Потенциальное силовое поле


Потенциальное силовое поле
- В общем случае, чтобы рассчитать силу работы для смещения, вам нужно знать закон движения точки на это смещение. Существует класс работы, который не зависит от характера движения точки от рассматриваемого смещения. Эти силы называются потенциалами и важны в различных областях механики и физики. Потенциальное силовое поле и силовая функция Силовое поле является частью пространства, и в каждой точке определенная сила действует на материальную точку и зависит от координат этой точки и времени.
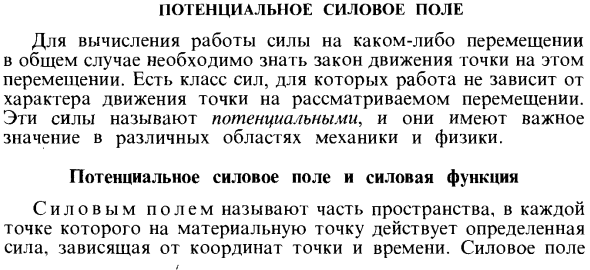
Силовое поле М (х, у, z) Рисунок 72 Res Power Function U Если приложенное усилие не зависит от времени, считайте его стационарным. Если сила зависит от времени, силовое поле нестабильно. Если есть силовая функция U, силовое поле называется потенциальным. Это зависит от точечных и временных координат нестационарного силового поля. Цой проекция силы на координаты Ось для каждой точки в поле (рис. 72) имеет формулу Fx — dUldx–, Ff = dUISy, Fx = dU! определяется дз. (77) Функция U (x, y, z, t) называется силовой функцией. Рассмотрим основные характеристики силовой функции статического силового поля.
Задача о движении точек, притянутых к двум неподвижным центрам с силой, обратно пропорциональной квадрату расстояния, сначала сводится к основанному на Эйлере четырехугольнику для случая плоского движения. Людмила Фирмаль
Из (77) видно, что силовая функция точно определена для постоянной. Это связано с тем, что проекция силы на координатную ось требует только частичного дифференцирования по координатам этой функции, а добавление константы в функцию U не влияет на значения Fx, Fy и Ft. dH = Fdx + Rdy + Fzdz = ^ dx + ^ dy + ^ dz = dl /, ’Bh By Bz Это д / л = д <7. (78) Следовательно, основная работа силы в поле потенциальной силы равна полной производной от функции силы. Это свойство степенной функции может быть использовано для определения. (77) взято из (78).
Полная функция силы F в области от точки Мо до точки М A = J dA = J dU = U (x, Y, z) -U (x0, y0, z0) = U-U0, т. Е. ° A = U-U0, (79) Где U0 = U (x0, y0, z0), U = U (x, y, z) Следовательно, полная работа силы при любом смещении точки равна разнице между значением функции силы в конечной точке и начальной точкой смещения и в форме траектории, которая возникает вместе с уникальной функцией силы. Не зависит. Из (79) значение функции силы в начале и в конце смещения одинаково, если функция силы не принимает никакого другого значения после возврата в исходную точку, поэтому потенциал вдоль замкнутого пути Работа силы в типичном силовом поле равна нулю.
Если область, окруженная закрытой пешеходной дорожкой, содержит специальные специальные точки функции мощности, функция мощности может принимать другие значения после возврата к исходной точке, в зависимости от количества прогулок. Я могу Применение концепции вектора градиента из скалярной функции U Где i, j и Jc — единичные векторы, ориентированные вдоль координатных осей, а сила F может быть выражена как градиент силовой функции V: F = градус U Определяет условия, при которых силовое поле может быть установлено, является ли оно силовым.
Если существует силовая функция U, dFx / dy = d2Uj (dy5х); dFy / dx = d2U / (dxdy). с того времени d2U! (8y dx) = d2 U / (dx dy), тогда dFxldy = dFyjdx или dFJdy — dFyldx = 0. Как хорошо dPr / dy — dFy ldz = 0 \ dFx / dz — 8F2 / 8x — 0 Следовательно, формат полученного условия ^ 5iao; S-Cp.o. (SO) ду дг дх дх ду ду В векторных вычислениях не только необходимо условие (80), но оно оказалось достаточным для существования силовых функций. При использовании вихревого вектора rot / 7 вектора силы F Условие (80) может быть выражено более легко. rotF = 0. (80) Следовательно, необходимо и достаточно, чтобы силовое поле не вращалось для потенциала. Непотенциальные силы — это сопротивление и трение в зависимости от скорости.
