Алгоритм нахождения векторов жорданова базиса
Собственные векторы и собственные значения
Пусть A – матрица некоторого линейного преобразования порядка n.
Определение. Многочлен n-ой степени
P(l)=det(A-lЕ) (1.1)
называется характеристическим многочленом матрицы А, а его корни, которые могут быть как действительными, так и комплексными, называются характеристическими корнями этой матрицы.
Определение. Ненулевой вектор x линейного пространства V, удовлетворяющий условию
А(х)=lх, (1.2)
называется собственным вектором преобразования A. Число l называется собственным значением.
Замечание. Если в пространстве V задан базис, то это условие можно переписать следующим образом:
Ах=lх, (1.3)
где A – матрица преобразования, x – координатный столбец.
Определение. Алгебраической кратностью собственного значения lj называется кратность корня lj характеристического многочлена.
Определение. Совокупность всех собственных значений называется спектром матрицы.
Алгоритм нахождения собственных значений и собственных векторов
1. Найти собственные значения матрицы:
· записать характеристическое уравнение:
det(A-lЕ)=0; (1.4)
· найти его корни l j, j=1. n и их кратности.
2. Найти собственные векторы матрицы:
· для каждого l j решить уравнение
· найденный вектор х и будет собственным вектором, отвечающим собственному значению l j.
Пример1
Найдем собственные значения и собственные векторы, если известна матрица преобразования:
Записываем характеристический многочлен (1.1) и решаем характеристическое уравнение (1.4):

Получаем два собственных значения: l1=1 кратности m1=2 и l2=-1 кратности m2=1.
Далее с помощью соотношения (1.5) находим собственные векторы. Сначала ищем ФСР для l1=1:

Очевидно, что rang=1, следовательно, число собственных векторов для l1=1 равно n-rang=2. Найдем их:
Аналогичным образом находим собственные векторы для l2=-1. В данном случае будет один вектор:

Понятие жордановой клетки и жордановой матрицы
Определение. Жордановой клеткой порядка m, отвечающей собственному значению l, называется матрица вида:
 (2.1)
(2.1)
Иными словами, на главной диагонали такой матрицы располагается собственное значение l, диагональ, ближайшая к главной, сплошь занята единицами, а все остальные элементы матрицы равны нулю. Ниже даны примеры жордановых клеток соответственно первого, второго и третьего порядков:
Определение. Блочно-диагональная матрица, на диагонали которой стоят жордановы клетки, называется жордановой матрицей:
 (2.2)
(2.2)
Пример
Ниже представлена жорданова матрица, состоящая из трех жордановых клеток:
— размера 1, отвечающая собственному значению l1=3;
— размера 2, отвечающая собственному значению l2=4;
— размера 3, отвечающая собственному значению l3=5.
Количество и размер жордановых клеток
Пусть А — матрица, которую нужно привести к жордановой форме, lj (k=1. mj) — собственные значения этой матрицы.
Количество жордановых клеток размера k, отвечающих собственному значению lj, определяется следующим образом:
 (3.1)
(3.1)
 (3.2)
(3.2)
Пример
Пусть дана матрица преобразования:
Найдем количество и размер жордановых клеток, соответствующих каждому собственному значению этого преобразования.
Как искать собственные значения, было подробно рассказано в первом параграфе учебника. Поэтому опустим все расчеты, а сразу укажем собственные числа матрицы А: l1=0 кратности m1=1 и l2=-1 кратности m2=2.
Используя соотношения (3.1) и (3.2), найдем количество и размер жордановых клеток, соответствующих l1=0, m1=1.
Очевидно, что rang(A-l1E)=2 и, соответственно, r 1 =r 2 =rang(A-l1E) 1 =2, r 0 =n=3.
Количество жордановых клеток размера 1 будет равно: r 0 -2r 1 +r 2 =3-2*2+2=1.
Ясно, что других клеток для этого собственного значения нет. Т.о., для l1=0, m1=1 мы имеем единственную жорданову клетку вида J1(0)=(0).
Далее аналогичным образом определяем клетки для второго собственного значения l2=-1 кратности m2=2.
Очевидно, что rang(A-l2E)=2 и, соответственно, r 1 =r 2 =rang(A-l2E) 1 =2.

