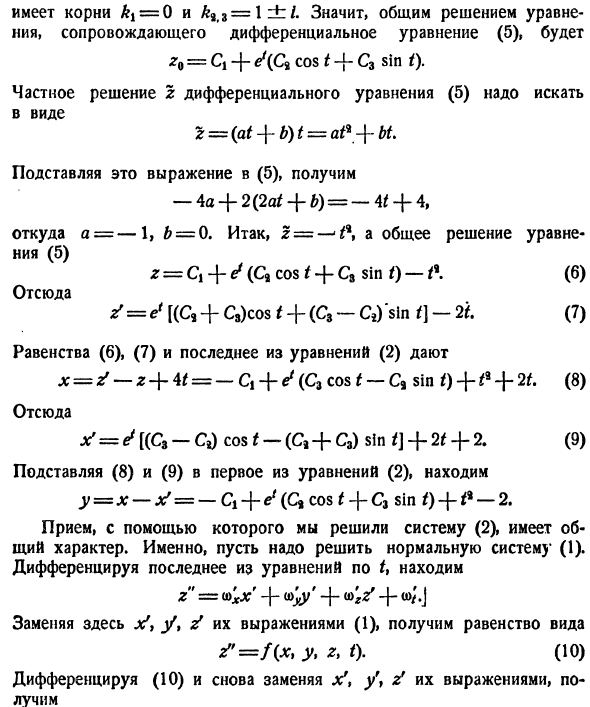
Символьное решение линейных дифференциальных уравнений и систем методом преобразований Лапласа c применением SymPy
Реализация алгоритмов на языке Python с использованием символьных вычислений очень удобна при решении задач математического моделирования объектов, заданных дифференциальными уравнениями. Для решения таких уравнений широко используются преобразования Лапласа, которые, говоря упрощенно, позволяют свести задачу к решению простейших алгебраических уравнений.
В данной публикации предлагаю рассмотреть функции прямого и обратного преобразования Лапласа из библиотеки SymPy, которые позволяют использовать метод Лапласа для решения дифференциальных уравнений и систем средствами Python.
Сам метод Лапласа и его преимущества при решении линейных дифференциальных уравнений и систем широко освещены в литературе, например в популярном издании [1]. В книге метод Лапласа приведен для реализации в лицензионных программных пакетах Mathematica, Maple и MATLAB (что подразумевает приобретение учебным заведением этого ПО) на выбранных автором отдельных примерах.
Попробуем сегодня рассмотреть не отдельный пример решения учебной задачи средствами Python, а общий метод решения линейных дифференциальных уравнений и систем с использованием функций прямого и обратного преобразования Лапласа. При этом сохраним обучающий момент: левая часть линейного дифференциального уравнения с условиями Коши будет формироваться самим студентом, а рутинная часть задачи, состоящая в прямом преобразовании Лапласа правой части уравнения, будет выполняться при помощи функции laplace_transform().
История об авторстве преобразований Лапласа
Преобразования Лапласа (изображения по Лапласу) имеют интересную историю. Впервые интеграл в определении преобразования Лапласа появился в одной из работ Л. Эйлера. Однако в математике общепринято называть методику или теорему именем того математика, который открыл ее после Эйлера. В противном случае существовало бы несколько сотен различных теорем Эйлера.
В данном случае следующим после Эйлера был французский математик Пьер Симон де Лаплас (Pierre Simon de Laplace (1749-1827)). Именно он использовал такие интегралы в своей работе по теории вероятностей. Самим Лапласом не применялись так называемые «операционные методы» для нахождения решений дифференциальных уравнений, основанные на преобразованиях Лапласа (изображениях по Лапласу). Эти методы в действительности были обнаружены и популяризировались инженерами-практиками, особенно английским инженером-электриком Оливером Хевисайдом (1850-1925). Задолго до того, как была строго доказана справедливость этих методов, операционное исчисление успешно и широко применялось, хотя его законность ставилось в значительной мере под сомнение даже в начале XX столетия, и по этой теме велись весьма ожесточенные дебаты.
Функции прямого и обратного преобразования Лапласа

Эта функция возвращает (F, a, cond), где F(s) есть преобразование Лапласа функции f(t), a Текст программы
Время на обратное визуальное преобразование Лапласа: 2.68 s

Обратное преобразование Лапласа часто используется при синтезе САУ, где Python может заменить дорогостоящих программных “монстров” типа MathCAD, поэтому приведенное использование обратного преобразования имеет практическое значение.
Преобразование Лапласа от производных высших порядков для решения задачи Коши

Если a и b — константы, то

для всех s, таких, что существуют оба преобразования Лапласа (изображения по Лапласу) функций f(t) и q(t).
Проверим линейность прямого и обратного преобразований Лапласа с помощью ранее рассмотренных функций laplace_transform() и inverse_laplace_transform(). Для этого в качестве примера примем f(t)=sin(3t), q(t)=cos(7t), a=5, b=7 и используем следующую программу.
(7*s**3 + 15*s**2 + 63*s + 735)/((s**2 + 9)*(s**2 + 49))
(7*s**3 + 15*s**2 + 63*s + 735)/((s**2 + 9)*(s**2 + 49))
True
5*sin(3*t) + 7*cos(7*t)
5*sin(3*t) + 7*cos(7*t)
Приведенный код также демонстрирует однозначность обратного преобразования Лапласа.
Если предположить, что  удовлетворяет условиям первой теоремы, то из этой теоремы будет следовать, что:
удовлетворяет условиям первой теоремы, то из этой теоремы будет следовать, что:


Повторение этого вычисления дает

После конечного числа таких шагов мы получаем следующее обобщение первой теоремы:


Применяя соотношение (3), содержащее преобразованные по Лапласу производные искомой функции с начальными условиями, к уравнению (1), можно получить его решение по методу, специально разработанному на нашей кафедре при активной поддержке Scorobey для библиотеки SymPy.
Метод решения линейных дифференциальных уравнений и систем уравнений, основанный на преобразованиях Лапласа, с использованием библиотеки SymPy

где  — приведенное начальное положение массы,
— приведенное начальное положение массы,  — приведенная начальная скорость массы.
— приведенная начальная скорость массы.
Упрощённая физическая модель, заданная уравнением (4) при ненулевых начальных условиях [1]:

Система, состоящая из материальной точки заданной массы, закрепленной на пружине, удовлетворяет задаче Коши (задаче с начальными условиями). Материальная точка заданной массы первоначально находится в покое в положении ее равновесия.
Для решения этого и других линейных дифференциальных уравнений методом преобразований Лапласа удобно пользоваться следующей системой, полученной из соотношений (3): 




