta p_y = p_y (tau) — p_y (0) = mv sin alpha — (- mv sin alpha) = sum_(0 0`, получаем
`bbb»tg» beta = (v_y (tau))/(v_x (tau)) = (sin alpha)/(cos alpha — 2 mu sin alpha)`.
Лекция №3. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
2.1. Основное уравнение динамики поступательного движения
Динамика − раздел механики, в котором изучается движение тел под действием приложенных сил. Основной задачей динамики является определение кинематического уравнения движения материальной точки, если известны, приложенные силы к ней со стороны окружающих тел и начальные условия, положение и скорость тела в начальный момент времени.
В основе динамики лежат три закона И. Ньютона, которые являются результатом обобщения опытных данных и теоретических сведений в области механики. Для формулировки законов динамики необходимо дать определение следующих динамических характеристик: инертность, масса, импульс тела и сила.
Инертностью (или инерцией ) называется свойство тела сохранить неизменным состояние покоя или равномерного прямолинейного движения. Количественной мерой инертности тел является инертная масса ), а количественной мерой гравитационного взаимодействия яв-ляется гравитационной массы . К настоящему времени экспериментально показано, что инертная и гравитационная массы с большой степенью точности совпадают, т. е. они эквивалентны. Этот фундаментальный закон природы называется принципом эквивалентности .
Масса − это физическая величина, являющаяся мерой инерционных и гравитационных свойств тела. Единицей массы в СИ является килограмм: [m] = кг . Масса − величина аддитивная, т. е. масса тела равна сумме масс всех частей этого тела.
Импульс тела (или количество движения ) − это векторная физическая величина, равная произведению массы тела на его скорость
Единица измерения импульса в СИ — $$ <[p]>= <кг×м \over c>$$ .
Сила − это векторная физическая величина, являющаяся мерой механического воздействия на тело со стороны других тел или полей, в результате, которого тело деформируется или приобретает ускорение. Единица измерения силы в СИ − Ньютон $$ <[F]>= кг× <м \over c^2>=H$$ . Сила, приложенная к телу, считается заданной, если указаны ее точка приложения, направление действия и численное значение.
Первый закон Ньютона (или закон инерции ), который формулируется следующим образом: всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, пока действие со стороны других тел не выведут его из этого состояния. Система отсчета, в которой выполняется первый закон Ньютона, называется инерциальной . Рассмотрим две системы отсчета, двигающиеся друг относительно друга с некоторым ускорением. Если относительно одной из них тело покоится, то относительно другой оно будет двигаться с ускорением. Получается, что в одной системе отсчета первый закон Ньютона выполняется, а в другой не выполняется. Любая система отсчета, движущаяся относительно некоторой инерциальной системы прямолинейно и равномерно будет также инерциальной. Системы отсчета, по отношению к которым первый закон Ньютона не выполняется, называются неинерциальными системами отсчета.
Второй закон Ньютона : ускорение тела прямо пропорционально результирующей сил приложенных к нему и обратно пропорционально его массе.
Скорость изменения импульса материальной точки равна действующей на нее силе. Уравнения (2.1.2) и (2.1.3) являются математическим выражением второго закона Ньютона. Второй закон Ньютона позволяет решать основную задачу механики. Поэтому его называется основным уравнением динамики поступательного движения .
Третий закон Ньютона : сила, с которой одно тело действует на другое, равна по величине и противоположна по направлению силе, с которой второе тело действует на первое.
2.2. Преобразования Галилея. Механический принцип относительности
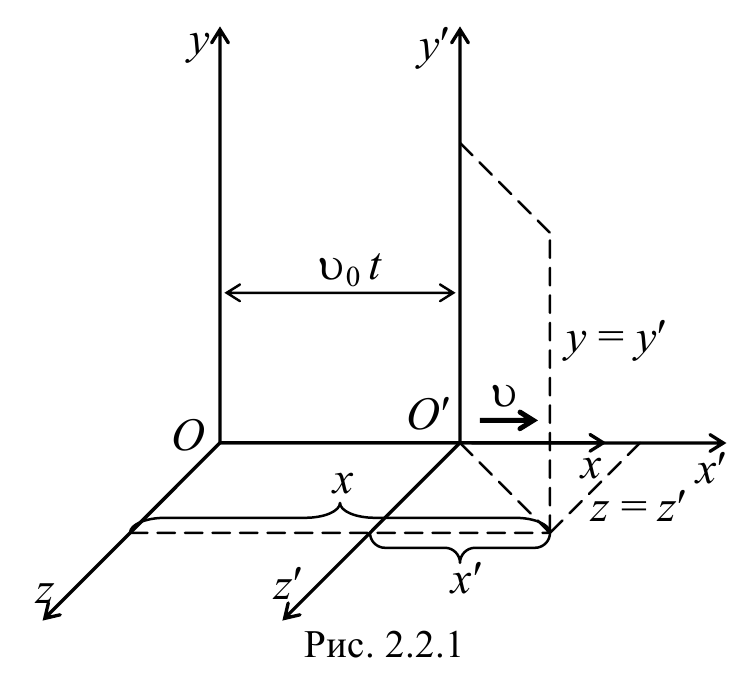
Рассмотрим две инерциальные системы XYZ (система К ) и X’Y’Z’ (система К’ ), первая из которых будет неподвижной, а вторая движется поступательно вдоль положительного направления оси 0X с постоянной скоростью υ0 . Найдем связь между координатами х, у, z некоторой точки M в системе К и координатами х’, у’, z’ . той же точки в системе К’ . Если начать отсчет времени с того момента, когда начала координат обеих систем совпадали, то, как следует из рис. 2.2.1 в момент времени t координаты точки М в этих системах будут связаны соотношениями