Т.е. rang(A-l1E) 2 =1 и, соответственно, r 1 =r 2 =rang(A-l1E) 2 =1.
Теперь можно определить количество и размер жордановых клеток для второго собственного значения:
— размера 1: r 0 -2r 1 +r 2 =3-2*2+1=0;
— размера 2: r 1 -2r 2 +r 3 =2-2*1+1=1.
Таким образом, для l2=-1 мы получили одну клетку размера 2:
Соответственно, жорданова форма для исходной матрицы А будет иметь вид:
Жорданов базис
Пусть матрица А приведена к жордановой форме J. Рассмотрим систему HJ=AH, где
— матрица перехода от исходного базиса (e) к жорданову базису (h). Это система матричных n 2 уравнений с n 2 неизвестными.
Определение. Пусть e – собственный вектор преобразования А, т.е. имеет место равенство А(e) = le. Вектор e1, удовлетворяющий равенству
называется присоединенным вектором первого порядка;
вектор e2, удовлетворяющий равенству
— присоединенным вектором второго порядка;
вектор en, удовлетворяющий равенству
— присоединенным вектором n-ого порядка.
Заметим также, что
(А-lе) k ek=e. (4.5)
Алгоритм нахождения векторов жорданова базиса
Чтобы найти жорданов базис, необходимо проделать следующие действия для каждой жордановой клетки.
Рассмотрим жорданову клетку порядка k, отвечающую собственному значению l. Для нее ищутся вектора жорданова базиса:
h, h 1 , h 2 , . h k-1 , где:
h — собственный вектор, отвечающий собственному значению l;
h 1 — присоединенный вектор 1-ого порядка;
h 2 — присоединенный вектор 2-ого порядка;
h k-1 — присоединенный вектор (k-1)-ого порядка;
Эта совокупность векторов ищется, используя следующую систему:
 (4.6)
(4.6)
В результате применения этих операций ко всем жордановым клеткам, получим векторы, составляющие жорданов базис:
h, h 1 , h 2 , . h k-1 , f, f 1 , f 2 , . f p-1 .
Векторам h соответствует жорданова клетка размера k, векторам f – размера p и т.д.
ex3
Пример
Вернемся к примеру, рассмотренному в прошлом разделе. Там нами были получены две жордановы клетки:
J1(0)=(0) и
Рассмотрим первую, J1(0).
С помощью соотношения (1.5) из первого параграфа найдем собственный вектор, отвечающий собственному значению l1=0:

Присоединенных векторов для данной жордановой клетки, очевидно, нет.
Теперь рассмотрим вторую жорданову клетку, J2(-1). Очевидно, что для нее надо найти один собственный вектор и один присоединенный.
Используя систему (4.6), получим эти векторы:
 — собственный вектор, отвечающий l2=-1;
— собственный вектор, отвечающий l2=-1;
 — присоединенный вектор.
— присоединенный вектор.
Мы получили все векторы, составляющие матрицу Н. Таким образом, матрица перехода к жорданову базису будет иметь следующий вид:
§19.1 Собственные и присоединенные векторы линейного преобразования
Primary tabs

