Понятие об уравнении линии и поверхности. Полярная система координат.
Читайте также:
|




 должен быть одинаков со знаком y, а знак
должен быть одинаков со знаком y, а знак  — со знаком х.
— со знаком х.


 обозначает, что точка М принадлежит Р. Формула
обозначает, что точка М принадлежит Р. Формула  обозначает, что точка N не принадлежит Р.
обозначает, что точка N не принадлежит Р.

 (образующая) вдоль заданной линии L, лежащей в плоскости Оху (направляющая) (рис. 190).
(образующая) вдоль заданной линии L, лежащей в плоскости Оху (направляющая) (рис. 190).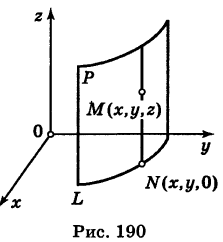



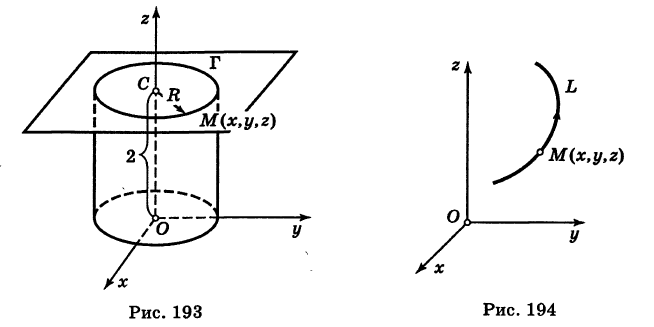
 (рис. 192). Точка
(рис. 192). Точка  , лежащая на линии L, принадлежит как поверхности
, лежащая на линии L, принадлежит как поверхности  так и поверхности
так и поверхности  , и, следовательно, координаты этой точки удовлетворяют уравнениям обеих поверхностей.
, и, следовательно, координаты этой точки удовлетворяют уравнениям обеих поверхностей.
 называется такая пара уравнений между переменными
называется такая пара уравнений между переменными  , которой удовлетворяют координаты каждой точки, лежащей на данной линии, и не удовлетворяют координаты любой точки, не лежащей на этой линии.
, которой удовлетворяют координаты каждой точки, лежащей на данной линии, и не удовлетворяют координаты любой точки, не лежащей на этой линии.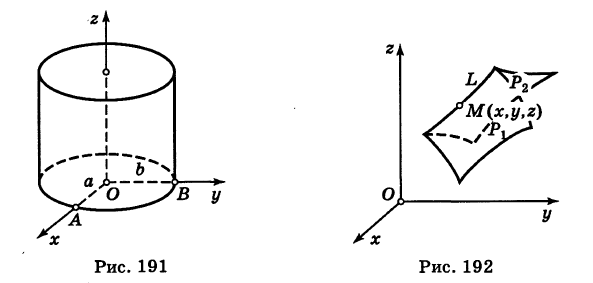


 — некоторые определенные функции. Обобщая уравнения (5), под t понимают вспомогательную переменную (параметр)> не обязательно время; поэтому уравнения (5) носят название параметрических уравнений линии в пространстве.
— некоторые определенные функции. Обобщая уравнения (5), под t понимают вспомогательную переменную (параметр)> не обязательно время; поэтому уравнения (5) носят название параметрических уравнений линии в пространстве. (рис. 195).
(рис. 195).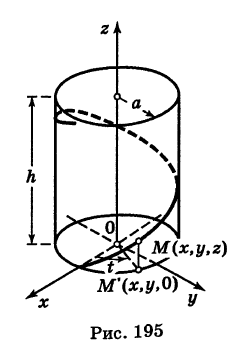
 и учитывая, что аппликата г винтовой линии растет пропорционально углу поворота t, будем иметь
и учитывая, что аппликата г винтовой линии растет пропорционально углу поворота t, будем иметь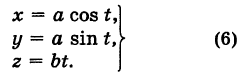
 ; тогда
; тогда  . Следовательно,
. Следовательно,

