Математическая модель асинхронного двигателя во вращающейся ортогональной системе координат, ориентированной по потокосцеплению ротора
АД имеет трехфазную обмотку на статоре и короткозамкнутую обмотку на роторе. Его принцип действия основан на том, что вращающееся магнитное поле статора, пересекая проводники обмотки ротора, наводит в них напряжение, вызывающее протекание тока в обмотке ротора. Взаимодействие этого тока с потоком статора создает электромагнитный момент, приводящий ротор во вращение. Из этого видно, что для создания момента, вращающего ротор, необходимо, чтобы электрическая частота (скорость) вращения ротора ωr была бы меньше частоты вращения магнитного потока статора ωs, причем ωr=Zp ω, где ω – механическая скорость вращения ротора, Zp – число пар полюсов двигателя. Величина Δω=ωs-ωr называется абсолютным скольжением двигателя, а величина s=(ωs-ωr)/ωsb – относительным скольжением, где ωsb – номинальная электрическая частота питания статора (обычно ωsb=314 1/сек).
Схема замещения двигателя изображена на рис.6.

Рисунок 6 – Схема замещения АД
АД представляет собой нелинейный многомерный объект с достаточно сложной структурой. При его математическом описании большое значение имеет корректность принятых в каждом конкретном случае допущений. Разнообразие математических моделей АД связано с содержанием сделанных допущений, с системой координат, в которых выполнено математическое описание, с содержанием входных и выходных сигналов модели и с системой принятых относительных величин.
В зависимости от принятой системы координат разработаны следующие модели АД:
· модели АД в трехфазной системе координат;
· модели АД в двухфазных ортогональных системах координат;
· однофазные модели на основании статических характеристик АД с упрощенным учетом электромагнитных процессов (на основании схемы замещения АД в установившемся режиме).
Выбор системы координат и конфигурации модели, т.е. состава входных и выходных сигналов, зависит от структуры системы управления, в частности, от состава сигналов, с помощью которых организуются обратные связи, и от особенностей источника питания двигателя.
Удачный выбор математической модели является важным не только при анализе, но и при синтезе системы автоматического управления. Именно разработка модели в системе координат, ориентированной по потокосцеплению ротора, стала основой создания высококачественных систем векторного управления.
Для перехода от математического описания гармонических сигналов в многофазовых координатах к математическому описанию в ортогональных двухфазных координатах используется понятие обобщенного вектора.
Обобщенным называют такой вектор  , проекции которого на оси фаз равны мгновенным значениям соответствующих фазных величин в заданный момент времени.
, проекции которого на оси фаз равны мгновенным значениям соответствующих фазных величин в заданный момент времени.
Для выполнения этой формулировки обобщенный вектор при угле поворота φк должен вращаться против часовой стрелки с угловой скоростью
 , (1)
, (1)
совпадающей с угловой скоростью соответствующего периодического сигнала и иметь модуль, который равен максимальному значению фазной величины
 . (2)
. (2)

Рисунок 7 – Обобщенный вектор и его составляющие
На рис.7 изображен обобщенный вектор какой-либо физической величины ротора  , его проекции на физические оси
, его проекции на физические оси  векторная сумма этих проекций
векторная сумма этих проекций  и проекции обобщенного вектора на действительную d (Re) и мнимую q (Im) оси, первая из которых (vd) совпадает с осью А, а вторая (vq) – расположена перпендикулярно к первой и повернута на угол 90˚ против часовой стрелки.
и проекции обобщенного вектора на действительную d (Re) и мнимую q (Im) оси, первая из которых (vd) совпадает с осью А, а вторая (vq) – расположена перпендикулярно к первой и повернута на угол 90˚ против часовой стрелки.
В литературе [4], [5] показано, что сумма векторов  представляет собой вектор, который совпадает с обобщенным вектором по направлению и превышает его амплитуду в 1,5 раза. С учетом этого можно записать:
представляет собой вектор, который совпадает с обобщенным вектором по направлению и превышает его амплитуду в 1,5 раза. С учетом этого можно записать:
 , (3)
, (3)
 , (4)
, (4)
где  ;
;  ;
;  ;
;
 ,
,
а φνr – угол между направлением обобщенного вектора ротора и осью d:
 .
.
Таким образом, формулы (3) и (4) описывают обобщенный вектор ротора в трехфазной (abc) и ортогональной (dq) системах координат, которые вращаются со скоростью
 ,
,  .
.
Для того, чтобы направление действительной оси ортогональной системы координат совпадало с направлением обобщенного вектора потокосцепления ротора ψr, взятого за основу, система координат должна вращаться синхронно с этим вектором. При этом вектор потокосцепления ротора в ней будет иметь только действительную составляющую, так как проекция этого вектора на мнимую ось q будет равна нулю. Тогда условия математического описания АД в этих координатах будут иметь вид
 , (5)
, (5)
 ;
;  . (6)
. (6)
Модель в системе координат dq стала основой разработки системы векторного управления короткозамкнутым АД. Поэтому в дополнение к условиям (5), (6) добавим условие равенства нулю напряжения ротора
 . (7)
. (7)
При питании обмоток статора двигателя от источника напряжения система векторного управления имеет обратные связи по составляющим тока статора и по потокосцепления ротора. Поэтому еще одним условием для разработки модели АД будет наличие в ней перечисленных сигналов: isd, isq, ψr.
Запишем уравнения, описывающие процессы в АД, в обобщенных векторах с учетом условия (7):
 (8)
(8)
где ωк – частота вращения системы координат;
ωr – электрическая частота вращения ротора;
Us, is – напряжение и ток статора;
Rs – сопротивление обмотки статора;
ir – ток обмотки ротора;
R’r – приведенное сопротивление обмотки ротора;
Ψr – потокосцепление ротора.
Для короткозамкнутого двигателя векторы 
 отличаются друг от друга из-за наличия рассеяния обмоток статора и ротора. В этой связи для них можно записать:
отличаются друг от друга из-за наличия рассеяния обмоток статора и ротора. В этой связи для них можно записать:
 (9)
(9)
где Lm – главная индуктивность рассеяния;
Lsl, Lrl – индуктивность рассеяния обмоток.
При этом для индуктивностей обмоток статора Ls и ротора Lr будем иметь:
 (10)
(10)
Для того, чтобы обеспечить оговоренный ранее состав сигналов модели, найдем обобщенные вектора тока ротора и потокосцепления статора:
 ; (11)
; (11)
 , (12)
, (12)
где  ;
;  .
.
После подстановки уравнений (11), (12) в систему уравнений (8) получим:
 (13)
(13)
где электромагнитная постоянная времени
 .
.
Для того, чтобы первое уравнение системы (13) имело производную только от одного сигнала, выразим производную от потокосцепления ротора во втором уравнении .той же системы и подставим полученное выражение в первое:
 (14)
(14)
 (15)
(15)
Перепишем (14) и (15) с учетом их проекций на оси d и q. Получим следующую систему
 (16)
(16)
 ,
, 
и перепишем дифференциальное уравнение (16) в операторной форме:
 (17)
(17)
В последнем уравнении системы (17) обозначим:

 (18)
(18)
— скорость ротора и абсолютное скольжение, приведенные к скорости электромагнитного поля.
Уравнение для электромагнитного момента двигателя представляется как [4], [6]:
 . (19)
. (19)
При этом уравнение механического равновесия запишется в обычном виде:
 ,
,
где J – приведенный момент инерции электропривода.
По полученным выше уравнениям в пакете Matlab составим модель короткозамкнутого АД. Она приведена на рис.8, с учетом того, что Lsl=σLs
Приведенная структурная схема может быть использована при исследовании асинхронного электропривода с системой векторного управления при управлении по потокосцеплению ротора. Модель имеет два линейных канала управления, что значительно упрощает синтез передаточных функций регуляторов. При этом в системе управления в зависимости от параметров двигателя должны быть скомпенсированы внутренние перекрестные обратные связи с воздействиями Ukd и Ukq.

Рисунок 8 – Структурная схема АД с КЗ ротором во вращающейся системе координат, ориентированной по потокосцеплению ротора.
На рис.8 обозначено: Ukd – напряжение перекрестной связи по каналу реактивного тока (для компенсации);
Ukq – напряжение перекрестной связи по каналу активного тока (для компенсации).
1.3.1 Модель в системе координат α, β
Система координат α, β применяется для анализа систем электропривода с управлением двигательными и тормозными режимами асинхронных машин по цепи статора, в том числе при анализе систем с векторным управлением и для исследования режимов при несимметрии статорных цепей.
Определенную сложность при построении модели АД в системе координат α, β представляет то обстоятельство, что эквивалентные напряжения  и
и  изменяются во времени по синусоидальному закону с постоянной частотой источника электроэнергии ω0эл = 2pfс, рад/с.
изменяются во времени по синусоидальному закону с постоянной частотой источника электроэнергии ω0эл = 2pfс, рад/с.
Структурная схема для моделирования соответствующих напряжений статора представлена на рисунке 3.5.

Рисунок 9 – Схема задания напряжения статора
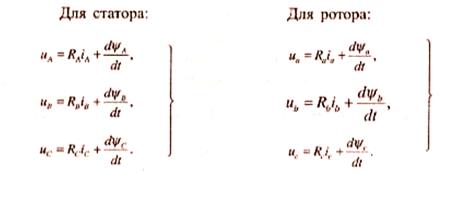
Уравнения электрического равновесия в осях a, b принимают вид [2]:
 (20)
(20)

Рисунок10 — Структурные схемы АД в системах координат α, β
1.3.2. Модель в системе координат x,y
Систему координат x, y используют преимущественно для исследования режимов синхронных и асинхронных машин при несимметрии ротора. Она наиболее целесообразна при расчете систем электропривода с машинами двойного питания, например, каскадных схем управления АД с фазным ротором. При этом статорные и роторные переменные изменяются по синусоидальному закону с частотой скольжения двигателя.
В синхронных машинах в статических режимах работы w0.эл = wэл, поэтому использование системы координат x, y позволяет оперировать соотношениями, аналогичными постоянному току.
Выбор wk = wэл = ωr соответствует преобразованию реальных переменных машины к осям x, y, жестко связанным с ротором машины. При таком преобразовании напряжения и токи являются переменными величинами, но имеют как в роторной, так и в статорной обмотке частоту тока ротора wr.эл = w0.эл — wэл. Проекции вектора напряжения на координатные оси x и y определяются выражениями:
 ,
,  . (21)
. (21)
На рис. 3.6 изображена структурная схема формирования питающих напряжений обмоток статора  и
и  :
:

Рисунок 11 – Структурная схема модели источника синусоидального
напряжения переменной частоты
Уравнения электрического равновесия в осях x, y принимают вид:
 (22)
(22)
Потокосцепления обмоток определяются результирующим действием токов всех обмоток статора и ротора:
 , (23)
, (23)
Из уравнения (3.8) определим токи обмоток статора и ротора:
 (24)
(24)
И в итоге получаем:
 , (25)
, (25)
 Рисунок12 — Структурные схемы АД в системах координат x, y
Рисунок12 — Структурные схемы АД в системах координат x, y
1.3.3. Модель в системе координат d, q
Третью систему координат d, q целесообразно использовать только для исследования симметричных режимов асинхронных машин, если ее применение приводит к упрощению описаний возмущающих воздействий.
Модели d,q, также как и x,y, привязаны к скорости поля статора (или ротора), что ограничивает область их применения только случаями питания статора АД синусоидальнымнапряжением.
питания, что во много раз усложняет расчет.
Выбор wk = w0.эл, позволяет осуществить преобразование к осям d, q, вращающимся с синхронной скоростью поля машины. При этом уравнения электрического равновесия записываются так [1,2]:
 (26)
(26)
К реальным обмоткам статора приложена симметричная двухфазная система напряжений. При ωk = ω0эл и φk = ω0элt выражения для напряжений имеют вид:
 (27)
(27)
Таким образом получаем:
 (28)
(28)

Рисунок12 — Структурные схемы АД в системах координат d, q
2 Расчет параметров двигателя и регуляторов
Математическая модель асинхронного трехфазного двигателя с фазным ротором, не использующая понятие вращающегося магнитного поля
Введение
Построенная во многих источниках [1–4] модель асинхронного двигателя исходит из существования в его воздушном зазоре кругового вращающегося магнитного поля, создаваемого системой синусоидальных напряжений, прикладываемых к фазным обмоткам статора, при соответствующих углах сдвига напряжений по фазе, а фазных обмоток — в пространстве.
Поскольку магнитное поле создают токи в обмотках АД, круговое вращающееся поле в его воздушном зазоре существует только при синусоидальных токах фазных обмоток. В переходных режимах токи при синусоидальных напряжениях не являются синусоидальными из-за наличия свободных (переходных) составляющих. Поэтому, строго говоря, при построении математической модели АД, пригодной как в установившихся, так и в переходных режимах работы, не следует исходить из существования в воздушном зазоре кругового вращающегося поля, что справедливо только в установившемся режиме.
В статье сделана попытка построить математическую модель АД с фазным ротором, исходя только из законов электротехники и закона Ампера, не используя сложные математические преобразования, уводящие, по мнению автора, от физической сущности процессов преобразования энергии в электрической машине, но не позволяющие получить аналитическое решение описывающих ее дифференциальных уравнений.
Вывод уравнений АД
При выводе уравнений АД примем следующие обычные допущения:
- магнитная цепь двигателя не насыщена;
- ток каждой фазы статора (A, B, C) вызывает в зазоре составляющую магнитной индукции, распределенную по гармоническому закону

где iq — ток фазы q; aq — угол, отсчитываемый от оси фазной обмотки в направлении, принятом за положительное; KB = const;
- обмотки статора и ротора соединены «звездой»;
- АД имеет одну пару полюсов;
- взаимоиндуктивность между обмотками статора и ротора зависит от косинуса угла между их осями:

где aqk — угол между осями обмотки статора и обмотки ротора, отсчитываемый от оси обмотки статора в направлении, принятом за положительное направление отсчета; Mm — максимальная взаимоиндуктивность, соответствующая совпадению осей обмоток;
- взаимоиндуктивности между обмотками статора одинаковы, отрицательны и равны –MS;
- взаимоиндуктивности между обмотками ротора одинаковы, отрицательны и равны –MR;
- пренебрегаем явлениями на концах ротора;
- не учитываем паразитные моменты асинхронного двигателя.
Состояние АД как динамической системы определяется тремя токами статора: iA, iB, iC, тремя токами ротора: iа, ib, iс, углом поворота ротора a и частотой его вращения W = da/dt. В действительности условие iA + iB + iC = 0, ia + ib + ic = 0 уменьшает число независимых токов статора и ротора на 2.
На рис. 1а, изображающем поперечное сечение АД-обмотки статора и ротора обозначены одним витком: AX, BY, CZ, ax, by, cz соответственно.

Рис. 1. Поперечное сечение АД
Положительное направление токов на рис. 1 обозначено крестиками и точками. Угол поворота ротора отсчитывается от оси обмотки фазы AX статора до оси обмотки ротора, обозначенной буквами ax, против часовой стрелки.
Электромагнитный вращающий момент Mr, действующий на ротор, создается силами взаимодействия токов ротора с магнитным полем, созданным токами обмоток статора. Для определения мгновенного значения электромагнитного вращающего момента Mr, действующего на ротор, достаточно знать мгновенные значения токов статора и ротора и угол поворота ротора относительно статора.
Для определения Mr воспользуемся подходом, аналогичным подходу, примененному при определении вращающего момента синхронного двигателя с постоянными магнитами на роторе (СДПМ) [5, 6]. Вначале определим вращающий момент каждой фазы ротора, вызванный взаимодействием ее тока с магнитным полем, создаваемым токами обмоток статора. Сумма вращающих моментов обмоток ротора даст значение Mr.
Рассмотрим момент, действующий на обмотку ax. Если положительное направление оси обмотки статора связано с положительным направлением тока обмотки правилом правого винта, то при положительном токе обмотки магнитная индукция в точке зазора, совпадающей с положительной полуосью обмотки, направлена от ротора к статору, считается положительной и имеет максимальное значение. В противоположной точке зазора индукция направлена от статора к ротору, считается отрицательной и имеет минимальное значение.
Выберем положительное направление оси обмотки ротора, связанное с положительным направлением тока в ней также правилом правого винта.
Нетрудно убедиться, что при положительных токах в обмотке фазы статора и в обмотке фазы ротора силы Ампера, действующие на активные проводники обмотки ротора, создают вращающий момент, направленный противоположно угловому отклонению оси обмотки ротора от оси обмотки статора (рис. 1б, в). При совпадении осей обмоток статора и ротора вращающий момент, создаваемый взаимодействием тока фазы k ротора и магнитного поля, созданного током фазы q статора, равен нулю. Причина в симметричном расположении проводников фазы k ротора относительно нулевых значений индукции магнитного поля, созданного обмоткой фазы q статора. При повороте ротора на угол a > 0 (рис. 1б) проводники обмотки фазы k ротора с током ia, направленным на нас, расположены в секторе:

Проводник с током обмотки фазы k, находящийся в середине сектора, создает при положительной индукции магнитного поля положительный вращающий момент (направленный против часовой стрелки).