Forums:
Пусть $\lambda_0$- некоторое собственное значение преобразования $A.$ Мы уже имели раньше такое определение.
Определение 1. Вектор $x ≠ 0$ называется собственным вектором преобразования $A,$ отвечающим собственному значению $\lambda_0,$ если
$$ Ax = \lambda_0 x, \text <т. е.>(A — \lambda_0 E) x = 0. \qquad (1)$$
Рассмотрим совокупность всех векторов, удовлетворяющих условию (1) при фиксированном $\lambda_0$. Ясно, что совокупность этих векторов является подпространством пространства $R.$
Мы обозначим его $ N_<\lambda_0>^1.$ Легко видеть, что $ N_<\lambda_0>^1$ инвариантно относительно преобразования $A$ (проверьте!).
Заметим, что подпространство $ N_<\lambda_0>^1$ состоит из всех собственных векторов преобразования $A,$ отвечающих собственному значению $\lambda_0,$ к которым добавлен ещё нулевой вектор.
Определение 2. Вектор $x$ называется присоединенным вектором 1-го порядка преобразования $A,$ отвечающим собственному значению $\lambda_0,$ если вектор
$$ y = (A-\lambda_0 E)x $$
является собственным вектором преобразования $A.$
Пусть $\lambda_0$ — собственное значение преобразования $A.$
Рассмотрим подпространство, состоящее из всех векторов $x$, для которых выполнено условие
$$ (A-\lambda_0 E)^2 x = 0, \qquad (2)$$
т. е. ядро преобразования $(A-\lambda_0 E)^2.$ Обозначим это подпространство $ N_<\lambda_0>^2$ является инвариантным подпространством пространства $R.$ В самом деле, пусть $x \in N_<\lambda>^2$, т. е. $ (A — \lambda_0 E)^2 x = 0.$ Нам надо доказать, что и вектор $ Ax \in N_<\lambda_0>^2,$ т. е. что $(A — \lambda_0 E)^2 Ax = 0.$ Но преобразование $A$ перестановочно с $(A — \lambda_0 E)^2, $ т. е.
$$ (A — \lambda_0 E)^2 Ax = A(A — \lambda_0 E)^2 x = 0. $$
Рассмотрим несколько более подробно структуру пространства $ N_<\lambda_0>^2.$ В нем есть векторы двух типов.
Если $ x \in N_<\lambda_0>^1,$ т. е. $(A — \lambda_0 E) x = 0,$ то подавно и $ (A — \lambda_0 E)^2 x = 0,$ т. е. $ x \in N_<\lambda_0>^2.$ Таким образом, $ N_<\lambda_0>^1$ целиком содержится в $ N_<\lambda_0>^2.$ Если $ x \in N_<\lambda_0>^2,$ но $ x \overline <\in>N_<\lambda_0>^1,$ т. е.
$$ (A — \lambda_0 E) x ≠ 0, \\
(A — \lambda_0 E)^2 x = 0,$$
то $x$ — присоединенным вектор 1-го порядка. Действительно, в этом случае $ y = (A — \lambda_0 E)x$ есть собственный вектор.
Таким образом, подпространство $ N_<\lambda_0>^2$ получается, если к подпространству $ N_<\lambda_0>^1$ добавить присоединенные векторы 1-го порядка.
Аналогично вводим подпространство $ N_<\lambda_0>^k$, состоящее из всех векторов $x,$ для которых
$$ (A — \lambda_0 E)^k x = 0. \qquad (3)$$
Это подпространство инвариантно относительно преобразования $A.$ Ясно, что подпространство $ N_<\lambda_0>^k$ содержит предыдущее подпространство $ N_<\lambda_0>^<(k-1)>.$
Определение 3. Вектор $x$ называется присоединенным вектором k-го порядка, если вектор
$$ y = (A — \lambda_0 E) x $$
есть присоединенным вектор порядка $k-1$.
По индукции можно показать, что если $x$ — присоединенным вектор k-го порядка, то
$$ (A — \lambda_0 E)^k x ≠ 0, \\
(A — \lambda_0 E)^
Другими словами, присоединенным вектором k-го порядка называется вектор, принадлежащий $ N_<\lambda_0>^
Пример. Пусть $R$- пространство многочленов степени $ \leqslant n -1$ и преобразование $ A$ — дифференцирование:
$$ AP (t) = <
Легко видеть, что $ \lambda = 0$ есть собственное значение. Соответствующий ему собственный вектор $P(t) = const.$ Найдем для этого преобразования подпространства $ N_0^k$. По определению $N_0^k$ состоит из всех многочленов $P(t),$ для которых $A^k P(t) = 0,$ т. е.
$$ <
Это будут все многочлены, степень которых не превышает $k-1$. Присоединенным векторами k-го порядка будут многочлены, степень которых в точности равна $k-1$.
В этом примере размерность каждого из подпространств равна $ N_0^k$ и она растет от 1 до $n$ вместе с ростом $k$. Подпространство $N_0^n$ уже совпадает со всем пространством $R,$ и если мы захотим определять $ N_0^
Легко видеть также, что в этом примере $ AN_0^
Упражнение. Показать, что для любого линейного преобразования $A$ имеет место равенство
$$ (A — \lambda_0 E) N_<\lambda_0>^
Пусть $A$ — линейное преобразование, а $ \lambda_0$- его собственное значение. Покажем, что подпространства $ N_<\lambda_0>^1, N_<\lambda_0>^2, . $ сначала строго возрастают с ростом индекса, а затем, начиная с некоторого номера $ p \leqslant n,$ этот рост прекращается, т. е.
$$ N_<\lambda>^p = N_<\lambda_0>^
Мы уже показали, что каждое подпространство $ N_<\lambda_0>^k$ содержит $ N_<\lambda_0>^
Так как наше пространство конечномерно, то для какого-то $ p \leqslant n$ мы впервые получим, что $ N_<\lambda_0>^p = N_<\lambda_0>^
Докажем, что в этом случае $ N_<\lambda_0>^
Действительно, предположим противное, а именно, что $ N_<\lambda_0>^
,$ но для некоторого $ i > 0$ подпространство $ N_<\lambda_0>^
$$ x \in N_<\lambda_0>^
Это значит, что
$$ (A — \lambda_0 E)^
Обозначим через $y$ вектор $ y = (A — \lambda_0 E)^i x.$ Тогда первое из равенств (4) означает, что $ y \in N_<\lambda_0>^
Итак, пусть $ \lambda_0$- некоторое собственное значение преобразования $A.$ Основным результатом этого пункта является построение инвариантного подпространства $ N_<\lambda_0>^p, $ состоящего из всех собственных и присоединенных векторов, отвечающих этому собственному значению.
Кроме того, в п. нам понадобится более детальная структура $ N_<\lambda_0>^p.$ А именно, обозначая через $N_<\lambda_0>^k$ подпространство, состоящее из присоединенных векторов порядка $ \leqslant k -1,$ мы получили возрастающую цепочку инвариантн ых подпространств
$$ 0 \in N_<\lambda_0>^1 \in N_<\lambda_0>^2 . \in N_<\lambda_0>^p. \qquad \qquad (5)$$
Все члены цепочки различны. Подпространство $ N_<\lambda_0>^k$ состоит при этом из всех векторов $x,$ для которых
$$ (A — \lambda_0 E)^k x = 0, $$
т. е. это есть ядро преобразования $(A — \lambda_0 E)^k.$
Преобразование $ A — \lambda_0 E$ переводит каждое из подпространств цепочки (5) в предшествующее.
Системы дифференциальных уравнений с примерами решения и образцами выполнения
Также как и обыкновенные дифференциальные уравнения, системы дифференциальных уравнений применяются для описания многих процессов реальной действительности. В частности, к ним относятся различного рода физические и химические процессы, процессы нефте- и газодобычи, геологии, экономики и т.д. Действительно, если некоторые физические величины (перемещение тела, пластовое давление жидкости в фиксированной точке с тремя координатами, концентрация веществ, объемы продаж продуктов) оказываются меняющимися со временем под воздействием тех или иных факторов, то, как правило, закон их изменения по времени описывается именно системой дифференциальных уравнений, т.е. системой, связывающей исходные переменные как функции времени и производные этих функций. Независимой переменной в системе дифференциальных уравнений может выступать не только время, но и другие физические величины: координата, цена продукта и т.д.

