Приближённые методы решения СЛАУ
Лекция 1
Приближённые методы решения СЛАУ
А) Метод простых итераций.(Метод последовательных приближений).
Пусть дана система n линейных уравнений с n неизвестными: 
 (1)
(1)
или  где
где  — заданные числа;
— заданные числа; 
 .
.
Задаются произвольно n-чисел – нулевое приближение искомой функции.

Далее подставляем в правую часть системы (1) нулевое приближение и
находим первое приближение.
 ,
,  (2)
(2)
Затем по 1-ому приближению находят 2-ое, 3-е и т.д.
В результате для k-ого приближения получаем формулу:
 ,
,  (2’)
(2’)
Таким образом мы получили последовательность векторов
Х (0) ,Х (1) ,…, Х (К) , к=1,2,…
Если любая из таких последовательностей <Хi (к) > сходится некоторому пределу  xi k = ci , ,то данный вектор сi, является решением сист. (1)
xi k = ci , ,то данный вектор сi, является решением сист. (1)
В равенстве (2’) перейдем к пределу при k→∞ при замене хi на сi.

Теорема(достаточные условия сходимости простой итерации):
Пусть выполняется хотя бы одно из следующих условий (нормы матрицы):
а) Если максимум суммы модулей коэффициентов при неизвестных (по строкам) меньше 1: 
б) Если максимум суммы модулей коэффициентов при неизвестных (по столбцам) меньше 1: 
в) Если сумма всех элементов в квадрате меньше 1.

Если выполняется хотя бы одно, тогда справедливы утверждения:
1)система (1) имеет единственное решение (С1. Сn);
2)последовательность  , где i =
, где i =  определяется по формуле (2), при любом начальном приближении
определяется по формуле (2), при любом начальном приближении  сходится к соответствующим компонентам точного решения.
сходится к соответствующим компонентам точного решения.  i =
i =
3)для приближенного равенства верны оценки (x1 ( k ) ,…xn ( k ) )  (C1,…Cn),
(C1,…Cn),
а’) есливыполняется условие а), то
 ,
,
б’) если выполняется условие б), то
 ,
,
в’) если выполняется условие в), то
 .
.
Замечания:
1)Если нет никакой информации о точном решении СЛАУ, то за начальное приближение выбираем столбец свободных коэффициентов. 
 (из приведенной матрицы);
(из приведенной матрицы);
2)остановка вычислений производной по заданной величине абсолютной погрешности  и приведенным в теореме оценкам.
и приведенным в теореме оценкам.
Б) Метод Зейделя.
Этот метод является модификацией МПИ и заключается в том, что при вычислении (к+1) приближения неизвестного хi (i>1), используются уже вычисленные ранее (к+1) приближения неизвестных х1, х2,…, хi-1
Рассмотрим систему:  i=1,n
i=1,n
Пусть матрица α удовлетворяет одному из условий теоремы:
Если, а)  j. Аналогично, матрица называется нижнетреугольной, если все элементы выше главной диагонали (i
j. Аналогично, матрица называется нижнетреугольной, если все элементы выше главной диагонали (i
Прямой ход.
Это основной этап решения системы уравнений с помощью метода Гаусса. Его суть состоит в приведении исходной расширенной матрицы системы к верхнетреугольной матрице с помощью эквивалентных преобразований (добавление к строке любой линейной комбинации других строк и перестановка строк, т.е. уравнений). Формулы прямого хода соответствуют последовательному выражению переменных из уравнений и подстановке их в последующие уравнения, т.е. их фактическому исключению из последующих уравнений системы. При этом шагом считается исключение одной переменной из всех последующих уравнений системы.
Рассмотрим k-ый шаг прямого хода. На k-ом шаге матрица системы имеет вид:
Осталось n-k+1 неизвестных. Чтобы удалить х(k) из последней строчки, например, надо из нее вычесть k-ую строчку с таким коэффициентом, чтобы получить на месте аnk ноль. Для этого коэффициент должен быть равен cnk=ank/akk. Элемент аkk называется разрешающим элементом k-ого шага и должен быть отличен от 0.
Формулы прямого хода
cmk=amk/akk где 1 
 ,откуда получаем:
,откуда получаем: 
Лекция 2.
Выбор шага
1. Пусть требуется вычислить интеграл с точностью ε. Используя формулу соответствующего остаточного члена R, выбирают h таким образом, чтобы выполнялось неравенство  .
.
2. Двойной пересчёт. ( Правило Рунге).