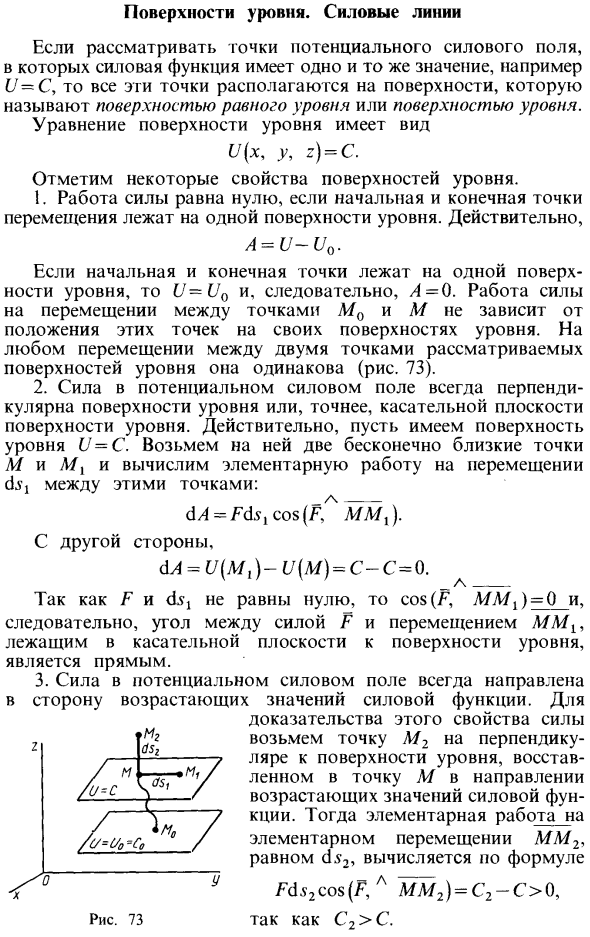
Сила трения постоянна независимо от скорости, но направление силы трения зависит от скорости, поэтому сила сухого трения не является потенциальной. Уровень поверхности. Линия электропередачи Учитывая точки потенциального силового поля, где силовая функция имеет одинаковое значение, например, U — C, все точки зажима находятся на поверхности. Это называется ровной поверхностью или ровной поверхностью. Форма уравнения поверхности уровня U (x, y, z) = C. Обратите внимание на некоторые свойства поверхности уровня. 1.
Если начальная и конечная точки смещения находятся на одной и той же поверхности уровня, работа силы равна нулю. конечно R = £ / -Co. Если начальная и конечная точки находятся на одной поверхности уровня, U = U0 и, следовательно, A = 0. Действие силы на движение между точками L / O и M не зависит от положения точек на их горизонтальной плоскости. Смещение между двумя точками на рассматриваемой горизонтальной плоскости одинаково (рис. 73). 2. Силы поля потенциальной силы всегда перпендикулярны горизонтальной плоскости, точнее касательной плоскости горизонтальной плоскости. На самом деле есть горизонтальная плоскость U = C.