Последовательность решения средствами SymPy следующая:
- загружаем необходимые модули и явно определяем символьные переменные:
указываем версию библиотеки sympy, чтобы учесть ее особенности. Для этого нужно ввести такие строки:
по физическому смыслу задачи переменная времени определяется для области, включающей ноль и положительные числа. Задаём начальные условия и функцию в правой части уравнения (4) с её последующим преобразование по Лапласу. Для начальных условий необходимо использовать функцию Rational, поскольку использование десятичного округления приводит к ошибке.
пользуясь (5), переписываем преобразованные по Лапласу производные, входящие в левую часть уравнения (4), формируя из них левую часть этого уравнения, и сравниваем результат с правой его частью:
решаем полученное алгебраическое уравнение относительно преобразования X(s) и выполняем обратное преобразование Лапласа:
осуществляем переход из работы в библиотеке SymPyв библиотеку NumPy:
строим график обычным для Python методом:
Получаем:
Версия библиотеки sympy – 1.3
Получен график периодической функции, дающей положение материальной точки заданной массы. Метод преобразования Лапласа с использованием библиотеки SymPy дает решение не только без потребности сначала найти общее решение однородного уравнения и частное решение первоначального неоднородного дифференциального уравнения, но и без потребности использования метода элементарных дробей и таблиц Лапласа.
При этом учебное значение метода решения сохраняется за счёт необходимости использования системы (5) и перехода в NumPy для исследования решения более производительными методами.
Для дальнейшей демонстрации метода решим систему дифференциальных уравнений: 
с начальными условиями 
Упрощённая физическая модель, заданная системой уравнений (6) при нулевых начальных условиях:
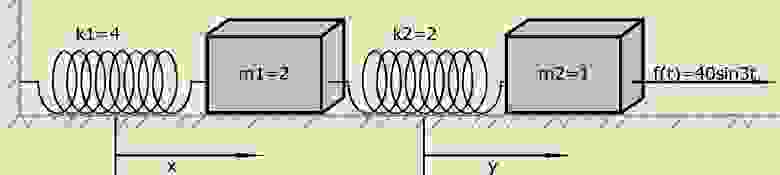
Таким образом, сила f(t) внезапно прилагается ко второй материальной точке заданной массы в момент времени t = 0, когда система находится в покое в ее положении равновесия.
Решение системы уравнений идентично ранее рассмотренному решению дифференциального уравнения (4), поэтому привожу текст программы без пояснений.
Для ненулевых начальных условий текст программы и график функций примет вид:
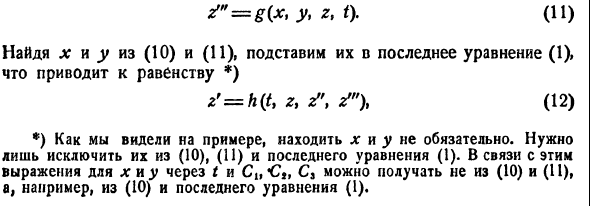
Рассмотрим решение линейного дифференциального уравнения четвёртого порядка с нулевыми начальными условиями: 

Решим линейное дифференциальное уравнение четвёртого порядка: 
с начальными условиями  ,
,  ,
,  .
.
Функции для решения ОДУ
Для имеющих аналитическое решение ОДУ и систем ОДУ применяется функция dsolve():
sympy.solvers.ode.dsolve(eq, func=None, hint=’default’, simplify=True, ics=None, xi=None, eta=None, x0=0, n=6, **kwargs)
Давайте сравним производительность функции dsolve() с методом Лапласа. Для примера возьмём следующее дифференциальное уравнение четвёртой степени с нулевыми начальными условиями: 

Время решения уравнения с использованием функции dsolve(): 1.437 s
Время решения уравнения с использованием преобразования Лапласа: 3.274 s
Итак, функция dsolve() (1.437 s) решает уравнение четвёртого порядка быстрее, чем выполняется решение по методу преобразований Лапласа (3.274 s) более чем в два раза. Однако при этом следует отметить, что функция dsolve() не решает системы дифференциальных уравнений второго порядка, например, при решении системы (6) с использованием функция dsolve() возникает ошибка:
Данная ошибка означает, что решение системы дифференциальных уравнений с помощью функции dsolve() не может быть представлено символьно. Тогда как при помощи преобразований Лапласа мы получили символьное представление решения, и это доказывает эффективность предложенного метода.
Для того чтобы найти необходимый метод решения дифференциальных уравнений с помощью функции dsolve(), нужно использовать classify_ode(eq, f(x)), например:
Eq(f(x), C1*sin(x) + C2*cos(x))
(‘nth_linear_constant_coeff_homogeneous’, ‘2nd_power_series_ordinary’)
(‘separable’, ‘1st_exact’, ‘almost_linear’, ‘1st_power_series’, ‘lie_group’, ‘separable_Integral’, ‘1st_exact_Integral’, ‘almost_linear_Integral’)
[Eq(f(x), -acos((C1 + Integral(0, x))*exp(-Integral(-tan(x), x))) + 2*pi), Eq(f(x), acos((C1 + Integral(0,x))*exp(-Integral(-tan(x), x))))]
Таким образом, для уравнения eq=Eq(f(x).diff(x,x)+f(x),0) работает любой метод из первого списка:
Для уравнения eq = sin(x)*cos(f(x)) + cos(x)*sin(f(x))*f(x).diff(x) работает любой метод из второго списка:
separable, 1st_exact, almost_linear,
1st_power_series, lie_group, separable_Integral,
1st_exact_Integral, almost_linear_Integral
Чтобы использовать выбранный метод, запись функции dsolve() примет вид, к примеру:
Вывод:
Данная статья ставила своей целью показать, как использовать средства библиотек SciPy и NumPy на примере решения систем линейных ОДУ операторным методом. Таким образом, были рассмотрены методы символьного решения линейных дифференциальных уравнений и систем уравнений методом Лапласа. Проведен анализ производительности этого метода и методов, реализованных в функции dsolve().
- Дифференциальные уравнения и краевые задачи: моделирование и вычисление с помощью Mathematica, Maple и MATLAB. 3-е издание.: Пер. с англ. — М.: ООО «И.Д. Вильяме», 2008. — 1104 с.: ил. — Парал. тит. англ.
- Использование обратного преобразования Лапласа для анализа динамических звеньев систем управления
Системы дифференциальных уравнений с примерами решения и образцами выполнения
Также как и обыкновенные дифференциальные уравнения, системы дифференциальных уравнений применяются для описания многих процессов реальной действительности. В частности, к ним относятся различного рода физические и химические процессы, процессы нефте- и газодобычи, геологии, экономики и т.д. Действительно, если некоторые физические величины (перемещение тела, пластовое давление жидкости в фиксированной точке с тремя координатами, концентрация веществ, объемы продаж продуктов) оказываются меняющимися со временем под воздействием тех или иных факторов, то, как правило, закон их изменения по времени описывается именно системой дифференциальных уравнений, т.е. системой, связывающей исходные переменные как функции времени и производные этих функций. Независимой переменной в системе дифференциальных уравнений может выступать не только время, но и другие физические величины: координата, цена продукта и т.д.