Лекция 4
ЧИСЛЕННОЕ РЕШЕНИЕ ТРАНСЦЕНДЕНТНЫХ И НЕЛИНЕЙНЫХ УРАВНЕНИЙ.
Если алгебраическое или трансцендентное уравнение достаточно сложное, то его корни сравнительно редко удаётся найти точно. Поэтому большое значение приобретают способы приближённого нахождения корней уравнения и оценки степени их точности.
Процесс нахождения приближённых значений корней уравнения:
f(x) = 0, (1)
где функция f(x) определена и непрерывна в некотором конечном или
бесконечном интервале a n раз. Таким образом, число итераций n в данном методе зависит от предварительно заданной точности ε и от длины исходного отрезка и не зависит от вида функции f(x). Это является важным преимуществом метода половинного деления по сравнению с другими методами. Метод, однако, медленно сходится при задании высокой точности расчёта.
Метод хорд.
Пусть на отрезке [a,b] функция f(x) непрерывна и принимает на концах отрезка значения разных знаков, а производные f ′(x) и f ″(x) сохраняют постоянный знак на интервале (a,b). Тогда возможны четыре случая расположения дуги кривой (рис.4).




Рис.4.
В методе хорд за очередное приближение берём точку пересечения с осью Х прямой (рис.5), соединяющей точки (a,f(a)) и (b,f(b))
Причём одна из этих точек фиксируется − та, для которой знаки f(x) и f ″(x) одинаковы.
Для рис.5 неподвижным концом хорды является х =a.
Уравнение хорды АВ: 
Точка пересечения хорды с осью Х (у=0):  .
.
Теперь корень находится на отрезке [a,c1]. Заменяем b на с1.

Рис.5. Иллюстрация метода хорд.
Применяя метод хорд к этому отрезку, получим:
 .
.
Продолжим и т.д., получим:  (2) Условие окончания вычислений:
(2) Условие окончания вычислений:
│сn+1 − cn│ 0, то приближённое значение корня находят по формуле (2), если f′(x)∙f″(x) ( n ) ) = 0 или  .
.
Определение: Порядком дифференциального уравнения называется порядок наивысшей производной, входящей в уравнение.
у′-2ху 3 +5=0—— уравнение первого порядка,
у″+ky′-by-sinx=0—— уравнение второго порядка.
Задача Коши (для уравнения первого порядка):
у′ = f(x, y) (1) найти решение y = y(x),
удовлетворяющее начальному условию: у(х0)=у0. (1*).
Т.е. найти интегральную кривую, проходящую через точку М(х0, у0).
Если f(x,y) непрерывна в области R: |x-x0| ( n ) =f(x,y,y′,…,y ( n -1) ) задача Коши состоит в нахождении решения у = у(х), удовлетворяющего начальным условиям:
у(х0) = у0, у′(х0) = у′0, …, у ( n -1) (x0) = y ( n -1) 0 ― заданные числа.
Функция у = f(x, C1, C2,…, Cn), где С1,…, Сn― произвольные постоянные, называется общим решением ОДУ или общим интегралом.
Эти постоянные можно определить с помощью начальных условий. Решение ДУ при заданных начальных условиях называется его частным решением.
Определение: задача называется краевой, если указывается интервал интегрирования [a,b] и ставятся дополнительные условия для значений функции у и её производных на концах этого интервала.
Процесс познания закономерностей и стремление создать детальную картину исследуемых явлений приводит к более сложной количественной оценке, отражающей эти явления, а именно к функции многих переменных, зависящих как от пространственных координат, так и от времени u = f(x1, x2,…, xn, t).
Определение: Дифференциальным уравнением с частными производными называется уравнение, связывающее независимую переменные х1, х2, …, хn, t, искомую функцию
u = f (х1, х2, …, хn, t) и её частные производные:
 .
.
Постановка задачи.
Дано дифференциальное уравнение первого порядка: у′ = f(x,y) (1).
Требуется найти решение этого уравнения на отрезке [x0, xmax], удовлетворяющее начальным условиям: у(х0) = у0 (2).
В вычислительной практике более предпочтительным являются численные методы нахождения приближённого решения в фиксированных точках: х0 1 и b0 = 0 ― явными многошаговыми.
― при r > 1 и b0 ≠ 0 ― неявными многошаговыми.
Многошаговость нарушает однородность вычислительного процесса, используя для получения недостающей информации другие вычислительные схемы ( например, одношаговые).