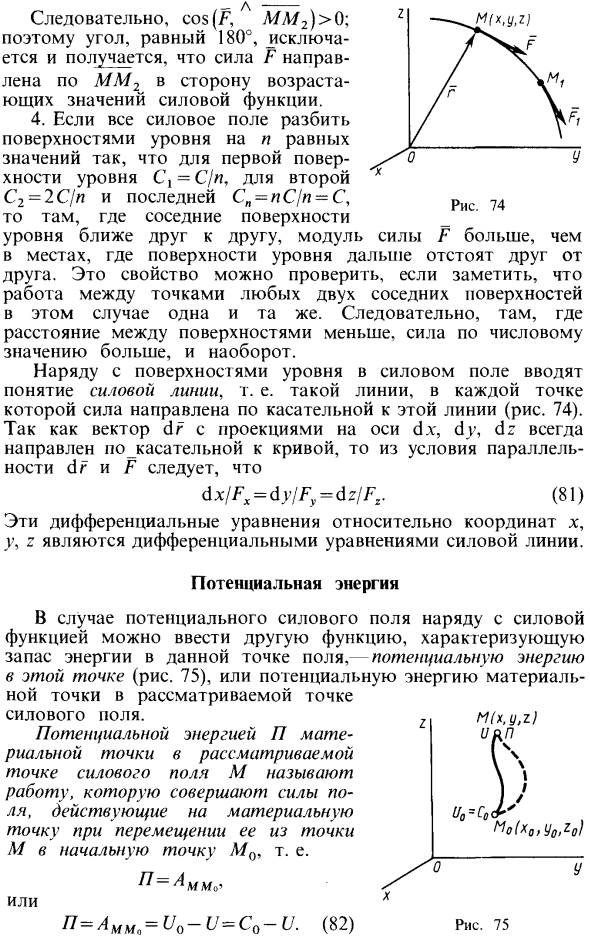
Возьмем две почти бесконечные точки M. и M t и вычислим основную задачу перемещения djj между этими точками. d4 = Fds1cos (F, L / L? 1). С другой стороны, с! Λ = 0. Следовательно, cos (F, MM2)> 0, поэтому мы видим, что угол 180 ° исключен и сила F направлена вдоль MM2 в направлении увеличения значений функции силы. 4. Для первой поверхности с уровнем Ct = C / n, со второй поверхностью C2 = 2С / п и последней С = иС / и = С все силовое поле равно и равно уровню Если разделены, смежные поверхности На уровнях, близких друг к другу, коэффициент силы F равен Место, где горизонтальная плоскость находится дальше.
В этом случае, если вы заметили, что работа между точками на двух смежных поверхностях одинакова, вы можете проверить это свойство. Так где Расстояние между поверхностями будет короче, интенсивность чисел будет больше, и наоборот. Понятие силовых линий вводится вдоль горизонтальной плоскости в силовом поле. То есть линия каждой точки, где сила касается этой линии (рис. 74). Вектор dr, спроецированный на оси dx, dy, dz, всегда направлен вдоль тангенса кривой, поэтому из параллельных условий dr и F: dx / Fx = dylF, = dz / Ft. (81) Эти дифференциальные уравнения для координат x, y, z являются дифференциальными уравнениями для линий магнитного поля.
Наиболее распространенным способом построения уравнений в задаче, в которой определяется закон сил реакции или движения связей, является использование дифференциальных уравнений для плоского движения твердых тел. Людмила Фирмаль
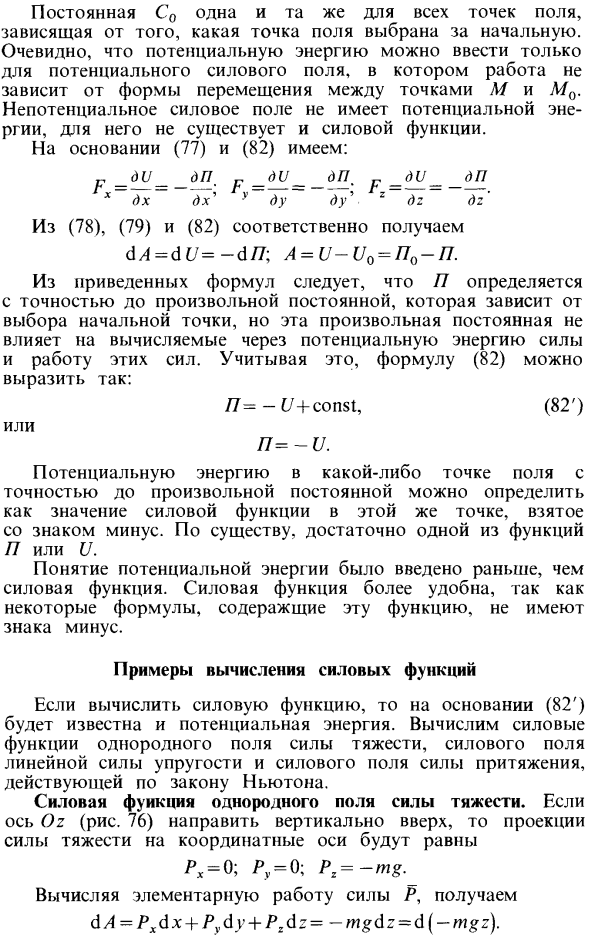
Потенциальная энергия Рисунок 75 Для потенциальных силовых полей, в дополнение к силовой функции, вы можете ввести еще одну функцию, которая характеризует запас энергии в определенной точке поля. Это потенциальная энергия в этой точке (рис. 75) или потенциальная энергия в материальной точке в рассматриваемой точке силового поля. Потенциальная энергия P материальной точки в точке рассматриваемого силового поля M является работой, выполняемой силой поля, действующей на материальную точку при перемещении материальной точки из точки M в начальную точку Mo. P = AMMe или П = Aмм „= и0-и = С0-и. (82).