Решение систем дифференциальных уравнений
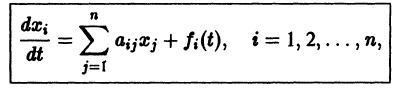
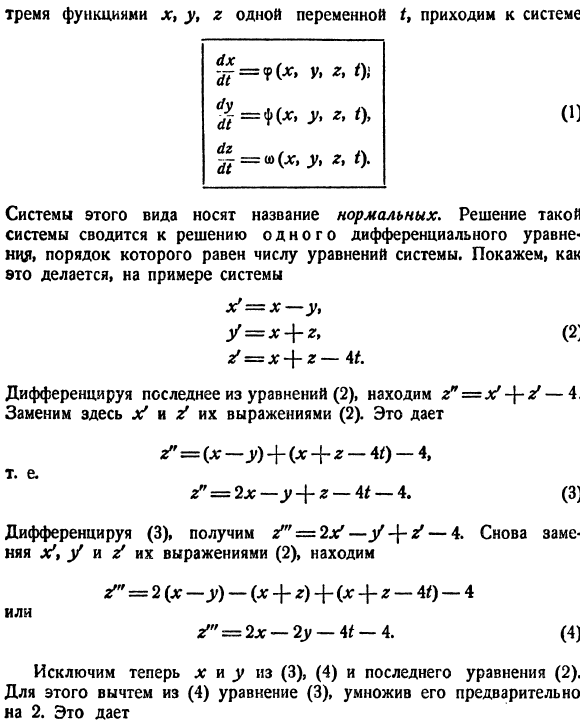
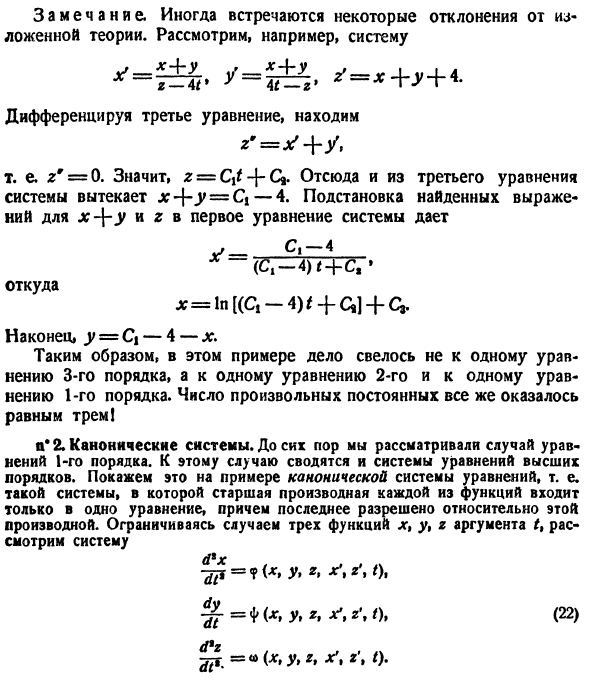
К системе дифференциальных уравнений приводит уже простейшая задача динамики точки: даны силы, действующие на материальную точку; найти закон движения, т. е. найти функции  выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
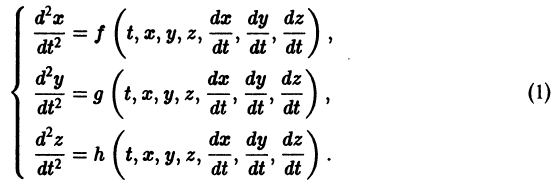
Здесь x, у, z — координаты движущейся точки, t — время, f, g, h — известные функции своих аргументов.
Система вида (1) называется канонической. Обращаясь к общему случаю системы т дифференциальных уравнений с т неизвестными функциями  аргумента t, назовем канонической систему вида
аргумента t, назовем канонической систему вида

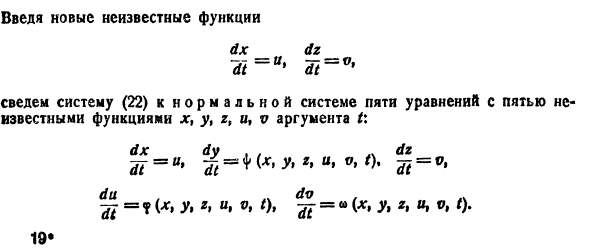
разрешенную относительно старших производных. Система уравнений первого порядка, разрешенных относительно производных от искомых функций,

Если  в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из
в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из  уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
Например, одно уравнение
является мастным случаем канонической системы. Положив  в силу исходного уравнения будем иметь
в силу исходного уравнения будем иметь

В результате получаем нормальную систему уравнений

эквивалентную исходному уравнению.
Определение:
Решением нормальной системы (3) на интервале (а, Ь) изменения аргумента t называется всякая система n функций

дифференцируемых на интервале а 
Теорема:
Существования и единственности решения задачи Коши. Пусть имеем нормальную систему дифференциальных уравнений

и пусть функции  определены в некоторой (n + 1) — мерной области D изменения переменных
определены в некоторой (n + 1) — мерной области D изменения переменных  Если существует окрестность
Если существует окрестность  точки
точки  в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным
в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным  то найдется интервал
то найдется интервал  изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям
изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям

Определение:
Система n функций

зависящих от t и n произвольных постоянных  называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
1) при любых допустимых значениях система функций (6) обращает уравнения (3) в тождества,
2) в области функции (6) решают любую задачу Коши.
Решения, получающиеся из общего при конкретных значениях постоянных называются частными решениями.
Обратимся для наглядности к нормальной системе двух уравнений,
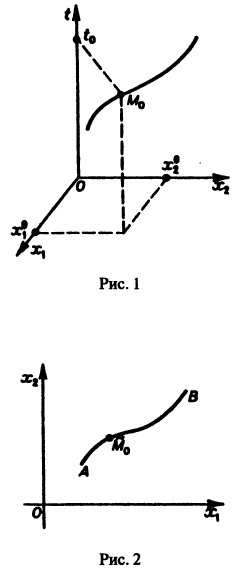
Будем рассматривать систему значений t, x1, х2 как прямоугольные декартовы координаты точки трехмерного пространства, отнесенного к системе координат  Решение
Решение
системы (7), принимающее при  значения
значения  определяет в пространстве некоторую линию, проходящую через точку
определяет в пространстве некоторую линию, проходящую через точку  Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Нормальной системе (7) и ее решению можно придать еще такое истолкование: будем независимую переменную t рассматривать как параметр, а решение
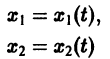
системы — как параметрические уравнения кривой на плоскости  Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение
Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение  системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку
системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку  (рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
(рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
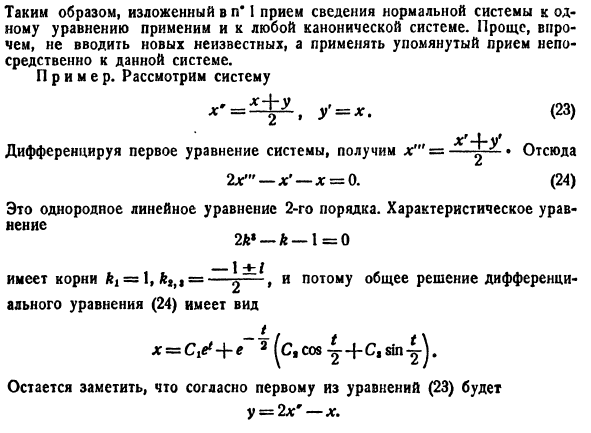
Методы интегрирования систем дифференциальных уравнений
Метод исключения
Один из методов интегрирования — метод исключения. Частным случаем канонической системы является одно уравнение n-го порядка, разрешенное относительно старшей производной
Введя новые функции  заменим это уравнение следующей нормальной системой n уравнений:
заменим это уравнение следующей нормальной системой n уравнений:
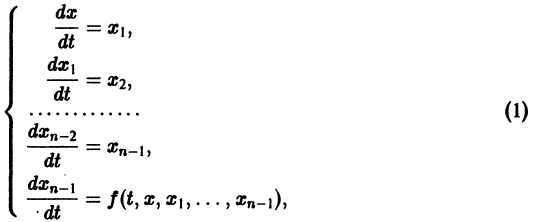
т. е. одно уравнение n-го порядка эквивалентно нормальной системе (1)
Можно утверждать и обратное, что, вообще говоря, нормальная система п уравнений первого порядка эквивалентна одному уравнению порядка n. На этом и основан метод исключения для интегрирования систем дифференциальных уравнений.
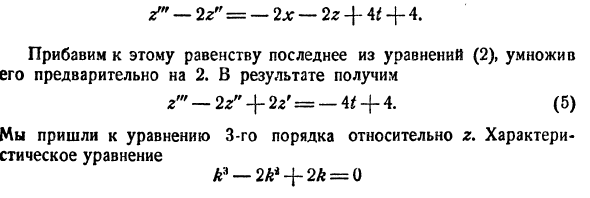
Делается это так. Пусть имеем нормальную систему
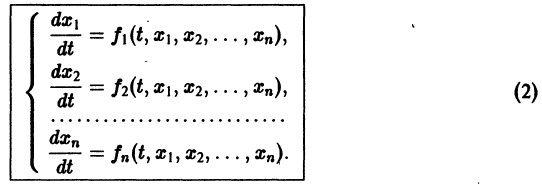
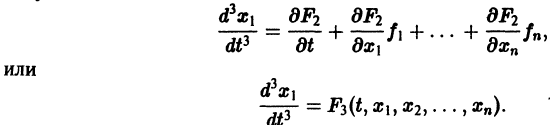
Продифференцируем первое из уравнений (2) по t. Имеем

Заменяя в правой части производные  их выражениями
их выражениями  получим
получим

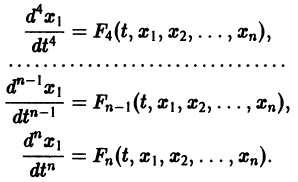
Уравнение (3) снова дифференцируем по t. Принимая во внимание систему (2), получим
Продолжая этот процесс, найдем
Предположим, что определитель
(якобиан системы функций  отличен от нуля при рассматриваемых значениях
отличен от нуля при рассматриваемых значениях 

Тогда система уравнений, составленная из первого уравнения системы (2) и уравнений
будет разрешима относительно неизвестных  При этом выразятся через
При этом выразятся через 
Внося найденные выражения в уравнение
получим одно уравнение n-го порядка

Из самого способа его построения следует, что если  есть решения системы (2), то функция х1(t) будет решением уравнения (5).
есть решения системы (2), то функция х1(t) будет решением уравнения (5).
Обратно, пусть Х1(t) — решение уравнения (5). Дифференцируя это решение по t, вычислим  и подставим найденные значения как известные функции
и подставим найденные значения как известные функции
от t в систему уравнений
По предположению эту систему можно разрешить относительно т. е найти как функции от t.
Можно показать, что так построенная система функций

составляет решение системы дифференциальных уравнений (2). Пример:
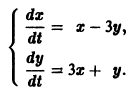
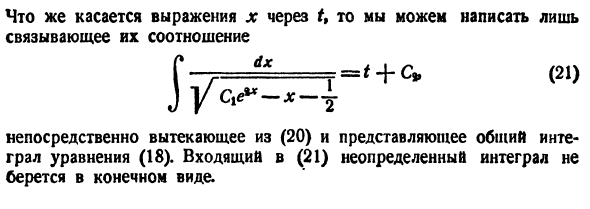
Требуется проинтегрировать систему

Дифференцируя первое уравнение системы, имеем

откуда, используя второе уравнение, получаем

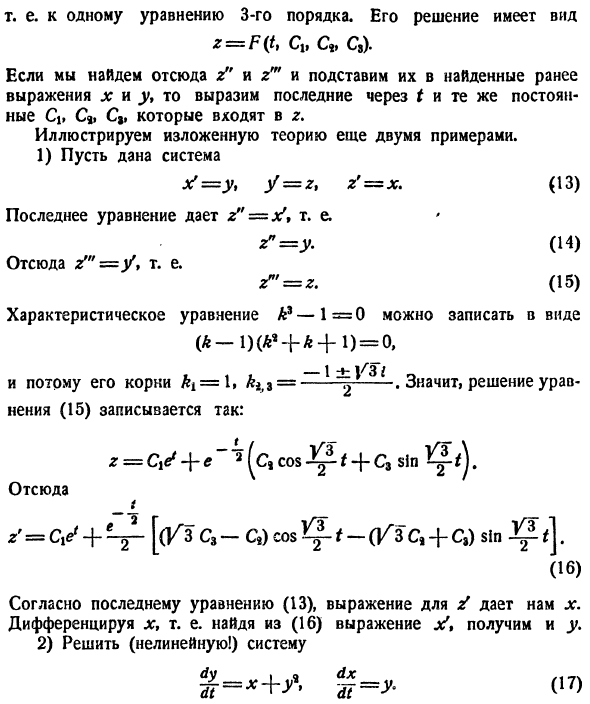
— линейное дифференциальное уравнение второго порядка с постоянными коэффициентами с одной неизвестной функцией. Его общее решение имеет вид