А) Метод Эйлера.
| х | x0 | x1 | … | хn |
| y | y0 | y1 | … | yn |
Для решение Д.У.(1) с Н.У. (2) на отрезке [x0, xmax] по методу Эйлера, таблица приближённых значений у(х) для равноотстоящих узлов:
Абсолютная погрешность формулы (4) на каждом шаге имеет порядок h 2
 (5)
(5)
Формула (4) означает, что на отрезке [xk, xk+1] интегральная кривая y = y(x) приближённо заменяется прямолинейным отрезком, выходящим из точки М(хk;уk) с угловым коэффициентом f(хk;уk). В качестве приближения искомой интегральной кривой получаем ломаную линию с вершинами в точках М0(х0;у0), М1(х1;у1),…, Мn(хn;уn). Первое звено касается истинной интегральной кривой в точке М0(х0;у0).
Метод Эйлера может быть применён к решению системы ОДУ и ДУ высших порядков. Последние должны быть предварительно приведены к системе ОДУ первого порядка.
Пусть задана система ОДУ первого порядка:  (6)
(6)
Приближённые значения у(хi) ≈ yi, z(хi) ≈ zi вычисляются по формулам:
 (8)
(8)
Метод Эйлера обладает двумя существенными недостатками:
1) малой точностью (метод первого порядка точности);
2) систематическое накопление ошибок.
В) Модификации метода Эйлера.
1 ый усовершенствованный метод Эйлера.
Сначала вычисляют промежуточные значения:
 (9)
(9)
А затем полагают:  (10)
(10)
2 o й усовершенствованный метод Эйлера.
Сначала определяют «грубые приближения»:  (11)
(11)
И приближённо полагают:  (12)
(12)
Локальная погрешность на i-ом шаге:  . Оценка погрешности в точке хn может быть получена с помощью двойного просчёта (с шагом h и h/2):
. Оценка погрешности в точке хn может быть получена с помощью двойного просчёта (с шагом h и h/2):
 (13)
(13)
С.) Метод Рунге-Кутта. (4 го порядка)
Наиболее знаменитым из методов Рунге-Кутта является классический метод 4 го порядка
 (14)
(14)


 (15)
(15)
Грубая оценка погрешности (двойной просчёт):  (16)
(16)
Где у(хi) – точное решение, у * i – приближённое решение с шагом h/2, yi – … с шагом h .
Для оценки правильности выбора шага h используют равенство:
 (17)
(17)
q должно равняться нескольким сотым, иначе h уменьшается.
D). Метод Рунге–Кутта 3-го порядка




Многошаговые методы.
(используют информацию о нескольких предыдущих точках)
Д ) Алгоритм Адамса.
Пусть дано дифференциальное уравнение: у′ = f(x, y) (1)
с начальными условиями: у(х0) = у0 (1*)
Требуется найти решение уравнения (1) на отрезке [a,b].
Разобьём отрезок [a,b] на n равных частей точками хi = х0 + ih (i =0, 1, …, n).
1 ый этап: стартовая процедура. Используют какой-либо одношаговый метод того же порядка точности до тех пор, пока не будет получено достаточно значений для работы многошагового метода.
2 ой этап: рекурсивной процедуры. Определение: уk, yk+1,…, yn основано на интегрировании интерполяционного многочлена Ньютона.
Рабочие формулы явных методов Адамса (2-го, 3-го, 4-го порядков).
 (2)
(2)
 (3)
(3)
 (4)
(4)
Формулы (2)-(4) называются экстраполяционными и на практике используются в качестве прогноза.
Для улучшения точности или коррекции результата применяют неявные методы (используют ещё ненайденные значения: уk+1, yk+2,…).
 (5)
(5)
 (6)
(6)
 (7)
(7)
Формулы (5)-(7) называются интерполяционными.
Для грубой оценки точности (двойной просчёт): 
Лекция 1
Приближённые методы решения СЛАУ
А) Метод простых итераций.(Метод последовательных приближений).
Пусть дана система n линейных уравнений с n неизвестными:
(1)
или где — заданные числа; .
Задаются произвольно n-чисел – нулевое приближение искомой функции.
Далее подставляем в правую часть системы (1) нулевое приближение и
находим первое приближение.
, (2)
Затем по 1-ому приближению находят 2-ое, 3-е и т.д.