Решение систем дифференциальных уравнений
К системе дифференциальных уравнений приводит уже простейшая задача динамики точки: даны силы, действующие на материальную точку; найти закон движения, т. е. найти функции  выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
Здесь x, у, z — координаты движущейся точки, t — время, f, g, h — известные функции своих аргументов.
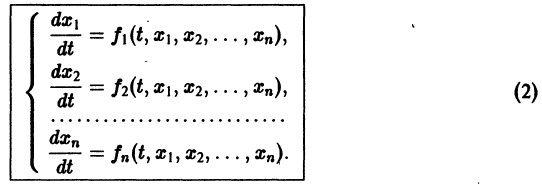
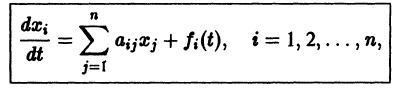
Система вида (1) называется канонической. Обращаясь к общему случаю системы т дифференциальных уравнений с т неизвестными функциями  аргумента t, назовем канонической систему вида
аргумента t, назовем канонической систему вида

разрешенную относительно старших производных. Система уравнений первого порядка, разрешенных относительно производных от искомых функций,

Если  в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из
в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из  уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
Например, одно уравнение
является мастным случаем канонической системы. Положив  в силу исходного уравнения будем иметь
в силу исходного уравнения будем иметь

В результате получаем нормальную систему уравнений

эквивалентную исходному уравнению.
Определение:
Решением нормальной системы (3) на интервале (а, Ь) изменения аргумента t называется всякая система n функций

дифференцируемых на интервале а 
Теорема:
Существования и единственности решения задачи Коши. Пусть имеем нормальную систему дифференциальных уравнений

и пусть функции  определены в некоторой (n + 1) — мерной области D изменения переменных
определены в некоторой (n + 1) — мерной области D изменения переменных  Если существует окрестность
Если существует окрестность  точки
точки  в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным
в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным  то найдется интервал
то найдется интервал  изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям
изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям

Определение:
Система n функций

зависящих от t и n произвольных постоянных  называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
1) при любых допустимых значениях система функций (6) обращает уравнения (3) в тождества,
2) в области функции (6) решают любую задачу Коши.
Решения, получающиеся из общего при конкретных значениях постоянных называются частными решениями.
Обратимся для наглядности к нормальной системе двух уравнений,
Будем рассматривать систему значений t, x1, х2 как прямоугольные декартовы координаты точки трехмерного пространства, отнесенного к системе координат  Решение
Решение
системы (7), принимающее при  значения
значения  определяет в пространстве некоторую линию, проходящую через точку
определяет в пространстве некоторую линию, проходящую через точку  Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Нормальной системе (7) и ее решению можно придать еще такое истолкование: будем независимую переменную t рассматривать как параметр, а решение
системы — как параметрические уравнения кривой на плоскости  Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение
Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение  системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку
системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку  (рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
(рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
Методы интегрирования систем дифференциальных уравнений
Метод исключения
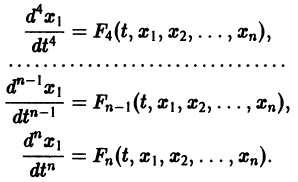
Один из методов интегрирования — метод исключения. Частным случаем канонической системы является одно уравнение n-го порядка, разрешенное относительно старшей производной
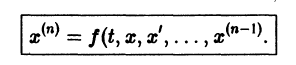
Введя новые функции  заменим это уравнение следующей нормальной системой n уравнений:
заменим это уравнение следующей нормальной системой n уравнений:
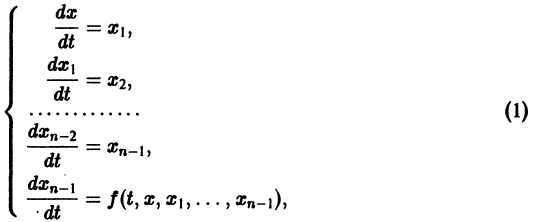
т. е. одно уравнение n-го порядка эквивалентно нормальной системе (1)
Можно утверждать и обратное, что, вообще говоря, нормальная система п уравнений первого порядка эквивалентна одному уравнению порядка n. На этом и основан метод исключения для интегрирования систем дифференциальных уравнений.
Делается это так. Пусть имеем нормальную систему
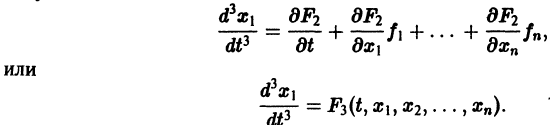
Продифференцируем первое из уравнений (2) по t. Имеем

Заменяя в правой части производные  их выражениями
их выражениями  получим
получим

Уравнение (3) снова дифференцируем по t. Принимая во внимание систему (2), получим
Продолжая этот процесс, найдем
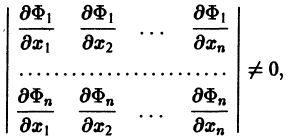
Предположим, что определитель
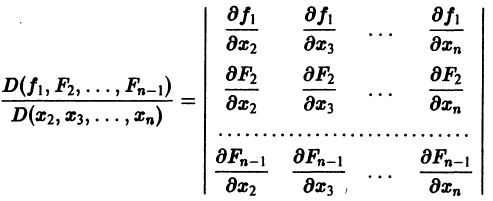
(якобиан системы функций  отличен от нуля при рассматриваемых значениях
отличен от нуля при рассматриваемых значениях 

Тогда система уравнений, составленная из первого уравнения системы (2) и уравнений
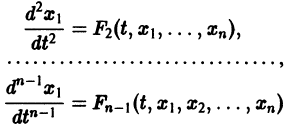
будет разрешима относительно неизвестных  При этом выразятся через
При этом выразятся через 
Внося найденные выражения в уравнение
получим одно уравнение n-го порядка

Из самого способа его построения следует, что если  есть решения системы (2), то функция х1(t) будет решением уравнения (5).
есть решения системы (2), то функция х1(t) будет решением уравнения (5).
Обратно, пусть Х1(t) — решение уравнения (5). Дифференцируя это решение по t, вычислим  и подставим найденные значения как известные функции
и подставим найденные значения как известные функции
от t в систему уравнений
По предположению эту систему можно разрешить относительно т. е найти как функции от t.
Можно показать, что так построенная система функций

составляет решение системы дифференциальных уравнений (2). Пример:
Требуется проинтегрировать систему

Дифференцируя первое уравнение системы, имеем

откуда, используя второе уравнение, получаем

— линейное дифференциальное уравнение второго порядка с постоянными коэффициентами с одной неизвестной функцией. Его общее решение имеет вид

В силу первого уравнения системы находим функцию

Найденные функции x(t), y(t), как легко проверить, при любых значениях С1 и С2 удовлетворяют заданной системе.
Функции x(t), y(t) можно представить в виде

откуда видно, что интегральные кривые системы (6) — винтовые линии с шагом  и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
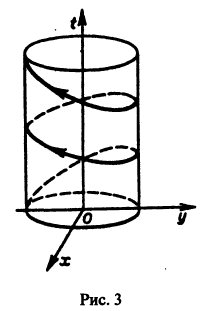
Исключая в формулах (7) параметр t, получаем уравнение
так что фазовые траектории данной системы суть окружности с центром в начале координат — проекции винтовых линий на плоскость хОу.
При А = 0 фазовая траектория состоит из одной точки х = 0, у = 0, называемой точкой покоя системы.
Замечание:
Может оказаться, что функции нельзя выразить через  Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
нельзя заменить эквивалентным уравнением второго порядка относительно х1 или x2. Эта система составлена из пары уравнений 1-го порядка, каждое из которых интегрируется независимо, что дает