Константа Co одинакова для всех точек в поле, в зависимости от того, какая точка в поле выбрана в качестве первой точки. Очевидно, что потенциальная энергия может быть введена только для потенциальных силовых полей. В потенциальном поле работа не зависит от формы смещения между точками M и L / o. Непотенциальное силовое поле не имеет потенциальной энергии, поэтому нет силовой функции. На основании (77) и (82) вы можете: п-д. = dJL- p = ^ L = —dJL x dh dh ‘u do du’ z dz dz ‘ Получите поле (83) FORCE FL-FORCE мощность и давление Рис. 76.
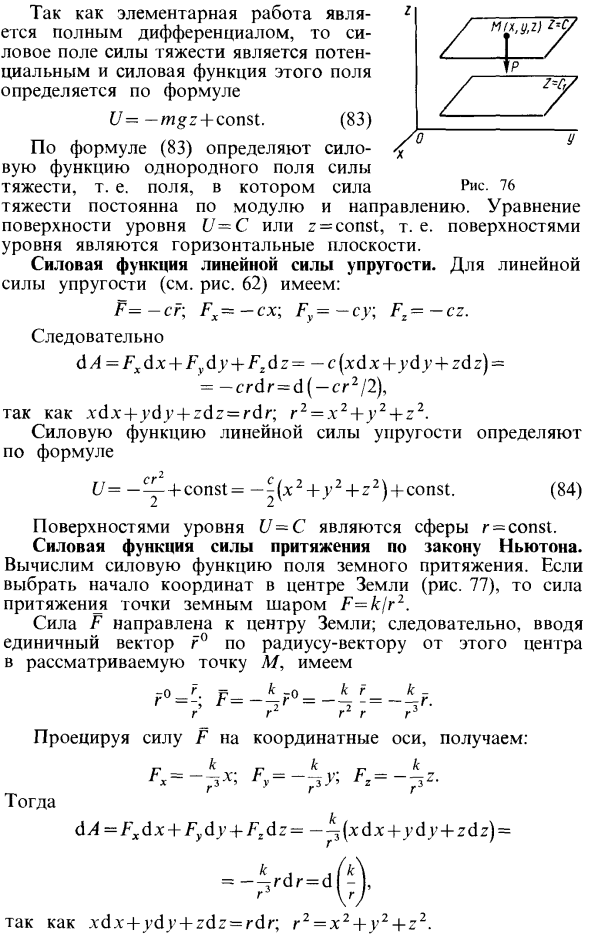
Поскольку элементарная работа является полной производной, заднее гравитационное поле является социальным, а силовая функция определяется по формуле U = -mgz + const. Уравнение (83) определяет новое гравитационное поле, то есть новую функцию поля, где гравитация по модулю и постоянна Горизонтальная плоскость U = C или z = const, то есть горизонтальная плоскость является горизонтальной плоскостью. Степенная функция линейной силы упругости. Для линейной силы упругости (см. Рисунок 62): Fx-cx; F „= -cy; Fx = -cz. так d / l = Fxdx + Fydy + Ftdz = -c (xdx + ydy + zdz) = = -crdr = d (-cr2 / 2), потому что xdx + ydy + zdz = rdr; r2 = x2 + y2 + z2.