В результате для k-ого приближения получаем формулу:
, (2’)
Таким образом мы получили последовательность векторов
Х (0) ,Х (1) ,…, Х (К) , к=1,2,…
Если любая из таких последовательностей <Хi (к) > сходится некоторому пределу xi k = ci , ,то данный вектор сi, является решением сист. (1)
В равенстве (2’) перейдем к пределу при k→∞ при замене хi на сi.
Теорема(достаточные условия сходимости простой итерации):
Пусть выполняется хотя бы одно из следующих условий (нормы матрицы):
а) Если максимум суммы модулей коэффициентов при неизвестных (по строкам) меньше 1:
б) Если максимум суммы модулей коэффициентов при неизвестных (по столбцам) меньше 1:
в) Если сумма всех элементов в квадрате меньше 1.
Если выполняется хотя бы одно, тогда справедливы утверждения:
1)система (1) имеет единственное решение (С1. Сn);
2)последовательность , где i = определяется по формуле (2), при любом начальном приближении сходится к соответствующим компонентам точного решения. i =
3)для приближенного равенства верны оценки (x1 ( k ) ,…xn ( k ) ) (C1,…Cn),
а’) есливыполняется условие а), то
,
б’) если выполняется условие б), то
,
в’) если выполняется условие в), то
.
Замечания:
1)Если нет никакой информации о точном решении СЛАУ, то за начальное приближение выбираем столбец свободных коэффициентов. (из приведенной матрицы);
2)остановка вычислений производной по заданной величине абсолютной погрешности и приведенным в теореме оценкам.
Б) Метод Зейделя.
Этот метод является модификацией МПИ и заключается в том, что при вычислении (к+1) приближения неизвестного хi (i>1), используются уже вычисленные ранее (к+1) приближения неизвестных х1, х2,…, хi-1
Рассмотрим систему: i=1,n
Пусть матрица α удовлетворяет одному из условий теоремы:
Если, а) j. Аналогично, матрица называется нижнетреугольной, если все элементы выше главной диагонали (i
Итерационные методы решения системы линейных алгебраических уравнений
В данной статье мы расскажем общие сведения об итерационных методах решения СЛАУ, познакомим с методом Зейделя и Якоби, а также приведем примеры решения систем линейных уравнений при помощи данных методов.
Общие сведения об итерационных методах или методе простой итерации
Метод итерации — это численный и приближенный метод решения СЛАУ.
Суть: нахождение по приближённому значению величины следующего приближения, которое является более точным. Метод позволяет получить значения корней системы с заданной точностью в виде предела последовательности некоторых векторов (итерационный процесс). Характер сходимости и сам факт сходимости метода зависит от выбора начального приближения корня x 0 .
Рассмотрим систему A x = b .
Чтобы применить итерационный метод, необходимо привести систему к эквивалентному виду x = B x + d . Затем выбираем начальное приближение к решению СЛАУ x ( 0 ) = ( x 1 0 , x 2 0 , . . . x m 0 ) и находим последовательность приближений к корню.
Для сходимости итерационного процесса является достаточным заданное условие В 1 . Окончание итерации зависит от того, какой итерационный метод применили.
Метод Якоби
Метод Якоби — один из наиболее простых методов приведения системы матрицы к виду, удобному для итерации: из 1-го уравнения матрицы выражаем неизвестное x 1 , из 2-го выражаем неизвестное x 2 и т.д.
Результатом служит матрица В , в которой на главной диагонали находятся нулевые элементы, а все остальные вычисляются по формуле:
b i j = — a i j / a i i , i , j = 1 , 2 . . . , n
Элементы (компоненты) вектора d вычисляются по следующей формуле:
d i = b i / a i i , i = 1 , 2 , . . . , n
Расчетная формула метода простой итерации:
x ( n + 1 ) = B x ( x ) + d
Матричная запись (координатная):
x i ( n + 1 ) = b i 1 x n 1 + b i 2 x ( n ) 2 + . . . + b
Критерий окончания в методе Якоби:
x ( n + 1 ) — x ( n ) ε 1 , где ε 1 = 1 — B B ε
В случае если B 1 / 2 , то можно применить более простой критерий окончания итераций:
x ( n + 1 ) — x ( n ) ε
Решить СЛАУ методом Якоби:
10 x 1 + x 2 — x 3 = 11 x 1 + 10 x 2 — x 3 = 10 — x 1 + x 2 + 10 x 3 = 10
Необходимо решить систему с показателем точности ε = 10 — 3 .
