III.1.2 Инерционное звено
Звено называется инерционным, если связь между входным х(t) и выходным z(t) сигналами звена определяется дифференциальным уравнением вида
 . (III.1.2)
. (III.1.2)
Смысл коэффициентов T и k будет прояснен позже. Такое звено называют также апериодическим, статическим, одноёмкостным, релаксационным.
Надо заметить, что этот тип звена наиболее часто встречается в практике автоматического регулирования. В качестве примеров инерционного звена можно назвать термопару, магнитный усилитель, двигатель постоянного тока с независимым возбуждением, генератор и т.д.
Если к (III.1.2) применить преобразование Лапласа при нулевых
начальных условиях, то получится
 .
.
Найдем отсюда передаточную функцию звена
 . (III.1.3)
. (III.1.3)
Переходная характеристика звена определиться из выражения

На рисунке III.6 представлены для сравнения сигналы
Рис. III.6 Единичный скачок и переходная
функция инерционного звена.
Из рисунка видно, что, сравнивая установившееся значение выходного сигнала звена k и величину входного 1(t), можно сделать вывод, что параметр k в (III.1.2) есть коэффициент усиления звена. Из этого же рис. III.6. видно, что кривая 2 характеризует более замедленную, более инертную реакцию звена на единичный скачок. Для кривой 2 параметр Т1 (смысл которого ясен из рисунка) больше параметра Т для кривой 1. Значит, этот параметр может служить мерой инерционности звена. Обычно этот коэффициент Т называют постоянной времени звена.
Импульсная переходная (весовая) функция звена w(t), представленная на рис. III.7, определяется следующим образом
 .
.
Получим частотную передаточную функцию звена W(jω), заменив в (III.1.3) р на jω
 .
.
Отсюда легко определяются АЧХ A(ω) и ФЧХ φ(ω)

φ 
Качественный вид графиков, соответствующих вышенайденным зависимостям A(ω) и φ(ω), представлен на рис. III.8.
Рис.III.8. АЧХ и ФЧХ инерционного звена.
По найденным графикам A(ω) и φ(ω) на рис. III.9. построена амплитудно-фазовая характеристика инерционного звена
Рис. III. 9. АФХ инерционного звена.
Из выражения для АЧХ звена получим соотношение для точной ЛАЧХ
 . (III.1.4)
. (III.1.4)
В выражении для L(ω) вычислять слагаемое  для различных частот от 0 до ∞ представляет определенные неудобства. Вот если бы удалось диапазон частот 0 ≤ ω 1. Тогда асимптота второго участка может быть получена, если в выражении пренебречь первым слагаемым подкоренного выражения по сравнению со вторым
для различных частот от 0 до ∞ представляет определенные неудобства. Вот если бы удалось диапазон частот 0 ≤ ω 1. Тогда асимптота второго участка может быть получена, если в выражении пренебречь первым слагаемым подкоренного выражения по сравнению со вторым
 .
.
Поскольку при построении ЛАЧХ частоты по оси абсцисс откладываются в логарифмическом масштабе, то вторая асимптота представляет собой уравнение прямой, зависящей от частоты ω (т.е. проходящей с некоторым наклоном к оси частот). Ниже будет показано, как определять наклон таких асимптот.
Когда же сопрягаются, т.е. становятся равными, эти две асимптоты L1(ω) и L2(ω)? Очевидно, тогда, когда первое слагаемое подкоренного выражения точной кривой становится равным второму
Отсюда частота, при которой сопрягаются обе асимптоты, или сопрягающая частота
 .
.
Асимптоты L1(ω) и L2(ω) представляют собой совокупность прямых, приблизительно заменяющих точную кривую (рис. III.10). На этом рисунке помимо асимптот L1(ω) и L2(ω) пунктиром показана и упомянутая точная кривая.
Рис. III.10. Точная ЛАЧХ
Вернемся к выражению (III.1.4) для точной ЛАЧХ звена и построим асимптоты, приблизительно ее заменяющие.
Начинать построение ЛАЧХ рекомендуется с определения сопрягающих частот. Сопрягающих частот у ЛАЧХ будет столько, сколько звено (или САР) имеет постоянных времени. В случае инерционного звена из (III.1.3) видно, что имеется лишь одна постоянная времени Т и, значит, одна сопрягающая частота
 .
.
Эта сопрягающая частота делит ось частот на два участка ω ωc. Для более сложных звеньев или САР число постоянных времени может достигать произвольного значения m, тогда число участков будет m+1.
В случае инерционного звена рассмотрим
 или ω T 1. (III.1.6)
или ω T 1. (III.1.6)
Выражение для асимптоты II участка получается аналогично предыдущему случаю, только учитывать надо условие (III.1.6) и в члене следует пренебречь первым слагаемым по сравнению со вторым
 .
.
Как уже говорилось выше, с учетом логарифмического масштаба по оси частот данное выражение представляет собой прямую линию, имеющий некоторый наклон к оси абсцисс. Чтобы провести эту асимптоту на графике, необходимо знать ее наклон и точку, через которую проходит данная прямая. Что касается упомянутой точки, то найти ее легко, если понять, что конец предыдущей асимптоты является началом следующей. В самом деле, если взять конец первой асимптоты, т.е. ее значение при 
 ,
,
и начало второй асимптоты, т.е. ее значение при той же частоте
 ,
,
то подтверждается вышеприведенное утверждение
 .
.
Для определения наклона асимптоты к оси абсцисс найдем для частоты ω * , относящейся ко II участку
 .
.
Затем увеличим частоту ω * в 10 раз (т.е. на декаду) и получим значение L2(10 ω * )
 .
.
Легко понять, что если взять приращение ЛАЧХ
и отнести его к интервалу изменения частоты, то тем самым определиться наклон асимптоты к оси частот