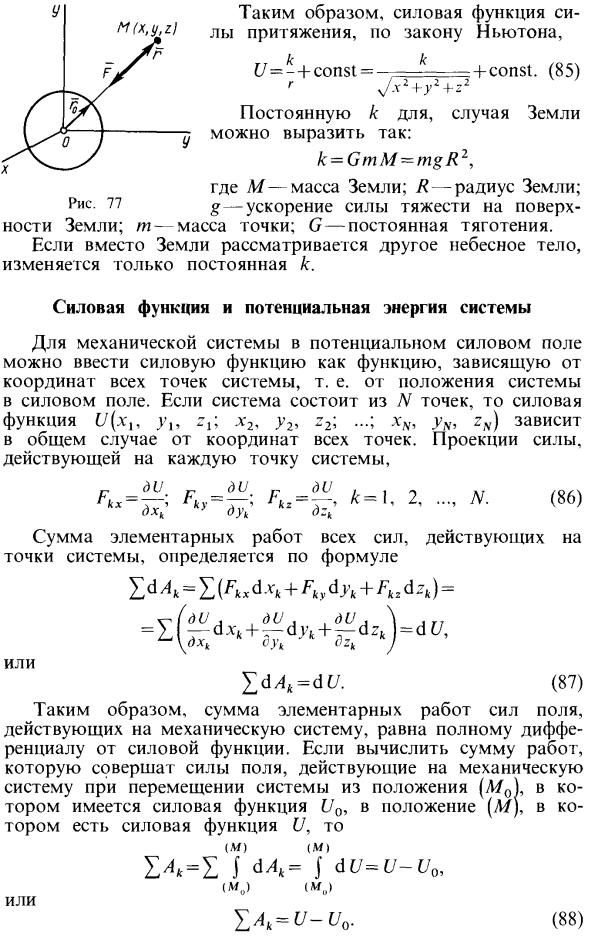
Степенная функция линейной силы упругости определяется выражением U = —const = — ^ (x2 + j2 + z2) + const (84) Поверхность уровня U = C является сферой r = const. Функция силы тяжести в соответствии с законом Ньютона. Вычислить силовую функцию гравитационного поля. Когда источник в центре Земли выбран (Рис. 77), сила притяжения точки F = k / r2 земным шаром. Сила F движется к центру Земли. Поэтому, если мы введем единичный вектор r ° вдоль вектора радиуса от этого центра до рассматриваемой точки M, Когда сила F проецируется на оси координат, она становится следующей. тогда dA = Fxdx + Fydy + Fxdz = -4 (xdx + ydy + zdz) = -> = dG) xdx + ydy + zdz = rdr; ■ + Z2.
Следовательно, согласно закону Ньютона, силовая функция гравитации t / = — + const = —— и конст. (85) ! Я J 2 + Z2 Константа k для земли может быть выражена как: k = ГмМ = мгР2 Где М — масса земли. R — радиус Земли. Рисунок 77 г — Ускорение силы тяжести на поверхности Т земли — это масса точки. G — постоянная гравитации. Рассматривая другое небесное тело вместо земли, меняется только постоянная k. Shea Степенная функция ствола и потенциальная энергия Для механической системы в потенциальном силовом поле вы можете ввести силовую функцию как функцию, зависящую от координат всех точек в системе, то есть положения системы в силовом поле.
Если система состоит из N точек, силовая функция 1 / (x, yt, zt; x2, y2, z2; …; xN, y, zN) обычно зависит от координат всех точек , Проекция сил, действующих на каждую точку системы, 2 … L (86) ДХК ДУК «ЫГ, Сумма основной работы всех сил, действующих на системные точки, определяется по формуле LdA-No. , D.vK + ^ A. (+ /;. D.-, 1) — или YdAk = dU. (87) Таким образом, сумма основных эффектов сил поля, действующих на механическую систему, равна общей разнице от функции силы. Когда система перемещается из положения с силовой функцией Uo (L / O) в положение с силовой функцией U (L /), вычисляя объем работы, выполняемой полевыми силами, действующими на механическую систему, Z-4 * = L T dA = T d.
Следовательно, общая сила поля, действующая на систему при ее перемещении из начальной позиции в другую, равна разнице между значениями функции силы конечной и начальной позиции системы. Потенциальная энергия системы P в позиции рассмотрения (M) поля потенциальной силы — это рабочая сила силы поля, действующая на систему, которую эти силы выполняют, когда система перемещается из позиции рассмотрения в начальную позицию (L /]) Всего. 77 = £ ^ = (/ 1-t / = -C / + const, (89) Где U — значение (L /) функции силы системы сил в положении. Ut — значение функции силы в начальной позиции. Из (86) — (89): дпди дп д. дп т. … = —


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Лекция 9 Потенциальное силовое поле. Определение и свойства потенциального силового поля
 Лекция 9
Лекция 9
Потенциальное силовое поле.