Формулы (2.2.1) называются преобразованиями Галилея для координат и времени. Они могут быть представлены также в виде обратного преобразования:

Из преобразований Галилея вытекает классический закон сложения скоростей. Продифференцировав соотношения (2.2.2) по времени, найдем связь между скоростями точки М по отношению к системам отсчета К и К’

Согласно векторному соотношению (2.2.3) скорость υ точки М относительно неподвижной системы координат (абсолютная) равна векторной сумме ее скорости υ’ относительно подвижной системы (относительная) и скорости υ0 подвижной системы относительно неподвижной (переносная).
Продифференцировав выражение (2.2.3) по времени t , получим при условии, что υ0 = const

Отсюда следует, что ускорение какого-либо тела во всех системах отсчета, движущихся друг относительно друга прямолинейно и равномерно, оказывается одним и тем же. Поэтому, если одна из этих систем инерциальна, то и остальные будут инерциальными.
Так как масса в классической механике не зависит от скорости, то произведение массы тела на его ускорение во всех инерциальных системах будет одинаковым, т. е. вид второго закона Ньютона, описывающего движение тела, будет одинаковым во всех инерциальных системах отсчета. Неизменность выражения для закона Ньютона отражает тот факт, что все механические явления во всех инерциальных системах отсчета протекают одинаково при одинаковых условиях. Другими словами − все инерциальные системы отсчета эквивалентны между собой. Это утверждение носит название принципа относительности Галилея (или механический принцип относительности ). Он означает, что никакими опытами внутри инерциальной системы отсчета невозможно установить покоится эта система или движется равномерно и прямолинейно. Принцип относительности справедлив не только для механических, но и для любых физических явлений.
Используя преобразования Галилея, можно показать, что отрезки длин (масштабы) и интервалы времени между двумя какими-либо событиями одинаковы во всех инерциальных системах отсчета.

Понятие времени в классической механике является абсолютным, поэтому

Физические величины, не изменяющиеся при переходе от одной инерциальной системе к другой, называются инвариантными. Следовательно, отрезки длин и интервалы времени являются инвариантами классической механики.
2.3. Система материальных точек. Закон сохранения импульса
Механической системой называется совокупность материальных точек, рассматриваемых как единое целое. Силы взаимодействия между материальными точками механической системы называются внутренними . Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними . Механическая система тел, на которую не действуют внешние силы, называется замкнутой механической системой .
Импульс механической системы, представляет собой сумму импульсов всех материальных точек, входящих в механическую систему.
Рассмотрим систему материальных точек массами m1 , m2, …, mn , движущихся со скоростями υ1 , υ2 , …, υn . Пусть на каждую из этих точек действуют равнодействующие внутренних сил F 1 i , F 2 i , …, F n i , и равнодействующие внешних сил F 1 e , F 2 e , …, F n e .
Используя второй закон Ньютона для системы точек, запишем