 . Из уравнений (6′) также вытекает, что проекция винтовой линии (6′) на координатную плоскость Оху есть окружность, а на координатную плоскость
. Из уравнений (6′) также вытекает, что проекция винтовой линии (6′) на координатную плоскость Оху есть окружность, а на координатную плоскость  — косинусоида.
— косинусоида.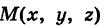 кривой L можно характеризовать ее радиусом-вектором («следящий радиус-вектор») (рис. 196)
кривой L можно характеризовать ее радиусом-вектором («следящий радиус-вектор») (рис. 196)
 — орты). Тогда из (5) получаем векторное уравнение линии
— орты). Тогда из (5) получаем векторное уравнение линии


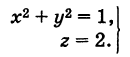
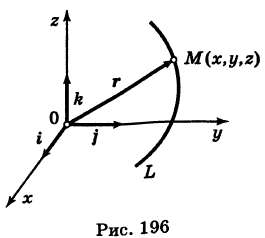
 или
или  . Следовательно, графиком уравнения (8) является пара плоскостей, параллельных координатной плоскости Оху и отстоящих от нее на расстояниях, равных единице (рис. 197).
. Следовательно, графиком уравнения (8) является пара плоскостей, параллельных координатной плоскости Оху и отстоящих от нее на расстояниях, равных единице (рис. 197).

| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Общее уравнение плоскости
- Угол между плоскостями
- Понятие о производной вектор-функции
- Криволинейные интегралы
- Прямоугольная система координат на плоскости и ее применение
- Линии второго порядка
- Полярные координаты
- Непрерывность функции
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Понятие поверхности общее уравнение поверхности
Многое, что окружает нас в жизни, если смотреть с позиции геометрии, — это линии и поверхности простых и сложных форм. Поверхности широко используются в различных областях науки и техники при создании очертаний различных технических форм или как объекты инженерных исследований.
Основные понятия и определения
Поверхность как объект инженерного исследования может быть задана следующими основными способами: а) уравнением; б) каркасом; в) определи гелем; г) очерком.
Составлением уравнений поверхностей занимается аналитическая геометрия; она рассматривает поверхность как множество точек, координаты которых удовлетворяют уравнению вида F (х,у, z) = 0.
В начертательной геометрии поверхность на чертеже задается каркасом, определителем, очерком.
При каркасном способе поверхность задастся совокупностью некоторого количества линий, принадлежащих поверхности. В качестве линий, образующих каркас, как правило, берут семейство линий, получающихся при пересечении поверхности рядом параллельных плоскостей. Этот способ используется при проектировании кузовов автомобилей, в самолето — и судостроении, в топофафии и т. п.
Поверхность, образованная движущейся в пространстве линией, на чертеже может быть задана определителем поверхности.
Определителем поверхности называется совокупность геометрических фигур и связей между ними. позволяющих однозначно образовать поверхность в пространстве и задать ее на чертеже.
Способ образования поверхности движущейся в просфанстве линией называют кинематическим.
Линию, образующую при своем движении в пространстве данную поверхность называют образующей (производящей).
Образующая при своем движении может изменять свою форму или оставаться неизменной. Закон перемещения образующей можно, в частности, задать неподвижными линиями, на которые при своем движении опирается образующая. Эти линии называются направляющими.
На чертеже при задании поверхности ее определителем строятся проекции направляющих линий, указывается, как находятся проекции образующей линии. Построив ряд положений образующей линии, получим каркас поверхности. Пример образования поверхности кинематическим способом показан на рис. 96.