где D — диаметр ротора; l — активная длина проводников обмотки ротора; ik — ток фазы k; Bq — индукция магнитного поля, созданная током фазы q статора; q = A,B,C, k = a,b,c.
С учетом выражений (1) формула (4) принимает вид:

Полагая равномерным распределение n витков обмотки ротора внутри сектора (3), получаем с учетом симметричной второй половины фазной обмотки суммарный электромагнитный вращающий момент (6),
Положим, что угол a отсчитывается от оси фазы обмотки A статора до оси обмотки фазы a ротора. Тогда, полагая, что оси статорных обмоток B и C сдвинуты относительно оси обмотки A в направлении, принятом за положительное, на угол 2p/3 и 4p/3 соответственно, как и оси обмоток фаз b и c относительно оси обмотки фазы a, можно записать выражения моментов, действующих на фазные обмотки ротора (7).

Суммарный электромагнитный момент, действующий на ротор, равен их сумме:
Электрическая схема статора, представленная на рис. 2а, имеет три ветви, два узла и три контура. Электромагнитные процессы в обмотках статора описывает система трех уравнений, одно из которых составлено по первому закону Кирхгофа:
а два других уравнения составлены по второму закону Кирхгофа. Ниже записаны уравнения для всех трех контуров (10).

Рис. 2. Схемы обмоток:
а) статора;
б) ротора


где LS — индуктивность обмотки фазы статора; R — ее активное сопротивление; Mqk — взаимоиндуктивность обмотки фазы q статора и обмотки фазы k ротора; q = A, B, C; k = a, b, c; –MC — взаимоиндуктивность обмоток фаз статора.
Электрическая схема ротора, представленная на рис. 2б, также имеет три ветви, два узла и три контура. Электромагнитные процессы в обмотках ротора описывает система трех уравнений, одно из которых составлено по первому закону Кирхгофа:
а два других уравнения составлены по второму закону Кирхгофа. Ниже записаны уравнения для всех трех контуров: (13),


где Lr — индуктивность обмотки фазы ротора, r — ее активное сопротивление: Mqk — взаимоиндуктивность обмотки фазы q ротора и обмотки фазы k статора: q = a, b, c; k = A, B, C; MР — взаимоиндуктивность обмоток ротора.
Используя допущение (2), легко доказать равенства:
С учетом равенств (9), (15) и очевидного равенства uAB + uBC + uCA = 0 система дифференциальных уравнений электромагнитных процессов в статоре (9) допускает декомпозицию (17).

С учетом равенств (12) и (16) система дифференциальных уравнений электромагнитных процессов в роторе (13) также допускает декомпозицию:

Дифференцирование потокосцепления обмотки фазы статора q c обмоткой фазы k ротора дает:

С учетом одинаковой частоты вращения обмоток ротора, равной скорости вращения ротора, получаем:

Электромеханические процессы в АД описываются уравнением движения ротора:

где J — суммарный момент инерции двигателя и нагрузки; MH — момент нагрузки, определяемый уравнениями (7) и (8).
Математическая модель АД, управляемого напряжениями на обмотках статора, описывается уравнениями (7), (8), (17)–(22).
С учетом равенства Mqk = Mkq можно угловые соотношения (20) подставить в уравнения электромагнитных процессов в статоре и роторе и исключить соотношения (20) из системы уравнений АД, что дает (17’), (18’).


Построение стационарного режима
Значительный интерес вызывает стационарный режим при линейных напряжениях, представляющих собой трехфазную симметричную систему напряжений. В этом случае, как известно,

То есть и фазные напряжения образуют симметричную трехфазную систему.
Желательным при постоянном моменте нагрузки Mн является режим постоянной частоты вращения ротора W = da/dt, синусоидальных токов статора и ротора, образующих симметричные трехфазные системы, и постоянный вращающий момент АД Mr, равный моменту нагрузки.
Будем искать решение двух систем уравнений (17’) и (18’) в виде

Подстановка в систему уравнений (17’) приводит ее к трем одинаковым уравнениям, отличающимся только сдвигом по фазе гармонических функций:

Аналогично система уравнений (18’) переходит в систему трех уравнений:

Из уравнений (23), (24) можно вычислить четыре параметра, определяющих стационарный электромагнитный режим статора и ротора: Ims, js, и Imr, jr.
Наиболее просто это сделать с помощью метода комплексных амплитуд. Для уравнений, соответствующих i = 0, выполним подстановку t = t + (p/2)/w в уравнении (23) и t = t + (p/2)/ν — в уравнении (24) и, умножив обе части полученных на мнимую единицу j, сложим их с исходными уравнениями. Использовав формулу Эйлера и сократив обе части комплексных уравнений на e — j w t и e — j w t соответственно, получаем систему двух комплексных уравнений:

Решение системы уравнений (25) имеет вид:

Решение (26) системы уравнений (23), (24) определяет амплитуды фазных токов статора и ротора:

Для определения вращающего момента, создаваемого обмоткой фазы a ротора Ma, подставим выражения токов в стационарном режиме в уравнения (6) и (7), что дает:


В результате сложения вращающих моментов фазных обмоток ротора, согласно формуле (7), составляющие момента, пульсирующие с частотой 2v, уничтожаются, что дает:

Подстановкой в формулу (29) выражений (27) и (28) получаем:


в последней формуле дает:


Исследование зависимости вращающего момента АД от абсолютного скольжения v дает две симметричные стационарные точки:

Положительная стационарная точка соответствует максимуму, а отрицательная — минимуму вращающего момента:

Из выражения (30) следует, что в стационарном режиме вращающий момент АД постоянен, не зависит от углового положения ротора и пропорционален квадрату напряжения питания, что подтверждает известные факты. Характер зависимости вращающего момента АД от скольжения Mr(n) также совпадает с известным ее характером.
Цифровая модель асинхронного двигателя
Полученная математическая модель АД существенно нелинейна, что не позволяет получить аналитическое решения ее дифференциальных уравнений, за исключением частных случаев. Поэтому для исследования процессов в АД в системе Mathlab Simulink построена его цифровая модель, представленная на рис. 3. Схема блока subsystem изображена на рис. 4.
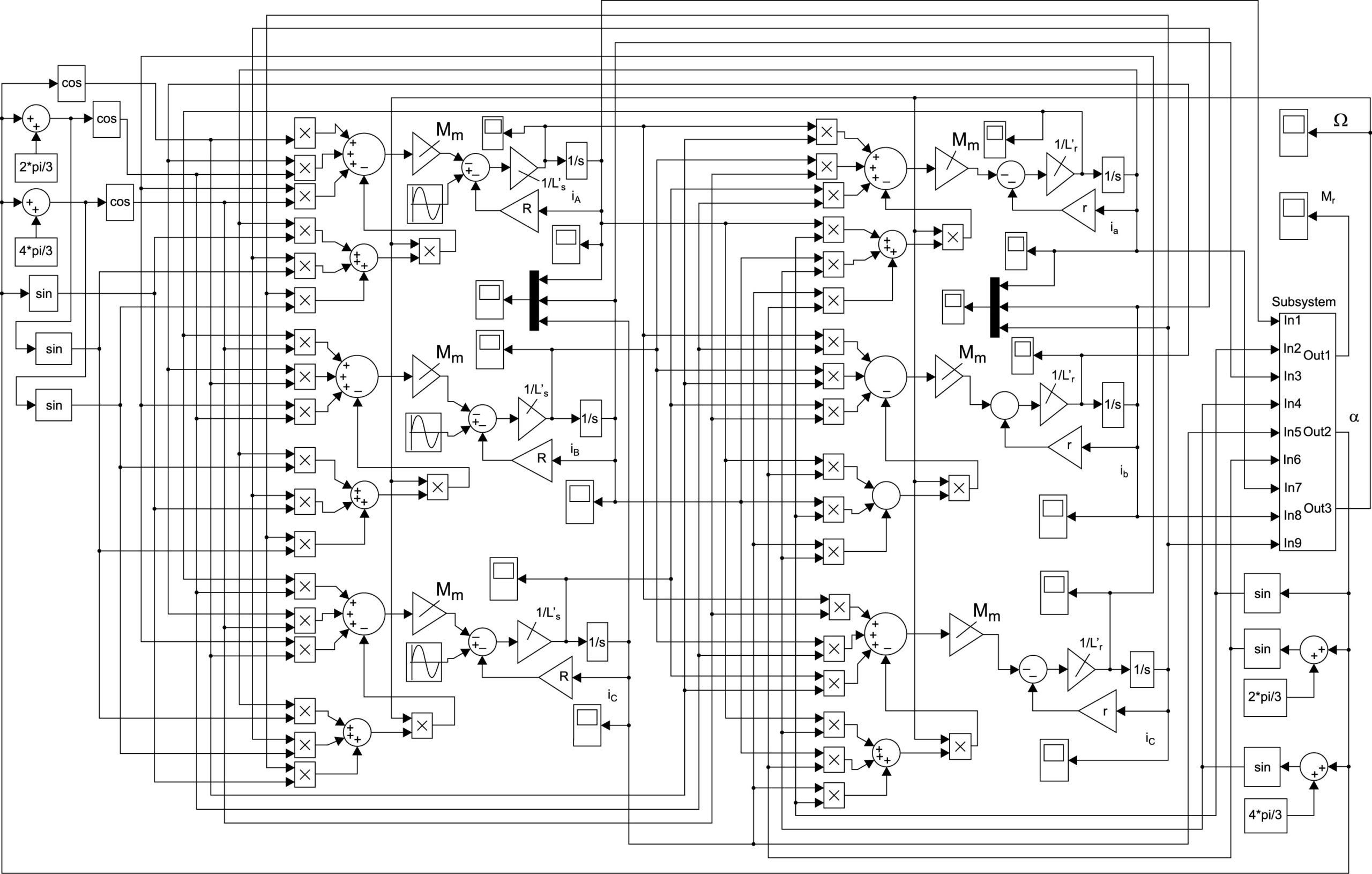
Рис. 3. Цифровая модель АД

Рис. 4. Схема блока subsystem
Для оценки корректности цифровой модели желательно иметь аналитическое решение дифференциальных уравнений хотя бы для частного случая. Таковым оказывается случай заторможенного АД. Электромагнитные процессы здесь описывает система линейных дифференциальных уравнений. Переход к изображениям по Лапласу при нулевых начальных условиях и системе трехфазных напряжений приводит ее к виду (35), где Ik, Uq — изображения по Лапласу ik, k = A, B, C, a, b, c и uq, q=A, B, C,