Метод интегрируемых комбинаций
Интегрирование нормальных систем дифференциальных уравнений

иногда осуществляется методом интегрируемых комбинаций.
Интегрируемой комбинацией называется дифференциальное уравнение, являющееся следствием уравнений (8), но уже легко интегрирующееся.
Пример:
Складывая почленно данные уравнения, находим одну интегрируемую комбинацию:

Вычитая почленно из первого уравнения системы второе, получаем вторую интегрируемую комбинацию:

Мы нашли два конечных уравнения

из которых легко определяется общее решение системы:

Одна интегрируемая комбинация дает возможность получить одно уравнение

связывающее независимую переменную t и неизвестные функции Такое конечное уравнение называется первым интегралом системы (8). Иначе: первым интегралом системы дифференциальных уравнений (8) называется дифференцируемая функция  не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
Если найдено п первых интегралов системы (8) и все они независимы, т. е. якобиан системы функций  отличен от нуля:
отличен от нуля:
то задача интефирования системы (8) решена (так как из системы
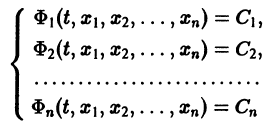
определяются все неизвестные функции 
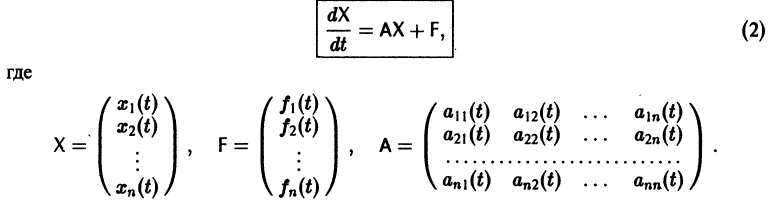
Системы линейных дифференциальных уравнений
Система дифференциальных уравнений называется линейной, если она линейна относительно неизвестных функций и их производных, входящих в уравнение. Система n линейных уравнений первого порядка, записанная в нормальной форме, имеет вид

или, в матричной форме,
Теорема:
Если все функции  непрерывны на отрезке
непрерывны на отрезке  то в достаточно малой окрестности каждой точки
то в достаточно малой окрестности каждой точки  где
где  выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
Действительно, в таком случае правые части системы (1) непрерывны по совокупности аргументов t, и их частные производные по  ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам
ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам 
Введем линейный оператор
Тогда система (2) запишется в виде

Если матрица F — нулевая, т. е.  на интервале (а,b), то система (2) называется линейной однородной и имеет вид
на интервале (а,b), то система (2) называется линейной однородной и имеет вид

Приведем некоторые теоремы, устанавливающие свойства решений линейных систем.
Теорема:
Если X(t) является решением линейной однородной системы

то cX(t), где с — произвольная постоянная, является решением той же системы.
Теорема:
двух решений  однородной линейной системы уравнений является решением той же системы.
однородной линейной системы уравнений является решением той же системы.
Следствие:
с произвольными постоянными коэффициентами сi решений  линейной однородной системы дифференциальных уравнений
линейной однородной системы дифференциальных уравнений
является решением той же системы.
Теорема:
Если  есть решение линейной неоднородной системы
есть решение линейной неоднородной системы

a Xo(t) — решение соответствующей однородной системы

будет решением неоднородной системы 
Действительно, по условию,

Пользуясь свойством аддитивности оператора  получаем
получаем

Это означает, что сумма  есть решение неоднородной системы уравнений
есть решение неоднородной системы уравнений
Определение:
называются линейно зависимыми на интервале a 
при  причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при
причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при  то векторы
то векторы 
 называются линейно независимыми на (а, b).
называются линейно независимыми на (а, b).
Заметим, что одно векторное тождество (5) эквивалентно n тождествам:

называется определителем Вронского системы векторов 
Определение:
Пусть имеем линейную однородную систему

где  матрица с элементами
матрица с элементами  Система n решений
Система n решений

линейной однородной системы (6), линейно независимых на интервале а 
с непрерывными на отрезке  коэффициентами
коэффициентами  является линейная комбинация п линейно независимых на интервале а
является линейная комбинация п линейно независимых на интервале а 
( ) — произвольные постоянные числа).
) — произвольные постоянные числа).
Пример:
имеет, как нетрудно проверить, решения

Эти решения линейно независимы, так как определитель Вронского отличен от нуля:

Общее решение системы имеет вид

(с1, с2 — произвольные постоянные).
Фундаментальная матрица
Квадратная матрица
столбцами которой являются линейно независимые решения  системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
Если Х(t) — фундаментальная матрица системы (6), то общее решение системы можно представить в виде
— постоянная матрица-столбец с произвольными элементами. Полагая в (7) t = t0, имеем