Приводим СЛАУ к удобному виду для итерации:
x 1 = — 0 , 1 x 2 + 0 , 1 x 3 + 1 , 1 x 2 = — 0 , 1 x 1 + 0 , 1 x 3 + 1 x 3 = 0 , 1 x 1 — 0 , 1 x 2 + 1
Выбираем начальное приближение, например: x ( 0 ) = 1 , 1 1 1 — вектор правой части.
В таком случае, первая итерация имеет следующий внешний вид:
x 1 ( 1 ) = — 0 , 1 × 1 + 0 , 1 × 1 + 1 , 1 = 1 , 1 x 2 ( 1 ) = — 0 , 1 × 1 , 1 + 0 , 1 + 1 = 0 , 99 x 3 ( 1 ) = 0 , 1 × 1 , 1 — 0 , 1 × 1 + 1 = 1 , 01
Аналогичным способом вычисляются приближения к решению:
x ( 2 ) = 1 , 102 0 , 991 1 , 011 , x ( 3 ) = 1 , 102 0 , 9909 1 , 0111 , x ( 4 ) = 1 , 10202 0 , 99091 1 , 01111
Находим норму матрицы В , для этого используем норму B ∞ .
Поскольку сумма модулей элементов в каждой строке равна 0,2, то B ∞ = 0 , 2 1 / 2 , поэтому можно вычислить критерий окончания итерации:
x ( n + 1 ) — x ( n ) ε
Далее вычисляем нормы разности векторов:
x ( 3 ) — x ( 2 ) ∞ = 0 , 002 , x ( 4 ) — x ( 3 ) ∞ = 0 , 00002 .
Поскольку x ( 4 ) — x ( 3 ) ∞ ε , то можно считать, что мы достигли заданной точности на 4-ой итерации.
x 1 = 1 , 102 ; x 2 = 0 , 991 ; x 3 = 1 ,01 1 .
Метод Зейделя
Метод Зейделя — метод является модификацией метода Якоби.
Суть: при вычислении очередного ( n + 1 ) — г о приближения к неизвестному x i при i > 1 используют уже найденные ( n + 1 ) — е приближения к неизвестным x 1 , x 2 , . . . , x i — 1 , а не n — о е приближение, как в методе Якоби.
x i ( n + 1 ) = b i 1 x 1 ( n + 1 ) + b i 2 x 2 ( n + 1 ) + . . . + b i , i — 1 x i — 2 ( n + 1 ) + b i , i + 1 x i + 1 ( n ) +
+ . . . + b i m x m ( n ) + d i
За условия сходимости и критерий окончания итераций можно принять такие же значения, как и в методе Якоби.
Решить СЛАУ методом Зейделя. Пусть матрица системы уравнений А — симметричная и положительно определенная. Следовательно, если выбрать начальное приближение, метод Зейделя сойдется. Дополнительных условий на малость нормы некоторой матрицы не накладывается.
Решим 3 системы уравнений:
2 x 1 + x 2 = 3 x 1 — 2 x 2 = 1 , x 1 + 2 x 2 = 3 2 x 1 — x 2 = 1 , 2 x 1 — 0 , 5 x 2 = 3 2 x 1 + 0 , 5 x 2 = 1
Приведем системы к удобному для итерации виду:
x 1 ( n + 1 ) = — 0 , 5 x 2 ( n ) + 1 , 5 x 2 ( n + 1 ) = 0 , 5 x 1 ( n + 1 ) + 0 , 5 , x 1 ( n + 1 ) = — 2 x 2 ( n ) + 3 x 2 ( n + 1 ) = 2 x 1 ( n + 1 ) — 1 , 2 x 1 — 0 , 5 x 2 = 3 2 x 1 + 0 , 5 x 2 = 1 .
Отличительная особенность, условие сходимости выполнено только для первой системы:
Вычисляем 3 первых приближения к каждому решению:
1-ая система: x ( 0 ) = 1 , 5 — 0 , 5 , x ( 1 ) = 1 , 75 0 , 375 , x ( 2 ) = 1 , 3125 0 , 1563 , x ( 3 ) = 1 , 4219 0 , 2109
Решение: x 1 = 1 , 4 , x 2 = 0 , 2 . Итерационный процесс сходится.
2-ая система: x ( 0 ) = 3 — 1 , x ( 1 ) = 5 9 , x ( 2 ) = — 15 — 31 , x ( 3 ) = 65 129
Итерационный процесс разошелся.