В качестве образующей а этой поверхности взята плоская кривая. Закон перемещения образующей задан двумя направляющими m и n и плоскостью а. Образующая а скользит по направляющим, все время оставаясь параллельной плоскости a.
Различают геометрическую и алгоритмическую часть определителя поверхности. Определитель имеет следующую форму записи Ф( Г ) [ А ], где Ф — обозначение поверхности; ( Г ) -геометрическая часть определителя, в ней перечисляются все геометрические фигуры, участвующие в образовании поверхности и задании ее на чертеже; [А ] — алгоритмическая часть определителя — в ней записывается алгоритм формирования поверхности.
Определитель поверхности выявляется путем анализа способов образования поверхности или се основных свойств. В общем случае одна и та же поверхность может быть образована несколькими способами, поэтому может иметь несколько определителей. Обычно из всех способов образования поверхности выбирают простейший. Например, боковая поверхность прямого кругового цилиндра может быть образована четырьмя способами (рис. 97):

а) как след, оставляемый в пространстве прямой а при ее вращении вокруг оси m (рис. 97,а).
Определитель поверхности — Ф ( а,m ) [ A1]:
б) как след, оставляемый в пространстве кривой линией b при ее вращении вокруг оси m (рис. 97,6).
Определитель поверхности — Ф ( b,m ) [ A2];
в) как след, оставляемый в пространстве окружностью с при поступательном перемещении ее центра О вдоль оси m. при этом плоскость окружности все время остается перпендикулярной к этой оси (рис. 97,в).
Определитель поверхности — Ф ( а,m ) [ A3]:
г) как огибающую всех положений сферической поверхности р постоянного радиуса, центр которой перемещается по оси m (рис.97,г).
Определитель поверхности —Ф ( p,m ) [ A4].
Наиболее простым из рассматриваемых будет определитель Ф ( а,m ) [ A1].
Задание поверхности на чертеже каркасом или определителем не всегда обеспечивает наглядность ее изображения. В некоторых случаях поверхность целесообразнее задавать ее очерком.
Очерком поверхности называется проекция проецирующей цилиндрической поверхности, огибающей заданную поверхность.
По известному уравнению поверхности или се определителю, или очерку всегда можно построить каркас поверхности.
Многообразие поверхностей требует их систематизации. Для поверхностей, образованных кинематическим способом в основу систематизации положен их определитель.
В зависимости от вида образующей поверхности разделяются на два класса:
класс 1 — поверхности нелинейчатые (образующая — кривая линия);
класс 2 — поверхности линейчатые (образующая — прямая линия).
Поверхности нелинейчатые
Поверхности нелинейчатые подразделяют на поверхности с образующей переменного вида (изменяющей свою форму в процессе движения) и на поверхности с образующей постоянного вида.
Нелинейчатые поверхности с образующей переменного вида
К нелинейчатым поверхностям с образующей переменного вида относятся:
1. Поверхность общего вида. Такая поверхность образуется перемещением образующей переменного вида а по криволинейной направляющей т (рис. 98).

2. Каналовая поверхность. Эта поверхность образуется движением плоской замкнутой линии, плоскость которой определенным образом ориентирована в пространстве (рис. 99).

Площадь, ограниченная образующей, монотонно изменяется в процессе ее движения но направляющей. Например, каналовую поверхность имеет переходный участок, соединяющий два трубопровода разной формы.
3. Циклическая поверхность — частный случай каналовой поверхности, когда образующая — окружность, радиус которой монотонно изменяется (рис. 100).

Примером циклической поверхности может быть корпус духового музыкального инструмента.
Нелинейчатые поверхности с образующей постоянного вида
К нелинейчатым поверхностям с образующей постоянного вида относятся:
1. Поверхность общего вида. Такая поверхность может быть образована движением произвольной кривой линии а по направляющей m (рис. 101).

2. Трубчатая поверхность. Образующей трубчатой поверхности является окружность постоянного радиуса. Плоскость окружности при ее движении остается перпендикулярной к направляющей (рис. 102).

Примером трубчатой поверхности может быть поверхность проволоки круглого сечения.
Поверхности линейчатые
Линейчатые поверхности образуются движением прямой (образующей) по заданному закону. В зависимости от закона движения образующей получаем различные линейчатые поверхности.
Линейчатые поверхности с тремя направляющими
К линейчатым поверхностям с тремя направляющими относятся:
1. Поверхность косого цилиндра. Такая поверхность может быть образована движением прямолинейной образующей по трем криволинейным направляющим (рис. 103).

2. Поверхность дважды косого цилиндроида. Эта поверхность образуется в том случае, когда две направляющие кривые, а третья -прямая линия (рис. 104).