Матрица  называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
Теорема:
О структуре общего решения линейной неоднородной системы дифференциальных уравнений. Общее решение в области  линейной неоднородной системы дифференциальных уравнений
линейной неоднородной системы дифференциальных уравнений

с непрерывными на отрезке коэффициентами aij(t) и правыми частями fi(t) равно сумме общего решения
соответствующей однородной системы и какого-нибудь частного решения  неоднородной системы (2):
неоднородной системы (2):

Метод вариации постоянных
Если известно общее решение линейной однородной системы (6), то частное решение неоднородной системы можно находить методом вариации постоянных (метод Лагранжа).
есть общее решение однородной системы (6), тогда

причем решения Xk(t) линейно независимы.
Будем искать частное решение неоднородной системы

где  неизвестные функции от t. Дифференцируя по t, имеем
неизвестные функции от t. Дифференцируя по t, имеем
Подставляя  в (2), получаем
в (2), получаем

то для определения  получаем систему
получаем систему
или, в развернутом виде,

Система (10) есть линейная алгебраическая система относительно определителем которой является определитель Вронского W(t) фундаментальной системы решений . Этот определитель отличен от нуля всюду на интервале a 
где  — известные непрерывные функции. Интегрируя последние соотношения, находим
— известные непрерывные функции. Интегрируя последние соотношения, находим

Подставляя эти значения  в (9), находим частное решение системы (2)
в (9), находим частное решение системы (2)
(здесь под символом  понимается одна из первообразных для функции
понимается одна из первообразных для функции 
Системы линейных дифференциальных уравнений с постоянными коэффициентами
Рассмотрим линейную систему дифференциальных уравнений
в которой все коэффициенты  — постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
— постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
Мы рассмотрим еще метод Эйлера интегрирования линейных однородных систем дифференциальных уравнений с постоянными коэффициентами. Он состоит в следующем.
Метод Эйлера
Будем искать решение системы
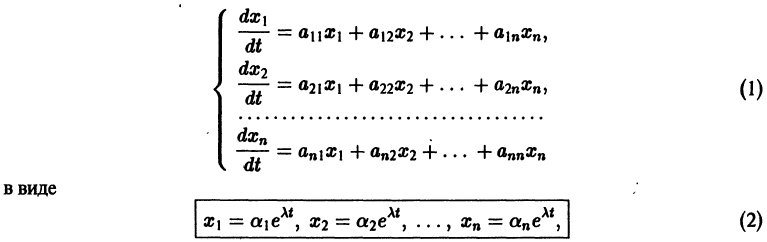
где  — постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на
— постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на  и перенося все члены в одну часть равенства, получаем систему
и перенося все члены в одну часть равенства, получаем систему
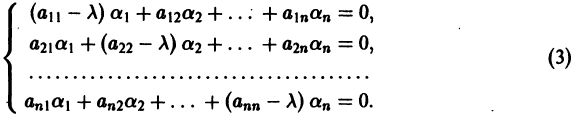
Для того, чтобы эта система (3) линейных однородных алгебраических уравнений с n неизвестными  имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
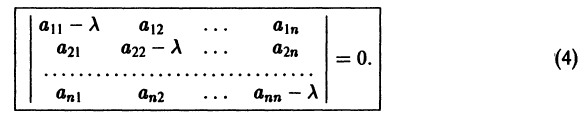
Уравнение (4) называется характеристическим. В его левой части стоит многочлен относительно  степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни
степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни  характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения
характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения  этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде
этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде

где второй индекс указывает номер решения, а первый — номер неизвестной функции. Построенные таким образом п частных решений линейной однородной системы (1)

образуют, как можно проверить, фундаментальную систему решений этой системы.
Следовательно, общее решение однородной системы дифференциальных уравнений (1) имеет вид
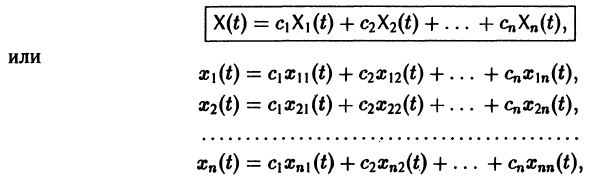
где  произвольные постоянные.
произвольные постоянные.
Случай, когда характеристическое уравнение имеет кратные корни, мы рассматривать не будем.
Пример:
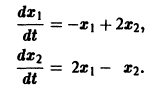
Ищем решение в виде


имеет корни 
Система (3) для определения a1, а2 выглядит так:

Подставляя в (*)  получаем
получаем
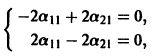
откуда а21 = а11. Следовательно,

