Графический метод решения задач нелинейного программирования
Чтобы найти ее оптимальное решение, нужно выполнить следующие действия:
- Найти ОДР, определяемую ограничениями задачи. Если окажется, что эта область пуста, то это означает, что задача не имеет решения.
- Построить семейство линий уровня целевой функции f(х1, х2) = C при различных значениях числового параметра С.
- При решении задачи на минимум определить направление убывания, а для задачи на максимум — направление возрастания линий уровня ЦФ.
- Найти точку ОДР, через которую проходит линия уровня с наименьшим в задаче на минимум (соответственно, наибольшим в задачи на максимум) значением параметра С. Эта точка будет оптимальным решением. Если ЦФ не ограничена снизу в задаче на минимум (сверху — в задаче на максимум), то это означает, что задача не имеет оптимального решения.
- Найти координаты точки оптимума и определить в ней значение ЦФ.
Отметим, что в отличие от задачи ЛП точка оптимума в задаче НП не обязательно находится на границе ОДР. Ею также может быть внутренняя точка этого множества.
Пример . В задаче выпуклого программирования требуется:
- найти решение графическим методом;
- написать функцию Лагранжа и найти ее седловую точку, используя решение, полученное графически.
F(X) = x1 2 +(x2-2) 2
2x1+x2 ≥ 7
x1+2x2 ≥ 5
Решение. 1) Строим два ограничения, тем самым определяя ОДР. Можно использовать этот калькулятор. Также удобно строить ограничения через этот сервис.
Затем строим функцию цели. В данном случае это окружность.
Поскольку задача минимума, то ищем первое касание линии уровня области ОДР. В данном случае это точка пересечения с прямой 2x1+x2-7=0.
Найдем точку пересечения. Для этого построим уравнение касательной, проходящей через центр окружности O(0;2) и перпендикулярно прямой 2x1+x2-7=0 (можно использовать этот калькулятор). Получаем: 2x2-x1-4=0. Решая систему уравнений:
2x1+x2-7=0
2x2-x1-4=0,
получаем: x1=2, x2=3.
2) Найдем экстремум функции F(X) = x1 2 +(x2-2) 2 , используя калькулятор Функция Лагранжа :
L( X , λ )=F( X )+∑(λi·φi)
где F( X ) — целевая функция вектора X; φi(X) — ограничения в неявном виде (i=1..n)
В качестве целевой функции, подлежащей оптимизации, в этой задаче выступает функция: F(X) = x1 2 +(x2-2) 2
Перепишем ограничение задачи в неявном виде:
φ1(X) = 7 — (2*x1+x2) = 0 (X1)
φ2(X) = 5 — (x1+2*x2) = 0 (X2)
Составим вспомогательную функцию Лагранжа: L(X, λ) = x1 2 +(x2-2) 2 — λ1*(7 — (2*x1+x2)) — λ2*(5 — (x1+2*x2))
Необходимым условием экстремума функции Лагранжа является равенство нулю ее частных производных по переменным хi и неопределенным множителям λ.
Составим систему:
∂L/∂x1 = 2*λ1+λ2+2*x1 = 0
∂L/∂x2 = λ1+2*λ2+2*x2-4 = 0
∂L/∂λ1 = 2*x1+x2-7 = 0
∂L/∂λ2 = x1+2*x2-5 = 0
Решив данную систему, получаем:
а) для случая X1: x1 = λ1/2 + λ2 + 2; x2 = 7 — 2x1
Откуда можно найти такие λ1 ≥ 0, λ2 ≥ 0. Пусть λ2 = 0. Тогда λ1 = 2; x1 = 2; x2 = 3.
Поскольку λ2 ≥ 0, то данное решение удовлетворяет условиям Куна-Таккера. Zmin(2;3)=5
б) для случая X2: x2 = λ1/2 + λ2 + 2; x1 = 5 — 2x2
Откуда можно найти такие λ1 ≥ 0, λ2 ≥ 0. Пусть λ2 = 0. Тогда λ1 = 2/5; x1 = 11/5; x2 = 3/5.
Поскольку λ1 ≥ 0, то данное решение удовлетворяет условиям Куна-Таккера. Zmin(11/5;3/5)=6.8
Минимальное значение составит Zmin(2;3)=5.
Графический способ решения уравнений в среде Microsoft Excel 2007
Тип урока: Обобщение, закрепление пройденного материала и объяснение нового.
Цели и задачи урока:
- повторение изученных графиков функций;
- повторение и закрепление графического способа решения уравнений;
- закрепление навыков записи и копирования формул, построения графиков функций в электронных таблицах Excel 2007;
- формирование и первичное закрепление знаний о решении уравнений с использованием возможностей электронных таблиц Excel 2007;
- формирование мышления, направленного на выбор оптимального решения;
- формирование информационной культуры школьников.
Оборудование: персональные компьютеры, мультимедиапроектор, проекционный экран.
Материалы к уроку: презентация Power Point на компьютере учителя (Приложение 1).
Слайд 1 из Приложения1 ( далее ссылки на слайды идут без указания Приложения1).
Объявление темы урока.
1. Устная работа (актуализация знаний).
Слайд 2 — Соотнесите перечисленные ниже функции с графиками на чертеже (Рис. 1):
у = 6 — х; у = 2х + 3; у = (х + 3) 2 ; у = -(х — 4) 2 ;  .
.

Слайд 3 Графический способ решения уравнений вида f(x)=0.
Корнями уравнения f(x)=0 являются значения х1, х2, … точек пересечения графика функции y=f(x) с осью абсцисс (Рис. 2).

Найдите корни уравнения х 2 -2х-3=0, используя графический способ решения уравнений (Рис.3).

Слайд 5 Графический способ решения уравнений вида f (x)=g (x).
Корнями уравнения f(x)=g(x) являются значения х1, х2, … точек пересечения графиков функций y=f(x) и у=g(x). (Рис. 4):

Слайд 6 Найдите корни уравнения  , используя графический способ решения уравнений (Рис. 5).
, используя графический способ решения уравнений (Рис. 5).

2. Объяснение нового материала. Практическая работа.
Решение уравнений графическим способом требует больших временных затрат на построение графиков функций и в большинстве случаев дает грубо приближенные решения. При использовании электронных таблиц, в данном случае – Microsoft Excel 2007, существенно экономится время на построение графиков функций, и появляются дополнительные возможности нахождения корней уравнения с заданной точностью (метод Подбор параметра).
I. Графический способ решения уравнений вида f(x)=0 в Excel.
Дальнейшая работа выполняется учителем в Excel одновременно с учениками с подробными (при необходимости) инструкциями и выводом результатов на проекционный экран. Слайды Приложения 1 используются для формулировки задач и подведения промежуточных итогов.
Пример1: Используя средства построения диаграмм в Excel, решить графическим способом уравнение —х 2 +5х-4=0.
Для этого: построить график функции у=-х 2 +5х-4 на промежутке [ 0; 5 ] с шагом 0,25; \найти значения х точек пересечения графика функции с осью абсцисс.
Выполнение задания можно разбить на этапы:
1 этап: Представление функции в табличной форме (рис. 6):

- в ячейку А1 ввести текст Х, в ячейку A2 — Y;
- в ячейку В1 ввести число 0, в ячейку С1 – число 0,25;
- выделить ячейки В1:С1, подвести указатель мыши к маркеру выделения, и в тот момент, когда указатель мыши примет форму черного крестика, протянуть маркер выделения вправо до ячейки V1 (Рис. 7).

При вводе формулы можно вводить адрес ячейки с клавиатуры (не забыть переключиться на латиницу), а можно просто щелкнуть мышью на ячейке с нужным адресом.
После ввода формулы в ячейке окажется результат вычисления по формуле, а в поле ввода строки формул — сама формула (Рис. 8):

- скопировать содержимое ячейки B2 в ячейки C2:V2 за маркер выделения. Весь ряд выделенных ячеек заполнится содержимым первой ячейки. При этом ссылки на ячейки в формулах изменятся относительно смещения самой формулы.
2 этап: Построение диаграммы типа График.
- выделить диапазон ячеек B2:V2;
- на вкладке Вставка|Диаграммы|График выбрать вид График;
- на вкладке Конструктор|Выбрать данные (Рис. 9) в открывшемся окне «Выбор источника данных» щелкнуть по кнопке Изменить в поле Подписи горизонтальной оси — откроется окно «Подписи оси». Выделить в таблице диапазон ячеек B1:V1 (значения переменной х). В обоих окнах щелкнуть по кнопкам ОК;

- на вкладке Макет|Оси|Основная горизонтальная ось|Дополнительные параметры основной горизонтальной оси выбрать:
Интервал между делениями: 4;
Интервал между подписями: Единица измерения интервала: 4;
Положение оси: по делениям;
Выбрать ширину и цвет линии (Вкладки Тип линии и Цвет линии);
- самостоятельно изменить ширину и цвет линии для вертикальной оси;
- на вкладке Макет|Сетка|Вертикальные линии сетки по основной оси выбрать Основные линии сетки.
Примерный результат работы приведен на рис. 10:

3 этап: Определение корней уравнения.
График функции у=-х 2 +5х-4 пересекает ось абсцисс в двух точках и, следовательно, уравнение -х 2 +5х-4=0 имеет два корня: х1=1; х2=4.
II. Графический способ решения уравнений вида f(x)=g(x) в Excel.
Пример 2: Решить графическим способом уравнение  .
.
Для этого: в одной системе координат построить графики функций у1=  и у2=1-х на промежутке [ -1; 4 ] с шагом 0,25; найти значение х точки пересечения графиков функций.
и у2=1-х на промежутке [ -1; 4 ] с шагом 0,25; найти значение х точки пересечения графиков функций.
1 этап: Представление функций в табличной форме (рис. 1):
воспользоваться встроенной функцией Корень (Рис. 11).
2 этап: Построение диаграммы типа График.
Примерный результат работы приведен на Рис. 12:

3 этап: Определение корней уравнения.
Графики функций у1= и у2=1-х пересекаются в одной точке (0;1) и, следовательно, уравнение  имеет один корень – абсцисса этой точки: х=0.
имеет один корень – абсцисса этой точки: х=0.
III. Метод Подбор параметра.
Графический способ решения уравнений красив, но далеко не всегда точки пересечения могут быть такими «хорошими», как в специально подобранных примерах 1 и 2.
Возможности электронных таблиц позволяют находить приближенные значения коней уравнения с заданной точностью. Для этого используется метод Подбор параметра.
Пример 3: Разберем метод Подбор параметра на примере решения уравнения —х 2 +5х-3=0.
1 этап: Построение диаграммы типа График для приближенного определения корней уравнения.
Построить график функции у=—х 2 +5х-3, отредактировав полученные в Примере 1 формулы.
- выполнить двойной щелчок по ячейке B2, внести необходимые изменения;
- с помощью маркера выделения скопировать формулу во все ячейки диапазона C2:V2.
Все изменения сразу отобразятся на графике.
Примерный результат работы приведен на Рис. 13:

2 этап: Определение приближенных значений корней уравнения.
График функции у=-х 2 +5х-3 пересекает ось абсцисс в двух точках и, следовательно, уравнение -х 2 +5х-4=0 имеет два корня.
По графику приближенно можно определить, что х1≈0,7; х2≈4,3.
3 этап: Поиск приближенного решения уравнения с заданной точностью методом Подбор параметра.
1) Начать с поиска более точного значения меньшего корня.
По графику видно, что ближайший аргумент к точке пересечения графика с осью абсцисс равен 0,75. В таблице значений функции этот аргумент размещается в ячейке E1.
- Выделить ячейку Е2;
- перейти на вкладку Данные|Анализ «что-если»|Подбор параметра…;
В открывшемся диалоговом окне Подбор параметра (Рис. 14) в поле Значение ввести требуемое значение функции: 0.
В поле Изменяя значение ячейки: ввести $E$1 (щелкнув по ячейке E1).
Щелкнуть по кнопке ОК.