Система линейных уравнений (35) имеет решение:


Uq, q = 1, 2, 3 — изображения по Лапласу напряжений

Используя выражения (36), несложно определить амплитуды фазных токов статора ISm и ротора Irm:

Выполнив обратное преобразование Лапласа в выражениях (36) и подставив выражения фазных токов в формулу вращающего момента (7) и (8), можно получить аналитическое выражение зависимости Mr(t) при заторможенном роторе АД. Чтобы избежать трудоемких преобразований и громоздких формул, можно использовать имитационное моделирование в системе Mathlab SIMULINK по структурной схеме, представленной на рис. 5.
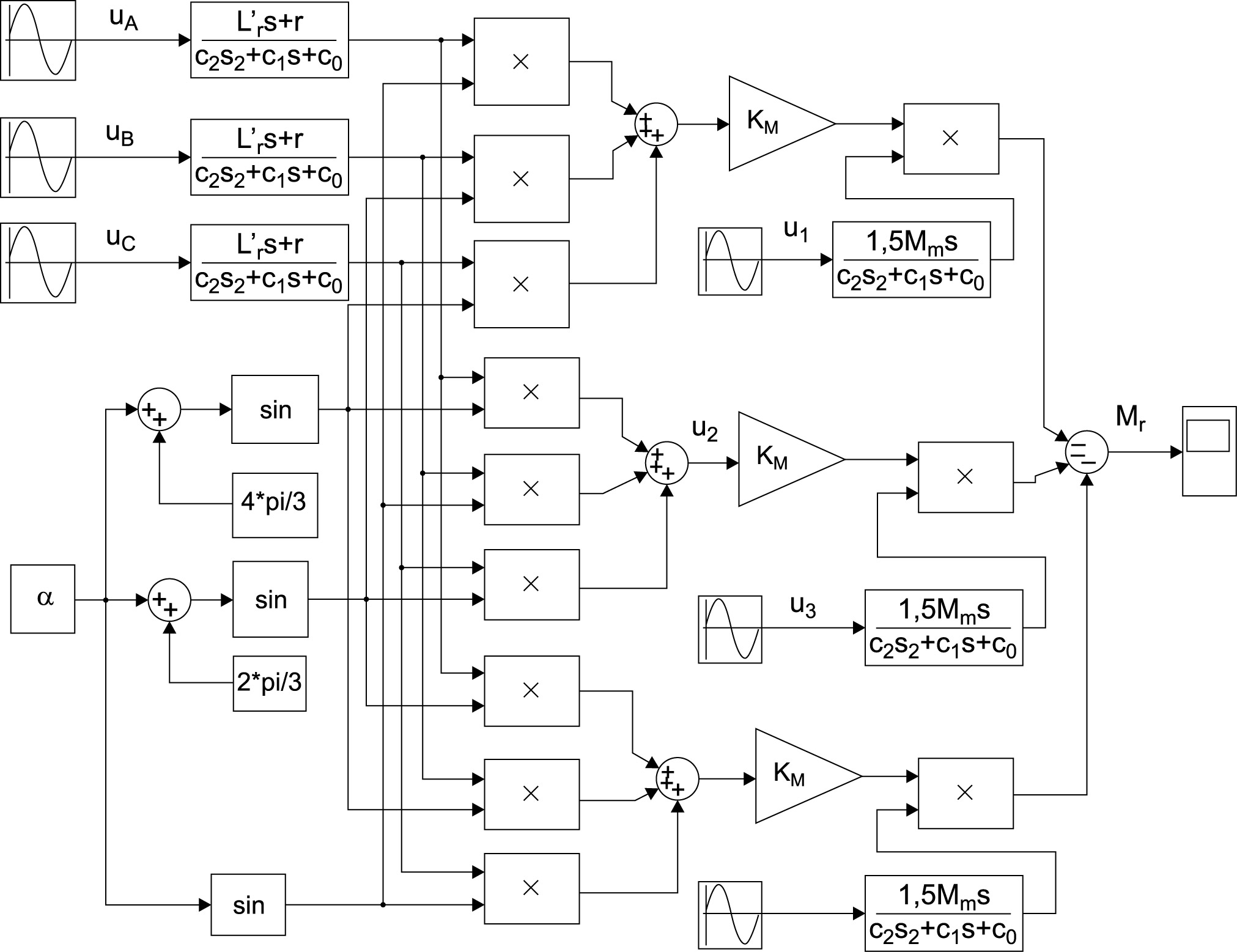
Рис. 5. Структурная схема заторможенного АД
Применение модели к анализу процессов в АД
Для применения полученных результатов рассмотрим гипотетический АД небольшой мощности, ротор которого имеет диаметр D = 0,4 м, а длину l = 0,6 м. Положив среднюю плотность ротора несколько большей плотности железа и равной 8 × 10 3 кг/м 3 , получаем момент инерции ротора J = 3,84·p кгм 2 . C учетом полюсного деления t = pD/6 = 209 мм, приняв зубцовое деление порядка 5 мм, можно выбрать число витков обмотки фазы ротора n = 40. Приняв ориентировочно площадь эффективного сечения провода обмотки S = 8 мм 2 , длину фазовой обмотки lo = 2(D + l)n = 80 м, удельное сопротивление меди при температуре 75 °С равным 1/47 × 10 -6 Ом·м [2], получаем ориентировочное значение сопротивления r = 0,2 Ом. Приняв воздушный зазор d = 3 мм, обмоточный коэффициент kоб = 0,95, получаем согласно [2] главную индуктивность фазы порядка 0,09 Гн. Положив индуктивность рассеяния составляющей 10% от главной индуктивности, получаем Lr = 0,1 Гн. Положим для простоты параметры обмоток статора и ротора одинаковыми. Примем взаимоиндуктивность обмоток статора и ротора равной главной индуктивности, то есть Mm = 0,09 Гн, MС = MР = 0,045 Гн, получаем L ‘ s = L ‘ r = 0,145R Гн, R = r = 0,2 Ом. Определив ориентировочное значение коэффициента KB = m0n/2d = 8,4 × 10 -3 Тл/А, вычисляем коэффициент KM (6), равный 0,0768 Нм/А 2 .
Для выбранных параметров АД по формуле (27) для Um = 311 B, w = 100p 1/c рассчитана зависимость электромагнитного вращающего момента от абсолютного скольжения Mr(v). На рис.6 построена зависимость Mr от относительного скольжения s = n/w.