Полагая в  находим a22 = — a12, поэтому
находим a22 = — a12, поэтому

Общее решение данной системы:
Матричный метод
Изложим еще матричный метод интегрирования однородной системы (1). Запишем систему (1) в виде

 матрица с постоянными действительными элементами
матрица с постоянными действительными элементами 
Напомним некоторые понятия из линейной алгебры. Вектор  называется собственным вектором матрицы А, если
называется собственным вектором матрицы А, если
Число называется собственным значением матрицы А, отвечающим собственному вектору g, и является корнем характеристического уравнения
где I — единичная матрица.
Будем предполагать, что все собственные значения  матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует
матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует  матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
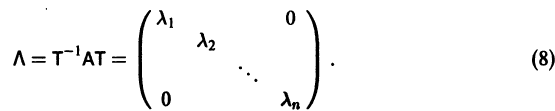
Столбцами матрицы Т являются координаты собственных векторов g1, g2 …, gn матрицы А.
Введем еще следующие понятия. Пусть В(t) — матрица, элементы  которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на
которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на  , если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы
, если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы  называется матрица, элементами которой являются производные
называется матрица, элементами которой являются производные  у соответствующих элементов матрицы В(t).
у соответствующих элементов матрицы В(t).
Пусть B(t) — n х n-матрица,
— вектор-столбец. Учитывая правила алгебры матриц, непосредственной проверкой убеждаемся в справедливости формулы

В частности, если В — постоянная матрица, то
так как  есть нуль-матрица.
есть нуль-матрица.
Теорема:
Если собственные значения матрицы А различны, то общее решение системы (7) имеет вид

где g1, g2,…, gn — собственные векторы-столбцы матрицы А,  произвольные постоянные числа.
произвольные постоянные числа.
Введем новый неизвестный вектор-столбец Y(t) по формуле

где Т — матрица, приводящая матрицу А к диагональному виду. Подставляя X(t) из (11) в (7), получим систему
Умножая обе части последнего соотношения слева на  и учитывая, что
и учитывая, что 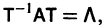 придем к системе
придем к системе
Мы получили систему из n независимых уравнений, которая без труда интегрируется:

Здесь  — произвольные постоянные числа.
— произвольные постоянные числа.
Вводя единичные n-мерные векторы-столбцы
решение Y(t) можно представить в виде

В силу (11) Х(t) = TY(t). Так как столбцы матрицы Т есть собственные векторы матрицы  собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):
собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):

Таким образом, если матрица А системы дифференциальных уравнений (7) имеет различные собственные значения, для получения общего решения этой системы:
1) находим собственные значения матрицы как корни алгебраического уравнения
2) находим все собственные векторы g1, g2,…, gn;
3) выписываем общее решение системы дифференциальных уравнений (7) по формуле (10).
Пример:
Матрица А системы имеет вид
1) Составляем характеристическое уравнение

Корни характеристического уравнения 
2) Находим собственные векторы

Для = 4 получаем систему
откуда g11 = g12, так что

Аналогично для = 1 находим
3) Пользуясь формулой (10), получаем общее решение системы дифференциальных уравнений
Корни характеристического уравнения могут быть действительными и комплексными. Так как по предположению коэффициенты системы (7) действительные, то характеристическое уравнение
будет иметь действительные коэффициенты. Поэтому наряду с комплексным корнем оно будет иметь и корень *, комплексно сопряженный с . Нетрудно показать, что если g — собственный вектор, отвечающий собственному значению , то * — тоже собственное значение, которому отвечает собственный вектор g*, комплексно сопряженный с g.
При комплексном решение

системы (7) также будет комплексным. Действительная часть
этого решения являются решениями системы (7). Собственному значению * будет отвечать пара действительных решений X1 и -Х2, т. е. та же пара, что и для собственного значения . Таким образом, паре , * комплексно сопряженных собственных значений отвечает пара действительных решений системы (7) дифференциальных уравнений.
Пусть  — действительные собственные значения,
— действительные собственные значения, 
 — комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид
— комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид

где сi — произвольные постоянные.
Пример:
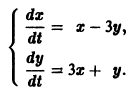
1) Характеристическое уравнение системы

Его корни 
2) Собственные векторы матриц
3) Решение системы

где а1, а2 — произвольные комплексные постоянные.
Найдем действительные решения системы. Пользуясь формулой Эйлера

Следовательно, всякое действительное решение системы имеет


где с1, с2 — произвольные действительные числа.
Понятие о системах дифференциальных уравнений
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://fkn.ktu10.com/?q=node/11580
http://lfirmal.com/ponyatie-o-sistemah-differencialnyh-uravnenij/