В силу первого уравнения системы находим функцию

Найденные функции x(t), y(t), как легко проверить, при любых значениях С1 и С2 удовлетворяют заданной системе.
Функции x(t), y(t) можно представить в виде

откуда видно, что интегральные кривые системы (6) — винтовые линии с шагом  и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
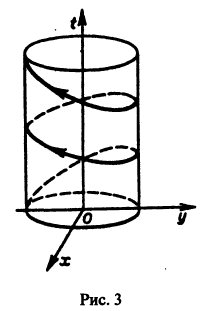
Исключая в формулах (7) параметр t, получаем уравнение
так что фазовые траектории данной системы суть окружности с центром в начале координат — проекции винтовых линий на плоскость хОу.
При А = 0 фазовая траектория состоит из одной точки х = 0, у = 0, называемой точкой покоя системы.
Замечание:
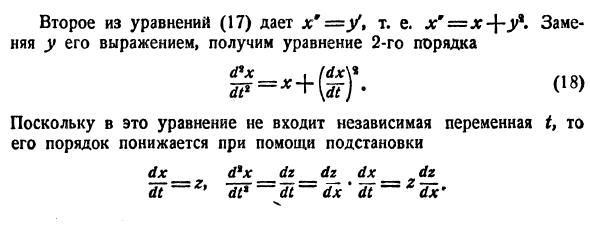
Может оказаться, что функции нельзя выразить через  Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
нельзя заменить эквивалентным уравнением второго порядка относительно х1 или x2. Эта система составлена из пары уравнений 1-го порядка, каждое из которых интегрируется независимо, что дает

Метод интегрируемых комбинаций
Интегрирование нормальных систем дифференциальных уравнений

иногда осуществляется методом интегрируемых комбинаций.
Интегрируемой комбинацией называется дифференциальное уравнение, являющееся следствием уравнений (8), но уже легко интегрирующееся.
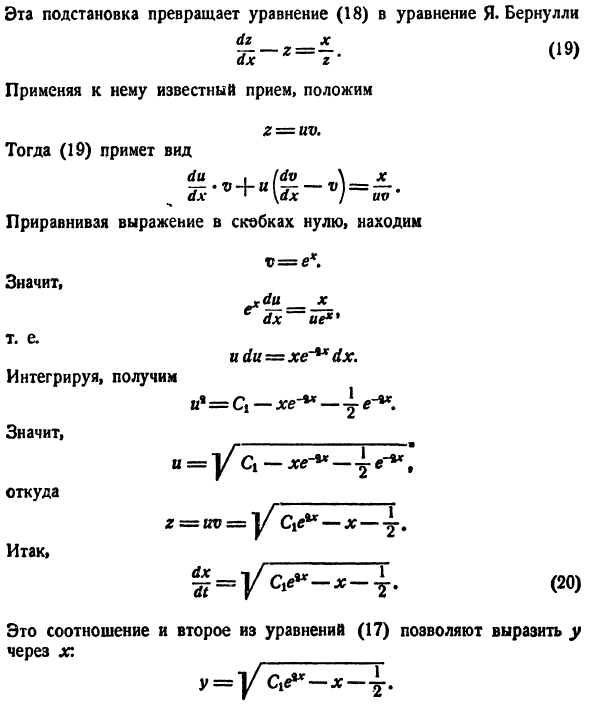
Пример:
Складывая почленно данные уравнения, находим одну интегрируемую комбинацию:

Вычитая почленно из первого уравнения системы второе, получаем вторую интегрируемую комбинацию:

Мы нашли два конечных уравнения

из которых легко определяется общее решение системы:

Одна интегрируемая комбинация дает возможность получить одно уравнение

связывающее независимую переменную t и неизвестные функции Такое конечное уравнение называется первым интегралом системы (8). Иначе: первым интегралом системы дифференциальных уравнений (8) называется дифференцируемая функция  не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
Если найдено п первых интегралов системы (8) и все они независимы, т. е. якобиан системы функций  отличен от нуля:
отличен от нуля:
то задача интефирования системы (8) решена (так как из системы
определяются все неизвестные функции 
Системы линейных дифференциальных уравнений
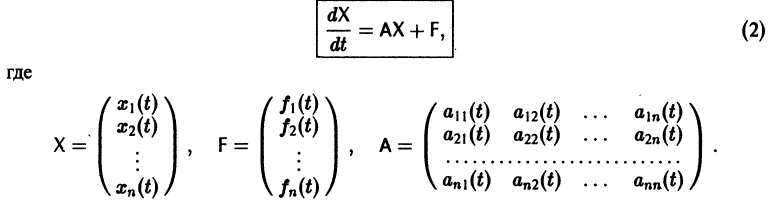
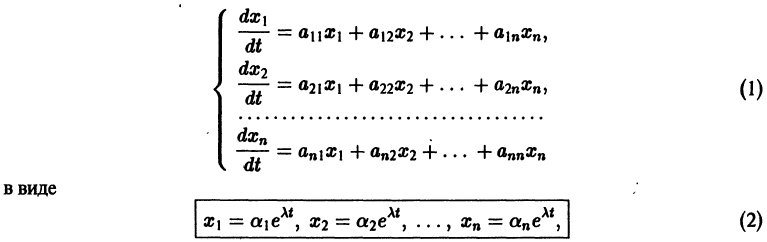
Система дифференциальных уравнений называется линейной, если она линейна относительно неизвестных функций и их производных, входящих в уравнение. Система n линейных уравнений первого порядка, записанная в нормальной форме, имеет вид

или, в матричной форме,
Теорема:
Если все функции  непрерывны на отрезке
непрерывны на отрезке  то в достаточно малой окрестности каждой точки
то в достаточно малой окрестности каждой точки  где
где  выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
Действительно, в таком случае правые части системы (1) непрерывны по совокупности аргументов t, и их частные производные по  ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам
ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам 
Введем линейный оператор
Тогда система (2) запишется в виде