Рис. 6. Зависимость электромагнитного момента ротора Mr от относительного скольжения s = v/ω
По формулам (29) и (30) вычислены значения vm=10,352 1/c, (sm=0,033), Mrm=27,357 Нм. Подставив в формулу (27) v = w, получаем Mr п =1,8489 Нм.
Использование полученной модели АД для анализа переходных процессов дает пример построения электромагнитного процесса при включении трехфазного напряжения с амплитудой Um = 311 В и частотой w = 100p 1/с при постоянной синхронной частоте вращения ротора W=w и приложении момента нагрузки MН = 15 Нм после окончания электромагнитного переходного процесса. До окончания электромагнитного переходного процесса вращающий электромагнитный момент Mr в модели был отключен от двигателя. Временные диаграммы Mr, W, токов статора и ротора: iA, iB, iC, ia, ib, ic, (рис. 7). Моделирование проводилось в системе MATHLAB 6.5 SIMULINK 5 методом ode 23 при относительной погрешности 1×10 -6 .

Рис. 7. Временные диаграммы Mr, W, токов статора и ротора: iA, iB, iC, ia, ib, ic
Для проверки корректности цифровой модели АД, представленной на рис. 3, проведено моделирование процесса, вызванного приложением трехфазного напряжения Um=311 В и частотой w = 100p 1/с при заторможенном роторе. Значения ISm = 51,161 A, Irm = 47,633 A, Mr = 1,8489 Н·м в установившемся режиме совпали со значениями определенными аналитическим методом, и со значениями, рассчитанными по формулам для стационарного режима (27) и (31) при v = w. Зависимости Mr(t) в переходном режиме , полученные аналитическим методом и путем моделирования, совпадают с высокой точностью. Например, максимальное значение Mr и момент его достижения, определенные путем моделирования и аналитическим методом, составляют 27,627 и 27,626 Н·м, 0,17472 и 0,17477 с соответственно.
Выводы
- Математическая модель АД, построенная без использования предположения о существовании кругового вращающегося поля в его воздушном зазоре и различных преобразований координат, подтверждает все основные свойства АД в переходных и установившихся режимах.
- Модель справедлива при любом характере изменения параметров трехфазной системы напряжений питания обмотки статора (частоты и величины напряжений).
3. Построенная цифровая модель АД позволяет исследовать процессы изменения токов статора и ротора, вращающего электромагнитного момента, частоты вращения ротора как в переходных, так и в установившихся режимах и выбирать наиболее благоприятные соотношения параметров двигателя.
Математическое описание обобщенной асинхронной машины
Обобщенная асинхронная машина показана на рис 3.1. она содержит трехфазную обмотку на статоре и трехфазную обмотку на роторе. Обмотки статора и ротора подключены к трехфазным источникам напряжения. Математическое описание такой машины базируется на известных законах.
Уравнения равновесия э.д.с на обмотках статора и ротора базируются на втором законе Кирхгофа.
.  ( 3.1)
( 3.1)
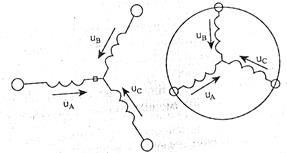
Рис.3.1 Обобщенная асинхронная машина
В уравнениях (3.1) фигурируют мгновенные напряжения, токи и потокосцепления статора и ротора, а также активные сопротивления обмоток. Обычно обмотки выполняются симметричными, и поэтому RA=RB=Rc=Rs-активное сопротивление статорной обмотки, Ra=Rb=Rc=Rs — активное сопротивление роторной обмотки.
Вторым используемым законом является закон Ампера, который связывает потокосцепления обмоток с токами, протекающими по обмоткам:
 (3.2)
(3.2)
Удивительно симметричные уравнения для определения потокосцеплений показывают, что потокосцепление зависит от токов во всех обмотках; эти зависимости проявляются через взаимоиндукцию. В уравнениях (3.2) Laa,Lbb,Lcc, LA,LBB,Lcc,Lss являются собственными индуктивностями соответствующих обмоток, все остальные – взаимоиндуктивностями между соответствующими обмотками.
Третьим законом, лежащим в основе анализа, является второй закон Ньютона – закон равновесия моментов на валу машины:
 (3.3)
(3.3)
где J(кгм) – момент инерции на валу машины, учитывающий инерционность как самой машины, так и приведенной к валу инерционности рабочего механизма и редуктора,  — угловая скорость вала машины, — момент рабочего механизма, приведенный к валу, в общем случае он может быть функцией скорости и угла поворота.
— угловая скорость вала машины, — момент рабочего механизма, приведенный к валу, в общем случае он может быть функцией скорости и угла поворота.
Наконец, четвертым и последним законом, лежащим в основе анализа машины, является закон, сформулированный Ленцем, правило левой руки. Этот закон связывает векторные величины момента ,потокосцепления и тока:
Следует сразу подчеркнуть, что, несмотря на полное их математическое описание, использование уравнений (3.1,3.2) для исследования машины встречает серьезные трудности.
-в уравнениях ( 3.3)фигурируют векторные величины, а в уравнениях ( 3.1,3.2) скалярные;
-количество взаимосвязанных уравнений равно 16, а количество коэффициентов -44;
-коэффициенты взаимоиндукции между обмотками статора и ротора в уравнениях (3.1) являются функцией угла поворота ротора относительно статора, то есть уравнения являются уравнениями с переменными коэффициентами.
-уравнение (3.3) является нелинейным, так как в нем перемножаются переменные.
На пути упрощения математического описания асинхронной машины, да и вообще всех машин переменного тока, удивительно простым и изящным оказался метод пространственного вектора тока который позволил существенно упростить и сократить выше приведенную систему уравнений; метод позволяет связать уравнения (3.1 — 3.3) в единую систему с векторными переменными состояния. Сущность метода состоит в том, что мгновенные значения симметричных фазных переменных состояния (напряжения, токи, потокосцепления) можно математически преобразовать так, чтобы они были прикреплены одним пространственным вектором это математическое преобразование
 (3.4)
(3.4)
имеет вид (например, для тока статора).
На рис.3.2 представлена геометрическая интерпретация пространственного вектора тока- это вектор на комплексной плоскости с модулем (длиной),вращающийся с угловой скоростью в положительном направлении. Проекции вектора на фазные оси А,В,С определяют мгновенные токи в фазах. Аналогично пространственными векторами можно представить все напряжения, токи и потокосцепления, входящие в уравнения (3.1),(3.2).
Теперь можно переходить к упрощению уравнений.