- В окне Результат подбора (Рис. 15) выводится информация о величине подбираемого и подобранного значения функции:
- В ячейке E1 выводится подобранное значение аргумента 0,6972 с требуемой точностью (0,0001).
Установить точность можно путем установки в ячейках таблицы точности представления чисел – числа знаков после запятой (Формат ячеек|Число|Числовой).
Итак, первый корень уравнения определен с заданной точностью: х1≈0,6972.
2) Самостоятельно найти значение большего корня с той же точностью. (х2≈4,3029).
IV. Метод Подбор параметра для решения уравнений вида f(x)=g(x).
При использовании метода Подбор параметров для решения уравнений вида f(x)=g(x) вводят вспомогательную функцию y(x)=f(x)-g(x) и находят с требуемой точностью значения х точек пересечения графика функции y(x) с осью абсцисс.
3. Закрепление изученного материала. Самостоятельная работа.
Задание: Используя метода Подбор параметров, найти корни уравнения  с точностью до 0,001.
с точностью до 0,001.
- ввести функцию у=
 и построить ее график на промежутке [ -1; 4 ] с шагом 0,25 (Рис. 16):
и построить ее график на промежутке [ -1; 4 ] с шагом 0,25 (Рис. 16):
 и построить ее график на промежутке [ -1; 4 ] с шагом 0,25 (Рис. 16):
и построить ее график на промежутке [ -1; 4 ] с шагом 0,25 (Рис. 16):
- найти приближенное значение х точки пересечения графика функции с осью абсцисс (х≈1,4);
- найти приближенное решение уравнения с точностью до 0,001 методом Подбор параметра (х≈1,438).
4. Итог урока.
Слайд 12 Проверка результатов самостоятельной работы.
Слайд 13 Повторение графического способа решения уравнения вида f(x)=0.
Слайд 14 Повторение графического способа решения уравнения вида f(x)=g(x).
5. Домашнее задание.
Используя средства построения диаграмм в Excel и метод Подбор параметра, определите корни уравнения х 2 -5х+2=0 с точностью до 0,01.
Нелинейные электрические цепи
Содержание:
Расчет нелинейных электрических цепей:
Законы Кирхгофа в первой форме записи (
Приведение нелинейных цепей к линейным
Такое приведение можно сделать, если нелинейные элементы цепи работают в узком диапазоне напряжений и токов, где соответствующие участки вольтамперных характеристик близки к прямым.
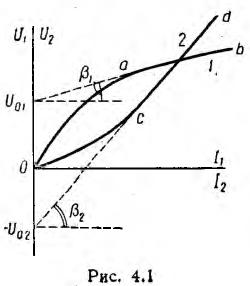
Пусть это, например, имеет место для участков ab и cd характеристик 1 и 2 (рис. 4.1) нелинейных резисторов R1 и R2 цепи рис. 4.2, а. Так как продолжения этих прямых составляют с осью токов углы  и пересекают ось напряжений в точках
и пересекают ось напряжений в точках  , уравнения прямых получают следующий вид:
, уравнения прямых получают следующий вид:

где R11 и R12 — дифференциальные сопротивления этих резисторов, имеющие постоянные значения на участках ab и cd; k — масштабный коэффициент.
Следовательно, каждый такой нелинейный элемент может быть представлен в виде эквивалентной схемы, состоящей из последовательного соединения — резисторов R11 или R12 и источника напряжения U01 или — U02 включенного навстречу внешнему напряжению, так как последнее должно преодолеть напряжение этого источника.
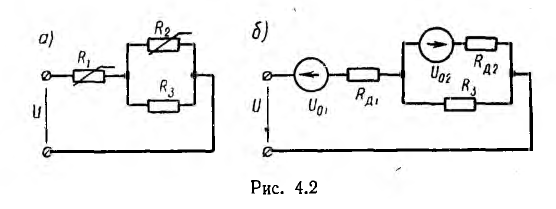
В результате нелинейная цепь рис. 4.2, а заменяется линейной цепью рис. 4.2, б. Так как при принятом положительном направлении напряжение U02 второго источника отрицательно, его направление совпадает с напряжением U всей цепи. Полученная цепь рис. 4.2, б рассчитывается обычными методами. Решение будет правильным только в том случае, если токи I1 и I2 не выйдут за пределы участков ab и cd (см. рис. 4.1).
Графические методы расчета нелинейных цепей
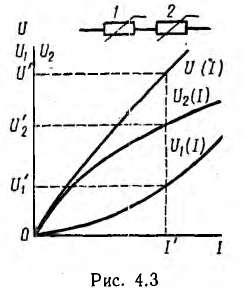
Вольтамперная характеристика одиночного нелинейного резистора (см. рис. 1.9—1.11) сразу позволяет определить ток по заданному напряжению или напряжение по заданному току. При последовательном соединении любого числа нелинейных и линейных резисторов вольтамперная характеристика всей цепи строится путем суммирования ординат характеристик отдельных резисторов в соответствии с зависимостью

На рис. 4.3 показано такое построение для двух последовательно соединенных резисторов. По характеристике всей цепи для заданного значения напряжения U’ определяется соответствующий ему ток I’, а по Рис. 4.3 нему — напряжения  участков цепи.
участков цепи.
Если нужно определить ток и напряжения на участках цепи из двух приемников только при одном значении напряжения U всей цепи, нет надобности строить вольтамперную характеристику всей цепи, следует лишь отложить горизонталь для заданного значения U, а oт нее вниз — характеристику U2 (I) (рис. 4.4, а). Её пересечение с характеристикой U1(I) даст рабочую точку и определит тем самым ток I’ цепи и напряжения U’1 и U’2 на участках.
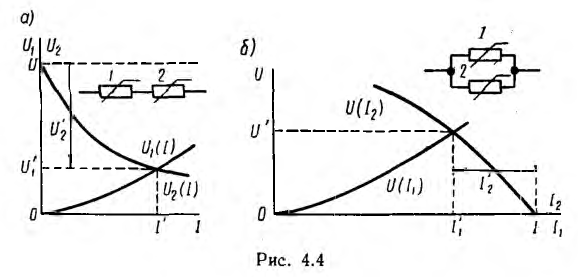
Рис. 4.4, а иллюстрирует также графическое решение задачи определения тока и напряжения цепи при питании нелинейного резистора с вольтамперной характеристикой Ul (I) от источника напряжения с нелинейной внешней характеристикой U2 (I).
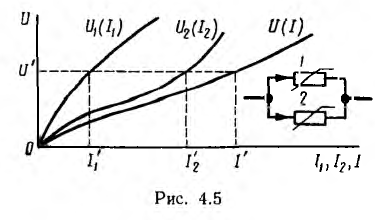
При параллельном соединении нескольких линейных и нелинейных резисторов вольтамперная характеристика всей цепи строится путем суммирования абсцисс характеристик, т. е. токов отдельных резисторов:
На рис. 4.5 показано такое построение для двух параллельно соединенных резисторов. По характеристике для всей цепи для любого заданного тока I определяется напряжение U’, а по нему — токи I1‘ и I2‘ участков цепи.
Для определения токов ветвей только при одном значении тока I всей цепи можно применить упрощенное построение, аналогичное рис. 4.4, а и показанное на рис. 4.4, б для резисторов с теми же вольтамперными характеристиками. Характеристика U (I2) строится влево от вертикали для заданного значения I. Ее пересечение с характеристикой U (I1) определяет напряжение U’ цепи и токи I1‘ и I2‘ на ее участках.
При смешанном соединении, например при расчете цепи рис. 4.6, а, также строится вольтамперная характеристика всей цепи по характеристикам отдельных резисторов (рис. 4.6, б). С помощью суммирования абсцисс, т. е. токов I2 и I3, строится характеристика параллельного разветвления U23 (I1), затем, суммируя ординаты этой характеристики и характеристики Ul (I1), т. е. напряжения U23 и U1 строят характеристику U(I1) всей цепи. По этой характеристике для заданного напряжения U’ определяется ток I’1 цепи,
после чего по характеристикам Ul (I1) и U23 (I1), находят напряжения  участков, а для напряжения U’23 по характеристикам U2 (I2) и U3(I3) — токи
участков, а для напряжения U’23 по характеристикам U2 (I2) и U3(I3) — токи 
Совершенно аналогичны построения, если цепь со смешанным соединением, помимо линейных и нелинейных резисторов, содержит источники электрической энергии, например источники напряжения, вольтамперные характеристики которых без учета внутренних сопротивлений представляют собой прямые, параллельные оси абсцисс.
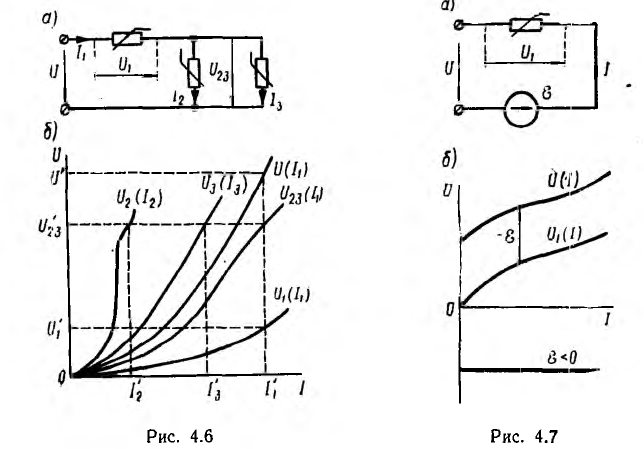
Их ординаты и следует алгебраически просуммировать с ординатами
вольтамперных характеристик участков (в том числе внутренних сопротивлений), соединенных последовательно с этими источниками, чтобы получить полные характеристики ветвей. При этом необходимо соблюдать правило знаков. Так как напряжение всей ветви должно преодолевать э. д. с. включенного в ветвь источника, то при э. д. с., направленной навстречу току (рис. 4.7, а), нужно при суммировании брать ее с положительным знаком (рис. 4.7, б), и наоборот.
После построения аналогичных характеристик для всех ветвей подобно предыдущему постепенно строится характеристика всей цепи и по заданному ее напряжению обратным построением определяются напряжения и токи всех ветвей цепи. Аналогичным образом решаются задачи при заданных источниках тока.
Если любая сложная цепь содержит одну нелинейную ветвь, для расчета может быть применен метод эквивалентного источника энергии: вся цепь, кроме нелинейной ветви, заменяется эквивалентным источником напряжения или тока, после чего задача сводится к только что рассмотренной задаче последовательного или параллельного соединения двух элементов — нелинейной ветви и внутреннего сопротивления (проводимости) эквивалентного источника. Это позволит определить ток или напряжение нелинейной ветви, после чего может быть рассчитана линейная часть цепи.
Метод последовательных приближений
Этот метод, называемый также итерационным, является приближенным аналитическим способом решения нелинейных алгебраических уравнений.
В качестве примера рассматривается расчет простой цепи рис. 4.8, состоящей из резистора с нелинейным сопротивлением R(I) с заданной вольтамперной характеристикой, питаемого от источника напряжения с заданной постоянной э. д. с.  и нелинейной внешней характеристикой, из которой может быть получена вольтамперная характеристика его внутреннего сопротивления RB. Вольтамперные характеристики могут быть заданы не графически, а аналитически.
и нелинейной внешней характеристикой, из которой может быть получена вольтамперная характеристика его внутреннего сопротивления RB. Вольтамперные характеристики могут быть заданы не графически, а аналитически.
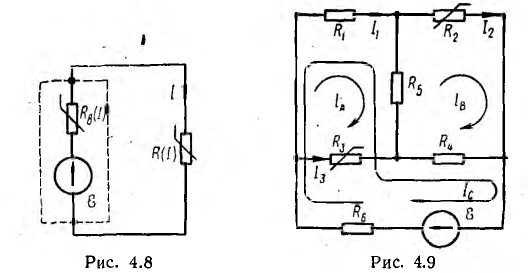
Расчет этой цепи может быть произведен по уравнению
где n — порядковый номер приближения.
Задавшись произвольно нулевым приближением тока I0, по вольтамперным характеристикам находят соответствующие ему напряжения: U0 на внешнем сопротивлении R0 и U0B на внутреннем сопротивлении R0B. Затем определяют эти сопротивления и суммарное сопротивление цепи:

а из исходного уравнения — первое приближение тока
Исходя из этого значения тока, весь ход расчета повторяется для определения второго приближения I2 и так до тех пор, пока из-за сходимости итерационного процесса результат не начнет практически повторяться.
Как известно из математики, итерация в зависимости от вида характеристик может дать расходящийся процесс. Тогда сходимость можно получить на основе исходного уравнения для другой величины, например для напряжения на приемнике:
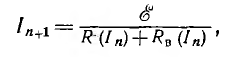
В случае сложной цепи, например моста с двумя нелинейными резисторами (рис. 4.9), исходные уравнения могут быть составлены по методу контурных токов. При этом контуры должны быть выбраны так, чтобы контурный ток нелинейных ветвей одновременно был их действительным током. В противном случае действительный ток нельзя находить путем алгебраического суммирования проходящих по нелинейной ветви двух контурных токов, так как принцип наложения для нелинейных сопротивлений неприменим.
Правильный выбор контурных токов показан на рис. 4.9. Здесь токи нелинейных участков цепи 
Тогда система уравнений получает вид:

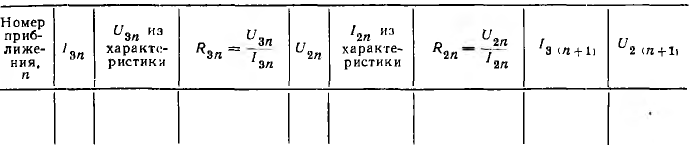
Если нелинейное сопротивление R2(I2) с увеличением тока убывает, a R3(I3) — возрастает, можно показать, что для обеспечения сходимости итерационного процесса из этой системы уравнений надо найти ток I3 = IA и напряжение U2 = R2IB = R2I2 выразив их через все постоянные заданные величины и нелинейные сопротивления R2 и R3. Результаты расчетов целесообразно вносить в табл. 4.1,
из которой видны последовательность и способ получения отдельных величин.
Таблица 4.1
Закончив вычисления после практической сходимости итерационного процесса и определив тем самым напряжения и токи нелинейных
участков цепи, на основе законов Кирхгофа определяют напряжения
и токи всех линейных участков, например ток I1 из уравнения

Нелинейные электрические цепи постоянного тока
В автоматике, электронике и радиотехнике широко применяются элементы электрических цепей, имеющие нелинейную зависимость между током и напряжением U = f(I).
Электрическая цепь, в которую входят нелинейные элементы, называется нелинейной.
Нелинейную вольт-амперную характеристику имеют электровакуумные приборы (см. рис. 2.6), фотоэлементы (см. рис. 2.7), газоразрядные приборы (см. рис. 2.8—2.10), полупроводниковые приборы (см. рис. 2.15).
Большую группу нелинейных элементов представляют нелинейные сопротивления: терморезисторы, варисторы, бареттеры и др.
В данной главе рассмотрены принципы решения некоторых задач расчета электрических цепей с нелинейными элементами на основе их вольт-амперных характеристик.
Эквивалентные схемы простейших нелинейных цепей
Для нелинейных электрических цепей остаются справедливыми законы Ома и Кирхгофа. Однако рассмотренные ранее методы расчета для нелинейных цепей непосредственно применить нельзя.
Аналитический расчет нелинейной цепи можно выполнить при условии, что вольт-амперные характеристики нелинейных элементов выражаются относительно простыми уравнениями I = f(U). Например, для электронной лампы известна зависимость I = kU 3/2 . Кроме того, характеристики некоторых нелинейных элементов в определенном интервале изменения напряжения и тока прямолинейны или близки к прямой. В таких случаях можно составить для нелинейного элемента эквивалентную схему замещения с линейными элементами и ввести ее в аналитический расчет.
В других случаях схемы замещения остаются нелинейными, но с их помощью достигаются упрощения схем нелинейных цепей.
Статическое и динамическое сопротивления нелинейного элемента
У нелинейных элементов различают статическое и динамическое сопротивления (рис. 6.1, а).
Статическим сопротивлением в данной точке a вольт-амперной характеристики называют отношение напряжения к току, соответствующих этой точке: 
где mu и m — масштабы напряжения и тока; mR = mu /mi — масштаб сопротивления.
Динамическое сопротивление в точке a определяется отношением бесконечно малых приращений напряжения dU и тока dI:

Динамическое сопротивление пропорционально тангенсу угла наклона касательной к вольт-амперной характеристике в точке a.
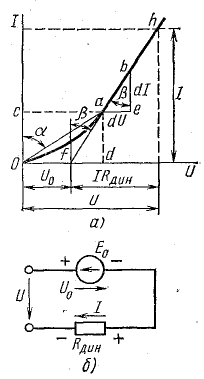
Рис. 6.1. Вольт-амперная характеристика и схема замещения нелинейного элемента
Приведение нелинейных цепей к линейным
Если продолжить линейный участок h-b-a характеристики до пересечения с осью напряжения, то он пересечет ее в точке f.
Отрезок  в принятом масштабе напряжений выражает постоянное напряжение U0. Нетрудно заметить, что в любой точке h прямолинейной части вольт-амперной характеристики напряжение складывается из постоянного напряжения U0 и изменяющейся части, определяемой произведением тока и динамического сопротивления IRдин, т. е. прямая
в принятом масштабе напряжений выражает постоянное напряжение U0. Нетрудно заметить, что в любой точке h прямолинейной части вольт-амперной характеристики напряжение складывается из постоянного напряжения U0 и изменяющейся части, определяемой произведением тока и динамического сопротивления IRдин, т. е. прямая  выражается уравнением
выражается уравнением 
На основании уравнения (6.3) нелинейный элемент можно представить схемой последовательного соединения э. д. с. Е0 = U0 и динамического сопротивления Rдин (рис. 6.1, б). При этом 
Аналогичную схему замещения можно получить для нелинейного элемента с вольт-амперной характеристикой, обращенной выпуклостью к оси токов (рис. 6.2, а). Э. д. с. Е0 в этом случае будет направлена по направлению тока. На примере данной характеристики покажем, что нелинейный элемент можно представить схемой параллельного соединения источника тока и динамической проводимости Gдин.
В линейной части характеристики ток можно представить в виде суммы 
Этому равенству соответствует схема замещения рис. 6.2, б.
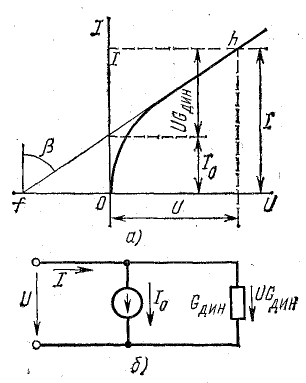
Рис. 6.2. Вольт-амперная характеристика и схема замещения нелинейного элемента
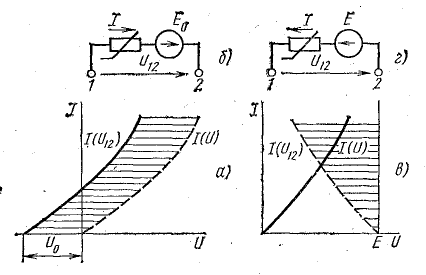
Рис. 6.3. Вольт-амперные характеристики и схемы замещения нелинейного двухполюсника
После замены нелинейных элементов эквивалентными схемами замещения с линейными элементами нелинейную цепь можно рассчитать одним из методов, применяемых для расчета линейных цепей.
Нелинейный активный двухполюсник
Нелинейный элемент, вольт-амперная характеристика которого не проходит через начало координат (рис. 6.3, а), можно представить схемой последовательного соединения постоянной э. д. с. и нелинейного сопротивления.
Если характеристику нелинейного элемента перенести так, чтобы она проходила через начало координат, то получится зависимость I(U) нелинейного сопротивления эквивалентной схемы, в которую кроме этого нелинейного сопротивления последовательно включен источник э. д. с. Е0.
Эквивалентная схема рис. 6.3, б представляет собой активный нелинейный двухполюсник, для которого справедливо уравнение по второму закону Кирхгофа. В данном случае 
Эту схему вводить в аналитический расчет нельзя, так как она остается нелинейной в отличие от схемы рис. 6.1, б или 6.2, б, но ее можно использовать для упрощения более сложной схемы, в которую она входит как часть.
В некоторых случаях полезно или необходимо обратное построение: по известной вольт-амперной характеристике нелинейного сопротивления и величине э. д. с. Е последовательно с ним включенного источника строят вольт-амперную характеристику активного нелинейного двухполюсника (рис. 6.3, в).
Графический расчет нелинейных электрических цепей
Многие нелинейные элементы, применяемые в практике, имеют вольт-амперные характеристики, у которых нет линейных участков, и уравнения для их аналитического выражения.
Расчет цепей, содержащих такие элементы, осуществляется графическими методами, которые применимы при любом виде вольт-амперных характеристик и дают результаты достаточной точности.
Исходные данные для расчета (вольт-амперные характеристики элементов цепи) задаются в виде графиков или таблиц.
Задачу определения тока одного элемента по напряжению этого элемента или обратную задачу решают просто: заданную величину отмечают на оси координат, находят соответствующую ей точку кривой, а затем на другой оси определяют искомую величину.
Рассмотрим, как решаются такие задачи, когда несколько элементов соединены между собой в нелинейной цепи.
Последовательное соединение двух нелинейных элементов
Для расчета такой цепи (рис. 6.4, а) заданные вольт-амперные характеристики элементов и I(U1) и I(U2) строят в общей системе координат (рис. 6.4, б).
Далее строят вольт-амперную характеристику I(U) всей цепи, выражающую зависимость тока в цепи от общего напряжения.
Ток I обоих участков цепи одинаков, а общее напряжение U = U1 + U2.
Для построения общей вольт-амперной характеристики достаточно сложить абсциссы исходных кривых I(U1) и I(U2).
Проведем прямую, параллельную оси абсцисс и соответствующую току I1. Отрезки 1-2 и 1-3 в выбранном масштабе выражают напряжения U1, U2 на участках. Сложив эти отрезки, на той же прямой получим точку 4 общей вольт-амперной характеристики.
Для других значений тока аналогично найден еще ряд точек, через которые проведена общая вольт-амперная характеристика.
Построение вольт-амперных характеристик (рис. 6.4, б) является подготовительным этапом для решения различных задач, относящихся к подобным цепям. Требуется, например, определить ток в цепи и напряжения U1 и U2 на участках, если общее напряжение U известно.
На оси абсцисс находим точку 5, определяющую напряжение U (отрезок 0-5 в масштабе напряжений выражает напряжение в цепи). Через нее проводим перпендикуляр к оси абсцисс до пересечения с общей вольт-амперной характеристикой I(U) в точке 4. Из точки 4 проводим линию, параллельную оси абсцисс. Отрезок 5-4 выражает ток в цепи, а отрезки 1-2 и 1-3 — напряжения на участках (соответственно U1 и U2).
Параллельное соединение двух нелинейных элементов
При параллельном соединении двух нелинейных элементов (рис. 6.5, а) к ним приложено одно и то же напряжение U, а ток в неразветвленной части цепи равен сумме токов в ветвях: I = I1 + I2.
Для построения общей вольт-амперной характеристики I(U) нужно для ряда значений U сложить ординаты вольт-амперных характеристик элементов, как показано на рис. 6.5, б. При напряжении U1 (отрезок 0-1) сумма отрезков 1-2 (ток I1) и 1-3 (ток I2) равна отрезку 1-4 (ток I).
Предположим, что по заданному значению U = U1 нужно определить токи в ветвях и общий ток I. На оси абсцисс откладываем отрезок 0-1, выражающий напряжение U1, и через точку 1 проводим линию, параллельную оси ординат. Определяем точки 2, 3, 4 пересечения прямой с вольт-амперными характеристиками. Отрезки 1-2, 1-3, 1-4 в масштабе токов выражают токи в цепи I1, I2, I.
Аналогично решают задачи при параллельном соединении нелинейного элемента с линейным, а также при большем числе линейных и нелинейных элементов.
Смешанное соединение нелинейных элементов
При смешанном соединении нелинейных элементов графический расчет цепи производится методом «свертывания» схемы: в соответствии со схемой соединения элементов складываются их вольт-амперные характеристики.
Рассмотрим решение этой задачи применительно к схеме рис. 6.6, а. 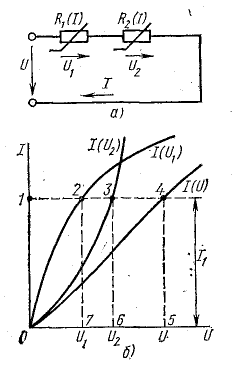
Рис. 6.4. К расчету нелинейной электрической цепи при последовательном соединении элементов
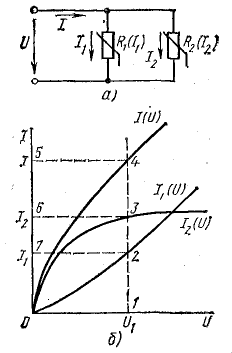
Рис. 6.5. К расчету нелинейной электрической цепи при параллельном соединении элементов
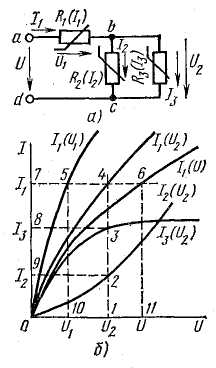
Рис. 6.6. К расчету нелинейной электрической цепи при смешанном соединении элементов
По заданным характеристикам I2(U2), I3(U3) параллельно соединенных элементов строится вольт-амперная характеристика участка цепи между точками b, c.
Для примера на рис. 6.6, б при напряжении U2 (отрезок 0-1) определены токи I2 (отрезок 1-2) и I3 (отрезок 1-3), а затем ток I1 = I2 + I3 (отрезок 1-4).
Далее строим вольт-амперную характеристику I1(U) всей цепи, учитывая, что участок цепи между точками b, c включен последовательно с нелинейным элементом на участке a-b. Для примера при токе I1 (отрезок 0-7) определены напряжения U1 (отрезок 7-5) и U2 (отрезок 7-4), а также общее напряжение U = U1 + U2 (отрезок 7-6).
После построения вольт-амперных характеристик порядок решения задачи зависит от ее условия. Пусть задано напряжение в цепи. Требуется определить токи в схеме и напряжения на участках.
Отложив на оси абсцисс отрезок 0-11, выражающий напряжение U, проведем линию 11-6 параллельно оси ординат до пересечения с кривой I1(U). Отрезком 11-6 определяется ток I1 в неразветвленной части цепи. Прямая, параллельная оси абсцисс, проведенная через точку 6, пересекает кривые I1(U1) и I2(U2) в точках 5 и 4. Отрезками 7-4 и 7-5 определяются напряжения U2 и U1 на участках. Напряжение U2 — общее для параллельно соединенных участков с токами I2 и I3. Для определения этих токов через точку 4 проводится прямая, параллельная оси ординат. Пересечение этой прямой с кривыми I2(U2) и I3(U2) в точках 2 и 3 дает отрезки 1-2 и 1-3, определяющие токи I2 и I3.
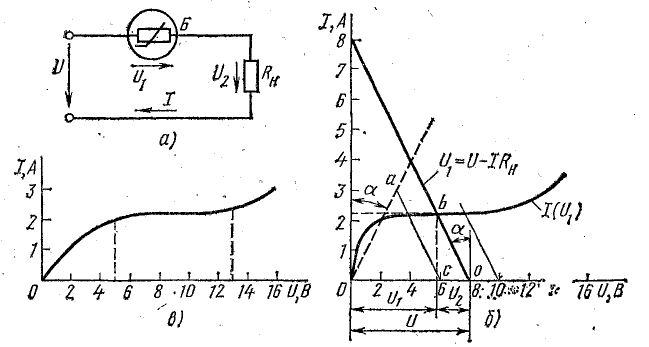
Рис. 6.7. К задаче 6.6
Задача 6.6.
Для поддержания постоянным тока нагрузки при колебаниях входного напряжения U последовательно с нагрузочным резистором Rн = 1 Ом (рис. 6.7, а) включен бареттер Б, вольт-амперная характеристика которого дана в табл. 6.2.
| U, В | 0 | 0,5 | 1 | 2 | 4 | 6 | 8 | 10 | 12 | 14 |
| I, А | 0 | 1 | 1,6 | 2 | 2,1 | 2,15 | 2,2 | 2,25 | 2,5 | 3,2 |
Построить график изменения тока в цепи при изменении входного напряжения
Решение. Определим ток в цепи и напряжение на участках графически. Для этого на одном чертеже построим вольт-амперные характеристики бареттера и нагрузочного резистора (рис. 6.7, б), выбрав предварительно масштабы по обеим осям.
Для построения на миллиметровой бумаге рекомендуются масштабы:
напряжений mu = 2 В/см; токов mi = 1 А/см.
Вольт-амперная характеристика нагрузочного резистора — прямая, проходящая через начало координат под углом α к оси токов (см. пунктир Oa на рис. 6.7,6). Определим угол 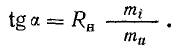
Ток в цепи и падение напряжения U1 связаны между собой двумя зависимостями: вольт-амперной характеристикой нелинейного элемента I(U1) и уравнением  которое при постоянной величине Rн изображается на графике прямой. Точка пересечения этой прямой с вольт-амперной характеристикой нелинейного элемента на графике определяет величины I и U1, удовлетворяющие обеим зависимостям.
которое при постоянной величине Rн изображается на графике прямой. Точка пересечения этой прямой с вольт-амперной характеристикой нелинейного элемента на графике определяет величины I и U1, удовлетворяющие обеим зависимостям.
Построим указанную прямую при заданной величине Rн = 1 Ом и входном напряжении V = 8 В. Для этого определим положение точек, в которых прямая пересекается с осями координат:
при I = 0
при U1 = 0