Определение и свойства потенциального силового поля.
Силовым полем называется трехмерное пространство, в каждой точке которого задана функция силы F(r;t). Если время t отсутствует явно, то поле стационарное.
Рассмотрим стационарное силовое поле, заданное в декартовых координатах x, y, z функциями:
Как было показано, для вычисления конечной работы силы силового поля, необходимо знать траекторию точки. Среди силовых полей существует класс потенциальных силовых полей, для которых конечная работа силы определяется только начальным и конечным положением точки и не зависит от траектории.
Силовое поле (38) называется потенциальным, если существует такая функция потенциальной энергии П(x,y,z), что
Пусть задано поле (*). Как проверить, является ли оно потенциальным? Мы считаем, что потенциальная энергия П является непрерывной, дважды дифференцируемой функцией координат. Тогда можно воспользоваться свойством: порядок взятия смешанной производной не влияет на результат :
 ,
,  ,
,  ,
,
Отсюда критерии потенциальности cилового поля

Свойства работы потенциальных сил.
- Элементарная работа потенциальной силы равна минус дифференциалу потенциальной энергии. Действительно
d’A=F•dr=Fxdx+ Fydy+ Fzdz= ̶ (
Отсюда вытекают следующие свойства.
- Конечная работа потенциальной силы зависит только от начального и конечного положения точки
А12= 
- Работа по замкнутому кругу равна нулю:
П1=П2, поэтому Ао=0
Вычисление потенциальной энергии. Закон сохранения полной механической энергии.
Поверхность на которой П сохраняет значение называется эквипотенциальной:
Выясним направление F по отношению к потенциальной поверхности. Пусть точка перемещается по эквипотенциальной поверхности П=С1 . По свойству работы потенциальная сила F не совершает работы:
Поскольку dr направлено произвольно в касательной плоскости к поверхности П = С1, то сила направлена перпендикулярно эквипотенциальным поверхностям.
С другой стороны
F= 
Значит, сила направлена в сторону убывания П.
По свойствам дифференцирования обе функции П(х,у,z) и П(х,у,z) + С, где С- произвольная аддитивная постоянная, определяют одно и тоже силовое поле. Говорят, что потенциальная энергия определена с точностью до постоянной.
Выберем нулевой уровень потенциальной энергии. Переместим точку из произвольного положения М(х,у,z) пространства в любую точку нулевого уровня и сосчитаем работу силы:
Отсюда правило вычисления функций потенциальной энергии:
Функция П(х,у,z) вычисляется как работа потенциальной силы
Направим ось вертикально вверх, тогда
Все поверхности z = const эквипотенциальны. Поэтому
Работа положительна, если точка опускается.
Прямая линейная пружина:
Естественная длина недеформированной пружины l0. При изменении длины на Δ= l —l0 ,называемом деформацией пружины, возникает упругая сила Fв. Она всегда стремится восстановить недеформированное состояние пружины, поэтому она называется восстанавливающей силой.
Пружина линейна, если сила Fв линейно зависит от деформации:
Коэффициент с (н/м) называется жесткостью пружины. Если начало оси х выбрать в положении, где Δ=0, то
A12= — c 
Квадраты координат можно заменить их модулями- деформациями:
A12= 
- Спиральная линейная пружина:
с’
При закручивании пружины на угол φ, называемый деформацией пружины Δ’, возникает упругий восстанавливающий момент Мв. Пружина линейна, если
Коэффициент с’ (нм) называется жесткостью пружины.
A12= — c’
A12= 
Система называется консервативной, если все действующие на неё силы потенциальны.
Теорема об изменении кинетической энергии для консервативной системы в интегральной форме:
Полной механической энергией системы называется сумма её кинетической и потенциальной энергий:
Как видим, полная механическая энергия консервативной системы сохраняется
Предположим, что кроме потенциальных сил, на систему действуют не потенциальные силы, тогда:
Поделив на dt, найдем, что скорость изменения полной механической энергии равна мощности непотенциальных сил.
Например, при наличии силы вязкого сопротивления
полная механическая энергия убывает со скоростью
Статический принцип возможных перемещений для консервативной системы.