Итак, наклон второй асимптоты L2(ω) составляет  , т.е. при росте частоты на 1 декаду L2(ω) уменьшается на 20 дб.
, т.е. при росте частоты на 1 декаду L2(ω) уменьшается на 20 дб.
Вообще же, чтобы не определять каждый раз подобным способом наклоны произвольной асимптоты полезно запомнить следующее правило: наклон асимптоты к оси частот определяется коэффициентом со знаком, стоящим при члене lgω в выражении для асимптоты.Например, если
 ,
,
то соответствующий наклон равен  , а при
, а при

этот наклон будет  .
.
На рис. III.11 изображена ЛАЧХ инерционного звена своими асимптотами (для к = 100)

 .
.
Часто ЛАЧХ звена или системы характеризуют путем обозначения наклонов ее асимптот. В данном случае эта характеристика будет выглядеть так  .
.
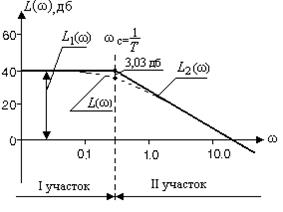
Рис. III. 11 ЛАЧХ инерционного звена.
На этом же рисунке пунктиром изображена точная ЛАЧХ L(ω) (III.1.4). Видно, что максимальная ошибка, возникающая от замены точной ЛАЧХ на асимптотическую, наблюдается на сопрягающей частоте  и для инерционного звена приблизительно равна 3,03 дб.
и для инерционного звена приблизительно равна 3,03 дб.
Чтобы оценить влияние параметров звена k и T на его ЛАЧХ, надо понять, что изменение k приводить к изменению  . Иными словами, при изменении k первая асимптота перемещается по вертикали параллельно самой себе. Но так как конец первой асимптоты является началом второй, т.е. первая и вторая асимптоты жестко связаны, то точно такое же перемещение по вертикали будет претерпевать и вся асимптотическая ЛАЧХ.
. Иными словами, при изменении k первая асимптота перемещается по вертикали параллельно самой себе. Но так как конец первой асимптоты является началом второй, т.е. первая и вторая асимптоты жестко связаны, то точно такое же перемещение по вертикали будет претерпевать и вся асимптотическая ЛАЧХ.
Понятно так же, что при изменении Т меняется сопрягающая частота . Значит, при изменении T ЛАЧХ инерционного звена будет перемещаться по горизонтали параллельно самой себе.
Дата добавления: 2016-04-14 ; просмотров: 2687 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
3.8 Инерционно-интегрирующее звено (интегрирующее звено с замедлением)
Лекции по курсу «Управление Техническими Системами» читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки» факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность!
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется. В предыдущих сериях:
Для вывода уравнения инерционно-интегрирующего звена интегрирующеезвеносзамедлением обратимся к нашему любимому гидравлическому демпферу.
Мы уже рассматривали систему уравнений и динамическую модель вот в этой Математическое описание систем автоматического управления ч. 2.9 — 2.13.
Немного модифицируем исходную модель, заменив пружину на внешнее воздействие. Схема видоизменной модели приведена на рисунке 1.
 Рисунок 3.8.0. Схема гидравлического демпфера.
Рисунок 3.8.0. Схема гидравлического демпфера.
Уравнения движения плунжера при данной схеме принимают вид:

 — масса плунжера;
— масса плунжера;
 — ускорение плунжера;
— ускорение плунжера;
 — давление в камере гидроцелиндра;
— давление в камере гидроцелиндра;
 — площадь плунжера;
— площадь плунжера;
 — сила действующая на плунжер возмущающее воздействие;
— сила действующая на плунжер возмущающее воздействие;
 — коэффициент трения скольжения;
— коэффициент трения скольжения;
 — корость перемещения плунжера;
— корость перемещения плунжера;
 — сила трения.
— сила трения.
Если объем камеры достаточно большой, а модуль объемной упругости маленький, то малые перемещения плунжера не меняют давление в камере. Можно перенять, что p = cost; Тогда начальное значение силы, при которой систем находится в равновесии:

А входное воздействие можно записать как:

Получим уравнение в виде:

Заменим переменные. Пусть для звена входным xt воздействием будет относительное отклонение силы от начального равновесного состояния, тогда изменив обозначение получим:

А выходным значение yt будет относительное отклонение от начального положения плунжера:

тогда для производных:

Подставляя в уравнения, получим:

Если разделить все уравнение на  Fполучим уравнение инерционно интегрирующего звена:
Fполучим уравнение инерционно интегрирующего звена:



Мы опять получили размерность времени для коэффициентов уравнения динамики.
Если разделить обе части уравнения на T1 3.8.1, можно получить вторую форму уравнения для инерционно-интегрирующего звена:


Во втором случае размерность коэффициента 
Используя преобразования по Лапласу, получим две формы уравнения в изображениях:


Передаточная функция в двух вариантах:

где  -безразмерный кофээфицента, а
-безразмерный кофээфицента, а 
АФЧХ:




Анализ формул  и
и  при разных значения
при разных значения  показывает что:
показывает что:

 Рисунок 3.8.1 АФЧХ инерционно-интегрирующего звена (если k – безразмерный коэффициент)
Рисунок 3.8.1 АФЧХ инерционно-интегрирующего звена (если k – безразмерный коэффициент)
Для воторого варианта передаточной функции:


Анализ формул и при разных значения показывает что:

 Рисунок 3.8.2 АФЧХ инерционно-интегрирующего звена (если k имеет размерность 1/с)
Рисунок 3.8.2 АФЧХ инерционно-интегрирующего звена (если k имеет размерность 1/с)
Амплитуда модуль:


Сдвиг фазы:

Логарифмическая амплитудная характеристика ЛАХ:

Построим соответствующие графики:
Рисунок 3.8.3 АЧХ и ФЧХ инерционно-интегрирующего звена Рисунок 3.8.4 ЛАХ и ЛФЧХ инерционно-интегрирующего звена
Переходная функция находится, с использованием передаточной функции и функции единичесного сутпенчатого воздействия 1t, в изображениях единичное ступенчатое воздействие — 

Для нахождения оригинала по изображению воспользуемся формулой Хэвисайда, для изображений имеющих вид:
 , где D1s и D0s – полиномы по степеням «s», оригинал принимает вид:
, где D1s и D0s – полиномы по степеням «s», оригинал принимает вид:

где sj – полюса изображения, т.е. те значения «s» при которых полином D0s обращается в ноль; kj – кратность j – го полюса.
Полиномы функции функции 
Полюса полинома 

 Рисунок 3.8.5 Переходная функция инерционно-интегрирующего звена
Рисунок 3.8.5 Переходная функция инерционно-интегрирующего звена
Весовая функция получается дифференцированием по времени переходной:

Примерами инерционно-интегрирующих звеньев являются:
Интегрирующий привод (например, электродвигатель с редуктором с учетом механической инерционности якоря двигателя и зубчатых колес редуктора), где входное воздействие – напряжение в обмотке возбуждения, выходное – угол поворота выходного вала редуктора)
Гидравлический демпфер, если учитывать инерционность поршня и сопротивление трения (F(t) – входное воздействие, y(t) – выходной параметр).
Пример
Мы уже обращали внимание, что абсолютно разные физические системы с помощью волшебства «Теории Автоматического Управления» превращаются в абсолютно одинаковые математические модели. Например, в лекции «Апериодическое звено 1-го порядка» камера смешения реактора (теплогидравлические уравнения) и электрическая цепь (уравнения электротехники) описываются одинаковыми передаточными функциями. И при моделировании выдают одинаковые графики АФЧХ и годографов!
В этой лекции у нас обратное волшебство: одна и та же физическая система может быть представлена разными передаточными функциями. Попробуем посмотреть на это волшебство на примере сравнения разных математических моделей для одной и той же системы – гидравлического демпфера. Сравнивать будем отклик на ступенчатое воздействие.
В статье «Математическое описание систем автоматического управления ч. 2.9 — 2.13» мы уже разбирали способы создания математической модели такого гидравлического демпфера. Для удобства построения графика изменим направление оси х так, чтобы положительное направление совпадало с направление действия силы. См. схему на рисунке 3.8.10:
Рисунок 3.8.10. Схема модели гидравлического демпфера
Тогда уравнение движения плунжера примет следующий вид:

В начале лекции мы принимаем допущение, что объем камеры большой, а величина перемещения плунжера и модуль упругости среды малые настолько, что перемещение не вызывает изменения давления. И получаем уравнения для инерционно-интегрирующего звена. Составим модель в виде структурной схемы из типовых блоков:
Рисунок 3.8.11. Структурная схема модели плунжера при p = const
В качестве параметров возьмем основные технические характеристики, которые были использованы при решении подобной задачи ранее, и запишем их в глобальном скрипте модели:
Рисунок 3.8.12. Параметры модели.
В начальный момент входное воздействие уравновешивает давление в камере,  на первой секунде происходит увеличение на 10Н. Параметры блока приведены на рисунке 5.
на первой секунде происходит увеличение на 10Н. Параметры блока приведены на рисунке 5.
Рисунок 3.8.13. Параметры ступенчатого воздействия
Результат такого воздействия вызывает перемещение плунжера в полном соответствии с теоретическим решением в лекции. На рисунке 3.8.14 представлен график перемещения плунжера в течение 3 секунд, а также увеличенный участок сразу после ступенчатого изменения воздействия.
Рисунок 3.8.14 Перемещение плунжера.
Модель в виде структурной схемы, повторяющей уравнения движения, можно представить в виде одного блока «Инерционно-интегрирующее звено». Как было показано в начале, параметры блока будут следующими:

В формуле коэффициента усиления присутствует начальное положение x0, которое необходимо для пересчета из относительной величины перемещения в абсолютную. Но поскольку сам пересчет заключается в умножении на x0 , то ее можно сократить, Таким образом, мы получим сразу перемещение в абсолютных единицах [м], а параметры блока инерционно-интегрирующего звена будут такими, как показано на рисунке 3.8.15
Рисунок 3.8.15. Параметры модели в виде одного блока.
Для использования данного блока в модели необходимо размерные параметры силы перевести в безрамные с помощью блока линейное преобразование. Тогда общая модель будет выглядеть так, как показано на рисунке 3.8.16:
3.8.16. Сравнение модели в виде блока и схемы
Результаты моделирования показывают полное совпадение модели в виде одного блока и модели в виде структурной схемы см. рис. 3.8.17
Рисунок 3.8.17 Сравнение схемы и блока.
Сравним модель с постоянным давлением в камере с моделью, где учитывается сжимаемость жидкости и изменение объема при перемещении плунжера, но расход со стороны дросселя Q равен 0.
В общем случае производная давления в камере будет описываться следующим уравнением:

Где: Q – расход в камере (у нас он равен 0), V — объем камеры, Ap – площадь плунжера, x’- скорость перемещения, E — объемный модуль упругости. Поскольку мы изменили направление х, то положительная величина скорости будет увеличивать давление в камере (см. рис. 3.8.10).
Создадим вторую модель с учетом сжимания в среды камере демпфера (см. рис. 3.8.18)
Рисунок 3.8.18 Модель плунжера с камерой
Сравнение расчёта двух моделей показывает, что учет сжимаемости жидкости в камере сразу приводит к кардинально другим результатам: вместо линейного роста перемещения мы получаем колебательный процесс и новое положение равновесия, жидкость в камере с учетом сжимаемости ведет себя как пружина, однако на масштабированном графике видно, что в начальный момент времени графики двух моделей достаточно хорошо совпадают (см. рис. 3.8.19):
Рисунок 3.8.19 Сравнение моделей с камерой и без камеры (среда — жидкость)
Таким образом упрощенная модель может достаточно точно описывать поведение демпфера при малых перемещениях и нагрузках.
В примере выше в качестве среды используется жидкость с модулем объемной упругости E = 13e8. Если вместо жидкости в демпфере будет использоваться воздух с модулем упругости E = 1.42e5, при тех же воздействиях мы увидим переходной процесс, приведенный на рисунке 3.8.20, где совпадения процессов идут в более широком диапазоне перемещения.
Рисунок 3.8.20 Сравнение моделей с камерой и без камеры (среда – воздух).
Как мы видим, принятое упрощение модели работает только в ограниченном диапазоне перемещения. Как только перемещения плунжера становятся значительными, давление в камере начинает изменяться, и принятые допущения уже не работают. Еще раз усложним модель, добавив в модель дроссель, который соединяет камеру демпфера с источником постоянного давления.
Такая модель будет более точно отображать гидравлическую систему, в которой есть источник давления (например, магистраль) и исполнительные механизмы (гидроцилиндры).
Расход через дроссель определяется по формуле:

Q – расход через дроссель, μ — коэффициент расхода, f – площадь сечения дросселя, pn – давление в линии нагнетания, p – давление в камере.
Значения для этих параметров возьмем из предыдущего примера и добавим в общий скрипт проекта (см. ниже). Закомментированные строки позволяют менять среду в модели (воздух или гидравлическая жидкость).
Рисунок 3.8.21 Модель с учетом дросселя.
Графики перемещения для всех трех моделей в случае среды гидравлической жидкости приведены на рисунке 3.8.22 Видно, что добавление дросселя и объема с постоянным давлением делает отклик системы более похожим на отклик одного звена (отличается только угол наклона, который соотвесвует установившемуся давление в камере).
Рисунок 3.8.22 Перемещения плунжера для разных вариантов модели (среда — жидкость).
Увеличенный график показывает, что при малых перемещениях, в начале процесса все три модели дают очень близкий результат.
Если заменить в модели жидкость на воздух (изменить модуль объемной упругости и плотность среды), то все 3 модели дают очень близкий результат в большем диапазоне перемещения плунжера. (см. рис. 3.8.23). Увеличение показывает, что все три модели ведут себя практически аналогично инерционно-интегрирующему звену.
Рисунок 3.8.23 Перемещения плунжера для разных вариантов модели (среда — воздух).
Выводы.
Приведенные примеры показывают, что при малых перемещениях плунжера демпфера вполне можно обходиться одним расчетным блоком вместо полной модели. Например, если мы исследуем вибрации с малой амплитудой. Однако, всегда нужно помнить о границах применимости принятых допущений. В рассмотренном примере при замене среды жидкости на газ упрощенная модель из одного блока работает практически идентично полной модели из трех дифференциальных уравнений и одного алгебраического.
Как показывет разобранный пример, одна и та же физическая система может моделироваться различными моделями и различными передаточными функциями в зависимости от параметров моделируемого процесса.
Апериодическое (инерционное, статическое) звено. Передаточная функция и уравнения

Дифференциальное уравнение, описывающее взаимосвязь входного и выходного сигналов апериодического типового динамического звена (ТДЗ), можно представить в следующем виде:

Где: k – коэффициент передачи, Т0 – постоянная времени.
Дифференциальное уравнение является не самой удобной формой представления математической модели объекта или звена. Это связано с тем, что решения любого дифференциального уравнения довольно сложная вычислительная процедура. Более удобна и, соответственно чаще используемая, математическая модель объекта, записанная в виде передаточной функции.
Передаточная функция – это преобразованное по Лапласу исходное дифференциальное уравнение, то есть уравнение, записанное в виде преобразованных по Лапласу выходного и входного сигналов объекта (звена).
Исходное дифференциальное уравнение в преобразовании Лапласа называют оригиналом, а записанное в операторной форме преобразованное уравнение – его изображением. Суть преобразования Лапласа заключается в замене на функции комплексных переменных Хвых(р) и Хвх(р) функций вещественных переменных Хвых(τ) и Хвх(τ), где р – оператор Лапласа (комплексное число р = ±m±in). Данные функции связываются между собой интегралом Лапласа:

Для большинства используемых в ТДЗ дифференциальных уравнений, чисто формальным условием перехода от оригинала к изображению будут представленные ниже замены:

Использовав приведенное выше условие довольно легко получить изображение, то есть перейти к операторной форме записи дифференциального уравнения апериодического звена.
Оригинал дифференциального уравнения апериодического звена имеет следующий вид:
Операторная форма записи (изображения) уравнения апериодического звена:

Огромным преимуществом данного преобразования является то, что записанное в операторной форме исходное дифференциальное уравнения становится алгебраическим. Но стоит отметить, что если бы все дифференциальные уравнения можно было бы преобразовать по Лапласу, то в математике произошла бы революция, так как решение алгебраических уравнение значительно проще дифференциальных. К сожалению, такое преобразование возможно лишь для ограниченного количества уравнений, в том числе для уравнений типовых динамических звеньев (ТДЗ).
Поскольку уравнение апериодического звена приняло вид алгебраического, то его можно записать следующим образом:

Из полученного выражения достаточно легко выделить отношение Хвых(р) / Хвх(р), которое называется передаточной функцией и для апериодического звена имеет вид:

У каждого типового динамического звена присутствует ряд типовых частотных характеристик: амплитудно-частотную (АЧХ), фазочастотную (ФЧХ), амплитудно-фазовую частотную (АФЧХ или АФХ), логарифмическую амплитудно-частотную (ЛАЧХ), логарифмическую фазочастотную (ЛФЧХ).
На практике чаще всего используется АФЧХ или АФХ.
Амплитудно-фазовая характеристика это вектор, а график АФХ – годограф этого вектора, то есть кривая на комплексной плоскости, которую описывает конец вектора при изменении частоты ω от 0 до ∞. Вектор характеризуется двумя величинами – длина (скаляр или вектор по модулю) и направление (градиент).
Вектор аналитически можно записать в виде двух проекций на действительную и мнимую оси, и выразить эти проекции через угол α:

После использования формулы Эйлера:

Где |W| — длина вектора или вектор по модулю, i – мнимое число:

Аналитическое выражение для любого вектора АФХ любого типичного динамического звена легко получить из передаточной функции, заменив в ней оператор Лапласа р на выражение iω. Где ω – частота колебаний (ω = 2π/Т), Т – период колебаний.
Для апериодического звена амплитудно-фазовая частотная характеристика (АФХ) имеет вид:

Для записи вектора АФХ в виде проекций на действительную и мнимую ось необходимо произвести следующие преобразования:

Изменяя частоту ω от 0 до ∞ можно построить на комплексной плоскости годораф (график вектора АФХ), представляющий из себя полуокружность (рисунок а)), которая располагается в четвертом квадранте комплексной плоскости. Диаметр полуокружности равен коэффициенту k.

На рисунке б) показана типовая переходная функция апериодического звена. Как видно из графика, она изменяется по экспоненциальному закону. У любой экспоненты есть одно прекрасное свойство – если к любой ее точке провести касательную, а затем точку пересечения касательной с асимптотой и точку касания спроецировать на ось времени, то получится один и тот же отрезок времени на оси времени. Эта проекция, которую называют постоянной времени, соответствует значению коэффициента Т0 в АФХ и передаточной функции апериодического звена, а ордината асимптоты, к которой стремится экспонента, соответствует коэффициенту k в передаточной функции. Таким образом, по переходной характеристике апериодического звена довольно легко найти коэффициенты Т0 и k в передаточной функции звена.
Физическим примером апериодического звена может быть конденсатор, при подаче напряжения на который заряд происходит не мгновенно, а с определенной задержкой, или же электродвигатель, который при подаче питания разгоняется не мгновенно, а через какое-то время t. На рисунке в) показан пример установки, которую также можно считать апериодическим звеном (вода – заполняющая бак).
В бак поступает определенное количество воды с расходом Q1. В то же время из бака вытекает вода с расходом Q2. Регулируемый параметр в этой системе Хвых – уровень воды в баке H.
При подаче единичного скачка Q1 (открыли входной вентиль) уровень воды H в баке повышается. При этом растет гиростатическое давление и возрастает Q2. Через некоторое время уровень воды H в баке стабилизируется (экспонента приближается к асимптоте). Способность самостоятельно восстанавливать равновесие, которое присуща объектам, аппроксимируемым апериодическим звеном, за счет стока или притока вещества или энергии называют самовыравниванием. Количество самовыравнивания определяет коэффициент р, равный обратному значению коэффициента k в передаточной функции звена, то есть р = 1/k.
В литературе объекты с передаточной функцией апериодического звена называют статическими.
http://habr.com/ru/post/563950/
http://elenergi.ru/aperiodicheskoe-zveno.html