Прямая, построенная по двум точкам, пересекается с вольт-амперной характеристикой нелинейного элемента в точке b.
Спроектируем эту точку на оси координат и найдем величины тока и напряжения на участках: I = 2.2 А; U1 = 5,8 В; U2 = 2,2 В. Аналогично находим те же величины для других напряжений U, для чего прямую перемещаем параллельно самой себе (на рис. 6.7, б показаны такие характеристики для U = 6 и 10 В).
График I(U) для заданной цепи построен на рис. 6.7, в. Из графика видно, что при изменении входного напряжения в пределах от 5до 13 В ток в цепи остается практически постоянным.
Примеры упрощения схем нелинейных цепей
Расчеты разветвленных нелинейных электрических цепей при наличии в схеме произвольного количества элементов представляют значительные трудности. В зависимости от вида схемы принимается тот или другой путь расчета, но во всех случаях основой является систематическое упрощение схемы. Рассмотрим некоторые конкретные примеры.
Цепь с двумя узлами
Между двумя узлами 1 и 2 (рис. 6.8) включены три ветви, две из которых представляют собой последовательное соединение нелинейного сопротивления и постоянной э. д. с. 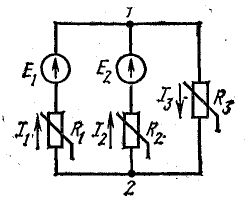
Рис. 6.8. Схема нелинейной электрической цепи с двумя узлами
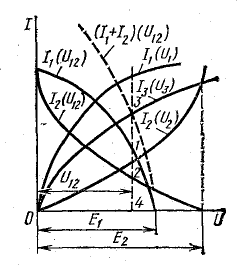
Рис. 6.9. К расчету нелинейной электрической цепи с двумя узлами
Нелинейные сопротивления заданы вольт-амперными характеристиками I1(U1); I2(U2); I3(U3) (рис. 6.9).
Построение кривых I1(U1.2) и I2(U1.2) проводится так: для ряда значений тока определяют разность э. д. с. и соответствующих значений напряжения; через полученные точки проводят кривые. Кривая I3(U1.2) совпадает с заданной кривой I3(U3), так как U1.2 = U3.
Далее строится кривая (I1 + I2)(U1.2); для ряда значений U1.2 определяют сумму токов I1 + I2, которая согласно первому закону Кирхгофа равна I3 : I1 + I2 = I3.
Поэтому точка 3, в которой пересекаются кривые (I1 + I2) и I3(U3), определяет величину тока I3 (отрезок 3-4). Опустив перпендикуляр к оси U через точку 3, находят другие величины: ток I1 — отрезок 1-4; ток I2 — отрезок 2-4; напряжение U1.2 — отрезок 0-4.
Заметим, что кривая (I1 + I2)(U1.2) является вольт-амперной характеристикой нелинейного активного двухполюсника, эквивалентного двум ветвям исходной схемы. Построение этой кривой означает замену двух ветвей (1 и 2) одной ветвью, что является упрощением заданной схемы. Нетрудно представить, что такой путь можно применить при наличии в схеме большего числа ветвей и постепенно привести ее к схеме простейшего активного нелинейного двухполюсника.
Цепь с одним нелинейным сопротивлением
Предположим, что в разветвленную цепь входит несколько линейных элементов, в том числе источники э. д. с., и одно нелинейное сопротивление (рис. 6.10, а). Ветвь с нелинейным сопротивлением можно выделить, а оставшуюся линейную часть представить в виде активного двухполюсника.
Включим в нелинейную ветвь э.д.с. E’ такой величины, чтобы ток в ней уменьшился до нуля. Для активного линейного двухполюсника такое состояние является режимом холостого хода, поэтому Е’ = Ux, где Ux — напряжение холостого хода.
Для того чтобы получить ток, т. е. возвратиться к первоначальному режиму, можно в нелинейную ветвь включить еще одну э. д. с. Е», равную по величине Е’, но направленную ей встречно (рис. 6.10., б). Можно сказать, что ток в нелинейной ветви вызывает только э. д. с. Е», а остальные э. д. с. (Е’ и активного двухполюсника) тока не вызывают и их можно из схемы исключить, накоротко замкнув точки, к которым эти источники присоединены.
В результате получается схема последовательного соединения пассивного линейного двухполюсника с активным нелинейным двухполюсником (рис. 6.10, в).
Отсюда следует порядок расчета первоначально заданной нелинейной цепи: 1) определяют напряжение холостого хода и входное сопротивление линейного двухполюсника (рис. 6.10, г); 2) находят, например графически, ток и напряжение в нелинейной ветви; 3) определяют токи в линейной части цепи, считая сопротивление нелинейной ветви R = U/I постоянным.
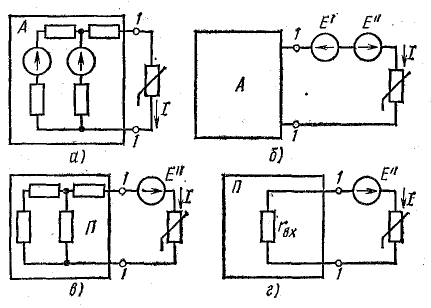
Рис. 6.10. К расчету разветвленной электрической цепи с одним нелинейным элементом
Цепь с двумя нелинейными сопротивлениями
В сложную цепь могут входить два нелинейных сопротивления, которые простым преобразованием не приводятся к одному сопротивлению (рис. 6.11, а).
Упрощение и расчет такой цепи можно осуществить в следующем порядке. Выделим нелинейные сопротивления, а оставшуюся часть цепи представим активным линейным четырехполюсником, у которого к первичным и вторичным зажимам присоединено по одному нелинейному сопротивлению.
В каждой нелинейной ветви можно провести преобразования, такие же как на рис. 6.10, и провести аналогичные рассуждения (рис. 6.11, б). В данном случае линейный четырехполюсник можно представить Т-образной схемой замещения и получить схему с двумя узлами, изображенную на рис. 6.11, в. 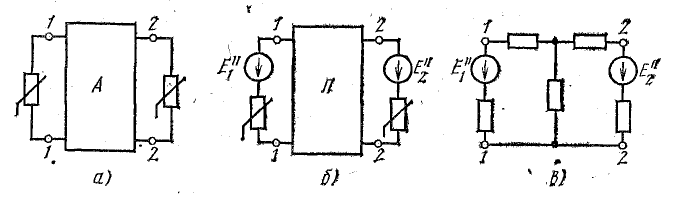
Рис. 6.11. К расчету разветвленной электрической цепи с двумя нелинейными элементами
Затем надо определить сопротивления Т-схемы четырехполюсника и решить задачу так, как указано в начале этого параграфа. При необходимости от Т-схемы четырехполюсника известными способами можно перейти к исходной схеме, считая при этом сопротивления нелинейных ветвей постоянными, так как токи в них найдены.
Подобный путь применяют для расчета цепей с тремя (и более) нелинейными сопротивлениями.
Метод последовательных приближений
Суть этого метода заключается в предварительном выборе ожидаемого результата и последовательной его проверке и уточнении.
Рассмотрим метод на примере относительно простой цепи последовательного соединения двух нелинейных сопротивлений рис. 6.4, а. Даны напряжение на зажимах цепи и вольт-амперные характеристики нелинейных элементов.
Ток в цепи по закону Ома 
где n — порядковый номер приближения.
Первое значение тока I1 в цепи выбирают ориентировочно, если имеются для этого какие-то основания, а если их нет, то произвольно. По вольт-амперным характеристикам определяют напряжения на нелинейных элементах U1 и U2 и затем по закону Ома — сопротивления R1 и R2:

По формуле (6.6) находят второе приближение тока:

По найденной величине тока I2 и вольт-амперным характеристикам снова определяют напряжения на нелинейных элементах и их сопротивления, а затем опять находят ток и так до тех пор, пока результат на начнет практически повторяться. Обычно достаточно точный ответ достигается после 4-5 повторений расчета, если процесс приближений обладает сходимостью. В случае расходящегося процесса задачу следует решать на основе уравнения для другой величины [вместо (6.6)], например для напряжения на одном из нелинейных элементов 
Задача 6.7.
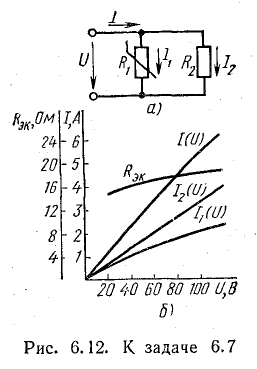
Лампа накаливания включена параллельно с линейным резистором R2 = 30 Ом (рис. 6.12, а). Построить зависимость эквивалентного сопротивления Rэк цепи от напряжения U на его зажимах.
Методом последовательных приближений определить напряжение U при токе в неразветвленной части цепи I = 5 А. Вольт-амперная характеристика лампы задана в табл. 6.3.
| U, В | 0 | 20 | 40 | 60 | 80 | 100 | 120 |
| I, А | 0 | 0,6 | 1,1 | 1,5 | 1,85 | 2,15 | 2,4 |
Решение. Построим вольт-амперные характеристики элементов цепи. На рис. 6.12, б: I1(U) — характеристика лампы и I2(U) — характеристика резистора R2. Сложив ординаты этих характеристик при различных значениях напряжения, получим вольт-амперную характеристику всей цепи, т. е. зависимость тока в неразветвленной части цепи от приложенного напряжения I(U). Эквивалентное сопротивление схемы найдем как отношение Rэк = U/I для различных значений приложенного напряжения.
Результаты вычислений приведены на графике рис. 6.12, б.
Нелинейные электрические цепи постоянного тока
Нелинейными называются цепи, в которые включены нелинейные элементы (нэ).
Элемент электрической цепи, сопротивление которого зависит от чины и направления тока в нем или от напряжения, называется нелинейным. Нелинейными такие элементы называются потому, что их вольт-амперная характеристика (т. е. зависимость тока от напряжения, приложенного к элементу)  — нелинейная. Виды нелинейной зависимости показаны рис. 5.26, 5.36, 5.46 и др.
— нелинейная. Виды нелинейной зависимости показаны рис. 5.26, 5.36, 5.46 и др.
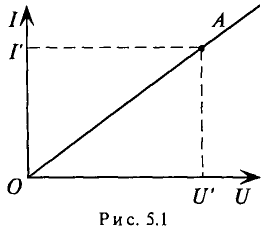
Примерами нелинейных элементов могут служить электронные газонаполненные лампы, полупроводниковые приборы, ламп накаливания и пр. нелинейную цепь наряду с нелинейными элементами могут быть включены линейные. Сопротивление линейных элементов практически не зависит от тока или напряжения (резистор). Вольт-амперная характеристика линейного элемента — прямая линия, ходящая через начало координат, точку О (рис. 5.1).
Вторую точку (точку А) для построения вольт-амперной характеристики линейного элемента определяют вычислением тока Г в линейном менте при произвольно выбранном напряжении U’, приложенном к этому элементу, т.е.  , где
, где  — заданное сопротивление линейного элемента — величина постоянная, аналитический расчет нелинейных цепей весьма сложен, так как противление нелинейного элемента — непостоянная величина, зависящая от величины тока. Таким образом, в уравнении закона Ома
— заданное сопротивление линейного элемента — величина постоянная, аналитический расчет нелинейных цепей весьма сложен, так как противление нелинейного элемента — непостоянная величина, зависящая от величины тока. Таким образом, в уравнении закона Ома  две переменные величины. Поэтому при расчете линейных цепей к нелинейным элементам не применим закон а ни для участка, ни для замкнутой нелинейной цепи.
две переменные величины. Поэтому при расчете линейных цепей к нелинейным элементам не применим закон а ни для участка, ни для замкнутой нелинейной цепи.
Для расчета нелинейных цепей рационально использовать графо-аналитический метод, который предусматривает построение суммарной вольт-амперной характеристики цепи. По суммарной характеристике и характеристикам элементов определяются искомые величины (обычно токи и напряжения).
Построение суммарной вольт-амперной характеристики нелинейной цепи зависит от схемы соединения элементов нелинейной цепи и производится по заданным вольт-амперным характеристикам нелинейных элементов и построенным характеристикам линейных элементов, если они включены в цепь.
Кроме того, если в нелинейной цепи имеется линейный элемент, то расчет нелинейной цепи можно производить построением так называемой нагрузочной характеристики (рис. 5.36).
Неразветвленная нелинейная цепь
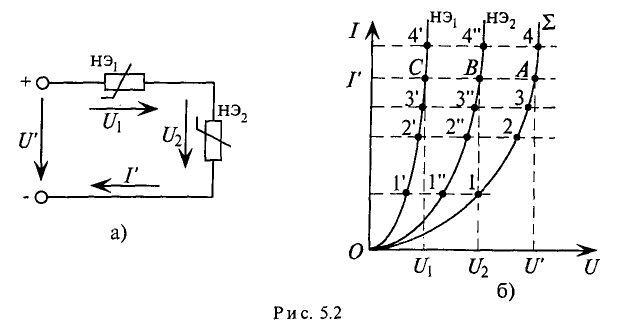
В неразветвленной нелинейной электрической цепи все элементы соединены последовательно и по всем элементам проходит одинаковый ток (рис. 5.2а).
Для расчета цепи с последовательно соединенными нелинейными элементами  по заданным вольт-амперными характеристикам этих элементов строится суммарная вольт-амперная характеристика нелинейной цепи (рис. 5.26).
по заданным вольт-амперными характеристикам этих элементов строится суммарная вольт-амперная характеристика нелинейной цепи (рис. 5.26).
При последовательном соединении элементов для построения суммарной вольт-амперной характеристики суммируются абсциссы (напряжения) вольт-амперных характеристик элементов при различных токах (например, в точках 1, 2, 3, 4 рис. 5.26).
Зная напряжение, приложенное к цепи ( ), по суммарной вольт-амперной характеристике (точка А) определяем ток в нелинейной цепи (
), по суммарной вольт-амперной характеристике (точка А) определяем ток в нелинейной цепи ( ). Этот ток создает падение напряжения на пер-элементе U1 (точка С) и на втором элементе U2 (точка В). и же задан ток
). Этот ток создает падение напряжения на пер-элементе U1 (точка С) и на втором элементе U2 (точка В). и же задан ток  в рассматриваемой цепи, то по суммарной вольт-амперной характеристике можно найти напряжение цепи (точка А) и напряжение на элементах
в рассматриваемой цепи, то по суммарной вольт-амперной характеристике можно найти напряжение цепи (точка А) и напряжение на элементах  (точки С и В). нелинейных элементов различают статическое
(точки С и В). нелинейных элементов различают статическое  и динамиков
и динамиков  сопротивления.
сопротивления.
Статическое сопротивление  — это сопротивление нелинейного элемента в режиме работы цепи, т. е. сопротивление нелинейного элемента в определенной точке его вольт-амперной характеристики.
— это сопротивление нелинейного элемента в режиме работы цепи, т. е. сопротивление нелинейного элемента в определенной точке его вольт-амперной характеристики.

Вычислить статические сопротивления нелинейных элементов в режиме работы рассматриваемой цепи, т. е. сопротивления для С и В вольт-амперных характеристик (при токе  рис 5.26), можно следующим образом:
рис 5.26), можно следующим образом:
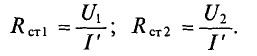
Динамическое сопротивление нелинейных элементов ( ) в режиме работы цепи определяется как
) в режиме работы цепи определяется как

где  бесконечно малое приращение напряжения (определяет-по вольт-амперным характеристикам нелинейных элементов чек С и В), a dl — бесконечно малое приращение тока у этих чек.
бесконечно малое приращение напряжения (определяет-по вольт-амперным характеристикам нелинейных элементов чек С и В), a dl — бесконечно малое приращение тока у этих чек.
Вели в неразветвленную нелинейную цепь включен линейный элемент с заданным сопротивлением R, то для расчета такой нелинейной цепи можно произвести суммирование абсцисс (напряжений) всех элементов цепи, включая линейный, построив предварительно его вольт-амперную характеристику в той же системе ординат (рис. 5.1).
По суммарной вольт-амперной характеристике нелинейной пи определяется режим работы цепи и ее элементов. Для расчета нелинейной цепи с последовательно включенным линейным элементом с сопротивлением R (рис. 5.3а) можно воспользоваться построением нагрузочной характеристики рис. 5.36).
Нагрузочная характеристика представляет собой прямую линию, проведенную через две точки А и В (рис. 5.36). Точка А расположена на оси ординат (ток). Точка В- на оси абсцисс (напряжение).
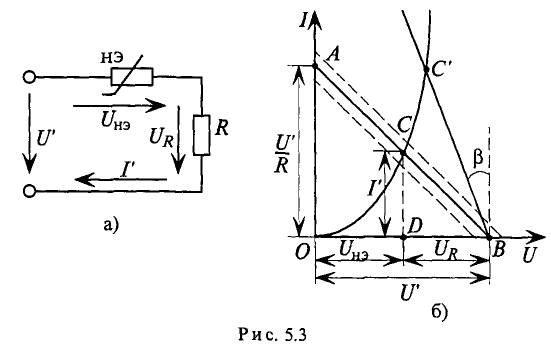
Построение нагрузочной характеристики осуществляется с использованием двух уравнений (5.3 и 5.4) для рассматриваемой цепи в системе координат 

Откуда 
Точка В соответствует величинам  (см. (5.3)). Точка А соответствует величинам
(см. (5.3)). Точка А соответствует величинам  (см. (5.4)). При построении в тех же координатных осях заданной вольт-амперной характеристики нелинейного элемента отмечается точка пересечения С этих характеристик, которая является единственно возможной при заданном режиме работы цепи:
(см. (5.4)). При построении в тех же координатных осях заданной вольт-амперной характеристики нелинейного элемента отмечается точка пересечения С этих характеристик, которая является единственно возможной при заданном режиме работы цепи:
- отрезок DC — ток цепи ,
- отрезок OD — напряжение на нелинейном элементе ,
- отрезок DB — напряжение на линейном элементе
 ,
, ,
,
Такой метод расчета неразветвленных нелинейных цепей называется методом пересечений.
На рис. 5.36 можно проследить изменения режима работы цепи ( ) при изменениях напряжения сети U’ (пунктирные линии). На том же рисунке показаны изменения режима работы цепи при изменении сопротивления линейного элемента R (перемещение точки С’ на рис. 5.36).
) при изменениях напряжения сети U’ (пунктирные линии). На том же рисунке показаны изменения режима работы цепи при изменении сопротивления линейного элемента R (перемещение точки С’ на рис. 5.36).
Если точка А, соответствующая измененному значению напряжения сети U’ или сопротивления линейного элемента R (см. (5.4)), выходит за пределы графика (рис. 5.36), то определяют  , который нагрузочная характеристика (прямая) составляет вертикалью, проведенной из точки В (на оси U), соответствующей напряжению сети U’, т. е.
, который нагрузочная характеристика (прямая) составляет вертикалью, проведенной из точки В (на оси U), соответствующей напряжению сети U’, т. е.
 — принятый на графике масштаб тока;
— принятый на графике масштаб тока;  — принятый на графике масштаб напряжения; U» — произвольно выбранное напряжение (например, U’); I» — ток, соответствующий напряжению U» и сопротивлению R», т.е.:
— принятый на графике масштаб напряжения; U» — произвольно выбранное напряжение (например, U’); I» — ток, соответствующий напряжению U» и сопротивлению R», т.е.:

Тогда нагрузочную характеристику из точки В доводят только до сечения с вольт-амперной характеристикой нелинейного мента (точка С’ рис. 5.36) и определяют режим работы цепи, соответствующий измененному значению сопротивления линейного элемента R или напряжения сети V.
Разветвленная нелинейная цепь
В разветвленной нелинейной электрической цепи нелинейные менты могут быть соединены параллельно. При параллельном соединении нелинейных элементов напряжение на всех элементах будет одинаковым.
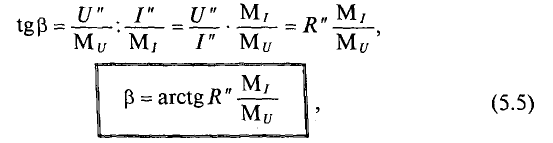
Для расчета цепи с параллельным соединением нелинейных ментов  (рис. 5.4а) строится суммарная вольт-амперная характеристика цепи по заданным вольт-амперным характеристикам нелинейных элементов, при этом суммируются ординаты (токи), соответствующие различным значениям напряжений (точки 1, 2, 3, 4 на рис. 5.46).
(рис. 5.4а) строится суммарная вольт-амперная характеристика цепи по заданным вольт-амперным характеристикам нелинейных элементов, при этом суммируются ординаты (токи), соответствующие различным значениям напряжений (точки 1, 2, 3, 4 на рис. 5.46).
При заданном значении тока в неразветвленной части нелинейной цепи Г по суммарной вольт-амперной характеристике (точка А) можно определить напряжение цепи U’. Это напряжение создает ток в первом элементе  (точка С) и во втором элементе
(точка С) и во втором элементе  (точка В).
(точка В).
Если задано напряжение U’, приложенное к элементам, то по суммарной вольт-амперной характеристике определяется ток в неразветвленной части цепи (точка А), а по вольт-амперным характеристикам элементов определяются токи  (точки С и В рис. 5.46).
(точки С и В рис. 5.46).
Включение в нелинейную цепь линейного элемента не меняет характера и порядка расчета.
Нелинейная цепь со смешанным соединением элементов
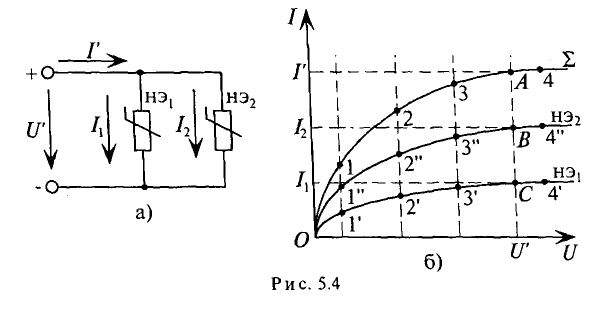
Расчет нелинейной цепи при смешанном соединении элементов (в общем виде) рассмотрен на примере 5.1 (рис. 5.5).
Пример 5.1
По заданному напряжению цепи U’ требуется определить токи  , напряжения на участках
, напряжения на участках  (рис. 5.5а), а также сопротивления нелинейных элементов в заданном режиме работы цепи. Заданы вольт-амперные характеристики нелинейных элементов
(рис. 5.5а), а также сопротивления нелинейных элементов в заданном режиме работы цепи. Заданы вольт-амперные характеристики нелинейных элементов  (рис. 5.56) и сопротивление линейного элемента
(рис. 5.56) и сопротивление линейного элемента  .
.
Решение
По заданному сопротивлению Я линейного элемента строится вольт-амперная характеристика этого элемента (см. рис. 5.1). Линейный элемент с сопротивлением включен параллельно с нелинейным элементом  , и суммарная вольт-амперная характеристика для участка АВ цепи (
, и суммарная вольт-амперная характеристика для участка АВ цепи ( AB) строится так же, как на рис. 5.46 суммируются ординаты (токи) характеристик
AB) строится так же, как на рис. 5.46 суммируются ординаты (токи) характеристик  и R).
и R).
Участок АВ соединен последовательно с нелинейным элементом . Суммарная вольт-амперная характеристика цепи (I) строится так же, как на рис. 5.26.
Напряжение цепи U’, по суммарной характеристике цепи К) определяется ток в неразветвленной части цепи рис. 5.56). Этот ток создает падение напряжения  (точка С) и на параллельном участке (точка Е).
(точка С) и на параллельном участке (точка Е).
Напряжение на участке АВ (UAB) в разветвленной цепи создает А (точка D) и (точка L).
Определив напряжения и токи нелинейных элементов, можно определить статические сопротивления этих элементов в заданном режиме работы цепи
Таким образом, по вольт-амперным характеристикам соединен-смешанно элементов и их суммарным характеристикам можно определить все параметры нелинейной цепи ( ), если задан хотя бы один из этих параметров (рис. 5.56).
), если задан хотя бы один из этих параметров (рис. 5.56).
Стабилизаторы тока и напряжения
Есть такие нелинейные элементы, вольт-амперная характеристика которых имеет участки, параллельные оси абсцисс или оси ординат (рис. 5.6). Такие нелинейные элементы применяют в качестве стабилизаторов тока (рис. 5.6а) и стабилизаторов напряжения ис. 5.66).
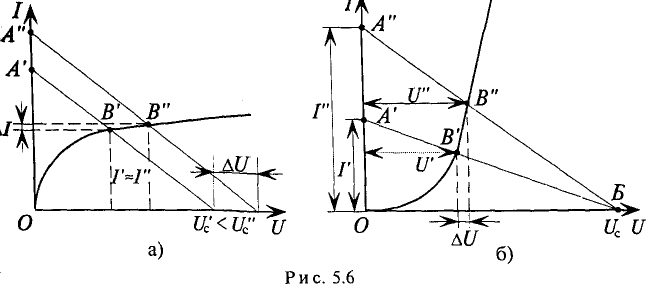
В качестве стабилизатора тока можно использовать, например бареттер (стальная нить в атмосфере водорода). На участке В’В’ (рис. 5.6а) характеристика бареттера почти параллельна оси абсцисс. Если бареттер включить последовательно с участком (io цепи (рис. 5.8), то ток  цепи почти не изменяется при изменении напряжения или сопротивления (рис. 5.6а) — бареттер стабилизирует ток в цепи.
цепи почти не изменяется при изменении напряжения или сопротивления (рис. 5.6а) — бареттер стабилизирует ток в цепи.
Эффективность стабилизации характеризует коэффициент стабилизации, показывающий, во сколько раз относительное изменение тока  меньше относительного изменения напряжения
меньше относительного изменения напряжения  :
:
Для стабилизации напряжения применяют газоразрядные или полупроводниковые (кремниевые) стабилизаторы. Рабочий участок В’В» вольт-амперной характеристики стабилизатора напряжения почти параллелен оси ординат (рис. 5.66). Стабилизатор напряжения включается параллельно сопротивлению  , на котором он стабилизирует напряжение.
, на котором он стабилизирует напряжение.
Последовательно с разветвленным участком (ab) включается балластное сопротивление  (рис. 5.7). Как видно из рис. 5.66, изменение балластного сопротивления в определенных пределах от
(рис. 5.7). Как видно из рис. 5.66, изменение балластного сопротивления в определенных пределах от  почти не вызывает изменения напряжения на стабилизаторе и, следовательно, на нагрузке R (Uaь на рис. 5.7).
почти не вызывает изменения напряжения на стабилизаторе и, следовательно, на нагрузке R (Uaь на рис. 5.7).
Пример 5.2
Для стабилизации напряжения и тока накала электронной лампы (4 В; I А) включен бареттер Б (рис. 5.8а), вольт-амперная характеристика которого приведена на рис. 5.86.
Определить все токи и напряжения на бареттере U1 и нити накала U2, если напряжение сети  , а сопротивление
, а сопротивление  . Определить пределы изменения напряжений сети, при которых ток цепи
. Определить пределы изменения напряжений сети, при которых ток цепи  остается практически неизменным.
остается практически неизменным.
Решение
Масштаб напряжения на графике 
Масштаб тока на графике принят 
Нагрузочная характеристика строится в координатах:
 , где сопротивление нити накала лампы
, где сопротивление нити накала лампы  Ом.
Ом.
Следовательно, точка пересечения вольт-амперной характеристики бареттера и нагрузочной характеристики В (рис. 5.86) сет координаты  , а ток цепи
, а ток цепи  . Напряжение R
. Напряжение R  , а токи
, а токи 
Нагрузочная характеристика проведена под углом  к оси орди-т. е.
к оси орди-т. е.

Нагрузочные характеристики, соответствующие пределам изменил напряжений сети, при которых ток цепи  остается практики неизменным (
остается практики неизменным ( ), проводятся параллельно основной нагрузочной характеристике под углами
), проводятся параллельно основной нагрузочной характеристике под углами  к оси ординат.
к оси ординат.
Таким образом, как следует из графиков рис. 5.86, эти напряжения соответственно равны

Определение нелинейных электрических цепей переменного тока
Нелинейные элементы
Нелинейными электрическими цепями переменного тока называются цепи, в состав которых входят один или несколько нелинейных сопротивлений (нелинейных элементов) переменного тока.
Характерной чертой нелинейных элементов переменного тока являются нелинейная вольт-амперная, кулон-вольтовая, вебер-амперная и другие характеристики.
Переменному току оказывают сопротивление активные сопротивления, индуктивности и емкости. В соответствии с этим нелинейные сопротивления переменного тока могут быть разделены на три группы: 1) группа нелинейных активных сопротивлений; 2) группа нелинейных индуктивных сопротивлений; 3) группа нелинейных емкостных сопротивлений.
Каждая из этих групп сопротивлений подразделяется на управляемые и неуправляемые.
- В качестве управляемых нелинейных активных сопротивлений широкое распространение получили электронные и полупроводниковые приборы, магнитные усилители и другие устройства. Неуправляемыми нелинейными активными сопротивлениями являются электрическая дуга, полупроводниковые выпрямители, лампы накаливания и др. Нелинейные элементы этой группы способствуют созданию несинусоидальных токов в электрических цепях.
- Под нелинейными индуктивными сопротивлениями, или иначе нелинейными индуктивностями, понимают катушки с ферромагнитными сердечниками, для которых зависимость магнитного потока в сердечнике от тока в катушке нелинейна. Катушка с ферромагнитным сердечником в цепи переменного тока искажает форму кривой тока, т. е. является генератором несинусоидального тока. Катушку со стальным сердечником называют дросселем (рис. 19.4).
- Для нелинейных конденсаторов зависимость заряда Q на обкладках от напряжения, приложенного к конденсатору, нелинейна. Нелинейные конденсаторы называют варикоидами или вари капами. Пространство между обкладками нелинейного конденсатора заполнено сегнетодиэлектриком, диэлектрическая проницаемость которого зависит от напряженности электрического поля между обкладками конденсатора. Сегнетодиэлектрики обладают гистерезисом, т.е. отставанием изменения электрического смещения в диэлектрике от изменения электрического поля в нем.
Такие явления, как выпрямление переменного тока в постоянный, стабилизация напряжения, умножение и деление частоты, получение сигналов различной формы и т. д., можно получить только в нелинейных цепях переменного тока.
В настоящей главе рассматривается работа двух нелинейных элементов: вентили (1-я группа нелинейных активных сопротивлений) и катушки с ферромагнитным сердечником (2-я группа нелинейных индуктивных сопротивлений).
Выпрямители — источники несинусоидального тока
Выпрямителями называют аппараты, преобразующие переменный ток в постоянный.
Основным элементом любого выпрямителя является электрический вентиль. Электрический вентиль обладает малым сопротивлением в прямом направлении и большим в обратном направлении. Вентиль имеет нелинейную вольт-амперную характеристику (рис. 19.1), поскольку обладает практически односторонней проводимостью. Графическое изображение электрического вентиля в электрических схемах и положительное направление прямого напряжения и тока показано на рис. 19.1а.
Вентиль, сопротивление которого в прямом направлении равно нулю, а в обратном — бесконечно большое, считается идеальным вентилем. Характеристика идеального вентиля дана на рис. 19.1б. Вентиль, сопротивлением которого в прямом направлении пренебречь нельзя, а обратным током можно пренебречь, имеет вольт-амперную характеристику, изображенную на рис. 19.1в. Вольт-амперная характеристика реального полупроводникового вентиля изображена на рис. 19.1г. 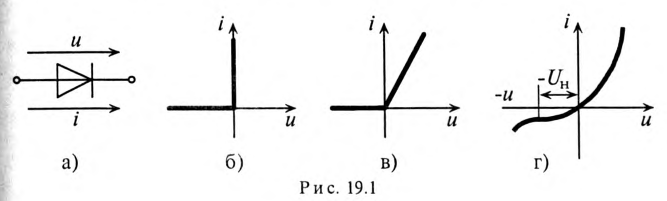
Как видно, если к реальному вентилю приложено увеличивающееся по величине обратное напряжение  то его ток в обратном направлении увеличивается незначительно. Однако когда это обратное напряжение превышает номинальное
то его ток в обратном направлении увеличивается незначительно. Однако когда это обратное напряжение превышает номинальное  обратный ток становится ощутимым и при некотором обратном предельном напряжении вентиль теряет свои вентильные свойства.
обратный ток становится ощутимым и при некотором обратном предельном напряжении вентиль теряет свои вентильные свойства.
Основными параметрами вентилей наряду с вольт-амперной характеристикой являются допустимая температура, плотность тока и допустимое обратное напряжение.
В выпрямителях вентиль включается по различным схемам.
В схеме однополупериодного выпрямителя вентиль включается последовательно с потребителем R, ток которого необходимо выпрямить (рис. 19.2а). 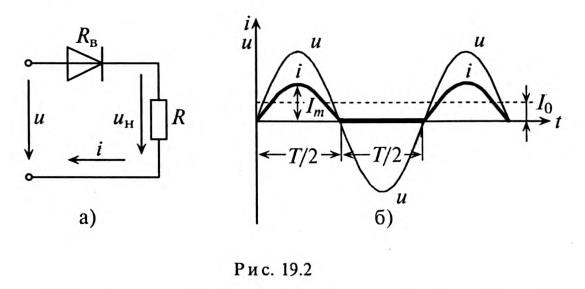
Если к цепи, изображенной на рис. 19.2а, приложено синусоидальное напряжение  (и обратным током вентиля можно пренебречь), то ток в положительный полупериод изменяется также по синусоидальному закону:
(и обратным током вентиля можно пренебречь), то ток в положительный полупериод изменяется также по синусоидальному закону:

В течение же отрицательного полупериода напряжения  тока в цепи нет, так как предполагается
тока в цепи нет, так как предполагается  Таким образом, в рассматриваемой цепи создается однополупериодное выпрямление синусоидального тока (рис. 19.2б). При однополупериодном выпрямлении образуется значительная пульсация тока, т.е. большая переменная составляющая (гармоника) выпрямленного тока и незначительная величина среднего значения (постоянная составляющая) этого тока
Таким образом, в рассматриваемой цепи создается однополупериодное выпрямление синусоидального тока (рис. 19.2б). При однополупериодном выпрямлении образуется значительная пульсация тока, т.е. большая переменная составляющая (гармоника) выпрямленного тока и незначительная величина среднего значения (постоянная составляющая) этого тока  (см. кривую 5 таблицы 18.1).
(см. кривую 5 таблицы 18.1).
Таким образом, на сопротивлении R в результате выпрямления синусоидального напряжения и создается несинусоидальный ток и несинусоидальное напряжение 
Если вентили включены по мостовой схеме (рис. 19.3а) и к мосту подведено синусоидальное напряжение  то по сопротивлению потребителя R проходит несинусоидальный пульсирующий ток, полученный в результате двухполупериодного выпрямления (рис. 19.3б).
то по сопротивлению потребителя R проходит несинусоидальный пульсирующий ток, полученный в результате двухполупериодного выпрямления (рис. 19.3б). 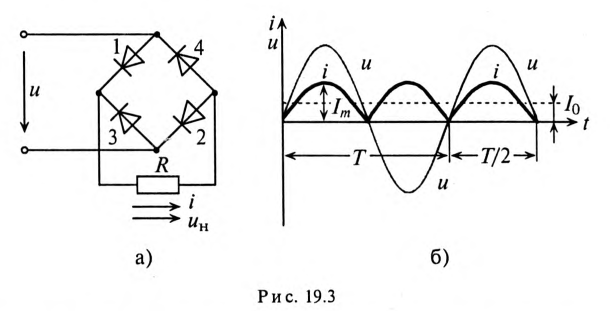
В положительный полупериод синусоидального напряжения и ток проходит через вентили 1, 2 и через потребитель слева направо (рис. 19.3а). В отрицательный полупериод напряжения и ток проходит через вентили 3, 4 и через потребитель также слева направо. Таким образом, ток через потребитель изменяется по величине, но не меняется по направлению (рис. 19.3б), т.е. через потребитель проходит пульсирующий ток, который складывается из постоянной составляющей и четных гармоник. Таким же будет и напряжение  на потребителе (см. кривую 6 таблицы 18.1). При двухполупериодном выпрямлении постоянная составляющая несинусоидального тока и напряжения больше, чем при однополупериодном выпрямлении, а пульсации, т.е. гармоники, меньше.
на потребителе (см. кривую 6 таблицы 18.1). При двухполупериодном выпрямлении постоянная составляющая несинусоидального тока и напряжения больше, чем при однополупериодном выпрямлении, а пульсации, т.е. гармоники, меньше.
При выпрямлении трехфазного тока (см. кривую 7 таблицы 18.1) несинусоидальный ток раскладывается на постоянную составляющую и гармоники, кратные трем, т. е. 3, 6, 9 и т.д. При этом постоянная составляющая тока (напряжения) на потребителе увеличивается, а пульсации уменьшаются (по сравнению с однофазным током). Для уменьшения пульсаций на потребителе в любой схеме соединения вентилей используются электрические фильтры (см. § 18.7).
Катушка с ферромагнитным сердечником
Наиболее распространенным нелинейным элементом переменного тока в электрических машинах, трансформаторах и других аппаратах является катушка со стальным сердечником (рис. 19.4). 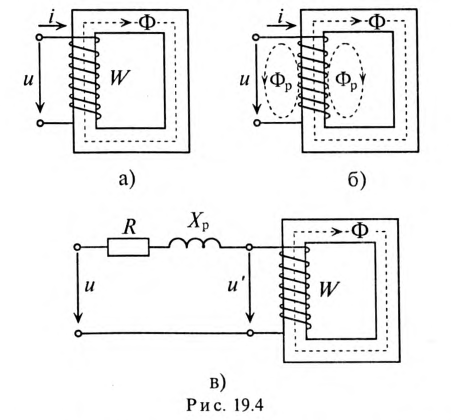
Если магнитный поток в сердечнике изменяется по синусоидальному закону  то при отсутствии рассеяния он индуктирует в катушке, расположенной на сердечнике, ЭДС самоиндукции
то при отсутствии рассеяния он индуктирует в катушке, расположенной на сердечнике, ЭДС самоиндукции

Если пренебречь активным сопротивлением катушки, то напряжение, приложенное к ней, равно по величине и противоположно по знаку ЭДС самоиндукции, определяемой по (11.9):

где  , а действующее значение напряжения
, а действующее значение напряжения
или 
Если к катушке со стальным сердечником приложено синусоидальное напряжение, то в сердечнике возникает синусоидальный магнитный поток.
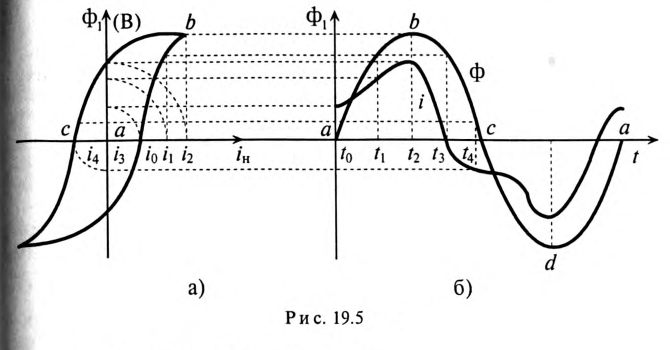
Ток в катушке при этом оказывается несинусоидальным. Это связано с нелинейной зависимостью между магнитим потоком и током  На рис. 19.5а показана петля гистере-1иса, изображающая эту зависимость.
На рис. 19.5а показана петля гистере-1иса, изображающая эту зависимость.
Для каждого момента времени 
 по петле гистерезиса находят значение тока и откладывают его на ординате магнитного потока (смотри пунктирные линии на рис. 19.5). При увеличении магнитного потока пользуются участком ab петли гистерезиса, при уменьшении — участком be и т. д.
по петле гистерезиса находят значение тока и откладывают его на ординате магнитного потока (смотри пунктирные линии на рис. 19.5). При увеличении магнитного потока пользуются участком ab петли гистерезиса, при уменьшении — участком be и т. д.
Как видно (рис. 19.56), кривая тока при синусоидальном магнитном потоке несинусоидальна.
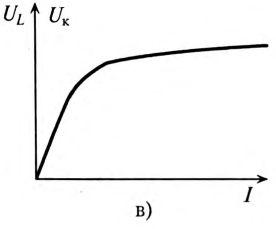
Кривая намагничивания ферромагнитного материала (рис. 8.3) выражает зависимость индукции В в ферромагнитном материале от напряженности Я магнитного поля в катушке. Напряженность Н в катушке пропорциональна току I в катушке. Магнитный поток в ферромагнитном материале  связан с напряжением
связан с напряжением  , приложенным к катушке, прямой пропорциональностью (19.1). Следовательно, основную кривую намагничивания ферромагнитного материала магнитопровода
, приложенным к катушке, прямой пропорциональностью (19.1). Следовательно, основную кривую намагничивания ферромагнитного материала магнитопровода  можно считать вольт-амперной характеристикой катушки с сердечником из ферромагнитного материала (рис. 8.3), если изобразить ее в координатах
можно считать вольт-амперной характеристикой катушки с сердечником из ферромагнитного материала (рис. 8.3), если изобразить ее в координатах  и I (рис. 19.5в). Таким образом, катушка с ферромагнитным сердечником является нелинейным элементом переменного тока, т. е. источником несинусоидальности.
и I (рис. 19.5в). Таким образом, катушка с ферромагнитным сердечником является нелинейным элементом переменного тока, т. е. источником несинусоидальности.
Мощность потерь. Векторная диаграмма катушки со стальным сердечником
При расчете цепи катушки со стальным сердечником несинусоидальный намагничивающий ток  часто заменяют эквивалентным синусоидальным, который имеет то же действующее значение, что и несинусоидальный. При этой замене пользуются поправочным коэффициентом
часто заменяют эквивалентным синусоидальным, который имеет то же действующее значение, что и несинусоидальный. При этой замене пользуются поправочным коэффициентом  зависящим от формы кривой тока, которая в свою очередь зависит от максимального значения индукции в сердечнике
зависящим от формы кривой тока, которая в свою очередь зависит от максимального значения индукции в сердечнике 
Значение коэффициента  для электротехнической стали при индукции, не превышающей
для электротехнической стали при индукции, не превышающей 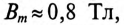 принимается равным единице. При больших значениях магнитной индукции поправочный коэффициент можно найти по графику (рис. 19.6).
принимается равным единице. При больших значениях магнитной индукции поправочный коэффициент можно найти по графику (рис. 19.6).
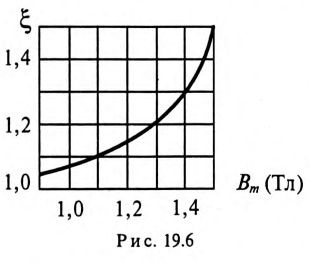
При синусоидальном токе векторная диаграмма для катушки (без активного сопротивления) со стальным сердечником (без рассеяния) может быть построена как для идеальной индуктивности (рис. 11.4б), т. е. ток отстает от напряжения на угол 90°.
Если учесть потери на циклическое перемагничивание в сердечнике  и на вихревые токи
и на вихревые токи  т.е. потери в стали
т.е. потери в стали  то ток в катушке со стальным сердечником отстает от напряжения на угол
то ток в катушке со стальным сердечником отстает от напряжения на угол  (рис. 19.7а). При этом появляется активная составляющая тока
(рис. 19.7а). При этом появляется активная составляющая тока