Если матрица F — нулевая, т. е.  на интервале (а,b), то система (2) называется линейной однородной и имеет вид
на интервале (а,b), то система (2) называется линейной однородной и имеет вид

Приведем некоторые теоремы, устанавливающие свойства решений линейных систем.
Теорема:
Если X(t) является решением линейной однородной системы

то cX(t), где с — произвольная постоянная, является решением той же системы.
Теорема:
двух решений  однородной линейной системы уравнений является решением той же системы.
однородной линейной системы уравнений является решением той же системы.
Следствие:
с произвольными постоянными коэффициентами сi решений  линейной однородной системы дифференциальных уравнений
линейной однородной системы дифференциальных уравнений
является решением той же системы.
Теорема:
Если  есть решение линейной неоднородной системы
есть решение линейной неоднородной системы

a Xo(t) — решение соответствующей однородной системы

будет решением неоднородной системы 
Действительно, по условию,

Пользуясь свойством аддитивности оператора  получаем
получаем

Это означает, что сумма  есть решение неоднородной системы уравнений
есть решение неоднородной системы уравнений
Определение:
называются линейно зависимыми на интервале a 
при  причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при
причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при  то векторы
то векторы 
 называются линейно независимыми на (а, b).
называются линейно независимыми на (а, b).
Заметим, что одно векторное тождество (5) эквивалентно n тождествам:

называется определителем Вронского системы векторов 
Определение:
Пусть имеем линейную однородную систему

где  матрица с элементами
матрица с элементами  Система n решений
Система n решений

линейной однородной системы (6), линейно независимых на интервале а 
с непрерывными на отрезке  коэффициентами
коэффициентами  является линейная комбинация п линейно независимых на интервале а
является линейная комбинация п линейно независимых на интервале а 
( ) — произвольные постоянные числа).
) — произвольные постоянные числа).
Пример:
имеет, как нетрудно проверить, решения

Эти решения линейно независимы, так как определитель Вронского отличен от нуля:

Общее решение системы имеет вид

(с1, с2 — произвольные постоянные).
Фундаментальная матрица
Квадратная матрица
столбцами которой являются линейно независимые решения  системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
Если Х(t) — фундаментальная матрица системы (6), то общее решение системы можно представить в виде
— постоянная матрица-столбец с произвольными элементами. Полагая в (7) t = t0, имеем

Матрица  называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
Теорема:
О структуре общего решения линейной неоднородной системы дифференциальных уравнений. Общее решение в области  линейной неоднородной системы дифференциальных уравнений
линейной неоднородной системы дифференциальных уравнений

с непрерывными на отрезке коэффициентами aij(t) и правыми частями fi(t) равно сумме общего решения
соответствующей однородной системы и какого-нибудь частного решения  неоднородной системы (2):
неоднородной системы (2):

Метод вариации постоянных
Если известно общее решение линейной однородной системы (6), то частное решение неоднородной системы можно находить методом вариации постоянных (метод Лагранжа).
есть общее решение однородной системы (6), тогда

причем решения Xk(t) линейно независимы.
Будем искать частное решение неоднородной системы

где  неизвестные функции от t. Дифференцируя по t, имеем
неизвестные функции от t. Дифференцируя по t, имеем
Подставляя  в (2), получаем
в (2), получаем

то для определения  получаем систему
получаем систему
или, в развернутом виде,

Система (10) есть линейная алгебраическая система относительно определителем которой является определитель Вронского W(t) фундаментальной системы решений . Этот определитель отличен от нуля всюду на интервале a 
где  — известные непрерывные функции. Интегрируя последние соотношения, находим
— известные непрерывные функции. Интегрируя последние соотношения, находим

Подставляя эти значения  в (9), находим частное решение системы (2)
в (9), находим частное решение системы (2)
(здесь под символом  понимается одна из первообразных для функции
понимается одна из первообразных для функции 
Системы линейных дифференциальных уравнений с постоянными коэффициентами
Рассмотрим линейную систему дифференциальных уравнений
в которой все коэффициенты  — постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
— постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
Мы рассмотрим еще метод Эйлера интегрирования линейных однородных систем дифференциальных уравнений с постоянными коэффициентами. Он состоит в следующем.
Метод Эйлера
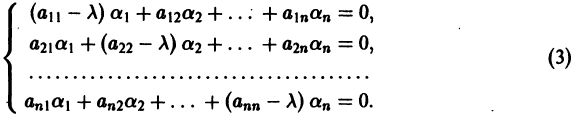
Будем искать решение системы
где  — постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на
— постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на  и перенося все члены в одну часть равенства, получаем систему
и перенося все члены в одну часть равенства, получаем систему
Для того, чтобы эта система (3) линейных однородных алгебраических уравнений с n неизвестными  имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
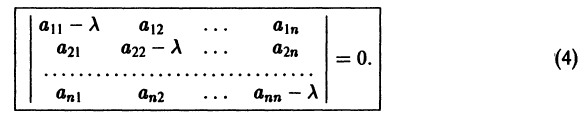
Уравнение (4) называется характеристическим. В его левой части стоит многочлен относительно  степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни
степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни  характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения
характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения  этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде
этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде

где второй индекс указывает номер решения, а первый — номер неизвестной функции. Построенные таким образом п частных решений линейной однородной системы (1)

образуют, как можно проверить, фундаментальную систему решений этой системы.
Следовательно, общее решение однородной системы дифференциальных уравнений (1) имеет вид
где  произвольные постоянные.
произвольные постоянные.
Случай, когда характеристическое уравнение имеет кратные корни, мы рассматривать не будем.
Пример:
Ищем решение в виде


имеет корни 
Система (3) для определения a1, а2 выглядит так:

Подставляя в (*)  получаем
получаем
откуда а21 = а11. Следовательно,

Полагая в  находим a22 = — a12, поэтому
находим a22 = — a12, поэтому

Общее решение данной системы:
Матричный метод
Изложим еще матричный метод интегрирования однородной системы (1). Запишем систему (1) в виде