Сложим эти уравнения:
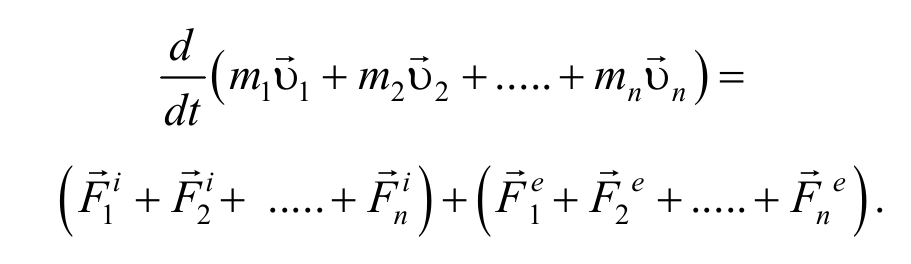
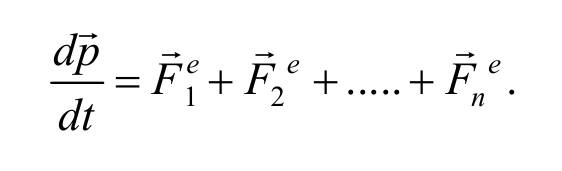
Согласно третьему закону Ньютона, силы, действующие между материальными точками механической системы, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю.

С учетом выражения (2.3.1) получим закон изменения импульса механической системы : производная по времени от импульса механической системы равна векторной сумме внешних сил, действующих на систему.
В случае замкнутой механической системы,

Выражение (2.3.6) выражает закон сохранения импульса: импульс замкнутой системы не изменяется с течением времени.
Закон сохранения импульса носит универсальный характер и выполняется также в релятивистской и квантовой механике. Закон сохранения импульса − это фундаментальный закон природы. Он является следствием определенного свойства симметрии пространства − его однородности. Под однородностью пространства понимают одинаковость свойств пространства во всех его точках.
2.4. Центр масс. Уравнение движения центра масс
В классической механике масса тела не зависит от его скорости движения, и импульс системы может быть выражен через скорость ее центра масс.
Центром масс (или центром инерции ) системы материальных точек называется воображаемая точка С , положение которой характеризует распределение массы этой системы, и радиус-вектор которой определяется выражением:
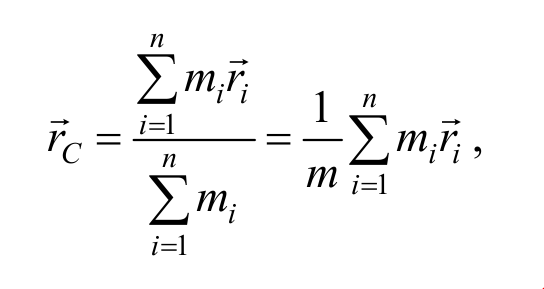
где mi и r i − масса и радиус-вектор i-ой точки системы; $$m = <\sum_
Соотношения координат центра инерции системы равны

В случае непрерывного распределения массы в системе (например, в случае протяженного тела) радиус-вектор центра масс системы определяется выражением
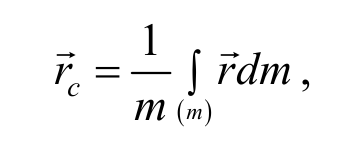
где r − радиус-вектор малого элемента системы, масса которого равна dm , а интегрирование проводится по всем элементам системы, т. е. по всей ее массе m .
Определим скорость центра масс механической системы

Учитывая выражение (2.3.1) получим
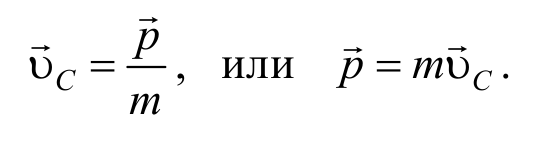
Таким образом, импульс механической системы равен произведению массы системы на скорость ее центра масс.
С учетом выражения (2.3.5) получим
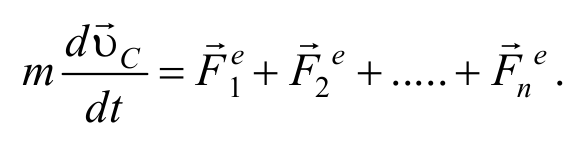
Это выражение представляет собой закон движения центра масс : центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы, и на которую действует сила, равная векторной сумме всех внешних сил, приложенных к системе.
Закон движения центра масс показывает, что для изменения скорости центра масс системы необходимо, чтобы на систему действовала внешняя сила. Внутренние силы взаимодействия частей системы могут вызвать изменения скоростей этих частей, но они не могут повлиять на суммарный импульс системы и скорость ее центра масс.
http://zftsh.online/articles/4921
http://physics.belstu.by/mechanics_lk/mechanics_lk3.html