совпадающая по фазе с напряжением, и реактивная составляющая тока

Реактивная составляющая тока, совпадающая по фазе с магнитным потоком и намагничивающая сердечник, называется намагничивающим током катушки.
Угол  на который ток
на который ток  опережает по фазе магнитный поток Ф (рис. 19.7а), называется углом потерь
опережает по фазе магнитный поток Ф (рис. 19.7а), называется углом потерь

Потери в стали (магнитные потери) можно определить выражением

где G — масса ферромагнитного сердечника, кг;  — удельная мощность потерь в стали, Вт/кг.
— удельная мощность потерь в стали, Вт/кг.
Удельную мощность потерь вычисляют по формуле

где  — потери в стали при индукции
— потери в стали при индукции  1 Тл и частоте
1 Тл и частоте  — максимальное значение индукции.
— максимальное значение индукции.
Значения  для различных марок электротехнической стали даны в Приложении 8.
для различных марок электротехнической стали даны в Приложении 8.
Если не пренебрегать активным сопротивлением катушки R, то падение напряжения на этом сопротивлении  совпадает по фазе с током
совпадает по фазе с током  На активном сопротивлении возникают потери мощности, которые являются электрическими потерями и называются потерями в меди
На активном сопротивлении возникают потери мощности, которые являются электрическими потерями и называются потерями в меди  Эти потери складываются с магнитными и создают суммарные потери в катушке со стальным сердечником
Эти потери складываются с магнитными и создают суммарные потери в катушке со стальным сердечником  Суммарные потери Р влияют на угол потерь
Суммарные потери Р влияют на угол потерь  и на активную составляющую тока катушки
и на активную составляющую тока катушки  так как
так как 
Большая часть магнитного потока, т. е. основной поток Ф, замыкается в сердечнике, а незначительная часть потока  рассеивается (рис. 19.46). Поток рассеяния
рассеивается (рис. 19.46). Поток рассеяния  индуктирует в катушке ЭДС рассеяния
индуктирует в катушке ЭДС рассеяния  где
где  — индуктивность рассеяния. На преодоление ЭДС рассеяние в напряжении, приложенном к катушке, появляется составляющая
— индуктивность рассеяния. На преодоление ЭДС рассеяние в напряжении, приложенном к катушке, появляется составляющая  которая опережает ток на угол 90°. Поток рассеяния
которая опережает ток на угол 90°. Поток рассеяния  совпадает по фазе с током.
совпадает по фазе с током.
Следовательно, напряжение на зажимах катушки со стальным сердечником складывается из напряжения  создается основным магнитным потоком Ф, падения напряжения на активном сопротивлении катушки
создается основным магнитным потоком Ф, падения напряжения на активном сопротивлении катушки  и напряжения
и напряжения  т.е.
т.е.  Это выражение используется при построении векторной диаграммы катушки со стальным сердечником (рис. 19.7б).
Это выражение используется при построении векторной диаграммы катушки со стальным сердечником (рис. 19.7б).
Схема замещения
Эквивалентная схема катушки со стальным сердечником изображена на рис. 19.4в. На эквивалентной схеме выделены активное сопротивление R и индуктивное сопротивление рассеяния  Оставшуюся катушку с сердечником можно считать идеальной.
Оставшуюся катушку с сердечником можно считать идеальной.
Напряжение  для идеальной катушки можно представить суммой падений напряжений на активном сопротивлении
для идеальной катушки можно представить суммой падений напряжений на активном сопротивлении  и индуктивном
и индуктивном 
Эти соображения легли в основу построения схемы замещения катушки со стальным сердечником (рис. 19.8а).
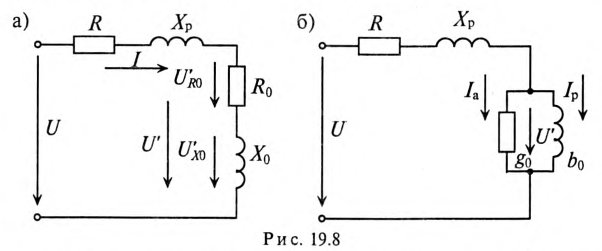
Реальная катушка (рис. 19.4а) и схема ее замещения (рис. 19.8б) при одинаковых напряжениях на зажимах U имеют одинаковые токи и мощности.
Активная составляющая тока определяет активную проводимость идеальной катушки 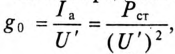 а намагничивающий ток — реактивную проводимость
а намагничивающий ток — реактивную проводимость  На рис. 19.86 показана схема замещения катушки со стальным сердечником с учетом этих проводимостей.
На рис. 19.86 показана схема замещения катушки со стальным сердечником с учетом этих проводимостей.
Пример 19.1
На среднем стержне Ш-образного магнитопровода (рис. 19.9), выполненного из листовой  стали Э42 (1512) с воздушным зазором
стали Э42 (1512) с воздушным зазором  расположена обмотка, к которой подведено напряжение U= 220 В при частоте
расположена обмотка, к которой подведено напряжение U= 220 В при частоте  10 % объема сердечника заполнено изоляцией. Активным сопротивлением обмотки и рассеянием можно пренебречь. Размеры магнитопровода указаны в мм.
10 % объема сердечника заполнено изоляцией. Активным сопротивлением обмотки и рассеянием можно пренебречь. Размеры магнитопровода указаны в мм. 
Определить число витков обмотки W, ток в обмотке  потери в стали
потери в стали  коэффициент мощности цепи coscp и угол потерь
коэффициент мощности цепи coscp и угол потерь  для того, чтобы создать максимальную магнитную индукцию в среднем стержне
для того, чтобы создать максимальную магнитную индукцию в среднем стержне 
Решение
По выражению (19.1) определяется число витков обмотки

где 
 — площадь сечения среднего стержня сердечника;
— площадь сечения среднего стержня сердечника;  — коэффициент заполнения сердечника сталью,
— коэффициент заполнения сердечника сталью, 
Расчет намагничивающего тока  произведен по закону полного тока для половины симметричной магнитной цепи. Сечение всех участков половины магнитной цепи
произведен по закону полного тока для половины симметричной магнитной цепи. Сечение всех участков половины магнитной цепи  одинаковое (рис. 19.9) и определяется по формуле
одинаковое (рис. 19.9) и определяется по формуле

Длина средней линии половины сердечника

Напряженность магнитного поля в магнитопроводе (Приложение 5) для стали Э42 (1512)  так как действующее значение заданной индукции
так как действующее значение заданной индукции  а в Приложении 5 указаны действующие значения магнитной индукции. Напряженность в воздушном зазоре
а в Приложении 5 указаны действующие значения магнитной индукции. Напряженность в воздушном зазоре  будет равна
будет равна

Поправочный коэффициент  для максимальной индукции
для максимальной индукции  определяется из графика (рис. 19.6),
определяется из графика (рис. 19.6),  Тогда намагничивающий ток
Тогда намагничивающий ток  определяется по формуле
определяется по формуле
Масса стали сердечника

где  — плотность стали.
— плотность стали.

где  так как для стали Э42 при толщине листов
так как для стали Э42 при толщине листов  (Приложение 8).
(Приложение 8).
Активная составляющая тока обмотки обусловлена этими потерями, т. е.
Ток в обмотке (рис. 19.7) будет равен

Коэффициент мощности цепи  угол
угол  а угол потерь
а угол потерь 
Феррорезонанс
В цепи с нелинейной индуктивностью (катушка со стальным сердечником) существует нелинейная зависимость напряжения на индуктивности  от тока
от тока  (рис. 19.5в). Следовательно, резонанса напряжений, т. е. равенства напряжений на емкости
(рис. 19.5в). Следовательно, резонанса напряжений, т. е. равенства напряжений на емкости  и индуктивности , можно добиться изменением тока при последовательном соединении конденсатора и нелинейной индуктивности (рис. 19.10а).
и индуктивности , можно добиться изменением тока при последовательном соединении конденсатора и нелинейной индуктивности (рис. 19.10а).
Цепи, содержащие нелинейную индуктивность и линейную емкость, называют феррорезонансными, а явление равенства напряжений  описанное выше, называют феррорезонансом.
описанное выше, называют феррорезонансом.
Для объяснения явления феррорезонанса можно воспользоваться вольт-амперной характеристикой нелинейной индуктивности  линейной емкости
линейной емкости  и линейного активного сопротивления
и линейного активного сопротивления 
При построении суммарной вольт-амперной характеристики 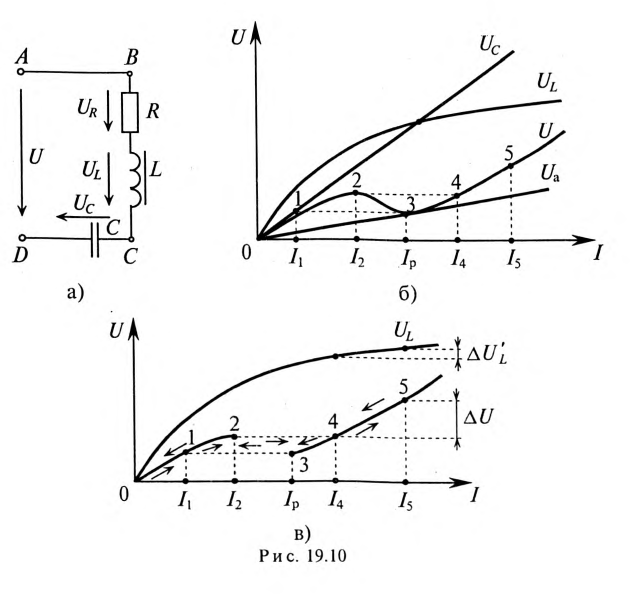
рассматриваемой цепи исходят из того, что напряжение источника U уравновешивается суммой напряжений:

Из векторной диаграммы для рассматриваемой цепи (рис. 12.46) следует, что индуктивное напряжение UL опережает по фазе ток на угол 90°, а емкостное напряжение Uc — отстает на 90 (Для упрощения несинусоидальные величины заменены эквивалентными синусоидальными, т. е. вольт-амперная характеристика нелинейной катушки UL=f(I) аналогична характеристике, показанной на рис. 19.5в.) Следовательно,, реактивные напряжения UL и Uc находятся в противофазе, т. е. Up = UL — Uc.
Величину емкости можно подобрать так, чтобы прямая Uc=f(I) пересекла кривую UL=f(I). Точка их пересечения и является том кой феррорезонанса напряжений (UL = Uc), при котором Up = UL — Uс =0. Следовательно,  (Up — реактивное напряжение цепи).
(Up — реактивное напряжение цепи).
Из графика (рис. 19.106) следует, что с увеличением тока I напряжение U сначала растет (участок 0—2), затем уменьшается (участок 2—3), достигая минимального значения при феррорезонансе (точка 3), затем снова растет (участок 3—5).
Из того же графика видно, что при непрерывном увеличении напряжения источника U ток плавно увеличивается до значения  и скачком увеличивается до
и скачком увеличивается до  , после чего продолжает плав но расти (участок 4—5).
, после чего продолжает плав но расти (участок 4—5).
При плавном уменьшении напряжения U ток  уменьшается до
уменьшается до  и скачком уменьшается до /ь затем плавно падает до нуля (при U= 0).
и скачком уменьшается до /ь затем плавно падает до нуля (при U= 0).
Характерно, что при каждом скачке тока  его фаза по отношению к напряжению Uизменяется на 180°, поэтому это явление называют «опрокидыванием фазы». «Опрокидывание фазы» в феррорезонансной цепи происходит потому, что до значения тока цепь имеет индуктивный характер, т. е. XL > Хс, а после значения тока — емкостной, т.е. XL
его фаза по отношению к напряжению Uизменяется на 180°, поэтому это явление называют «опрокидыванием фазы». «Опрокидывание фазы» в феррорезонансной цепи происходит потому, что до значения тока цепь имеет индуктивный характер, т. е. XL > Хс, а после значения тока — емкостной, т.е. XL
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://urok.1sept.ru/articles/564361
http://www.evkova.org/nelinejnyie-elektricheskie-tsepi