Решение: x 1 = 1 , x 2 = 2
3-я система: x ( 0 ) = 1 , 5 2 , x ( 1 ) = 2 — 6 , x ( 2 ) = 0 2 , x ( 3 ) = 0 2
Итерационный процесс зациклился.
Решение: x 1 = 1 , x 1 = 2
Метод простой итерации
Если А — симметричная и положительно определенная, то СЛАУ приводят к эквивалентному виду:
x = x — τ ( A x — b ) , τ — итерационный параметр.
Расчетная формула имеет следующий внешний вид:
x ( n + 1 ) = x ( n ) — τ ( A x n — b ) .
Здесь B = E — τ A и параметр τ > 0 выбирают таким образом, чтобы по возможности сделать максимальной величину B 2 .
Пусть λ m i n и λ m a x — максимальные и минимальные собственные значения матрицы А .
τ = 2 / ( λ m i n + λ m a x ) — оптимальный выбор параметра. В этом случае B 2 принимает минимальное значение, которое равняется ( λ m i n + λ m a x ) / ( λ m i n — λ m a x ) .
Методы решения систем линейных алгебраических уравнений (СЛАУ) с примерами
Содержание:
Методы решения систем линейных алгебраических уравнений (СЛАУ)
Метод Крамера
Определение: Системой линейных алгебраических уравнений (СЛАУ) называется выражение 
Определение: Определитель, составленный из коэффициентов при неизвестных, называется главным определителем системы 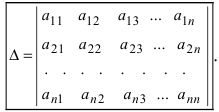
Крамер предложил следующий метод решения СЛАУ: умножим главный определитель на  для этого умножим все элементы первого столбца на эту неизвестную:
для этого умножим все элементы первого столбца на эту неизвестную: 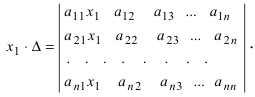
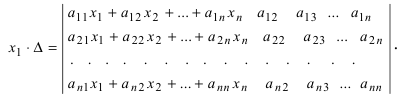
Второй столбец умножим на  третий столбец — на
третий столбец — на  -ый столбец — на
-ый столбец — на  и все эти произведения прибавим к первому столбцу, при этом произведение
и все эти произведения прибавим к первому столбцу, при этом произведение  не изменится:
не изменится:
Согласно записи СЛАУ первый столбец получившегося определителя представляет собой столбец свободных коэффициентов, т.е. 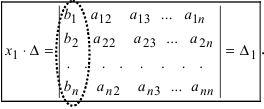
Определение: Определитель  называется первым вспомогательным определителем СЛАУ.
называется первым вспомогательным определителем СЛАУ.
Поступая аналогично тому, как описано выше, найдем все вспомогательные определители СЛАУ: 
31. Для того чтобы найти вспомогательный определитель i, надо в главном определителе СЛАУ заменить столбец i на столбец свободных коэффициентов.
Определение: Полученные выше соотношения называются формулами Крамера. Используя формулы Крамера, находят неизвестные величины  Проанализируем полученные формулы:
Проанализируем полученные формулы:
- если главный определитель системы отличен от нуля (
 ), то система имеет единственное решение;
), то система имеет единственное решение; - если главный определитель системы равен нулю (), а хотя бы один из вспомогательных определителей отличен от нуля ( или , или, . или ), то система не имеет решений (деление на нуль запрещено);
- если все определители системы равны нулю (), то система имеет бесчисленное множество решений.
 ), то система имеет единственное решение;
), то система имеет единственное решение; ), а хотя бы один из вспомогательных определителей отличен от нуля (
), а хотя бы один из вспомогательных определителей отличен от нуля (  или
или  , или, . или
, или, . или  ), то система не имеет решений (деление на нуль запрещено);
), то система не имеет решений (деление на нуль запрещено); ), то система имеет бесчисленное множество решений.
), то система имеет бесчисленное множество решений.Пример:
Решить СЛАУ методом Крамера 
Решение:
Прежде всего, обращаем внимание на то, что в последнем уравнении переменные записаны в неправильном порядке, в этом случае говорят, что СЛАУ записана в ненормализованном виде. Нормализуем СЛАУ, для чего запишем неизвестные в последнем уравнении системы в правильном порядке, чтобы одноименные неизвестные были записаны друг под другом
Найдем главный определитель СЛАУ (раскрываем по первой строке) 
Так как главный определитель системы отличен от нуля, то СЛАУ имеет единственное решение. Найдем три вспомогательных определителя 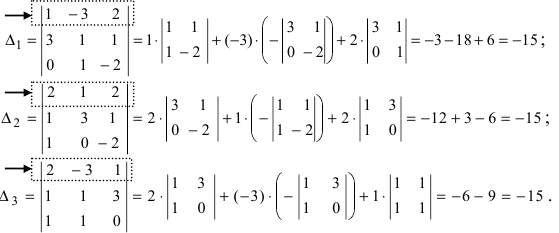
Воспользуемся формулами Крамера

Замечание: После нахождения решения СЛАУ надо обязательно провести проверку, для чего найденные числовые значения неизвестных подставляется в нормализованную систему линейных алгебраических уравнений.