Рис.3.2. Пространственный вектор тока.
Шаг первый. Для преобразования уравнений (3.1) в мгновенных значениях к уравнениям в пространственных векторах умножим их на выражения; первые уравнения на 2/3, вторые – на 2/3а,третьи — на 2/3а, — и сложим раздельно для статора и ротора. Тогда получим:
 (3.5)
(3.5)
где L,L- собственные индуктивности статора и ротора,L взаимная индуктивность между статором и ротором. Таким образом, вместо двенадцати уравнений (3.1) – (3.2) получено четыре уравнения (3.5).
Шаг второй. Переменные коэффициенты взаимной индукции уравнениях (3.5) для потокосцеплений являются результатом того что уравнения равновесия эдс для статора записаны в неподвижной системе координат, связанной со статором, а уравнения равновесия эдс для ротора записаны во вращающейся системе координат связанной с ротором. Метод пространственного вектора позволяет записать эти уравнения в единой системе координат, вращающей произвольной скоростью В этом случае уравнения образуются к виду:
 (3.6)
(3.6)
В уравнениях (3.6) все коэффициенты являются величинами постоянными, имеют четкий физический смысл и могут быть определены по паспортным данным двигателя, либо экспериментально.
Шаг третий. Этот шаг связан с определением момента который является векторным произведением любой пары векторов. Из уравнения (3.6) следует, что так может быть шесть. Часто в рассмотрение вводится потокосцепление взаимной индукции . В этом случае появляется еще четыре возможности представления электромагнитного момента машины через следующие пары. После выбора той или иной пары уравнение момента приобретает определенность, а количество уравнений в системе сокращается до двух. Кроме того, в уравнениях и векторные величины момента и скорости могут быть заменены их модульными значениями. Это является следствием того, что пространственные векторы токов и потокосцеплений расположены в плоскости, перпендикулярной оси вращения, а векторы момента и угловой скорости совпадают с осью. В качестве примера покажем запись уравнений момента через некоторые пары переменных состояния машины.
 (3.7)
(3.7)
Шаг четвертый. На этом этапе уравнения (3.3),(3.6),(3.7) приводятся к безразмерным относительным величинам. В качестве основных базовых величин выбираются амплитудные номинальные значения фазного напряжения и тока, а также номинальное значение угловой частоты:
 (3.8)
(3.8)
На этой основе определяются базовые значения всех переменных и коэффициентов, входящих в уравнения, а также базового времени:
 (3.9)
(3.9)
В дальнейшем используются уравнения только в относительных величинах. Обобщенная система уравнений для описания асинхронной машины принимает вид:
 (3.10)
(3.10)
В этих уравнениях все переменные относительные, полученные как результат деления реальных значений на базовые, все коэффициенты также безразмерные, полученные аналогично. Переменные и параметры в относительных единицах:
 — относительные электромагнитные переменные состояния
— относительные электромагнитные переменные состояния
 — относительная частота статора и относительная скорость ротора
— относительная частота статора и относительная скорость ротора
 — относительный момент на валу машины
— относительный момент на валу машины
 — относительные параметры
— относительные параметры
Безразмерные коэффициенты ряда асинхронных машин даны в приложении.
В уравнениях (3.9) время принято безразмерным , то есть единицей измерения времени является не секундной. Следует отметить, что введение относительных величин существенно сокращает время моделирования и позволяет устранить многие проблемы при моделировании. Рассмотрим предварительно вопросы преобразования координат, а затем модели асинхронной машины в различных системах координат и их основные характеристики.
Дата добавления: 2015-06-17 ; просмотров: 1460 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
http://power-e.ru/electrodrives/model-asinhronnogo-dvigatelya/
http://helpiks.org/3-86813.html