3. Поверхность дважды косого коноида получается в том случае, когда одна из направляющих — кривая, а две других — прямые линии (рис. 105).

4. Поверхность однополостного гиперболоида образуется в случае, когда направляющие — три скрещивающиеся прямые, параллельные одной плоскости. Пример. Найти недостающие проекции точек А» и В’ принадлежащих поверхности однополостного гиперболоида (рис. 106).

P e ш е н и е. Для определения недостающей проекции точки, воспользуемся признаком принадлежности ее поверхности: точка принадлежит поверхности; если она принадлежит какой-либо линии этой поверхности.
Для данной линейчатой поверхности при построении проекций образующей сначала задается ее горизонтальная проекция, а затем находится фронтальная. Поэтому через известную горизонтальную проекцию точки A’ проводим проекцию образующей а’2, определяем ее фронтальную проекцию а2«, на которой по линии связи найдем искомую фронтальную проекцию точки A».
Для определения недостающей горизонтальной проекции точки В’ выполним следующие построения:
1. Построим ряд образующих заданной поверхности a1,a2,a3,a4 .
2. На фронтальной плоскости проекций через известную проекцию точки В» проведем проекцию вспомогательной линии b’ принадлежащей заданной поверхности и пересекающей образующие.
3. По известным фронтальным проекциям точек пересечения проекции линии b» с образующими а1«, а2«, а3«, а4« найдем горизонтальные проекции этих точек. Соединив их плавной линией, построим горизонтальную проекцию вспомогательной линии b’ на которой по линии связи найдем искомую проекцию точки В’.
К линейчатым поверхностям с тремя направляющими относятся, например, поверхности гребных винтов судов и пропеллеров самолетов. В архитектуре и строительстве они используются при возведении крытых зданий стадионов, рынков, вокзалов.
Линейчатые поверхности с двумя направляющими и плоскостью параллелизма (поверхности Каталана)
К линейчатым поверхностями с двумя направляющими плоскостью параллелизма относятся:
1. Поверхность прямого цилиндроида. Такая поверхность может быть образована движением прямолинейной образующей по двум направляющим m и n в том случае, когда они — гладкие кривые линии, причем одна из них — плоская кривая, плоскость которой β перпендикулярна плоскости параллелизма a (n ⊂ β, β ⊥ a) (рис. 107).

2. Поверхность прямого коноида. Эта поверхность получается в том случае, когда одна направляющая — кривая линия, а вторая -прямая, причем она перпендикулярна плоскости параллелизма
a( n ⊥ a) (рис. 108). Поверхность прямого коноида используется в гидротехническом строительстве для формирования поверхности устоев мостовых опор.

3. . Такая поверхность образуется в том случае, когда две направляющие — скрещивающие прямые (рис. 109). Поверхность косой плоскости применяется в инженерно — строительной практике для формирования поверхностей откосов, насыпей, железнодорожных и автомобильных дорог, набережных, гидротехнических сооружений в местах сопряжения имеющих различные углы наклона.

Линейчатые поверхности с одной направляющей (торсы)
Торсы являются развертываемыми поверхностями — они могут быть совмещены с плоскостью без складок и разрывов. К торсовым поверхностям относятся:
1. Поверхность с ребром возврата. Эта поверхность образуется движением прямолинейной образующей, во всех своих положениях касательной к пространственной кривой, называемой ребром возврата.
2. Цилиндрическая поверхность. Данная поверхность образуется движением прямолинейной образующей, скользящей по кривой направляющей и остающейся параллельной своему исходному состоянию (рис.110).

3. Коническая поверхность. Эта поверхность образуется движением прямолинейной образующей, скользящей по кривой направляющей и проходящей во всех своих положениях через одну и ту же неподвижную точку S (рис. 111).
http://www.evkova.org/uravneniya-poverhnosti-i-linii-v-prostranstve
http://forkettle.ru/vidioteka/tekhnicheskie-nauki/cherchenie/780-osnovy-nachertatelnoj-geometrii/8638-poverkhnosti