 матрица с постоянными действительными элементами
матрица с постоянными действительными элементами 
Напомним некоторые понятия из линейной алгебры. Вектор  называется собственным вектором матрицы А, если
называется собственным вектором матрицы А, если
Число называется собственным значением матрицы А, отвечающим собственному вектору g, и является корнем характеристического уравнения
где I — единичная матрица.
Будем предполагать, что все собственные значения  матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует
матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует  матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
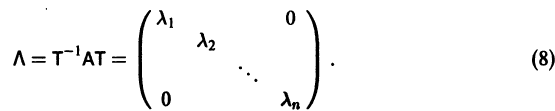
Столбцами матрицы Т являются координаты собственных векторов g1, g2 …, gn матрицы А.
Введем еще следующие понятия. Пусть В(t) — матрица, элементы  которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на
которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на  , если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы
, если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы  называется матрица, элементами которой являются производные
называется матрица, элементами которой являются производные  у соответствующих элементов матрицы В(t).
у соответствующих элементов матрицы В(t).
Пусть B(t) — n х n-матрица,
— вектор-столбец. Учитывая правила алгебры матриц, непосредственной проверкой убеждаемся в справедливости формулы

В частности, если В — постоянная матрица, то
так как  есть нуль-матрица.
есть нуль-матрица.
Теорема:
Если собственные значения матрицы А различны, то общее решение системы (7) имеет вид

где g1, g2,…, gn — собственные векторы-столбцы матрицы А,  произвольные постоянные числа.
произвольные постоянные числа.
Введем новый неизвестный вектор-столбец Y(t) по формуле

где Т — матрица, приводящая матрицу А к диагональному виду. Подставляя X(t) из (11) в (7), получим систему
Умножая обе части последнего соотношения слева на  и учитывая, что
и учитывая, что  придем к системе
придем к системе
Мы получили систему из n независимых уравнений, которая без труда интегрируется:

Здесь  — произвольные постоянные числа.
— произвольные постоянные числа.
Вводя единичные n-мерные векторы-столбцы
решение Y(t) можно представить в виде

В силу (11) Х(t) = TY(t). Так как столбцы матрицы Т есть собственные векторы матрицы  собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):
собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):

Таким образом, если матрица А системы дифференциальных уравнений (7) имеет различные собственные значения, для получения общего решения этой системы:
1) находим собственные значения матрицы как корни алгебраического уравнения
2) находим все собственные векторы g1, g2,…, gn;
3) выписываем общее решение системы дифференциальных уравнений (7) по формуле (10).
Пример:
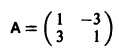
Матрица А системы имеет вид
1) Составляем характеристическое уравнение

Корни характеристического уравнения 
2) Находим собственные векторы

Для = 4 получаем систему
откуда g11 = g12, так что

Аналогично для = 1 находим
3) Пользуясь формулой (10), получаем общее решение системы дифференциальных уравнений
Корни характеристического уравнения могут быть действительными и комплексными. Так как по предположению коэффициенты системы (7) действительные, то характеристическое уравнение
будет иметь действительные коэффициенты. Поэтому наряду с комплексным корнем оно будет иметь и корень *, комплексно сопряженный с . Нетрудно показать, что если g — собственный вектор, отвечающий собственному значению , то * — тоже собственное значение, которому отвечает собственный вектор g*, комплексно сопряженный с g.
При комплексном решение

системы (7) также будет комплексным. Действительная часть
этого решения являются решениями системы (7). Собственному значению * будет отвечать пара действительных решений X1 и -Х2, т. е. та же пара, что и для собственного значения . Таким образом, паре , * комплексно сопряженных собственных значений отвечает пара действительных решений системы (7) дифференциальных уравнений.
Пусть  — действительные собственные значения,
— действительные собственные значения, 
 — комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид
— комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид

где сi — произвольные постоянные.
Пример:
1) Характеристическое уравнение системы

Его корни 
2) Собственные векторы матриц
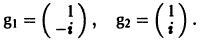
3) Решение системы

где а1, а2 — произвольные комплексные постоянные.
Найдем действительные решения системы. Пользуясь формулой Эйлера