Рассмотрим консервативную несвободную систему с потенциальной энергией П (x,y,z), и обобщенными координатами q1. ql. Найдем обобщенные силы системы по определению

Пример: эллиптический маятник
Примем за нулевой уровень потенциальной энергии положение x=0, φ=0 и вычислим работу при возвращении системы в начало координат
П не зависит от х, значит Qx=0
Qφ = — ∂П/∂φ = — m2gl Sin φ
Статический принцип возможных перемещений:
Поскольку обобщенные возможные перемещения δqi независимы, то принцип можно прочитать следующим образом:
В положении равновесия все обобщенные силы обращаются в ноль.
В положении равновесия потенциальная энергия консервативной системы имеет экстремум
Следовательно, нахождение положений равновесия консервативной системы сводится к нахождению экстремумов функции П.
Уравнение Лагранжа для консервативных систем.
Циклические координаты и интегралы.
Рассмотрим консервативную несвободную систему с l степенями свободы. Потенциальная энергия П(q1. ql) определяет обобщенные силы
Уравнения Лагранжа приобретают вид
 (i=1,2. l)
(i=1,2. l)
Здесь учтено, что потенциальная энергия не зависит от обобщенных скоростей

Запишем уравнения Лагранжа через функцию Лагранжа
 (i=1,2. l)
(i=1,2. l)
Координата qσ называется циклической, если от нее не зависит функция Лагранжа
Уравнение Лагранжа с номером σ приобретает вид

и имеет циклический интеграл

Часто этот интеграл описывает случай сохранения количества движения или кинетического момента.
Пример: эллиптический маятник
П и Т не зависят от х, значит х- циклическая координата, и существует интеграл

Мы уже отмечали, что этот интеграл выражает ожидаемое сохранение количества движения системы вдоль оси х.
Потенциальное силовое поле.
Какое силовое поле называется потенциальным?
Стационарное силовое поле называют потенциальным, если существует такая функция, однозначно зависящая от координат точек системы, через которую проекции силы на координатные оси в каждой точке поля выражаются так:
 ,
,  ,
,  .
.
Что называется силовой функцией?
Функцию  , где
, где  называют силовой функцией.
называют силовой функцией.
Как определить элементарную работу сил потенциального поля и работу этих сил на конечном перемещении системы, если известна силовая функция поля?
Если силовое поле является потенциальным, элементарная работа сил в этом поле равна полному дифференциалу силовой функции.
 .
.
Какова работа сил, действующих на точки системы в потенциальном поле, на замкнутом перемещении?
Работа сил, действующих на точки механической системы в потенциальном поле, равна разности значений силовой функции в конечном и начальном положении и не зависит от формы траектории точки
 .
.
Работа сил, действующих на точки механической системы в потенциальном поле на всяком замкнутом перемещении равна нулю, т. к.  .
.
Чему равна потенциальная энергия системы в любом ее положении?
Потенциальная энергия системы в любом данном ее положении равна сумме работ сил потенциального поля, приложенные к ее точкам на перемещении системы из данного положения в нулевое
 .
.
Чему равно изменение потенциальной энергии механической системы при перемещении ее из одного положения в другое?
Изменение потенциальной энергии механической системы при перемещении ее из одного положения в другое равно работе сил, приложенных к точкам системы, на том же перемещении
 .
.
Какая зависимость существует между силовой функцией потенциального поля и потенциальной энергией системы, находящейся в этом поле?
Потенциальная энергия системы  отличается от силовой функции
отличается от силовой функции  , взятой со знаком минус, на постоянную величину
, взятой со знаком минус, на постоянную величину 

 .
.
Как определяются проекции на координатные оси силы, действующей в потенциальном поле на любую точку системы?
Проекции на координатные оси силы, действующей в потенциальном поле на каждую точку системы, равны взятым со знаком минус частным производным от потенциальной энергии системы по соответствующим координатам этой точки
 ,
,  ,
,  .
.
Какие поверхности называются эквипотенциальными и каковы их уравнения?
Геометрическое место точек пространства, в которых потенциальная энергия имеет одно и то же значение называется поверхностью равного потенциала или эквивалентной поверхностью и определяется уравнением
 .
.
Как направлена сила, действующая на материальную точку в потенциальном поле, по отношению к эквипотенциальной поверхности, проходящей через эту точку?
Сила  направлена по нормали к эквипотенциальной поверхности, проходящей через данную точку в сторону уменьшения значений потенциальной энергии.