Выполним проверку 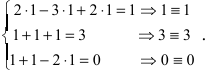 Отсюда видно, что СЛАУ решена верно.
Отсюда видно, что СЛАУ решена верно.
Матричный способ решения СЛАУ
Для решения СЛАУ матричным способом введем в рассмотрение матрицу, составленную из коэффициентов при неизвестных  матpицы-столбцы неизвестных
матpицы-столбцы неизвестных  и свободных коэффициентов
и свободных коэффициентов 
Тогда СЛАУ можно записать в матричном виде  Матричный способ решения СЛАУ состоит в следующем: умножим слева матричное уравнение на обратную матрицу
Матричный способ решения СЛАУ состоит в следующем: умножим слева матричное уравнение на обратную матрицу  к матрице А, получим
к матрице А, получим  в силу того, что произведение
в силу того, что произведение  найдем
найдем  Таким образом, для нахождения неизвестных матричным способом, надо найти обратную к А матрицу
Таким образом, для нахождения неизвестных матричным способом, надо найти обратную к А матрицу  после чего надо умножить эту матрицу на матрицу-столбец свободных коэффициентов.
после чего надо умножить эту матрицу на матрицу-столбец свободных коэффициентов.
Пример:
Решить СЛАУ матричным способом 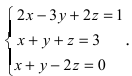
Решение:
Введем в рассмотрение следующие матрицы 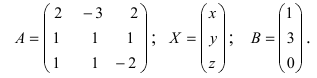
Найдем матрицу  (см. Лекцию № 2): найдем детерминант матрицы А.
(см. Лекцию № 2): найдем детерминант матрицы А.
Пример:

Решение:
Найдем алгебраические дополнения всех элементов 
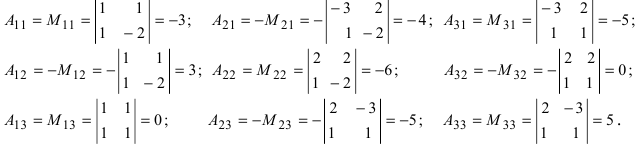 Запишем обратную матрицу
Запишем обратную матрицу 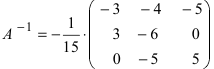 (в правильности нахождения обратной матрицы убедиться самостоятельно). Подействуем пай денной матрицей на матрицу-столбец свободных коэффициентов В:
(в правильности нахождения обратной матрицы убедиться самостоятельно). Подействуем пай денной матрицей на матрицу-столбец свободных коэффициентов В:
Отсюда находим, что х = 1; y = l; z = l.
Метод Гаусса
Метод Гаусса или метод исключения неизвестных состоит в том, чтобы за счет элементарных преобразований привести СЛАУ к треугольному виду. Покажем использование расширенной матрицы, составленной из коэффициентов при неизвестных и расширенной за счет столбца свободных коэффициентов, для приведения СЛАУ к треугольному виду на примере системы, рассматриваемой в этой лекции. Расширенная матрица для СЛАУ имеет вид: 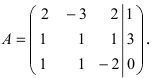
Замечание: В методе Гаусса желательно, чтобы первая строка расширенной матрицы начиналась с единицы.