Следовательно, всякое действительное решение системы имеет


где с1, с2 — произвольные действительные числа.
Понятие о системах дифференциальных уравнений
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Применение преобразования Лапласа к решению
линейных дифференциальных уравнений и систем
1°. Общие сведения о преобразовании Лапласа: оригинал и изображение
Функцией-оригиналом называется комплекснозначная функция действительного переменного , удовлетворяющая следующим условиям:
2) функция интегрируема на любом конечном интервале оси ;
3) с возрастанием модуль функции растет не быстрее некоторой показательной функции, т. е. существуют числа 0″ png;base64,iVBORw0KGgoAAAANSUhEUgAAADoAAAAQBAMAAAC1onFLAAAAMFBMVEVHcEwAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAlTPQ5AAAAD3RSTlMAgUHAYqEh5RGR0VIxELEI83NdAAABBklEQVQY02NgIAAcBRWA5EVBMVRhDjUwdfq/AZCc/kUBVXa6sC2IYjNfwMDANN8AVZKxguExiGYR/sDAwOcvAGK7XIDJsgcw7D8ApFlVfzAwCM0HG8yysAEqe16AQR+kgZ3xEwNbwHqIIMvKBAgDaJY+yLJklt8MfB2foXpYTCHS8gIM+SBZR6aPDFu4P8IsZDI9AJXtB8kGsX3leMD5Ce5aJuMDEFmwyQUMnzkTuD4gZIORZNkMGJYrQkyBmgx2PdDB+hOAzhBgsDdg2C8AleSGuqp9AsP+DQwMXQIMQL/GQ8ORZSnUR5y1DOFA3/7/zyDJsB5IooYG7yvXGoz4aoAzeYQYGADRdjuTYajQpgAAAABJRU5ErkJggg==» /> и такие, что для всех имеем
Изображением функции-оригинала по Лапласу называется функция комплексного переменного , определяемая равенством
при s_0″ png;base64,iVBORw0KGgoAAAANSUhEUgAAAFIAAAATBAMAAADxBkdhAAAAKlBMVEVHcEwAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAHrpZrAAAADXRSTlMAQcCBEFor0KCR6LBxSK9m8wAAAVlJREFUKM9jYCAaJBsbGx8jSqVj71LRWVuIUiqrwMB6iViVDHcT0AQNcaoUQBN0LsVh+3UGBlYlVSAnqUVaFarUASrPuKkFprJQ8JQKA0NUQmwAA0vBpZZciPnOxVClUQmzYSoXW1xyYGC7ycBewMB65DYD7waIOCtUaTHDDQY2EajtQMR8WVD6AgNj6lUGXgWoEawVYKWrpiYw9AglQFSyX2PgvGFsbMDAwHmFQXYDTKUGWOXZuwVsC1gVICqZ7jAw3wHLAl1gGwBVWAkOOja38IvMCowXoCpvMrDdYGAAKvGdwLAKotAV6szYCYzXgCovglQWMHBcZ1OYlcDWABRX4FmG6vVTCcwKTGCVsnfvKrDUWgQwX9oElJvb0ZSAGvJOmzUcOCFmgkP3IBCDDClngxjVipSEGBig7kQGLDexJg2g3zegCfFcxZ6KZoSjJ6FJShOwGwqMIwCRZlRL/vuSSQAAAABJRU5ErkJggg==» style=»vertical-align: middle;» />. Условие 3 обеспечивает существование интеграла (2).
Преобразование (2), ставящее в соответствие оригиналу его изображение , называется преобразованием Лапласа. При этом пишут .
Свойства преобразования Лапласа
Всюду в дальнейшем считаем, что
I. Свойство линейности. Для любых комплексных постоянных и
II. Теорема подобия. Для любого постоянного 0″ png;base64,iVBORw0KGgoAAAANSUhEUgAAADEAAAAQBAMAAABNQoq8AAAALVBMVEVHcEwAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAACttl6nAAAADnRSTlMAAcGe2BFbQSGBMfCxcU2qjNsAAADDSURBVBjTY2AgDYgvxCHB5WyyALtM9wW2HUhcDgs4006A8TGyyprjAlCWiwCjCpDNekkzACLQrA6RYnwkwKgHZK42DVFghkq5CcBlAhi4NjOwPSuGGtMJlmJ/xMCgV8DA9JSB6yXc8kg3IMEKkelTAOo2gMv4Iuypm8DA+DoArgVkGiPQbdpgGdY3DDAXQP3DAPKPiAFjkRMbiqsZ1iWwPweGkY+RafYxEL8IJsHA5jklAeSShQysIHtYEaHD2JbKwAAA/gYrl5lLD9QAAAAASUVORK5CYII=» />
III. Дифференцирование оригинала. Если есть оригинал, то
Обобщение: если раз непрерывно дифференцируема на и если есть оригинал, то
IV. Дифференцирование изображения равносильно умножению оригинала на «минус аргумент», т.е.
V. Интегрирование оригинала сводится к делению изображения на
VI. Интегрирование изображения равносильно делению на оригинала:
(предполагаем, что интеграл сходится).
VII. Теорема запаздывания. Для любого положительного числа
VIII. Теорема смещения (умножение оригинала на показательную функцию). Для любого комплексного числа
IX. Теорема умножения (Э. Борель). Произведение двух изображений и также является изображением, причем
Интеграл в правой части (14) называется сверткой функций и и обозначается символом
Теорема XI утверждает, что умножение изображений равносильно свертыванию оригиналов , т.е.
Отыскание оригиналов дробно-рациональных изображений
Для нахождения оригинала по известному изображению , где есть правильная рациональная дробь, применяют следующие приемы.
1) Эту дробь разлагают на сумму простейших дробей и находят для каждой из них оригинал, пользуясь свойствами I–IX преобразования Лапласа.
2) Находят полюсы этой дроби и их кратности . Тогда оригиналом для будет функция
где сумма берется по всем полюсам функции .
В случае, если все полюсы функции простые, т.е. , последняя формула упрощается и принимает вид
Пример 1. Найти оригинал функции , если
Решение. Первый способ. Представим в виде суммы простейших дробей
и найдем неопределенные коэффициенты . Имеем
Полагая в последнем равенстве последовательно , получаем
Находя оригиналы для каждой из простейших дробей и пользуясь свойствам линейности, получаем
Второй способ. Найдем полюсы функции . Они совпадают с нулями знаменателя . Таким образом, изображение имеет четыре простых полюса . Пользуясь формулой (17), получаем оригинал
Пример 2. Найти оригинал , если .
Решение. Данная дробь имеет полюс кратности и полюс кратности . Пользуясь формулой (16), получаем оригинал
2°. Решение задачи Коши для линейных дифференциальных уравнений с постоянными коэффициентами
Пусть требуется найти решение дифференциального уравнения второго порядка с постоянными коэффициентами
Будем считать, что функция и решение вместе с его производньь ми до второго порядка включительно являются функциями-оригиналами. Пусть . По правилу дифференцирования оригиналов с учетом (2) имеем
Применяя к обеим частям (1) преобразование Лапласа и пользуясь свойством линейности преобразования, получаем операторное уравнение
Решая уравнение (20), найдем операторное решение
Находя оригинал для , получаем решение уравнения (18), удовлетворяющее начальным условиям (19).
Аналогично можно решить любое уравнение n-го порядка с постоянными коэффициентами и с начальными условиями при .
Пример 3. Решить дифференциальное уравнение операторным методом
Решение. Пусть , тогда по правилу дифференцирования оригинала имеем
Известно, что поэтому, переходя отданной задачи (21)–(22) к операторному уравнению, будем иметь
Легко видеть, что функция удовлетворяет данному уравнению и начальному условию задачи.
Пример 4. Решить уравнение .
Решение. Так как и по условию , то операторное уравнение будет иметь вид
Отсюда находим операторное решение
Разлагаем правую часть на элементарные дроби:
Переходя к оригиналам, получаем искомое решение .
Пример 5. Решить уравнение .
Решение. Так как и по условию , то операторное уравнение будет иметь вид
и, следовательно, операторное решение
Разложим правую часть на элементарные дроби:
Переходя к оригиналам, получим решение поставленной задачи
3°. Решение систем линейных дифференциальных уравнений с постоянными коэффициентами
Пусть требуется найти решение системы двух уравнений с постоянными коэффициентами
удовлетворяющее начальным условиям
Будем предполагать, что функции , а также и являются функциями-оригиналами.
По правилу дифференцирования оригиналов с учетом (24) имеем
Применяя к обеим частям каждого из уравнений системы (23) преобразование Лапласа, получим операторную систему
Эта система является линейной алгебраической системой двух уравнений с двумя неизвестными и . Решая ее, мы найдем и , а затем, переходя к оригиналам, получим решение системы (23), удовлетворяющее начальным условиям (24). Аналогично решаются линейные системы вида
Пример 6. Найти решение системы дифференциальных уравнений операторным методом
удовлетворяющее начальному условию .
Решение. Так как и , то операторная система будет иметь вид
Решая систему, получаем
Разлагаем дроби, стоящие в правых частях, на элементарные:
Переходя к оригиналам, получим искомое решение
http://lfirmal.com/ponyatie-o-sistemah-differencialnyh-uravnenij/
http://mathhelpplanet.com/static.php?p=reshenie-du-i-sistem-operatornym-metodom