направлена по нормали к эквипотенциальной поверхности, проходящей через данную точку в сторону уменьшения значений потенциальной энергии.
Чему равна потенциальная энергия материальной точки и механической системы, находящихся под действием сил тяжести?
Потенциальная энергия материальной точки, находящейся под действием силы тяжести, равна
 .
.
Потенциальная энергия механической системы, находящейся под действием силы тяжести, равна произведению веса системы на высоту ее центра масс над нулевой эквипотенциальной поверхностью
 .
.
Какой вид имеют эквипотенциальные поверхности поля силы тяжести и ньютоновой силы тяготения?
Эквипотенциальные поверхности поля силы тяжести представляют собой горизонтальные плоскости. Сила тяжести направлена перпендикулярно этим плоскостям в сторону уменьшения значений потенциальной энергии.
Эквипотенциальные поверхности поля силы притяжения представляют собой сферические поверхности с центром в точке O. Уравнение эквипотенциальных поверхностей имеет вид
 .
.
В чем заключается закон сохранения и превращения механической энергии?
При движении механической системы в стационарном потенциальном поле полная механическая энергия системы при движении остается постоянной.
 .
.
Почему под действием центральной силы материальная точка описывает плоскую кривую?
Если материальная точка движется под действием центральной силы, то момент количества движения точки относительно центра постоянен и точка движется в плоскости перпендикулярной вектору  .
.
Что называют секторной скоростью и как выразить ее модуль в полярных координатах?
Величина  называется секторной скоростью.
называется секторной скоростью.
В чем заключается закон площадей?
При движении точки под действием центральной силы площадь, описывается радиусом — вектором точки, изменяется пропорционально времени
 .
.
Какой вид имеет дифференциальное уравнение в форме Бине, определяющее траекторию точки, движущейся под действием центральной силы?
Уравнение движения точки в форме Бине:  .
.
В случае притяжения, когда  , траектория обращена к полюсу O вогнутостью.
, траектория обращена к полюсу O вогнутостью.
Принцип Даламбера.
В чем заключается сущность принципа Германа — Эйлера — Даламбера для материальной точки?
Геометрическая сумма всех приложенных к точке сил и силы инерции этой точки равны нулю.
 .
.
Каким условиям удовлетворяют в любой момент времени главные векторы внешних задаваемых сил, реакций связей и сил инерции точек несвободной механической системы и главные моменты этих сил относительно любого неподвижного центра?
В любой момент времени геометрическая сумма главных векторов задаваемых сил, реакций связей и сил инерции точек системы равны нулю.
В любой момент времени для всякой несвободной механической системы геометрическая сумма главных моментов задаваемых сил, реакций связей и сил инерции относительно любого неподвижного центра равна нулю.
Каковы модуль и направление главного вектора сил инерции механической системы?
Главный вектор сил инерции равен:
 .
.
Модуль главного вектора сил инерции
 .
.
К чему приводятся силы инерции точек твердого тела:
а) при поступательном движении тела;
при поступательном движении силы инерции приводятся к равнодействующей силе, приложенной в центре масс тела, равной по модулю произведению массы тела на модуль ускорения его центра масс и направлены противоположно этому ускорению;
б) при вращении тела, имеющего плоскость материальной симметрии, вокруг неподвижной оси, перпендикулярной этой плоскости;
при вращении твердого тела, имеющего плоскость материальной симметрии, вокруг оси перпендикулярной этой плоскости, силы инерции приводятся к равнодействующей силе, лежащей в плоскости симметрии. Модуль и направление этой силы равны главному вектору сил инерции, а расстояние от ее линии действия до точки пересечения оси вращения с плоскостью симметрии равно

в) при плоском движении тела, имеющего плоскость материальной симметрии?
Если твердое тело, имеющее плоскость материальной симметрии, движется параллельно этой плоскости, то силы инерции приводятся к силе, приложенной в центре масс и равной главному вектору сил инерции , и к паре сил, лежащей в плоскости симметрии, числовое значение момента которой определяется формулой:
 .
.
При каких условиях динамические давления вращающегося тела на опоры равны нулю?
Динамические составляющие реакций подшипников равны нулю в том случае, если ось вращения тела является главной центральной осью инерции тела.
http://fiz.na5bal.ru/doc/7501/index.html
http://lektsii.org/15-60570.html