Обменяем в расширенной матрице первую и вторую строки местами, получим 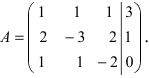 Приведем матрицу к треугольному виду, выполнив следующие преобразования: умножим элементы первой строки на (-2) и прибавим к соответствующим элементам второй строки
Приведем матрицу к треугольному виду, выполнив следующие преобразования: умножим элементы первой строки на (-2) и прибавим к соответствующим элементам второй строки 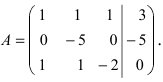 Разделим все элементы второй строки на (-5), получим эквивалентную матрицу
Разделим все элементы второй строки на (-5), получим эквивалентную матрицу 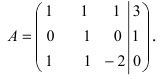
Умножим элементы первой строки на (—1) и прибавим к соответствующим элементам третьей строки 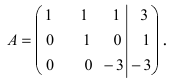 Разделим все элементы третьей строки на (-3), получим
Разделим все элементы третьей строки на (-3), получим 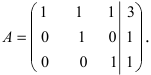 Таким образом, эквивалентная СЛАУ имеет вид (напомним, что первый столбец это коэффициенты при неизвестной х, второй — при неизвестной у, третий — при неизвестной z, а за вертикальной чертой находится столбец свободных коэффициентов):
Таким образом, эквивалентная СЛАУ имеет вид (напомним, что первый столбец это коэффициенты при неизвестной х, второй — при неизвестной у, третий — при неизвестной z, а за вертикальной чертой находится столбец свободных коэффициентов):
Из первого уравнения находим, что х = 1.
Вывод: Из вышеизложенного материала следует, что вне зависимости от
способа решения СЛАУ всегда должен получаться один и тот же ответ.
Замечание: После нахождения решения СЛАУ надо обязательно выполнить проверку, то есть подставить полученные значения неизвестных в заданную СЛАУ и убедиться в тождественности левой части всех равенств системы соответствующим правым частям. Отметим, что задание СЛАУ всегда верно, то есть, если проверка показывает нарушение оговоренной тождественности, то надо искать ошибку в проведенных вычислениях.
Ранг матрицы. Теорема Кронекера-Капелли
Определение: Рангом матрицы  называется наивысший порядок отличного от нуля минора этой матрицы.
называется наивысший порядок отличного от нуля минора этой матрицы.
Если  то среди всевозможных миноров этой матрицы есть хотя бы один минор порядка r, который отличен от нулю, а все миноры порядков больших, чем r, равны нулю.
то среди всевозможных миноров этой матрицы есть хотя бы один минор порядка r, который отличен от нулю, а все миноры порядков больших, чем r, равны нулю.
При вычислении ранга необходимо начинать вычислять миноры 2 порядка, затем миноры 3 порядка и так далее, пока не будут найдены миноры, обращающиеся в нуль. Если все миноры порядка p равны нулю, то и все миноры, порядок которых больше p, равны нулю.
Пример:
Найти ранг матрицы 
Решение:
Очевидно, что среди миноров второго порядка есть миноры отличные от нуля, например,  среди миноров третьего порядка также есть миноры, которые не равны нулю, например,
среди миноров третьего порядка также есть миноры, которые не равны нулю, например, 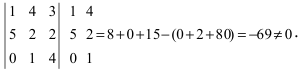 Очевидно, что определитель четвертого порядка равен нулю, так как он будет содержать строку, состоящую из одних нулей (см. свойство
Очевидно, что определитель четвертого порядка равен нулю, так как он будет содержать строку, состоящую из одних нулей (см. свойство  для определителей). Следовательно, ранг матрицы А равен 3.
для определителей). Следовательно, ранг матрицы А равен 3.
Теорема Кронекера-Капелли (критерий совместности СЛАУ). Для совместности системы линейных алгебраических уравнений (СЛАУ) необходимо и достаточно, чтобы ранг расширенной матрицы совпадал с рангом основной матрицы, составленной из коэффициентов при неизвестных величинах.
Следствия из теоремы Кронекера — Капелли
Следствие: Если ранг матрицы совместной системы равен числу неизвестных, то система имеет единственное решение (то есть она определенная).
Следствие: Если ранг матрицы совместной системы меньше числа неизвестных, то система имеет бесчисленное множество решений (т.е. она неопределенная).
В случае неопределенной системы решения ищут следующим образом: выбираются главные неизвестные, число которых равно рангу, а остальные неизвестные считаются свободными; далее главные неизвестные выражаются через свободные и получают множество решений, зависящих от свободных неизвестных. Это множество решений называется общим решением системы. Придавая свободным неизвестным различные произвольные значения, получим бесчисленное множество решений, каждое из которых называется частным решением системы.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Скалярное произведение и его свойства
- Векторное и смешанное произведения векторов
- Преобразования декартовой системы координат
- Бесконечно малые и бесконечно большие функции
- Критерий совместности Кронекера-Капелли
- Формулы Крамера
- Матричный метод
- Экстремум функции
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://zaochnik.com/spravochnik/matematika/issledovanie-slau/iteratsionnye-metody-reshenija-slau/
http://www.evkova.org/metodyi-resheniya-sistem-linejnyih-algebraicheskih-uravnenij-slau